К вопросу идентификации проектных параметров наноспутника в процессе полёта

Автор: Белоконов Игорь Витальевич, Ломака Игорь Андреевич
Журнал: Космическая техника и технологии @ktt-energia
Рубрика: Управление и обработка информации
Статья в выпуске: 3 (38), 2022 года.
Бесплатный доступ
В работе рассмотрена проблема формирования области применимости процедуры идентификации вектора проектных параметров наноспутника в процессе лётно-конструкторских испытаний. Вектор проектных параметров включает в себя безразмерные коэффициенты инерции и конструктивный коэффициент аэродинамического момента. Выбор состава вектора проектных параметров обусловлен их чувствительностью к изменениям конфигурации и массы наноспутника в процессе полёта. Представлены результаты статистического моделирования, позволяющие сформировать требования к бортовым измерительным средствам типового наноспутника, времени накопления выборки измерений, а также к бортовой математической модели динамики его углового движения. Для проведения моделирования была составлена модель проектно-баллистических характеристик типового наноспутника. Процедура идентификации вектора проектных параметров строилась на обработке измерительной информации, получаемой от двух измерительных средств - магнитометра и датчика угловой скорости. Статистическое моделирование было проведено для разных этапов реализации космической миссии (этап отделения от носителя и этап штатного функционирования). Выбран наиболее адекватный закон распределения погрешностей идентификации параметров наноспутника (логнормальный закон распределения). Получены аналитические зависимости параметров закона распределения в зависимости от типа и характеристик измерительных средств и времени накопления выборки измерений для типового наноспутника формата 3U. Эти зависимости могут быть использованы как на предварительном этапе проектирования наноспутника, так и на этапе оперативного формирования полётного задания для уже созданного наноспутника.
Наноспутник, идентификация, обработка измерений, алгоритм
Короткий адрес: https://sciup.org/143179478
IDR: 143179478 | УДК: 629.783:681.51
Towards in-flight identification of design parameters of a nanosatellite
The paper addresses the problem of defining the domain of applicability for the procedure of identifying the design parameters vector for a nanosatellite in the course of flight development tests. The design parameters vector includes dimensionless inertia factors and design factor of aerodynamic torque. The choice of parameters included in the design parameter vector is driven by their sensitivity to variations in the nanosatellite configuration and mass in the course of the mission. The paper provides results of statistical simulations which make it possible to establish requirements for onboard measuring equipment of a generic nanosatellite, time for accumulating a series of measurement data, as well as for onboard math model of its angular motion dynamics. In order to perform the simulations, a model of design ballistics characteristics of a generic nanosatellite was built. The procedure for identifying the design parameter vector was based on processing the measurement data received from two instruments - a magnetometer and an angular rate sensor. Statistical simulations were run for various phases of a space mission (the phase of the separation from the launch vehicle and the nominal operations phase). The most adequate distribution law was selected for the nanosatellite parameter identification errors (lognormal distribution law). Analytic dependences were obtained for the distribution law parameters depending on the type and properties of the instruments and the time need to accumulate a series of measurement data for a standard 3U-size nanosatellite. These dependencies could be used both at the preliminary stage of nanosatellite design and at the phase of operational mission task generation for an already existing nanosatellite.
Текст научной статьи К вопросу идентификации проектных параметров наноспутника в процессе полёта
Существенный прогресс в области микроэлектроники и стремление обеспечить минимальную стоимость разработки и создания космического аппарата привели к появлению такого класса космических аппаратов, как наноспутники (НС). В настоящее время НС всё чаще применяются для реализации разнообразных космических миссий — обеспечения глобальной сети связи [1], инспекции космических объектов [2–4], дистанционного зондирования Земли [5–7] и т. д. Необходимость решения этих актуальных фундаментальных и прикладных задач предполагает развёртывание низкоорбитальных группировок НС [8–11], в которых каждый участник должен обладать повышенной манёвренностью, энергообеспеченностью и автономностью.
Невысокая энергетика и ограниченный объём пространства для размещения полезной нагрузки требуют использования на борту НС различных трансформируемых конструкций (раскрывающиеся солнечные панели, выдвижные штанги с аппаратурой и т. д.). Кроме того, на НС часто размещаются двигательные установки, которые в процессе решения целевых задач расходуют рабочее тело, что приводит к необходимости рассмотрения НС как тела переменного состава. В результате вышеперечисленных обстоятельств заметно изменяются инерционные и аэродинамические характеристики НС, а также запас статической устойчивости, что крайне важно для низкоорбитальных миссий, для которых влияние атмосферы Земли на характер движения является существенным. Так, в работе [12] исследовалось влияние трансформируемых конструкций НС на его аэродинамические характеристики, и было показано, что неучёт трансформируемых конструкций приводит к погрешности оценки аэродинамических характеристик НС 15–20%, что влияет на динамику его углового движения.
Вышеописанные особенности требуют рассмотрения НС как объекта с переменными тензором инерции, положением центра масс и центра давления. Изменения этих параметров оказывают влияние на функционирование системы управления НС. Работа [13] исследует влияние погрешности знания моментов инерции на погрешность реализации процедуры переориентации, например, погрешность знания моментов инерции 5–10% приводит к погрешности переориентации 8-10°.
Процедура идентификации может быть реализована двумя различными способами в зависимости от подхода к обработке измерительной информации. Первый способ — идентификация по накопленной выборке измерений предполагает формирование массива измерений на определённом интервале времени и его последующую обработку. Данный способ впервые был реализован В.В. Белецким в 1961 г. при обработке магнитометрических измерений с борта космического аппарата «Спутник-3» [14]. При использовании данного способа широкое распространение получила обработка измерений, основанная на методе наименьших квадратов. В работах [15–20] рассмотрены подходы к оценке различных характеристик космических аппаратов (параметры углового движения, инерционные характеристики). Для обработки измерений использовались методы Гаусса– Ньютона [18–20], Левенберга–Марквард-та [16, 17] и дифференциальной эволюции [15]. Погрешность процедуры оценки параметров космических аппаратов составила 5–15%.
Второй способ — идентификация в темпе поступления измерений, при котором оценки параметров непрерывно уточняются в процессе обработки информации. При этом наиболее популярными являются подходы, основанные на реализации расширенного фильтра Калмана [21, 22]. Такие подходы часто используют при осуществлении процедуры активной идентификации с использованием управляющих моментов [23, 24]. Погрешность оценки инерционных параметров космических аппаратов при таком подходе составляет 3–7%.
