К разработке обобщенной математической модели электромеханического перфоратора с ударно-поворотным механизмом

Автор: Абидов А.О., Исманов О.М., Турдубаева Ж.А., Токтобаева Г.Т.
Журнал: Бюллетень науки и практики @bulletennauki
Рубрика: Технические науки
Статья в выпуске: 5 т.12, 2026 года.
Бесплатный доступ
Рассматривается разработка обобщённой математической модели электромеханического перфоратора с ударно-поворотным механизмом. Объектом исследования является электромеханический перфоратор ударно–поворотного действия. Цель работы - разработка обобщенной математической модели электромеханического перфоратора ударно–поворотного действия. На основе структурной схемы и математических моделей отдельных элементов и механизмов с использованием методики упрощения расчетной схемы разработана обобщенная математическая модель электромеханического перфоратора ударно-поворотного действия. Также представлена структурная схема перфоратора с ударно-поворотным механизмом состоящего из универсального коллекторного двигателя, редуктора, поворотного механизма, ударного механизма и инструмента. Результаты моделирования могут быть использованы для оптимизации конструкции, прогнозирования поведения системы и разработки систем управления.
Электромеханический перфоратор, математическая модель, универсальный коллекторный двигатель, ударный механизм, поворотный механизм, редуктор, кривошип, модель, коромысло
Короткий адрес: https://sciup.org/14135647
IDR: 14135647 | УДК: 621.01 | DOI: 10.33619/2414-2948/126/32
Towards the Development of a Generalized Mathematical Model of an Electromechanical Perforator with an Impact-Rotary Mechanism
This paper discusses the development of a generalized mathematical model of an electromechanical perforator with a rotary-impact mechanism. The object of the study is an electromechanical perforator with a rotary-impact action. The purpose of the work is to develop a generalized mathematical model of an electromechanical perforator with a rotary-impact action. Based on the structural diagram and mathematical models of individual elements and mechanisms using the method of simplifying the calculation scheme, a generalized mathematical model of an electromechanical rotary hammer drill has been developed. Also presented is a structural diagram of a hammer drill with a rotary impact mechanism consisting of a universal collector motor, a gearbox, a rotary mechanism, an impact mechanism and a tool. The results of the modeling can be used to optimize the design, predict the behavior of the system and develop control systems.
Текст научной статьи К разработке обобщенной математической модели электромеханического перфоратора с ударно-поворотным механизмом
Бюллетень науки и практики / Bulletin of Science and Practice
УДК 621.01
Исследования динамики машин, как правило, проводятся на основе математического моделирования и экспериментальных исследований. Задачей исследования динамики машин является оценка динамической загруженности отдельных элементов (звеньев) и механизмов, входящих в состав машины, что является следствием неравномерности их вращения и наличия крутильных колебаний. Вопросы неравномерности вращения и наличия крутильных колебаний особенно актуальны для ударных машин, где присутствуют кратковременные экстремальные нагрузки, связанные с процессом удара.
Механизмы и звенья рассматриваемого в данной работе перфоратора с ударноповоротным механизмом также подвержены динамическим нагрузкам, что делает необходимым проведение исследований его динамики. Для осуществления исследования динамики на основе математического моделирования необходима разработка обобщенной математической модели перфоратора с ударно-поворотным механизмом. В процессе работы перфоратора под действием нагрузок возникает упругая деформация основных элементов. При передаче нагрузок валы и опоры элементов электромеханического перфоратора подвергаются деформациям, которые, в свою очередь, приводят к дополнительным перемещениям зацепляющихся колес и других кинематических пар, что влияет на работу этих звеньев. Определение и изучение изменения режима движения этих звеньев важно, так как оно влияет на кинематические параметры элементов, что, в конечном счете, отражается на технических характеристиках перфоратора в целом. Одним из методов оценки влияния нагрузок на кинематические параметры является анализ движения механизмов на основе решения математической модели. Для составления математической модели электромеханического перфоратора с ударно-поворотным механизмом сначала рассмотрим его структурную схему. В конструкции перфоратора для эффективного разрушения обрабатываемой среды и бурения шпура используется ударное воздействие.
