К расчету динамики установившегося движения выходного звена в волновой реечной передаче

Автор: Лимаренко Герольд Николаевич, Шевчугов Максим Викторович, Щепин Александр Николаевич
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Математика, механика, информатика
Статья в выпуске: 2 (42), 2012 года.
Бесплатный доступ
Приведены результаты теоретических исследований и методов расчета в поступательном приводе с волновой реечной передачей неравномерности установившегося движения его выходного звена - роликовой рейки, взаимодействующей с многокулачковым механизмом.
Толкатель, диаграмма, фазовый сдвиг, приведенный момент инерции, динамическая ошибка скорости
Короткий адрес: https://sciup.org/148176820
IDR: 148176820 | УДК: 631.331
To dynamic analysis of steady motion of an output element in wave rack and pinion drive
The authors present the results of theoretical researches and method of analysis in forward drive with harmonic rack-and-pinion drive of irregularity of steady motion of its rolling strip, namely, outlet link, which interacts with multicam mechanism.
Текст научной статьи К расчету динамики установившегося движения выходного звена в волновой реечной передаче
Волновая реечная передача (ВРП) с роликовой рейкой [1] основана на взаимодействии многокулачкового вала с толкателями, контактирующими с выходным звеном – рейкой на линейных участках диаграмм их относительного движения. Количество толкателей в механизме преобразования движения выбирается сдвиг, приведенный момент инерции, динамическая таким, чтобы в зацеплении с роликами рейки одновременно находилось не менее двух толкателей. Это теоретически обеспечивает линейность функции положения выходного звена, малые изменения характеристики приведенной жесткости и равномерное распределение движущих сил по промежуточным звеньям.
Вместе с тем известно, что работа кулачковых механизмов сопряжена с возникновением переменных ускорений на участках разгона и выбега при удалении и приближении толкателей. Переменные ускорения создают переменные силы инерции и динамическая система привода становится нелинейной. Одновременно с переменными ускорениями в системе возникают переменные аналоги скоростей центров масс звеньев, что вызывает переменность работы сил сопротивлений при их движении в механизме. В приводах с подобными механизмами возникает внутренняя виброактивность, снижающая их динамическое качество.
Динамический анализ привода при взаимодействии с механической системой, имеющей переменные параметры (содержащей шарнирно-рычажные и кулачковые механизмы), методом последовательного приближения разработан М. З. Коловским и подробно освещен в научной и учебной литературе [2; 3]. Волновая реечная передача является своеобразным многокулачковым механизмом, в котором исполнительный орган – рейка – перемещается с постоянной скоростью подобно гайке в винтовом механизме. Приводной вал содержит Z кулачков, установленных с фазовым разворотом друг относительно друга на угол ф = 2 п / Z . Промежуточные приводные звенья -толкатели – перемещаются в корпусе механизма в соответствии с диаграммами (рис. 1) [1], взаимодействуя с роликами рейки на ее линейных участках, с фазовым сдвигом. Перемещение толкателей на остальных участках диаграммы происходит без взаимодействия с роликами рейки.
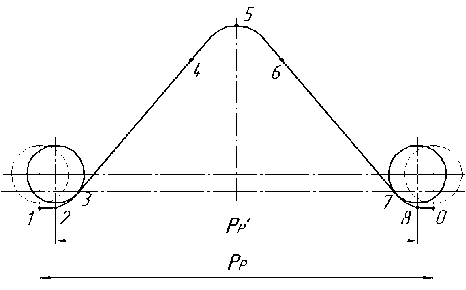
Рис. 1. Диаграмма относительного движения толкателей с участками:
1–2 – нижнего выстоя; 2–3 – разгона; 3–4 – линейного движения; 4–5 – выбега; P p , P′ p – шаг рейки и расчетный шаг.
Участки приближения толкателя симметричны участкам его удаления
Рассмотрим принципиальную схему ВРП (рис. 2). За один оборот кулачкового вала толкатели последовательно войдут в контакт с роликами рейки и каждый переместит ее на величину А Р = P p / Z . Приводной управляемый электродвигатель соединен непосредственно с кулачковым валом через муфту.