Однако, ввиду существенно ограни- ченных вычислительных ресурсов на борту НС, более приемлемой является реализация процедуры идентификации по накопленной выборке измерений.
Таким образом, реализация современных космических миссий с исполь- зованием НС решения на са обратных
вызывает необходимость борту НС комплек-задач параметрической идентификации, результаты решения которых могут быть использованы в контуре системы управления движением для повышения качества процесса управления, а также при оперативном анализе полётной информации для выявления признаков нештатного функционирования.
Особенно актуальной оценка текущих проектных параметров НС становится в условиях априорной неопределённости как внешних [25], так и внутренних факторов [22, 26–28], влияющих на процессы управления космическим аппаратом. Включение процедуры идентификации в контур системы управления движением позволит повысить качество процессов управления за счёт формирования дополнительной обратной связи по изменяющимся в процессе функционирования проектным параметрам космического аппарата.
В данной работе сформирована и исследована область применимости процедуры идентификации проектных параметров НС, изменяющихся в процессе полёта. При этом рассматривалась оценка таких проектных параметров, как безразмерные коэффициенты инерции и коэффициенты, учитывающие влияние аэродинамического момента на угловое движение.
постановка задачи
Угловое движение низкоорбитальных НС описывается системой динамических уравнений Эйлера [18, 19]:
ω. x = μ ( ω y ω z – ν G a 21 a 31 ) + ε a x ,
ω. = ( ω ω – ν a a ) + ε , (1)
y Хц 11 317 1 + Хц a y’ V 7
ωz = –(1 – λ + λμ)(ωxωy – νGa11a21) + λεaz и кинематических уравнений в кватернионах [15]:
q. = ωq ,
Ix Iy – Iz где λ = I и μ = I — безразмерные коэффициенты инерции; q — кватернион ориентации; ω = (ωx ωy ωz) — вектор угловой скорости; νG
3 µ e r 3
— коэффициент
гравитационного момента.
В правых частях динамических уравнений также учитывается угловое ускорение, вызванное влиянием аэродинамического момента, ε = ( K a × v c )| v c | ρ , где v c — вектор орбитальной скорости в связанной системе координат;
Ka = 2I CDSd — вектор конструктивных x коэффициентов аэродинамического момента; Ix — момент инерции вокруг оси X; CD — коэффициент аэродинамического сопротивления; S — характерная площадь НС; d — вектор, определяющий положение центра давления относительно центра масс НС; ρ — плотность атмосферы на высоте полёта НС. Так как в статье рассматривается угловое движение НС с типовыми проектно-баллистическими характеристиками без привязки к конкретной ориентации орбиты по отношению к Солнцу, то при расчётах использовалась модель плотности атмосферы для среднего уровня солнечной активности с усреднением на интервале сбора измерительной информации.
Состав вектора оцениваемых параметров математической модели углового движения НС представлен следующим выражением:
b = ( λ μ K а ).
Широкое применение на НС получила система измерений, включающая в себя магнитометр и/или датчик угловой скорости (ДУС), созданные на базе МЭМС-технологий. Это объясняется тем, что такие измерительные средства имеют невысокую стоимость, приемлемую точность, малые габариты и энергопотребление.
Измерения ω(t), получаемые с ДУС, моделируются решением динамических уравнений Эйлера (1). Учитываются случайные погрешности измерений в виде аддитивного вектора случайной величины wω, компоненты которого независимы и распределены по нормальному закону с нулевым математическим ожиданием и заданным среднеквадратическим отклонением σω. Измерения магнитометра формируются с использованием модели IGRF [29], а случайные погрешности — аналогично погрешностям ДУС.
Инструментальные погрешности, отражающие смещение нуля, изменение линейной характеристики датчика, не учитываются в данной работе, однако могут быть также включены в расширенный вектор оцениваемых параметров. Таким образом, математические модели измерений для ДУС и магнитометра запишутся в следующем виде:
C m ( b , t ) = ю изм ( t ) = ^ ( b , t ) + wM, t );
CB(b, t) = Визм(t) = A(b, t)Ворб + wB(^B, t), где A(b, t) — матрица перехода из орбитальной в связанную систему координат [15]; Bорб — вектор напряжённости магнитного поля Земли в орбитальной системе координат, рассчитанный по модели IGRF.
Для построения области применимости процедуры идентификации в работе предлагается использовать модель проектно-баллистических параметров типового НС. Параметры данной модели получены из анализа статистики запусков НС [30].
В дальнейшем рассматриваются НС наиболее популярного формата CubeSat-3U [31] массой 3 кг. Исследования проведены для типового НС, который близок к динамически симметричному телу ( X « 1,01; ц ~ -0,85), при этом коэффициенты K а х , K а z ^ 0, а K а y ~ 0,003 м/кг, что соответствует смещению центра масс НС только по продольной оси. Так как НС чаще всего запускаются с МКС [31], высота орбиты принимается равной 400 км. Модуль угловой скорости принимается равным |ш | ~ 1 ° /c, что соответствует транспортно-пусковым контейнерам (ТПК), изготавливаемым на предприятиях ГК «Роскосмос» [32], а при использовании коммерческих бюджетных ТПК, например, фирмы ISIS , может достигать значений до 65 ° /с [33].
Задача идентификации вектора b НС формулируется следующим образом: выполнить идентификацию вектора проектных параметров b по выборке векторов измерений, проводимых на борту НС в течение заданного интервала времени Т. Поставленная задача решается путём минимизации следующей целевой функции [15]:
N
J(b, T) = ^>1(C(t)) - C(b, t)))2 ^ min, где C(t) — вектор измерений; C(b, t) — модельное значение вектора измерений;
N = ^- — число измерений; A t — шаг измерений; T — интервал сбора измерительной информации.
Для оценки погрешности идентификации i -го компонента вектора b используется следующее выражение [34]:
" ,„„ _ d J ( B , T ) .
δ bi = ∂ b i ;
δ b i
d J (b, 7 ) V1
σ 2
∂ b изм
z
Формирование области погрешностей 8X , 5ц и 5 K а y производилось на интервалах сбора измерительной информации 1 000…15 000 с. Измерения проводились с шагом A t = 10 c. Характеристики измерительных средств отражают точность бортовых измерительных средств НС, доступных на рынке. Так, в данной работе моделировались измерения магнитометров с погрешностями ст B 20^300 нТл и ДУС с погрешностями стш 0,01^0,11 ° /c. Выбор величин ст B и стш обоснован широким использованием на борту НС измерительных средств с характеристиками, находящимися в представленных диапазонах [30] .