На Рисунке 1 представлена структурная схема перфоратора с ударно-поворотным механизмом. Он состоит из универсального коллекторного двигателя (УКД) 1, редуктора 2, предназначенного для передачи движения от вала двигателя к поворотному 3 и ударному 4 механизмам ударно-поворотной системы 5, которая обеспечивает одновременно ударное воздействие на обрабатываемую среду посредством инструмента 6 и поворот его на определенный угол, соответствующий параметрам поворотного механизма, тем самым обеспечивая бурение обрабатываемой среды.
Составление обобщенной математической модели перфоратора с ударно-поворотным механизмом требует разработки математических моделей его составных частей: универсального коллекторного двигателя, ударного и поворотного механизмов. Затем разработанные математические модели составных частей соединяются согласно структурной схеме перфоратора, упрощаются по известной методике и формируется обобщенная математическая модель перфоратора [6-8].
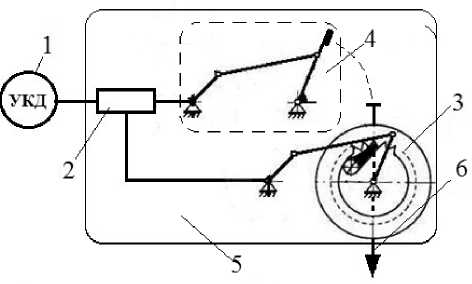
Рисунок 1. Структурная схема перфоратора ударно-поворотного действия: 1 - универсальный коллекторный двигатель; 2 - редуктор; 3 - поворотный механизм;4 - ударный механизм; 5 - ударноповоротная система; 6 - инструмент
Однофазные коллекторные электродвигатели, являющиеся приводом рассматриваемого перфоратора, характеризуются высокой удельной мощностью на единицу массы в связи с высокой частотой вращения. Преимуществом этих электродвигателей является возможность выдерживать динамические нагрузки, поэтому на практике их используют в качестве привода в ручных перфораторах ударного действия. На Рисунке 2 представлена модель универсального коллекторного двигателя.
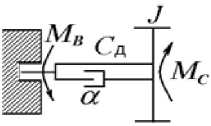
Рисунок 2. Модель универсального коллекторного двигателя: МВ — момент движущих сил; МС — момент сопротивления механизма; J — момент инерции якоря электродвигателя; Сд — жесткость вала электродвигателя; α — коэффициент демпфирования
Математическая модель универсального коллекторного электродвигателя с последовательным возбуждением с учетом механических, статических и динамических характеристик, электромагнитных процессов, протекающих в машине, первоначально представляется в виде двух уравнений, описывающих движение якоря в зонах насыщенного и ненасыщенного магнитных полей [1, 6, 8]:
J^Ф = C m ■k■i2-M c
U = Cе■k■i■ф + i■R + L■

л f где: ϕ,ϕ — соответственно угловая скорость и ускорение якоря электродвигателя; k — постоянный коэффициент; J — момент инерции якоря электродвигателя; I — ток в цепи якоря; МС- момент сопротивления механизма; U — напряжение в цепи якоря; R — сопротивления в цепи якоря; L — индуктивность обмотки возбуждения; Cm, Ce — конструктивные коэффициенты электродвигателя.
На основе совместного решения вышеуказанных уравнений составляется математическая модель универсального коллекторного двигателя, которая записывается следующим уравнением [2, 3, 6-8]:
J ф = [k1 • i1-a1 -U-(j$ + МС )a1 - k2 ■ i2-a1 -ф-( ф + МС )a2 - (2) -k3 ■ i1 a3 ■ R • (] ф + мс) - ^j, где: ф , ф , ф — соответственно угловая скорость, ускорение и рывок якоря электродвигателя; k1, k2, k3 — постоянные коэффициенты; J — момент инерции якоря электродвигателя; I — ток в цепи якоря; МС — момент сопротивления механизма; U — напряжение в цепи якоря; R — сопротивления в цепи якоря; a1, a2, a3 — число пар параллельных ветвей. Данная математическая модель УКД была использована при исследовании динамических характеристик электромеханического перфоратора с ударновращательным режимом работы и показала результаты, близкие к действительности. В связи с этим в обобщенной математической модели перфоратора с ударно-поворотным механизмом используется представленная модель [1, 6, 7].