Исследование установившегося движения агрегата выполним, воспользовавшись статической характери- стикой двигателя. В этом случае задача сводится к отысканию периодического решения уравнения
-
.. 0,5 ■ J ( q ) . 7 . .
J пр ( q ) q +-----, ( q )2 = Q д м ( u , q ) + T c( q , q ) , (1)
dq где Jпр (q) – переменный приведенный момент инер ции машинного агрегата; Qд.м(u, q) – идеальная характеристика движущего момента, зависящая от напряжения u и скорости ротора q ; Tc(q, q) – приведенный момент активных сил сопротивления.
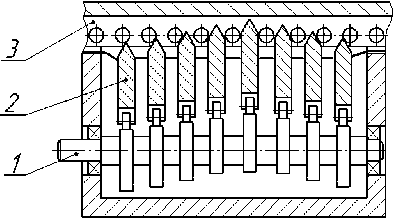
Рис. 2. Схема взаимодействия в ВРП кинематических элементов:
1 – вал кулачковый; 2 – толкатель с клиньями, перемещающийся в направляющих корпуса; 3 – рейка с вращающимися роликами (цевками)
Приведенный момент инерции агрегата определим по зависимости
Z
J пр ( q ) = J д + J к.в + m p V 2.р ■ 10 - 6 + m т ■ 10 - 6 У V 2.т , (2) k = 1
где J д , J к . в – моменты инерции ротора двигателя и кулачкового вала; m p , m т – массы рабочего органа и толкателя; V с . р, V с . т – аналоги скорости рейки с рабочим органом и скорости толкателя, мм/рад.
При анализе динамики ВРП следует учитывать две ее особенности.
Первая особенность заключается в симметричности значений аналогов скорости толкателя на участках удаления и приближения за один оборот кулачкового вала (рис. 3).
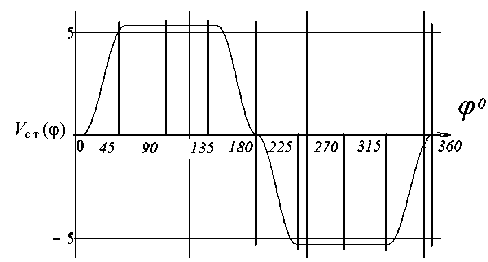
Рис. 3. Аналог скорости толкателя
В соответствии с этой особенностью, а также учитывая возведение в квадрат аналога скорости V с . т в зависимости (2), последнее слагаемое можно записать в виде укороченной суммы
Z/2
J пр.т = 2 m т ⋅ 10 - 6 ∑ V с 2 .т . (3) k = 1
Второй особенностью ВРП является циклическое изменение инерционных характеристик механизма, связанное со входом в зацепление очередного толкателя. Аналоги скорости соседних зацепляющихся толкателей сдвинуты по фазе. На рис. 3 утолщенными линиями показаны начальные положения аналогов скоростей толкателей, сдвинутых по фазе относительно первого толкателя, находящегося в начальном положении. Это позволяет при расчете приведенного момента инерции толкателей по зависимости (3) рассматривать значения аналогов их скоростей лишь на угловом участке поворота кулачкового вала ϕ p = 2 π / Z , т. е. до момента входа в зацепление очередного толкателя. В связи с этим привод с ВРП можно рассматривать как передаточный механизм, в котором используется мультипликатор с передаточным отношением i = Z /1 : за один оборот вала электродвигателя рабочий вал с кулачковым механизмом как бы вращается в Z раз быстрее. При этом приведенный момент инерции рейки с рабочим органом является величиной постоянной, так как рейка движется с постоянной скоростью, взаимодействуя с толкателями с коэффициентом перекрытия εαβ = 2,33 . Аналог скорости рейки V с . р связан с аналогом скорости толкателя V с . т на линейном участке его движения зависимостью
V с.р = V с.т ⋅ tg( α p) , (4)
где α p – угол клина на толкателе. Для ВРП приве- .
денный момент активных сил сопротивления T c ( q , q ) в зависимости (1) также следует рассматривать как величину постоянную.