∂ J ( b i , T )
Производные решались численно
∂b г в окрестностях истинных значений искомых параметров. Для каждого расчётного случая проводилось 100 моделирований.
результаты моделирования
На рис. 1 представлены функции распределения погрешностей оценки компонент вектора b , построенные по результатам статистического моделирования ДУС c наилучшими и наихудшими точностными характеристиками и времени накопления измерений 1 000 и 15 000 с.
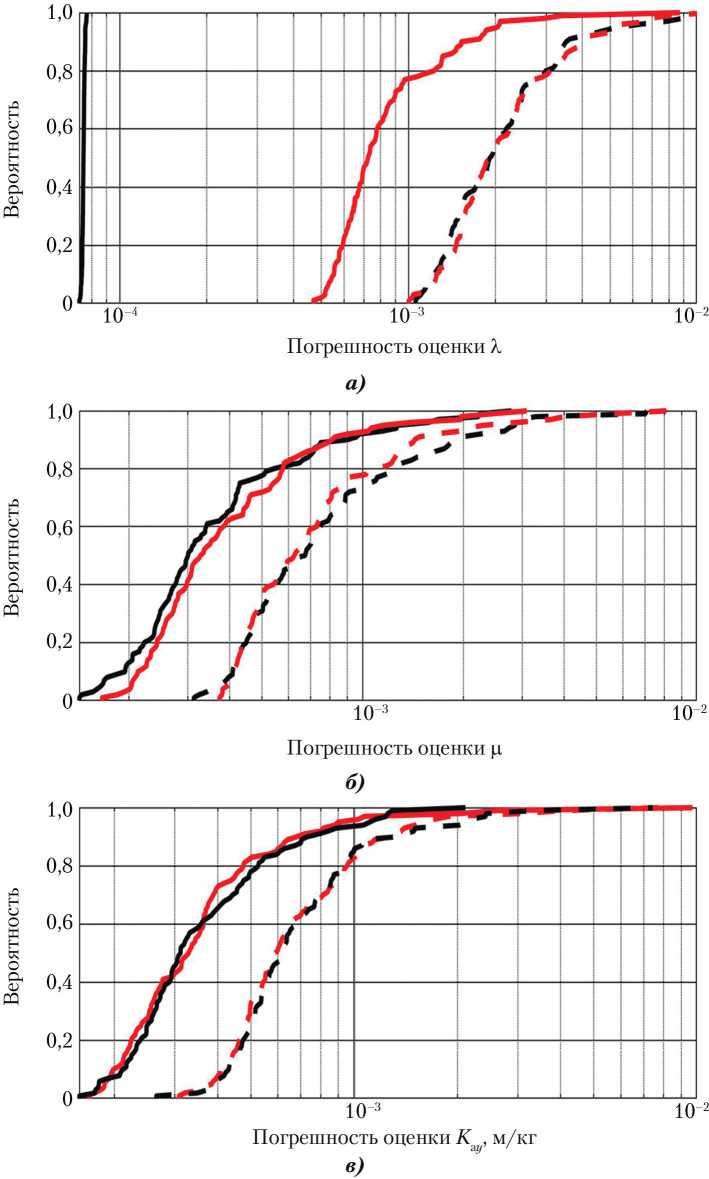
Рис. 1. Функции распределения погрешностей оценки компонент вектора b: a — параметра X ; б — параметра ц ; в — параметра К а ; — — — — ат = 0,11 ° /с, T = 1 000 с; ^— - 0,11 ° /с, T = 15 000 с; “ — — — — ^ „ "= 0,01 ° /с, T = 1 000 с; ^— — ат = 0,01 ° /с, T = 15 000 с
Примечание. Измерительное средство — датчик угловой скорости.
Результаты статистического моделирования показали эффективность использования ДУС при оценке параметра X , так как данный параметр характеризует динамическую симметрию НС, а значит и степень связанности каналов угловой скорости НС. Малые изменения X приводят к существенному изменению динамики вращения НС. Погрешность оценки параметра ц слабо зависит от характеристик ДУС, однако наблюдается ожидаемое снижение величины погрешности при увеличении времени накопления измерительной информации, что иллюстрирует рис. 2.
Показана неэффективность использования ДУС при оценке конструктивного аэродинамического коэффициента K а y — погрешность оценки сопоставима с величиной оцениваемого параметра. Это связано с тем, что влияние аэродинамического момента не приводит к достаточному изменению угловой скорости НС на рассматриваемых промежутках времени. На более продолжительных интервалах времени неопределённость параметров модели атмосферы Земли затрудняет прогнозирование и расчёт углового движения НС, что делает нецелесообразным использование ДУС в этих целях.
На рис. 3 представлены функции распределения
Полученные функции (рис. 1–3) формируют границы области распределения погрешностей оцениваемых параметров. В табл. 1 приведены максимальные погрешности оценки компонент вектора b для доверительной вероятности P = 0,95.
погрешностей оценки компонент вектора b , построенные по результатам статистического моделирования при использовании магнитометра. Приведены функции распределения только для наиболее и наименее точных магнитометров и для времени накопления измерений 1 000 и 15 000 с.
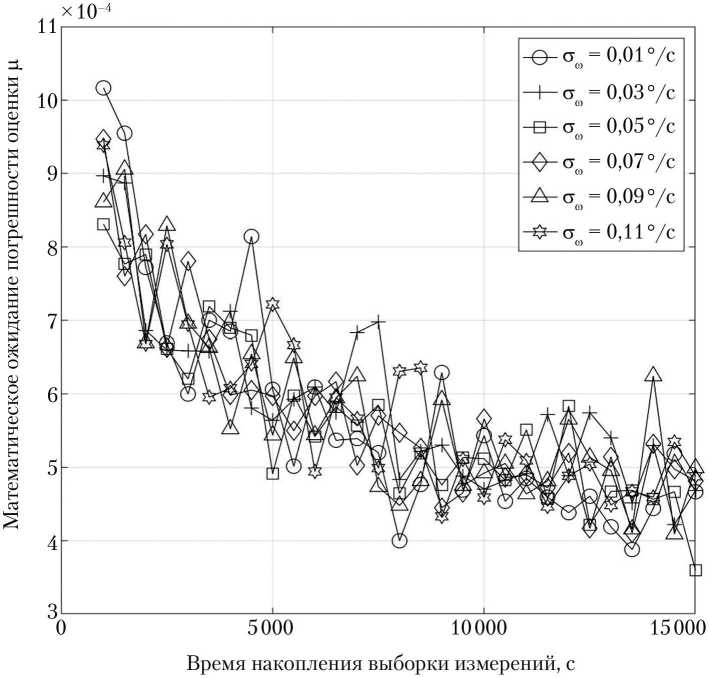
Рис. 2. Математическое ожидание погрешности оценки μ Примечание. Измерительное средство — датчик угловой скорости.
