К вопросу автоматического управления приводом глубинного штангового насоса

Автор: Садов Виктор Борисович
Статья в выпуске: 3 т.13, 2013 года.
Бесплатный доступ
Рассматривается задача автоматического управления приводом глубинного штангового насоса. Рассмотрены параметры нефтедобычи, характеризующие ее результаты и ее процесс. Приведены основные формулы моделирования системы «скважина глубинный штанговый насос», отражающие процесс поступления жидкости в скважину в ходе добычи нефти глубинными штанговыми насосами. Рассмотрены результаты моделирования. Приведена структура системы нефтедобычи, состоящая из медленной и быстрой динамических составляющих. Выделены самоорганизующиеся параметры нефтедобычи и составляющие управления и показаны необходимые ограничения при управлении. Сформулирован и на основании обзора существующих подходов обоснован экономический критерий управления нефтедобычей. Дана организационно-информационная структура системы управления нефтедобычей из малодебитных скважин, выделены основные функции каждой составляющей этой структуры и показаны все необходимые организационные и информационные связи.
Управление, моделирование, нефтедобыча
Короткий адрес: https://sciup.org/147154916
IDR: 147154916 | УДК: 622.276:
To the question of automatic control of the drive sucker rod pump
The problem of automatic control by a drive sucker rod pump is considered. The parameters of oil extracting describing its results and process are considered. Basic formulas of system simulation “a chink sucker rod pump”, reflecting the liquid giving process in a chink are resulted during the oil recovery of sucker rod pumps. Simulation results are considered. The system structure of the oil extracting, consisting of slow and fast dynamic components is resulted. Self-organizing parameters of oil extracting and component control are allocated and necessary restrictions are shown at the control. The economic criterion of control is formulated and proved on the basis of the existing approaches review of oil extracting. The organizational information structure of the control system by oil extracting from low-output of oil well chinks is given, the basic functions of each structure component are allocated and all necessary organizational and information communications are shown.
Текст научной статьи К вопросу автоматического управления приводом глубинного штангового насоса
С точки зрения управления приводом глубинного штангового насоса, существуют следующие величины, характеризующие результаты нефтедобычи и ее процесс:
-
1. Дебит скважины q .
-
2. Давления в устьевой и затрубной полостях P у, P з .
-
3. Количество двойных ходов механизма в минуту n .
-
4. Закон движения полированного штока U ( t ) .
-
5. Усилия на полированном штоке мгновенные P , максимальные и минимальные, средние по фазам движения.
-
6. Уровень жидкости в скважине H 1 .
Также мы можем анализировать данные по усилиям на полированном штоке на периоде движения полированного штока (динамограмму).
В качестве управляющих воздействий можно использовать 2, 3, 4. Основная величина, характеризующая результат нефтедобычи, – дебит – есть величина либо расчетная, либо получаемая на основе информации с датчиков, находящихся вне контура управления приводом глубинного штангового насоса.
Результаты моделирования, приведенные в [1], показали, что прямое управление дебитом с изменением только количества двойных ходов в минуту невозможно по причине отсутствия у графика дебита четко выраженного экстремума. В этом случае для синтеза управления нам необходимо проанализировать систему «скважина – глубинный насос».
Моделирование системы «скважина – глубинный насос»
Рассмотрим систему, приведенную на рис. 1. Здесь h Д ( t ) – динамический уровень жидкости в скважине; H – глубина погружения насоса, H НКТ – длина напорно-компрессорной трубы (НКТ), H П – глубина до просечек в обсадной трубе, P 0 – пластовое давление.
Расход жидкости можно вычислить по формуле Пуазейля q=πρP1-P2R4, (1)
где ( P1 - P 2 ) - разность давлений; l - длина трубы; р - плотность жидкости; R - радиус трубы;
П - гидродинамическая вязкость жидкости.
Можно переписать эту формулу в виде q = cAP, (2)
где A P - разность давлений на входе и выходе трубы; c – коэффициент.