Рассмотрим пример расчета неравномерности движения агрегата с ВРП, у которого число толкателей Z = 8, шаг роликов рейки Pр = 20 мм. ВРП обеспечивает тяговое усилие 1 300 Н, скорость перемещения рейки при номинальной частоте вращения ротора электродвигателя nн = 1 000 мин–1 – 0,33 м/с. Масса перемещаемого рабочего органа mр = 100 кг. Привод- ной электродвигатель – ДК1-5,2-1ХХ-АТ с параметрами: мощность W = 0,54 кВт, напряжение U = 110 В, ток при номинальном режиме Jн = 6,5 A, ток холостого хода Jx = 0,8A, сопротивление обмоток якоря R = 2,1 Ом, момент инерции ротора Jд = 4,16E – 3 кгм2, номинальный крутящий момент Тн = 5,2 Нм. Конструктивные параметры ВРП: полный ход толкателей hт = 12,06 мм, ход толкателей при взаимодействии с роликами рейки (активный ход) ha = 8,32 мм, диаметр роликов dр = 5,5 мм, масса толкателя mт = 0,093 кг, момент инерции кулачкового вала Jк.в =1, 6⋅10-4 кгм2.
Расчетные значения аналогов скоростей толкателей для десяти положений на участке поворота кулачкового вала ф расч = 2 п / Z = 45 ° приведены в табл. 1.
Значения приведенного момента инерции толкателей, рассчитанные по выражению (3), приведены в табл. 2
Значение приведенного момента инерции рабочего органа с рейкой, кгм 2 :
J пр.р ( q ) = m p V с 2 .р ⋅ 10 - 6 = 0,001013.
Суммарный приведенный момент инерции привода машинного агрегата с ВРП представим в виде ряда Фурье, принимая за условный период время поворота кулачкового вала на угол ϕ p асч:
∑ 10 ≈ 2π n
J пр ( ), (5)
n = 1 10
≈ где J0 – постоянная составляющая; Jпр – переменная составляющая, определенная как сумма двух гармоник (Jic – гармоника по косинусу; Jis – гармоника по синусу), вычисленных по формулам
110 ≈ 2 π n π n
J 1 c = ∑ J пр()cos();
5n=1
110 ≈ 2 π n π n
J 1 s = ∑ J пр()sin();
5n=1
110 ≈ 2 π n 2
J 2 c = ∑ J пр()cos();
5n=1
110 ≈ 2 π n 2
J 2 s = ∑ J пр()sin().
5n=1
Построим при помощи MathCad графики рассчи-≈ танных Jпр и ∂Jпр(q) /∂q (рис. 4).
Таблица 1
Аналоги скоростей толкателей, мм/рад
|
№ толкателя |
Угловые положения толкателей |
|||||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
|
1 |
0 |
0 |
0,145 |
0,564 |
1,212 |
2,018 |
2,892 |
3,739 |
4,466 |
4,992 |
|
2 |
5,261 |
5,297 |
5,297 |
5,297 |
5,297 |
5,297 |
5,297 |
5,297 |
5,297 |
5,297 |
|
3 |
5,297 |
5,297 |
5,297 |
5,297 |
5,297 |
5,297 |
5,297 |
5,297 |
5,297 |
5,297 |
|
4 |
5,297 |
5,297 |
5,234 |
4,871 |
4,212 |
3,345 |
2,385 |
1,460 |
0,182 |
0 |
|
Суммарные приведенные моменты инерции толкателей, кгм2 |
Таблица 2 |
|||||||
|
J пр.т /10 6 |
15,5 |
15,6 15,5 |
14,9 |
13,8 |
13,1 |
13,0 13,4 |
14,2 |
15,0 |
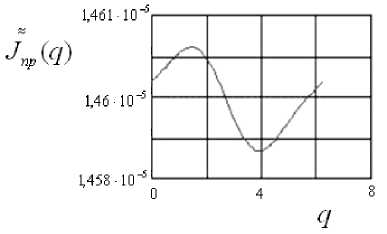
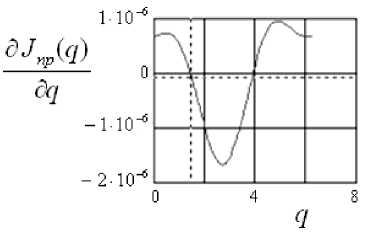
Рис. 4. Характеристики приведенного момента инерции
Уравнение движения машинного агрегата, учитывая постоянство приведенного момента активных сил сопротивления T c ( q , q ) в зависимости (1), запишем в форме
.. ■ = .. 0,5 5 J ( q ) . ,
J о V- T ( q ) - T = - J пр ( q ) ■ q ---пр ( q ) 2 , (6)
dq щающего момента L(tocр, t) с использованием коэф-^
фициентов разложения в ряд Фурье J пр ( q ):
L (и t ) = ^ [ Ll cos( l и t + 1 a l ], (8)
i = 1
где l - порядок гармоники; Lt = LL+LFs, где v — динамическая ошибка углового положения ■ ротора; Tд(q) – движущий момент, Нм.