Представленные на рис. 5–7 зависимости формируют границы области распределения погрешностей оцениваемых параметров. В табл. 2 приведены максимальные погрешности оценок компонент вектора b для вероятности P = 0,95.
Выполненный анализ эффективности различных измерительных средств НС показал, что магнитометр является предпочтительным измерителем в задаче идентификации вектора b . При использовании высокоточного магнитометра для оценки параметра K а y на продолжительном интервале сбора измерительной информации относительная погрешность оценки составила ~2%. В то же самое время погрешности оценки безразмерных коэффициентов инерции сопоставимы с погрешностями, полученными при использовании ДУС.
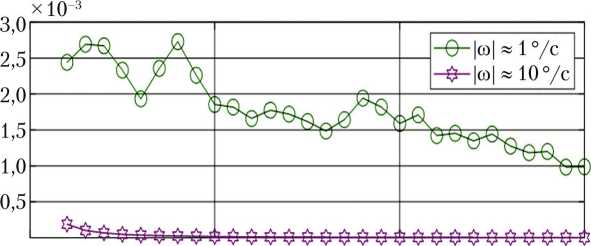
Было проведено дополнительное статисти- ческое исследование оценки эффективности использования ДУС для компонент вектора b
идентификации
при движении НС с высокой угловой скоростью |w| ~ 10 °/c. Такая величина угловой скорости может возник- нуть при использовании коммерческих
ТПК для отделения НС от носителя.
Таблица 1
максимальные погрешности оценок компонент вектора b для вероятности P = 0,95
|
Параметр |
Истинное значение |
T = 1 000 с |
T = 15 000 с |
||
|
ст „ = 0,01 ° /c |
ст „ = 0,11 ° /c |
ст „ = 0,01 ° /c |
ст „ = 0,11 ° /c |
||
|
X |
1,01 |
0,0053 |
0,0053 |
0,00008 |
0,002 |
|
Ц |
–0,85 |
0,003 |
0,002 |
0,0013 |
0,0011 |
|
K а y , м/кг |
0,003 |
0,0021 |
0,0015 |
0,0011 |
0,0009 |
Таблица 2
максимальные погрешности оценок компонент вектора b для вероятности P = 0,95
|
Параметр |
Истинное значение |
T = 1 000 с |
T = 15 000 с |
||
|
ст B = 20 нТл |
ст B = 300 нТл |
ст B = 20 нТл |
ст B = 300 нТл |
||
|
X |
1,01 |
1∙10–5 |
2∙10–3 |
2,2∙10–6 |
3,4∙10–5 |
|
Ц |
–0,85 |
2∙10–3 |
1,6∙10–3 |
3∙10–5 |
1∙10–3 |
|
K а y , м/кг |
0,003 |
1,8∙10–3 |
1,9∙10–3 |
6∙10–5 |
1∙10–3 |
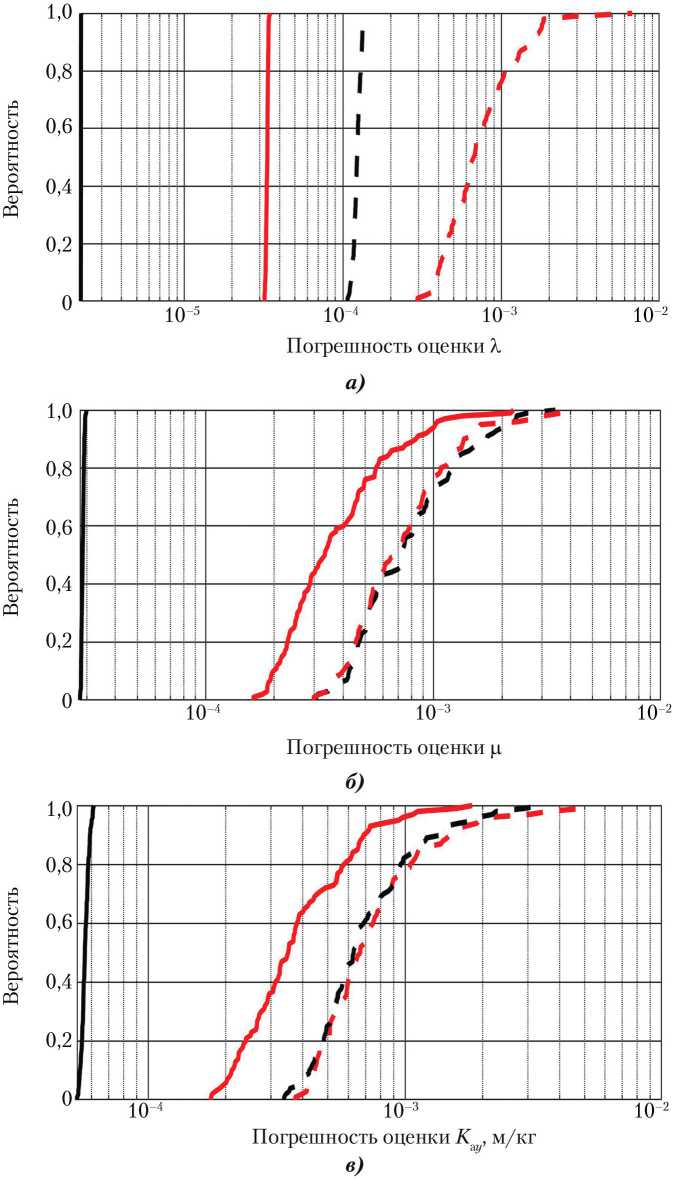
3. Функции распределения погрешностей оценки компонент вектора b:
Рис.
σ B = 300 нТл,
—
20 нТл, T = 1 000 c;
a — параметра X ; б — параметра ц ; в — параметра K y ; ■ ■ ■
T = 1 000 с; ^^^" — ст B = 300 нТл, T = 15 000 с; ■ ■ ■ — ст B ^^^" — ст B = 20 нТл, T = 15 000 с
Примечание. Измерительное средство — магнитометр.
На рис. 4 приведены погрешности оценки параметров λ , μ при различной угловой скорости движения НС. Анализ результатов позволяет сделать вывод, что погрешность оценки параметров уменьшается при увеличении угловой скорости НС.