Выражение для притока жидкости из нефтяного пласта в полость обсадной трубы будет иметь вид q п = ci (Po -р gH п +р ghд (t)). (3)
Выражение для притока жидкости к насосу (текущая добыча) записывается как qН = 2c2 (рgHНКТ -рghД (t)) , (4)
причем для насоса длина трубы, вычисляемая согласно (1), имеет вид l = HНКТ - H. В (4) коэффициент 1/2 появился из-за того, что жидкость в на- сос поступает только при ходе плунжера насоса вверх, а ход вверх равен примерно 1/2 от общего времени движения при одном двойном ходе.
Запишем уравнение для динамического уровня dh^ = qHZqn ,(5)
dtF
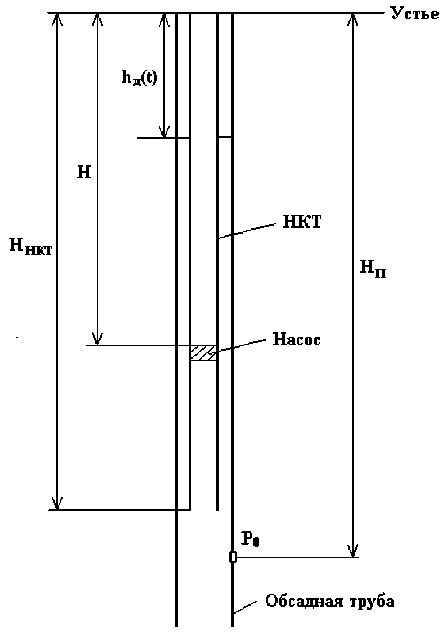
Рис. 1. Система «скважина–глубинный насос»
где F 0 – площадь сечения между обсадной трубой и НКТ.
Приравнивание (5) к нулю дает нам уравнение равновесного состояния при постоянной добыче qн = qп .
Подставляя в это выражение (3) и (4), имеем ci (P0 - рgHП + рghД (t )) = 2 c2 (рgHНКТ - рghД ( t )) .
Отсюда формула для установившегося уровня h ДУ имеет вид
-
— c 2 р gH нкт + с 1 р gH П - c i P 0
hДУ = 2---------7----.(8)
р g I c i + 2 c 2 I
При просчете (8) необходимо учесть, что величина q Н по (4) имеет ограничения сверху и снизу, определяемые характеристиками насоса и количеством двойных ходов.
Суточная теоретическая подача установки вычисляется как
Q = 1440 S пл F n„ n n , (9)
где S пл – величина хода плунжера насоса; F пл – площадь плунжера насоса; n – количество двойных ходов в минуту; n - коэффициент подачи (от 0 до 1).
Вычисленная величина qН по (4) не должна быть больше, чем полученная по (9). Если же это не так, то требуется коррекция hДУ исходя из значений qП , т. е. hДУ может быть вычисле- на как hДУ =
Q + с 1 р gH П - c i P 0 р gc i
Было произведено моделирование по приведенным формулам. Результаты моделирования процесса добычи с целью выявления закономерностей изменения уровня и текущего дебита добычи в зависимости от изменения количества двойных ходов приведены на рис. 2.
Результаты изменения динамического уровня во времени приведены на рис. 3.