Следующей составной частью перфоратора с ударно-поворотным механизмом является ударный механизм переменной структуры. Его математическая модель представляется как приведенный к кривошипу момент сопротивления, создаваемый коромыслом ударного механизма (рисунок 3) [2, 3, 6-8].
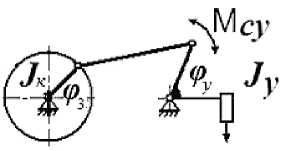
Рисунок 3. Модель ударного механизма: Jк - момент инерции кривошипа ударного механизма; φ3 - угол перемещения кривошипа; Мсу - момент сопротивления ударного механизма; φу - угол перемещения ударного механизма; JУ - момент инерции ударного механизма
Момент, создаваемый коромыслом, рассматривается как [6-8]:
МСУ =/у ■фу, Н-м, где: J-у, фу — соответственно, момент инерции и угловое ускорение коромысла ударного механизма. Угловое ускорение коромысла ударного механизма можно выразить как [2-4]:
фу = Фз^ U43 + фз2 ■ Щз, с-2, где: ф3, ф3 — соответственно, угловая скорость и угловое ускорение кривошипа; и43,й43 — соответственно аналог угловой скорости и углового ускорения коромысла ударного механизма. Тогда, приведенный к кривошипу момент сопротивления, создаваемый со стороны коромысла ударного механизма равен [2, 3]:
М С У =^^ 1 у ■ и 43 (Ф 3 • и 43 + ф 3 • ^43 ), Н^м.
Допустим, что кривошип ударного механизма будет вращаться равномерно. При равномерном вращении кривошипа, т.е. при ф3 = 0 момент сопротивления имеет вид [2, 3, 58]:
Мс у =] у ’« 43 -032 -« 43 , Н-м.
Уравнение (6) и есть математическая модель ударного механизма. В данном уравнении момент инерции коромысла ударного механизма — величина постоянная. Если допустить, что угловая скорость кривошипа также является величиной постоянной, тогда момент сопротивления ударного механизма станет функцией, зависящей от u_43, u̇ _43, т.е. Мс = f(u_43, u̇ _43) [2-8].
Математическая модель поворотного механизма представляется как приведенный к кривошипу момент сопротивления, создаваемый со стороны коромысла поворотного механизма (Рисунок 4) [2-8].
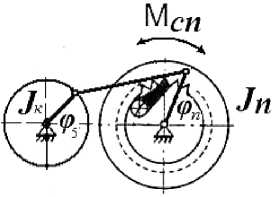
Рисунок 4. Модель поворотного механизма: Jк - момент инерции кривошипа поворотного механизма; φ5 - угол перемещения кривошипа; Мсп - момент сопротивления поворотного механизма; φп - угол перемещения поворотного механизма; Jп - момент инерции поворотного механизма
Момент, создаваемый коромыслом поворотного механизма рассматривается как [6-8]:
М с п =^] п ’Ф п + ^ Р , Н-м, (7)
где: J_n, ϕ ̈ n — соответственно, момент инерции и угловое ускорение коромысла поворотного механизма; M_ТР — момент трения инструмента об обрабатываемую среду; u — передаточное отношение поворотного механизма. Угловое ускорение коромысла поворотного механизма можно выразить как [2-4]:
Ф п =$ 5 ' « 65 + 0 52 - « 65 , с-2, (8)
где: ф5, ф5- соответственно, угловая скорость и угловое ускорение кривошипа; и65,й65- соответственно, аналог угловой скорости и углового ускорения коромысла поворотного механизма. Тогда, приведенный к кривошипу момент сопротивления, создаваемый со стороны коромысла поворотного механизма равен:
М С П =^^ /п (ф 5 ’« 65 +ф 5 ’« 65 )+“, Н'м. (9)
При допущении, что кривошип вращается равномерно, т.е. при ф3 = 0 момент сопротивления имеет вид:
^ С П =^^/ п ■ ф 5 ’« 65 + “^Р, Н’м. (10)
Полученное уравнение (10) характеризует математическую модель поворотного механизма, где момент инерции коромысла и угловая скорость кривошипа – величины постоянные. Вышеперечисленные элементы и механизмы соединены между собой передаточными механизмами, массо-инерционные параметры которых также учитываются в обобщенной математической модели электромеханического перфоратора. Учет всех промежуточных элементов в обобщенной модели делает создаваемую модель громоздкой, что затрудняет вычисление.