модели распределения погрешностей идентифицируемых параметров
Аналитические модели распределения погрешностей идентификации вектора проектных параметров типового НС могут применяться для решения следующих задач:
-
• формирование циклограммы функционирования НС при мониторинге его проектных параметров в процессе полёта;
-
• оценка эффективности бортовых измерительных средств НС;
-
• формирование требований к бортовым измерительным средствам НС.
Модели могут применяться как на этапе проектирования космической миссии, так и при её реализации.
На основе проведённого обширного статистического моделирования построены функции распределения погрешностей идентификации δλ, δμ и δKаy. Проверка гипотез о законах распределения выполнялась по методу максимального правдоподобия [35]. Анализ сформированных выборок реализаций на соответствие нормальному, логнормальному и логистическому законам распределения показал, что распределение погрешностей лучше всего описывается логнормальным законом рас- пределения. Например, на рис. 5 приведены функции правдоподобия для нормаль ного, логнормального и ло
-
-
гистического распределений для параметра δλ при использовании магнитометра σ B = 20 нТл. Значения функции правдоподобия для логнормального распределения оказались больше, чем для других законов. На малых интервалах времени разница составляет ~15%, а на длительных интервалах 5%.
s i
я и о
о
s
s я
о
s о с о я
Логнормальное распределение случайной величины x описывается двумя парамет-
рами
x
и ст x . Плотность
вероятности случайной величины x для такого закона описывается выражением
1 (ln x – θ x )2 fX ( x ) = 1 e 2 σ x 2 . (2)
x
Время накопления выборки измерений, с а)
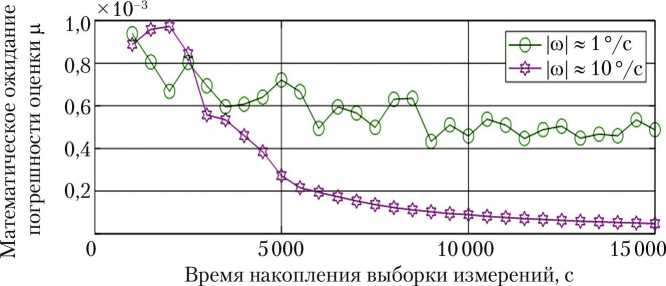
Рис. 4. Математическое ожидание погрешности оценок параметров: а — X ; б — ц
Примечание. Измерительное средство — датчик угловой скорости аш = 0,11 °/с.
Математическое ожидание случайной величины определяется как
σ2 θ x + x M ( x ) = e 2
.
Дисперсия случайной ве личины определяется выра жением
D ( x ) = ( e ст x - 1) e 2 9 x + ст x 2 .
Например, на рис. 6
ведены метров
зависимости распределения
-
-
при пара
-
-
9 дЛ
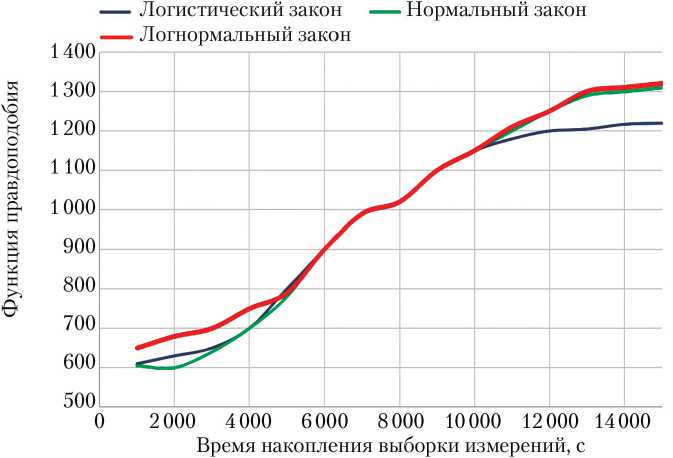
Рис. 5. Сравнение функций правдоподобия для различных законов распределения для параметра 8X
и ст дЛ от времени накопления выборки измерений T и точности магнитометра ст B .
Были получены аналитические функции параметров логнормального распределения погрешностей оценки вектора проектных параметров в зависимости от T и ст изм путём аппроксимации результатов численных экспериментов функцией вида
Ф ( ст изм , T ) = Р 00 + Р 10 СТ изм +
+ Р 01 T + Р 20 ст изм + Р 11 ст изм T +
23 2
Р 02 Р 30 ст изм Р 21 ст изм
+ Р 12 ст изм
T 2 + p 03 T 3 .
Следует отметить, что поведение функций правдоподобия, приведённых на рис. 5, характерно и при использовании ДУС. Логнормальный закон более адекватен результатам проведённого параметрического анализа и может быть принят для описания распределения погрешностей идентификации на всех промежутках времени.
Исследование показало, что выбор третьей степени аппроксимирующей функции является достаточным в рассматриваемой задаче. Использование аппроксимаций более высокого порядка не сказывается на последующих результатах.
Значения коэффициентов аппроксимирующей функции при использовании магнитометра приведены в табл. 3.
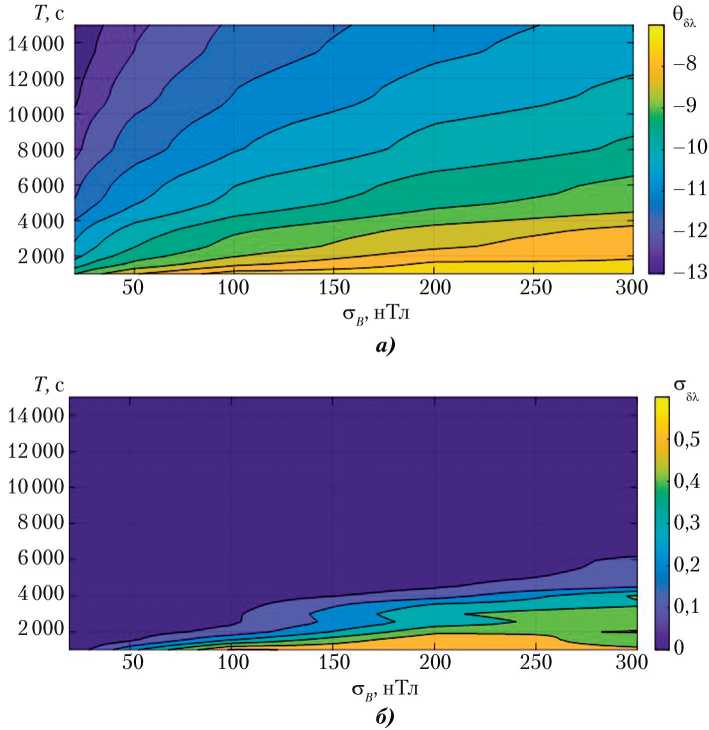
Рис. 6. Зависимости параметров законов распределения от времени ния выборки измерений T и погрешности магнитометра σB: б — параметра σδλ накопле- a — параметра θδλ;
Аналогичным образом были получены аналитические зависимости параметров распределения σδμ, σδλ, σδKay, θδμ, θδλ и θδKay в случае использования ДУС. Значения коэффициентов аппроксимирующей функции при использовании ДУС приведены в табл. 4.