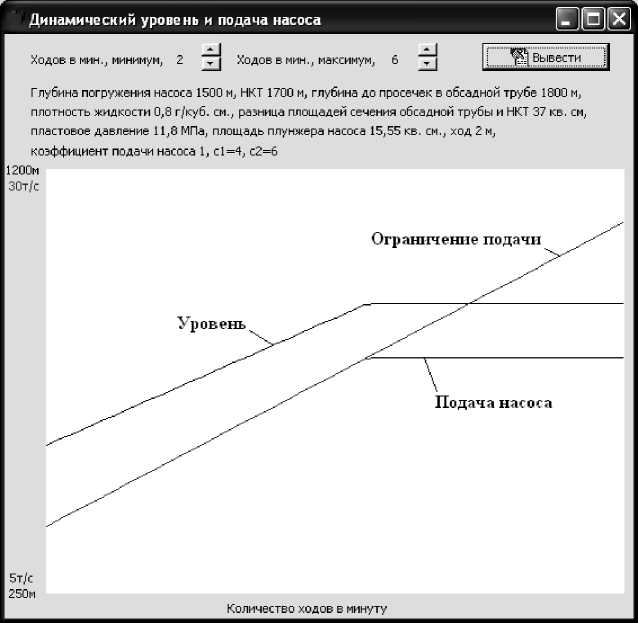
Рис. 2. Динамический уровень и подача насоса
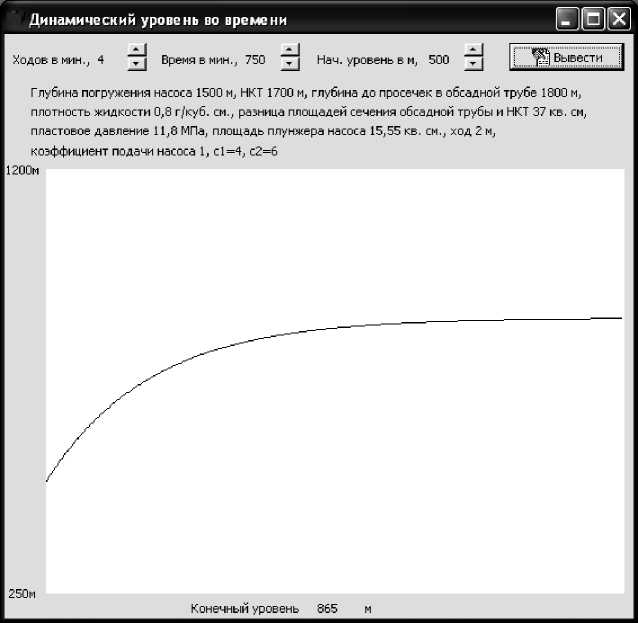
Рис. 3. Изменение динамического уровня во времени
Видно, что график уровня жидкости в скважине в зависимости от количества двойных ходов (рис. 2) практически повторяет график подачи насоса. Но следует отметить, что коэффициенты c 1 и c 2 из (3) и (4) есть величины нестационарные, поэтому вести управление по величине динамического уровня нецелесообразно, так как этот показатель позволяет только косвенно оценить уровень добычи нефти. В то же время величина динамического уровня ограничивается сверху и снизу технологическими параметрами глубинного оборудования. Поэтому при управлении необходимо учитывать эти ограничения. Из рис. 3 видно, что процессы изменения динамического уровня очень медленные. В нашем случае изменение уровня от 500 до 865 м произошло за время, примерно равное 10 часам. В то же время при данном количестве двойных ходов измерение текущего дебита возможно через 15 секунд, а управление изменением количества двойных ходов можно вести непрерывно практически с любым шагом по времени.
Синтез структуры системы управления
Система «скважина– глубинный насос» является самоорганизующейся, так как ее параметры автоматически выставляются на новый уровень при изменении параметров движения полированного штока. Исходя из подхода синергетического управления [2], можно, используя принцип подчинения, представить нашу систему управления в виде иерархической системы, состоящей из совокупности динамических подсистем. В математическом плане принцип подчинения базируется на методе адиабатического приближения или идее разделения исходной системы на медленные и быстрые подсистемы. В данном случае наверху будет медленная система стабилизации уровня жидкости в скважине, а внизу – достаточно быстрая система регулирования дебита скважины. В качестве параметра порядка можно принять закон движения полированного штока. Причем в этом случае медленная система подстраивается под быструю, то есть изменение, например, количества двойных ходов приводит к медленной стабилизации уровня жидкости в скважине на определенном уровне. То есть для регулирования системы можно менять только количество двойных ходов, при этом необходимо контролировать давления для поддержания их в определенных пределах и уровень жидкости в скважине.
Структура системы регулирования представлена на рис. 4.