Представим движущий момент в виде статической характеристики, рассчитанной по данным двигателя: ■ к
Т д ( q ) = -1 ( U - K 2 ■ 30 ■to / п ) =
R (7)
= 40,875 - 0,3405 ■to
Т = F V -tefa ) + F V = c тяг ' с.т g Vap тр ' с.т
= 5,297 ■ 10 - 3 (1300 ■ tg( a p) + 175) = 5,06,
L lc = - 0,5 ■ Jl5l U2 , L l5 =- 0,5 ■ JJ U2 ; Jc , J - коэффициенты разложения в ряд Фурье функции J пр ( q ); u = to cZ . Угол a l определяется с учетом знака
sin a l =- L5- и cos a l =- L^- . Поскольку значения
производной
d J пр ( q ) d q
на три порядка меньше значе-
ния коэффициентов разложения в ряд Фурье функции J пр ( q ) (рис. 4), ее учитывать не будем.
где T c – приведенный момент сил сопротивления на рабочем органе и ведущих толкателях, Нм; F тяг – тяговое усилие на рейке, H; F с.т – аналог скорости толкателя; F^ = 175 Н - сила трения на ведущих
Динамическую ошибку скорости в первом приближении определим по выражению [4]
толкателях; K 1 = 0,78, K 2 = 0,096 - конструктивные параметры; коэффициент при угловой скорости to представляет собой крутизну 5 = 0,340 5 статической
.
v = -Z
l = 1
[ L i sin( l u t + a i +5 1 ]
7 J 2 1 2 U 2 + 5 2
характеристики двигателя.
Из уравнения (6), полагая в нулевом приближении его правую часть равной нулю, а также что V = 0
и знаки момента сил сопротивления и движущего мо-
мента противоположны, определим среднюю скорость вращения ротора двигателя, с –1 :
s где 5 1 = arctg( ) + п .
J 0 l υ
Рассчитанная ошибка скорости вала электродвигателя, а также рабочего органа ВРП представлена графиком на рис. 5.
По максимальному и минимальному значениям ошибки скорости определен коэффициент неравномерности движения рабочего органа ВРП:
to cр
(40,875 - 5,06)
0, 4305
= 105,18.
V max -V min
to c
0,052 + 0,045
105, 2
» 0,001.
Динамическую ошибку | V |<< tocр определим из (6), представив его правую часть в виде возму-
Итак, предложена методика расчетной оценки неравномерности движения выходного звена волновой реечной передачи – рейки с рабочим органом – на основе метода расчета динамики машинного агрегата с жесткими звеньями, разработанного М. З. Ко-ловским.
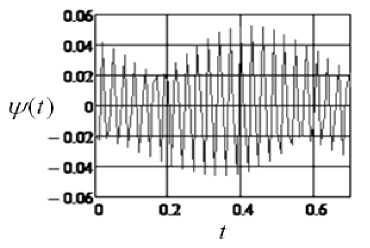
Рис. 5. Динамическая ошибка скорости выходного звена ВРП
В связи с линейной характеристикой скорости рабочего органа в возмущающем воздействии системы привода ВРП приведенный момент активных сил со .
противления T c ( q , q ) в зависимости (1) следует рассматривать как величину постоянную.
В приведенном значении момента инерции передачи следует учитывать его изменение в связи с цикличностью входа в зацепление очередного толкателя, а также частоту возмущающего воздействия от переменного момента инерции – в Z раз превышающую частоту вращения кулачкового вала, где Z – количество кулачковых механизмов в передаче.