Таким образом, аппроксимирующие функции с коэффициентами из табл. 3, 4, а также соотношения (2)–(4) позволяют получить аналитические выражения для плотности вероятности, математического ожидания и дисперсии погрешностей идентификации параметров НС, которые могут быть использованы разработчиками НС как на этапе проектирования, так и при эксплуатации на орбите.
иллюстрация применения полученных моделей
Иллюстрация использования разработанных моделей приведена на примере двух задач для типового НС, запускаемого с МКС: первая должна решаться при выборе циклограммы работы бортовых систем НС на этапе формирования полётного задания, вторая — при выборе состава измерительных средств на этапе создания НС, обеспечивающих решение целевой задачи.
Таблица 3
значения коэффициентов p аппроксимирующей функции при использовании магнитометра
|
p |
θ δμ ( σ B , T ) |
θ δλ ( σ B , T ) |
θδ K a y ( σ B , T ) |
σδμ ( σ B , T ) |
σδλ ( σ B , T ) |
σ δ K a y ( σ B , T ) |
|
p 00 |
–7,631 |
–9,426 |
–7,316 |
0,442 |
0,022 |
0,526 |
|
р 10 |
0,011 |
0,0211 |
0,0128 |
0,003 |
0,0006 |
0,002 |
|
p 01 |
–2,156∙10–4 |
–4,829∙10–4 |
–2,338∙10–4 |
–4,562∙10–5 |
0 |
–3,003∙10–5 |
|
p 20 |
–3,719∙10–5 |
–3,903∙10–5 |
–1,217∙10–4 |
–9,457∙10–6 |
0 |
–7,778∙10–6 |
|
p 11 |
–6,752∙10–7 |
–1,755∙10–8 |
1,745∙10–6 |
1,668∙10–7 |
–8,245∙10–8 |
1,444∙10–7 |
|
p 02 |
0 |
1,58∙10–8 |
1,862∙10–9 |
0 |
9,785∙10–10 |
–5,378∙10–10 |
|
p 30 |
0 |
0 |
2,702∙10–7 |
0 |
0 |
0 |
|
p 21 |
0 |
0 |
4,212∙10–9 |
0 |
0 |
0 |
|
p 12 |
0 |
0 |
3,07∙10–12 |
0 |
0 |
0 |
|
p 03 |
0 |
0 |
0 |
0 |
–3,319∙10–14 |
0 |
Таблица 4
значения коэффициентов p аппроксимирующей функции при использовании дуС
|
p |
θ δμ ( σ ω , T ) |
θ δλ ( σ ω , T ) |
θ δ K a y ( σ ω , T ) |
σδμ ( σω , T ) |
σδλ ( σω , T ) |
σ δ K a y ( σ ω , T ) |
|
p 00 |
–7,213 |
–5,898 |
–7,196 |
0,6564 |
0,5115 |
0,5416 |
|
P 10 |
–0,087 |
10,43 |
–0,295 |
–2,619 |
6,91 |
–0,08 |
|
p 01 |
–9,042∙10–5 |
–0,0004 |
–9,413∙10–5 |
–1,034∙10–5 |
–0,0001 |
1,42∙10–6 |
|
p 20 |
0 |
–130,4 |
0 |
12,35 |
–87,27 |
0 |
|
p 11 |
3,988∙10–5 |
0,006 |
2,637∙10–5 |
0,0002 |
0,001 |
0 |
|
p 02 |
2,975∙10–9 |
1,867∙10–8 |
3,31∙10–9 |
–4,467∙10–10 |
5,906∙10–9 |
0 |
|
p 30 |
0 |
0 |
0 |
17,2 |
138,6 |
0 |
|
p 21 |
0 |
–0,014 |
0 |
–0,001 |
0,003 |
0 |
|
p 12 |
0 |
–1,406∙10–7 |
0 |
–4,085∙10–9 |
–6,316∙10–8 |
0 |
|
p 03 |
0 |
–3,432∙10–13 |
0 |
5,065∙10–14 |
–1,013∙10–13 |
0 |
Задача 1. Для НС изменяемой конфигурации, оснащённого аэродинамическим стабилизатором [36], выбрать циклограмму работы бортовых измерительных средств (сформировать время накопления магнитометрических измерений для оценки инерционных характеристик — коэффициентов инерции НС с погрешностью δλ max ≤ 0,0005 и δμ max ≤ 0,0006), если бортовой магнитометр НС имеет точность σ B = 250 нТл. Требования к погрешности оценки инерционных параметров формируются, исходя из возможности оценки перемещения аэродинамического стабилизатора. С использованием аппроксимирующей функции с коэффициентами из табл. 4 были получены зависимости, представленные на рис. 7.
Согласно рис. 7, требуемая точность оценки параметра λ достигается на интервале 1 700 с, а параметра μ — на интервале 8 700 с. Таким образом, для уточнения инерционных параметров НС с допустимыми погрешностями требуется накопление измерений на интервале ~9 000 с. Этот интервал времени должен быть учтён при формировании циклограммы полёта НС.
Задача 2. Сформировать требования к необходимой точности бортового магнитометра σ B . Магнитометрические измерения используются для оценки коэффициентов инерции НС. Погрешность измерений должна позволять оценивать коэффициенты инерции НС с погрешностями не хуже 0,005 по параметру λ и не хуже 0,004 — по параметру μ . При выполнении миссии инерционные параметры (коэффициенты инерции НС) могут изменяться в пределах ± 5% от номинальных значений. Такое изменение коэффициентов инерции может наблюдаться при выработке рабочего тела за счёт работы двигательной установки НС [37].