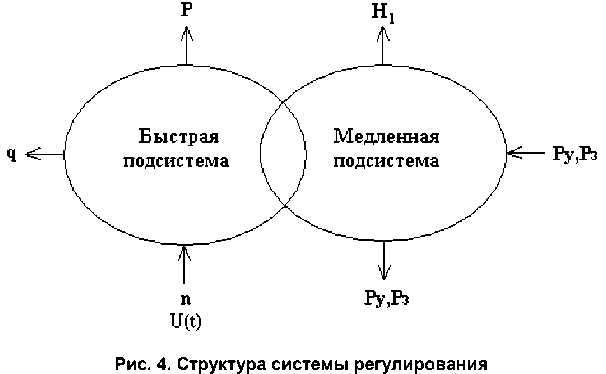
При реализации данной системы необходимо учесть ограничения на уровень жидкости в скважине H 1min < H 1 < H 1max , ограничения на давления в трубных полостях P зmin < P з < P зmax , P уmin < P у < P уmax . Причем регулировки P у, P з выходят из цепи регулирования, так как производятся вручную, и могут быть рассмотрены как внешние возмущения в системе. При выходе уровня жидкости в скважине H 1 за установленные границы можно поменять уставки по минимальному и максимальному значениям количества двойных ходов n min и n max без изменения логики управления.
Формирование критерия управления
В известных системах управления, например, фирмы Lufkin [3], изменение количества двойных ходов привода привязано к изменению параметров нефтедобычи, в частности, к величине «хвоста» расчетной плунжерной динамограммы с явными признаками недостатка притока жидкости в скважину. В контроллере фирмы Lufkin Automation этот «хвост» настраивается в пределах 5–10 %. Результаты исследования системы управления фирмы Lufkin [3] показывают, что при применении контроллера Lufkin Controller Well Manager RPC в среднем снижается на 20 % потребляемая установкой мощность, на 25 % уменьшаются затраты на обслуживание скважины и установки, и только на 1–4 % увеличивается добыча и снижаются простои оборудования. К недостаткам данного способа формирования критерия управления относится его «непрозрачность» с точки зрения основного результата автоматизации нефтедобычи – снижения расходов добычи одной тонны нефти.
Для регулирования целесообразно использовать комплексный критерий, включающий в себя экономические составляющие нефтедобычи. Для рассмотрения можно включить только прямые производственные составляющие, то есть те составляющие, на которые влияет дебит скважины:
– Расходы на электроэнергию в ходе добычи. В структуре издержек затраты на энергоресурсы составляют 10–15 % [4, с. 229]. При этом наблюдается тенденция к ее росту, например, в более поздней литературе [5] приведена цифра 20–25 %. В нашем случае ее можно оценить как площадь динамограммы за единицу времени, умноженную на время двойного хода. В [6] приведены примеры увеличения числа ходов на двух скважинах. При этом на первой при увеличении числа двойных ходов с 5,9 до 6,5 (увеличение на 10,2 %) потребление электроэнергии увеличилось с 6,6 до 9 кВт (увеличение на 36,4 %), а дебит увеличился с 14 до 16 м3/сут (увеличение на 14,3 %). На второй при увеличении числа двойных ходов с 4,8 до 6,4 (увеличение на 33,3 %) потребление электроэнергии увеличилось с 6,5 до 10,5 кВт (увеличение на 61 %), а дебит увеличился с 18,2 до 23,4 м3/сут (увеличение на 28,6 %). Это говорит о том, что потребление электроэнергии может увеличиваться большими темпами, чем количество двойных ходов. Исходя из этого, примем закон изменения энергопотребления от количества двойных ходов с линейной и квадратичными составляющими. Увеличение же количества двойных ходов приводит к пропорциональному (теоретически так же) увеличению дебита скважины. В комментарии к статье специалиста А. Клусова говорится о том, что при автоматизации надо реализовывать так же функцию снижения дебита для достижения меньшего энергопотребления и снижения затрат на ремонт скважины.
– Расходы на обслуживание глубинного оборудования (глубинного штангового насоса). Его износ пропорционален количеству двойных ходов в минуту, так как скорость перемещения плунжера глубинного насоса также пропорциональна количеству двойных ходов.