В связи с этим, используя методику парциальных систем, упрощаем расчетную схему и получаем окончательную обобщенную математическую модель электромеханического перфоратора с ударно-поворотным механизмом [7, 8].
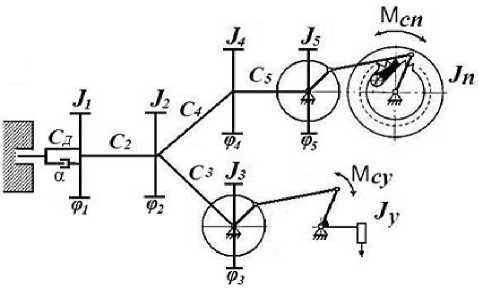
Рисунок 5. Обобщенная модель электромеханического перфоратора с ударно-поворотным механизмом
J1, J2, J3, J4, J5, Jу, Jп — моменты инерций, соответственно, вала якоря двигателя, вал-шестерни, кривошипа ударного механизма, зубчатого колеса, кривошипа поворотного механизма, ударного механизма и поворотного механизма; Мсу, Мсп — моменты сопротивления, соответственно, ударного и поворотного механизмов; Сд, С3, С5 — жесткости, соответственно, вала двигателя, зубчатых зацеплений и шлицевого соединения колеса с промежуточным валом; С2, С4 — суммарные жесткость, соответственно, зубчатых зацеплений и шлицевого соединения колеса с промежуточным валом, зубчатых зацеплений; α — коэффициент демпфирования. Считая характерными элементами вал двигателя, элементы редуктора и инструмент, приходим к модели перфоратора в виде пятимассовой системы с эквивалентными упругими связями между массами. Уравнения движения элементов перфоратора по данной расчетной схеме (Рисунок 5) записываются следующей системой дифференциальных уравнений:
' Ji$i = k i ■ U ■ ( i ■ ф 1 + M c )a1 — k 2 ■ ф 1 ■ ( i ■ ф 1 + Mc)a2 — к з ■ R ■ ( i ■ ф 1 + Mc)a3 - Mc-, (11)
h$ 2 = С 2 (ф 1 — ф 2 ) — С 3 (ф 2 — Ф 3 ) — С 4 (ф 2 — Ф 4 );
' ] зф3 = С 3 (ф 2 — ф 3 ) — М СУ ;
КФ 4 = С4(ф 2 — Ф 4 ) — С5(ф 4 — ф5)
ф5ф5 = С5(ф4 — Фв) — МСП, где Ф1ф5— угловое перемещение элементов перфоратора; ^1-ф5— угловая скорость элементов перфоратора; ^-фв— угловое ускорение отдельных масс перфоратора; МСУ — момент сопротивления, действующий со стороны ударного механизма; Мсп — момент сопротивления, действующий со стороны поворотного механизма. Данная система дифференциальных уравнений решается численным методом Рунге-Кутта с использованием прикладной программы.
Заключение
Отмечены актуальность и цели исследования динамики электромеханического перфоратора с ударно-поворотным механизмом. Для разработки обобщенной математической модели перфоратора использованы модели его элементов и исполнительных механизмов. Работа ударных и поворотных механизмов учтена через моменты сопротивления, создаваемые данными узлами. Расчетная схема электромеханического перфоратора упрощена с использованием метода парциальных систем; составлена окончательная обобщенная математическая модель перфоратора с ударно-поворотным механизмом, которая решается численным методом Рунге-Кутты.