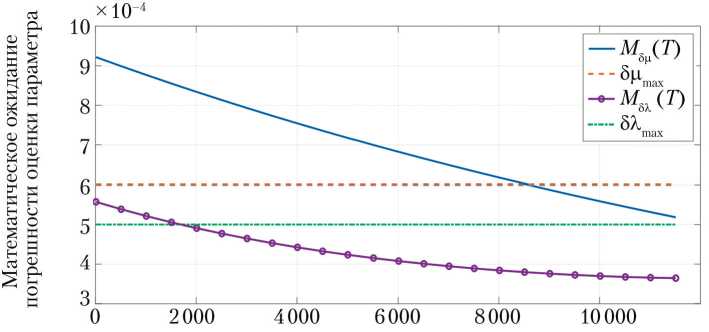
Время накопления выборки измерений, с
Рис. 7. Зависимость математического ожидания погрешности оценки параметров λ и μ от времени накопления выборки измерений Т: σλ max и σμ max — допустимые погрешности оценки параметров λ и μ , соответственно
Допустимые погрешности оценки параметров выбраны на порядок меньше, чем изменения самих параметров. С использованием аппроксимирующей функции с коэффициентами из табл. 3 были получены графические зависимости, изображённые на рис. 8.
Согласно рис. 8, при заданных условиях задачи целесообразно использовать магнитометр с погрешностью измерений не хуже σ B = 400 нТл, что соответствует показателям точности магнитометров, присутствующих на рынке измерительных средств и широко используемых в составе НС. Точностные характеристики магнитометра слабо влияют на оценку параметра μ .
заключение
Построены и исследованы области применимости различных измерительных средств в задаче идентификации параметров НС при его функционировании на орбите. Результаты параметрических исследований позволяют сделать вывод о предпочтительности использования ДУС для оценки инерционных характеристик НС ( λ , μ ). В этом случае возможно упрощение математической модели (1) за счёт неучёта воздействия аэродинамических сил. Такое решение может быть эффективным для НС переменной массы (например, оснащённого двигательной установкой), у которого инерционные характеристики более чувствительны к изменению массы, чем параметр K а y .
Использование ДУС эффективно на коротких интервалах сбора измерительной
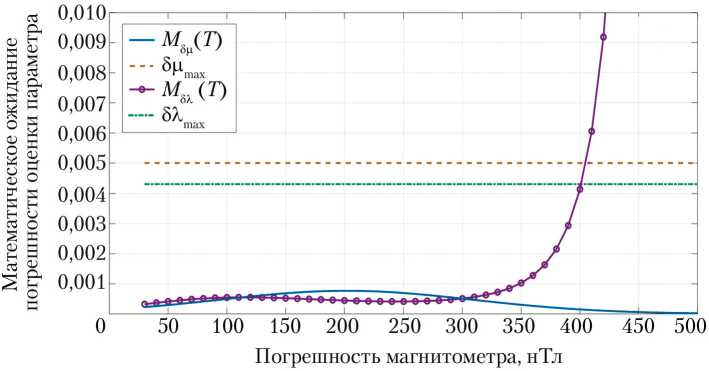
Рис. 8. Зависимость математического ожидания погрешности оценки параметров λ и μ от погрешности магнитометрических измерений σ B: δλ max и δμ max — допустимые погрешности оценки параметров λ и μ , соответственно
информации, а также при движении НС с высокой угловой скоростью, например, на этапе отделения от носителя. При этом возможно использование математической модели (1) без учёта возмущающих моментов.
Для оценки аэродинамических характеристик НС ( K а y ) требуется наличие на борту высокоточного магнитометра σ B = 10…30 нТл. Интервал сбора измерительной информации должен составлять порядка трёх орбитальных витков. Для получения корректных результатов требуется привлечение модели (1), учитывающей влияние гравитационного и аэродинамического моментов.
Показано, что при оценке коэффициентов инерции НС абсолютная погрешность измерений ДУС не имеет определяющего значения. Основную роль играет относительная погрешность ДУС, определяемая через отношение σω к модулю угловой скорости.
Выбран наиболее адекватный закон распределения погрешностей идентификации параметров НС (логнормальный закон распределения). Получены аналитические зависимости параметров закона распределения в зависимости от типа и характеристик измерительных средств и времени накопления выборки измерений для типового НС формата 3 U , которые могут быть использованы как на предварительном этапе проектирования НС, так и на этапе оперативного формирования полётного задания для уже созданного НС.
Исследование выполнено при финансовой поддержке Российского фонда фундаментальных исследований (грант
РФФИ № 20-08-00617-А).
Список литературы К вопросу идентификации проектных параметров наноспутника в процессе полёта
- Arifin J. Study of CUBESAT systems for IoT // 12th International Renewable Engineering Conference, Amman, Jordan. 2021. P. 1-3.
- Spiller D., Magionami E., Schiattarella V., Curti F., Facchinetti C., Ansalone L., Tuozzi A. On-orbit recognition of resident space objects by using star trackers // Acta Astronautica. 2020. V. 177. P. 478-496.
- Riano-Rios C., Bevilacqua R., Dixon W. AdaPtive control for differential drag-based rendezvous maneuvers with an unknown target // Acta Astronautica. 2021. V. 181. P. 733-740.
- Han N, Luo J., Ma W, Yuan J. Integrated identification and control for nanosatellites reclaiming failed satellite // Acta Astronautica. 2018. V. 146. P. 387-398.
- Farrag A., Othman S., Mahmoud T.Y., ELRaffiei A.Y. Satellite swarm survey and new concePtual design for Earth observation aPPlications // The EgyPtian Journal of remote sensing and sPace science. 2021. V. 24. P. 47-54.
- Santilli G., Vendittozzi C., CaPPelletti C., Battistini S., Gessini P. CubeSat constellations for disaster management in remote areas // Acta Astronautica. 2018. V. 145. P. 11-17.
- Guerra A., Ferreira A.S., Costa M., Nodar-LoPez D., Agelet F.A. Integrating small satellite communication in an autonomous vehicle network: A case for oceanograPhy // Acta Astronautica. 2018. V. 145. P. 229-237.
- LiPPe C., D'Amico S. OPtimal sPacecraft swarm reconfiguration through chief orbit refinement // Acta Astronautica. 2021. V. 183. P. 162-175.
- Koenig A.W., D'Amico S. Robust and safe N-sPacecraft swarming in Perturbed near-circular orbits // Journal of guidance, control and dynamics. 2021. V. 41. P. 1643-1662.
- Koenig A WW., D'Amico S. Safe sPacecraft swarm dePloyment and acquisition in Perturbed near-circular orbits subject to oPerational constraints // Acta Astronautica. 2018. V. 153. P. 297-310.