– Расходы на обслуживание привода глубинного штангового насоса. Они также пропорциональны количеству двойных ходов, так как его увеличение приводит к пропорциональному увеличению скорости движения полированного штока и всех механизмов привода и, как следствие, к их износу. Сумма расходов на обслуживание глубинного штангового насоса и его привода составляет до 65 % от расходов на добычу.
-
– Амортизационные расходы на скважину. Эта величина является условно постоянной, так как очень слабо зависит от величины дебита скважины. Сумма амортизационных расходов составляет до 10 % от расходов на добычу.
-
– Заработная плата производственных рабочих. Эта величина также слабо зависит от дебита скважины и составляет до 5 % от расходов на добычу.
В суммарный критерий, таким образом, включаются составляющие дебита, расходов на электроэнергию и расходов на обслуживание глубинного оборудования и привода штангового насоса:
G = q - k 1 ( n + а n 2 ) - к 2 n ,
где q - оценка величины текущего дебита в единицу времени; M = к1 ■ (n + а ■ n2) - расходы на электроэнергию в единицу времени; D = к2 ■ n - расходы на обслуживание глубинного оборудо- вания и привода штангового насоса в пересчете на единицу времени.
Постоянные величины к , к 2 , а можно получить на основе экспертных оценок. Они могут меняться в за в иси м ости от ц е н ы на нефть (цены добычи нефти), цены на элек троэ н е ргию , ц е н ы и стои м ост и обслу жи в а н ия гл уби нн ого обору д ов а н и я и н а с ос н ой у с та н ов к и .
Оп ти ма ль ны й ре жи м у п ра в ле н и я д ос ти гае тс я при максимуме этого критерия. При определе н и и оп ти ма ль ного к ол иче с тв а д в ой н ых ходов n необходимо учитывать ограничения типа n min < n < n max , та к к а к оп ред е л е нное значение может выходить за технологи че ск и е ра м к и к онкретной скважины.
В ход е у п ра в ле н и я н е об х од и мо также анализировать состояние скважин н ог о об ору д ов а н и я, н апри ме р, в к он трол ле ре си с те м ы управления [7]. Появление, например, че тк и х п ри зн ак ов не дос та тка п ри то к а жид к о сти в с к в ажи н у б у д е т г ов ори ть о не об хо д и мос ти у м еньшения количества дв ойн ы х ходов , та к к ак т а к ое е го значение может быть нерационально, то ес ть ограничения при р е а ли за ц и и ( 11) могу т н ак ла дыв аться как цеховыми технологами, так и экон оми че с к и ми к ри те р иями н е фте добычи и да же с ис те мой кон троля в к он тролле ре системы управления привода штангового насоса.
Общая структура системы управления нефтедобычей
М ожн о пре дложи ть с тру ктур у системы управления нефтедобычей, показан ну ю н а ри с . 5.