- Lim Y. In-Plane formation reconfiguration with radial maneuvers // Journal of guidance control and dynamics. 2020. V. 43. P. 1881-1892.
- Баринова Е.В., Болтов Е.А., Ели-сов Н.А., Ломака И.А. Уточнённая оценка аэродинамических характеристик наноспутника сложной геометрии // Инженерный журнал: наука и инновации. 2021. № 10(118). С. 1-15.
- Belokonov I.V., Kramlikh A.V., Melnik M.E. Analysis of the influence of the error of the nanosatellite design and dynamic Performances on the quality of angular motion control Processes // IOP Conference Series: Materials Science and Engineering, Samara, Russia. 2020. V. 984. P. 1-7.
- Белецкий В.В., Зонов Ю.В. Вращение и ориентация третьего советского спутника // Искусственные спутники Земли. 1961. № 7. С. 32-55.
- Belokonov I.V., Kramlikh A.V., Lomaka I.A., Nikolaev P.N. Reconstruction of a sPacecraft's attitude motion using the data on the current collected from solar Panels // Journal of comPuter and systems sciences international. 2019. V. 58. № 2. P. 286-296.
- Belyaev M.Y., Matveeva T.V., Monakhov M.I., Rulev D.N., Sazonov V.V. Reconstruction of rotational motion of the Progress sPacecraft in the mode of one-axis solar orientation according to solar array current measurements // Cosmic research. 2021. V. 59. P. 126-141.
- Bulanov D.M., Sazonov V.V. A study of the evolution of the rotational motion of the Foton M-2 // Cosmic research. 2020. V. 58. P. 256-269.
- Abrashkin V.I., Voronov K.E., Dorofeev A.S., Piyakov A.V., Puzin Yu.Ya., Sazonov V.V., Semkin N.D, FiliPPov A.S., Chebukov S.Yu. Detection of the rotational motion of the AIST-2D small sPacecraft by magnetic measurements // Cosmic research. 2019. V. 57. P. 48-60.
- Abrashkin V.I., Voronov K.E., Piyakov A.V., Puzin Yu.Ya., Sazonov V.V., Semkin N.D., FiliPPov A.S., Chebukov S.Yu. Uncontrolled rotational motion of the Aist small sPacecraft PrototyPe // Cosmic research. 2017. V. 55. P. 128-141.
- Abrashkin V.I., Voronov K.E., Piyakov A.V., Puzin Yu.Ya., Sazonov V.V., Semkin N.D, FiliPPov A.S., Chebukov S.Yu. Uncontrolled attitude motion of the small satellite Aist // Cosmic research. 2015. V. 53. P. 360-373.
- Myung H.S., Yong K.K., Bang H. Unscented Kalman filtering for hybrid estimation of sPacecraft attitude dynamics and rate sensor // Advances in sPacecraft technologies. 2011. P. 197-212.
- Bordany R.E., Steyn W.H., Crawford M. In-Orbit estimation of the inertia matrix and thruster Parameters of UoSAT-12, 14th AIAA/USU Conference on Small Satellites. 2000. Logan, Utah, USA. P. 1-10.
- HumPhreys T.E., Psiaki M.L., Klatt E.M., Powell S.P., Kintner Jr. P.M. Magnetometer-based attitude and rate estimation for sPacecraft with wire booms // Journal of guidance, control and dynamics. 2005. V. 28. P. 584-593.
- Bellar A., Mohammed M.A. Satellite inertia parameters estimation based on extended Kalman filter // Journal of aerospace technology and management. 2019. V. 11. P. 1-11.
- Nakka Y.K., Chung S.J., Allison J.T., Aldrich J.B., Alvarez-Salazar O.S. Nonlinear attitude control of a spacecraft with distributed actuation of solar arrays // Journal of guidance, control and dynamics. 2019. V. 42. P. 458-475.
- Aslanov V.S. Chaotic attitude dynamics of a LEO satellite with flexible panels // Acta Astronautica. 2021. V. 180. P. 538-544.
- Sun R., Riano-Rios C., Bevilacqua R., Fitz-Coy N.G., Dixon W.E. Cube Sat adaptive attitude control with uncertain drag coefficient and atmospheric density // Journal of guidance, control and dynamics. 2021. V. 44. P. 379-388.
- Golpashin A.E., Yeong H.C., Ho K., Namachchivaya N.S. Spacecraft attitude control: a consideration of thrust uncertainty // Journal of guidance, control and dynamics. 2020. V. 43. P. 2349-2365.
- Pichuzhkina A.V., Roldugin D.S. Geomagnetic field models for satellite angular motion // Keldysh Institute Preprints. 2016. № 87. 25 p.
- Poghosyan A., Golkar A. CubeSat evolution: Analyzing CubeSat capabilities for conducting science missions // Progress in aerospace sciences. 2017. V. 88. P. 59-83.
- Villela T., Costa C.A., Brandao A.M., Bueno F.T., Leonardi R. Towards the thousandth CubeSat: a statistical overview // International Journal of aerospace engineering. 2019. V. 2019. P. 1-13.
- Белоконов И.В., Тимбай И.А., Николаев П.Н., Оразбаева У.М. Анализ движения наноспутника SamSat-218Д по траекторным измерениям // Вестник Самарского университета. Аэрокосмическая техника, технологии и машиностроение. 2019. Т. 18. № 4. С. 18-28.
- Bernal C.A., van Bolhuis M. Releasing the cloud: a deployment system design for the QB50 cubesat mission // Proceedings of 26th Annual AIAA/USU Conference on Small Satellites, 2012. Режим доступа: https://digitalcommons.usu.edu/ cgi/viewcontent.cgi ?article = 1054&context =smallsat (дата обращения 01.10.2021 г.).
- Белоконов И.В., Ломака И.А. Методика параметрической идентификации модели углового движения наноспут-ника // Космонавтика и ракетостроение. 2020. № 6. С. 134-145.
- Johnson N.L., Kotz S., Balakrishnan N. Continuous univariate distributions. V. 1. 2nd Edition. New York: Wiley, 1994. 784 p.
- Belokonov I.V., Lomaka I.A. Methodology for identifying the parameters of a mathematical model of the angular motion of a nanosatellite under a priori uncertainty // Proceedings of the International Astronautical Congress, IAC. 2020. V. October 2020.
- Belokonov I.V., Lomaka I.A. In-flight calibration of nanosatellites inertia tensor: The algorithm and requirements for on-board sensors // Proceedings of the International Astronautical Congress, Bremen, Germany. 2018. V. October 2018.