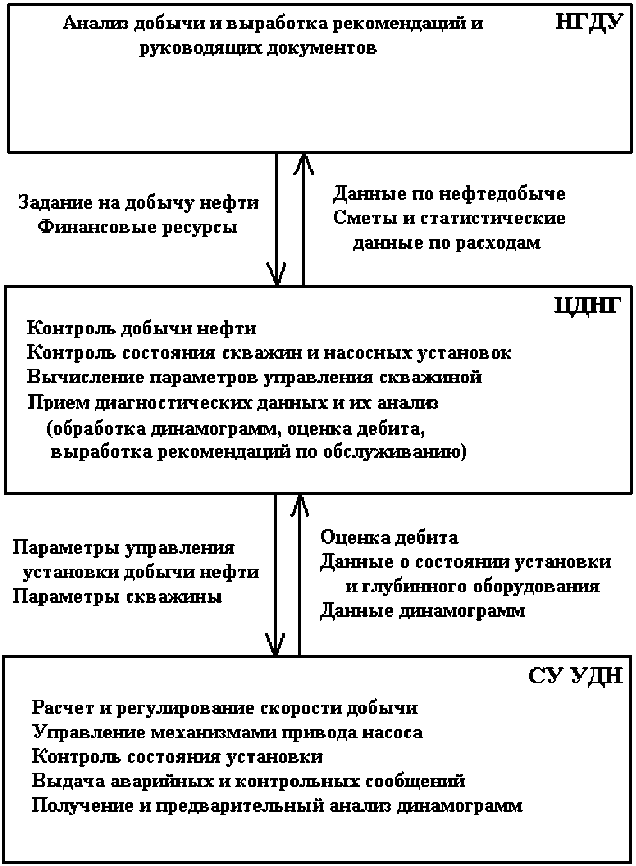
Рис. 5. Иерархическая структура системы управления нефтедобычей
Эта структура подразумевает наличие единой цеховой сети, с которой связаны все системы управления установок добычи нефти (СУ УДН). СУ УДН производит управление всеми механизмами привода насоса, контролирует рабочие параметры насоса и установки, производит съем или расчет динамограмм (ваттметграмм) и при запросах с цеховой сети передачу всех данных в цех. Также контроллер СУ УДН производит предварительную обработку динамограмм с целью диагностики глубинного оборудования и привода насоса и выдает эту информацию для обработки в цех. Окончательный вывод по дефектам делается в цеховых компьютерах после передачи им данных динамограмм. В цеховых компьютерах обработка динамограмм может производиться по различным методикам, и вывод по дефектам должен быть более точным, чем в контроллере СУ УДН. Такая структура позволяет оценить на месте дефекты оборудования и технологические параметры добычи и уменьшить расходы на обслуживание вследствие уменьшения количества выездов на скважину и увеличения срока службы глубинного оборудования и привода насоса.
Относительно существующих систем новыми в этой структуре являются данные, передаваемые с ЦДНГ по параметрам управления установками добычи нефти, и расчет и регулирование скорости добычи в СУ УДН, что позволяет использовать почти полностью автоматический режим добычи нефти.
Выводы
При формировании критерия автоматического управления скважиной необходимо учитывать как технические, так и экономические составляющие процесса нефтедобычи.
Данное исследование приводит к необходимости построения иерархической структуры всей системы нефтедобычи с выделением функций каждой из ее составляющих. Прослеживается четкое разделение на техническую и экономическую составляющие в каждом из ее уровней.
Список литературы К вопросу автоматического управления приводом глубинного штангового насоса
- Садов, В.Б. Оценка параметров нефтедобычи и управление насосной установкой с использованием динамограмм/В.Б. Садов//Вестник ЮУрГУ. Серия «Компьютерные технологии, управление, радиоэлектроника». 2013. Т. 13, № 2. С. 33-41.
- Колесников, А.А. Синергетическая теория управления/А.А. Колесников. Таганрог: ТРТУ; М.: Энергоатомиздат. 1994. 344с.
- Зубаиров, И.Ф. Интеллектуальная скважина повышение эффективности механизированной добычи/И.Ф. Зубаиров//Инженерная практика. 2011. № 5. С.84-89.
- Байков, И.Р. Методы анализа надежности и эффективности систем добычи и транспорта углеводородного сырья/И.Р. Байков, Е.А. Смородов, К.Р. Ахмадуллин. М.: ООО «Недра-Бизнесцентр», 2003. 275 с.
- Сакаев, А.Ф. Системы и алгоритмы энергосберегающего управления частотно-регулируемыми электроприводами штанговых скважинных насосных установок: дис.. канд. техн. наук./А.Ф. Сакаев. СПб., 2009. 148 с.
- Локтев, А. Испытание станций управления с преобразователем частоты Danfoss для УШГН в ОАО «ТНК-Нижневартовск»/А. Локтев, И. Болгов, Д. Косилов//Новатор. 2012. -№ 1 (47). С. 16-20.
- Садов, В.Б. Определение дефектов оборудования нефтяной скважины по динамограмме/В.Б. Садов//Вестник ЮУрГУ. Серия «Компьютерные технологии, управление, радиоэлектроника». 2013. Т. 13, № 1. С. 61-71.
