К вопросу построения контура обратной связи микромеханического гироскопа

Автор: Шадрин Ю.В., Грязин Д.Г., Ковалв А.С., Лычв Д.И.
Журнал: Научное приборостроение @nauchnoe-priborostroenie
Рубрика: Исследования, приборы, модели и методы анализа
Статья в выпуске: 2 т.17, 2007 года.
Бесплатный доступ
Рассматриваются вопросы применения в системе управления микромеханическим гироскопом обратных связей по скорости и по углу отклонения ротора. Исследования проводятся методом теоретического и экспериментального моделирования. Показано, что позиционная обратная связь расширяет частотный диапазон датчика, а управление по производной позволяет существенно уменьшить влияние вибрации основания на выходной сигнал.
Короткий адрес: https://sciup.org/14264486
IDR: 14264486 | УДК: 53.087.92:
On the creation of micromechanical gyroscope feedback loop
The paper considers the problems of the sensing element position and velocity feedbacks used in the micromechanical gyro control system. The analysis was carried out by the methods of theoretical and experimental simulation. It has been shown that the positional feedback extends the frequency band of the sensor. The velocity feedback reduces the effect of base vibrations on the output signal.
Текст научной статьи К вопросу построения контура обратной связи микромеханического гироскопа
Тенденция миниатюризации датчиков привела к появлению нового класса преобразователей угловой скорости, которые принято называть мик-ромеханическими гироскопами (ММГ). ФГУП ЦНИИ "Электроприбор" в течение нескольких лет занимается разработкой отечественного серийного кремниевого микромеханического гироскопа [15]. Опыт, накопленный в области исследования разомкнутых систем, позволил перейти к созданию замкнутой системы регулирования ММГ.
Технические решения, связанные с выбором корректирующих звеньев и структуры контуров управления, являются определяющими при обеспечении необходимых динамических характеристик датчиков. Обычно в контурах управления ММГ применяют позиционную обратную связь и обратную связь по скорости изменения выходного сигнала. Позиционная обратная связь является традиционной для контуров управления датчиков измерения механических величин. Она позволяет расширить их частотный и увеличить динамический диапазоны измерения. При этом в случае работы ММГ в условиях вибрации, а также при условии остаточного дебаланса ротора его выходной сигнал будет отягощен дополнительным шумом. Обратная связь по скорости позволяет создать систему, свободную от этого недостатка.
ОБЪЕКТ ИССЛЕДОВАНИЯ
Подробное описание разработанного ММГ приведено в [1]. Учитывая что стабильность первичных колебаний обеспечивается системой возбуждения, будем рассматривать только динамику выходных (вторичных) колебаний чувствительного элемента ММГ. В первом приближении она описывается дифференциальным уравнением а + 22гоа + го 2а = —кор (), (1)
Jx где а — угол отклонения ротора по оси вторичных колебаний, ^ — степень успокоения, го — собственная частота колебательного контура, Мкор — кориолисов момент, Jx — момент инерции по оси вторичных колебаний.
Амплитуда колебаний измеряется с помощью датчика угла, состоящего из емкостной системы, образованной ротором и электродами на крышке, и преобразователя емкость—напряжение, включенного по дифференциальной схеме. Для создания компенсирующих моментов в конструкции также предусмотрены электростатические датчики момента.
Рассмотрим линейную задачу, в которой датчики угла и момента представляются безынерционными звеньями:
U -К -а, ду ду ’
М ос = K дм • U дм ,
где U ду — напряжение на выходе датчика угла; K ду — коэффициент датчика угла; а — угол отклонения ротора; М ос — компенсирующий момент; K дм — коэффициент датчика момента; U дм — напряжение на датчике момента. Будем считать, что все напряжения и углы не имеют ограничения по амплитуде.
Учитывая высокую добротность системы, обусловленную глубоким вакуумированием рабочей полости датчика, амплитудно-частотная характеристика (АЧХ) колебательного контура будет иметь достаточно высокий пик (рис. 1). При этом в случае, когда частота первичных колебаний меньше собственной частоты выходного контура на величину, превышающую требуемую полосу
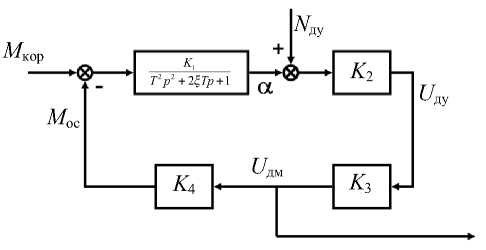
Рис. 2. Блок-схема контура обратной связи по углу
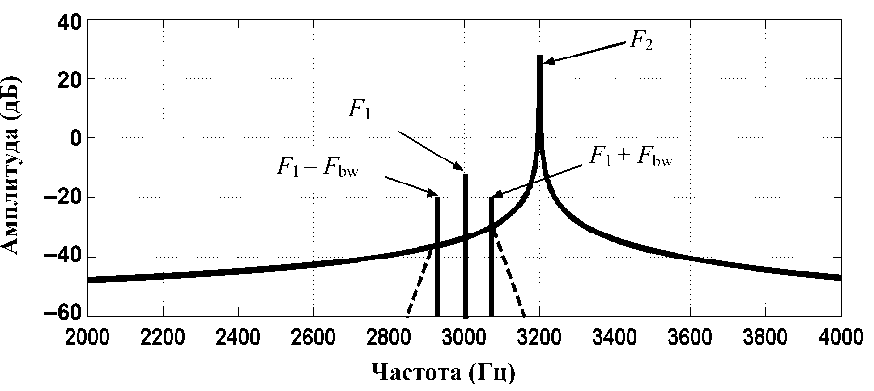
Рис. 1. АЧХ выходного колебательного контура.
F 1 — частота первичных колебаний, F 2 — собственная частота выходного колебательного контура, F bw — требуемая полоса пропускания датчика
пропускания датчика, вредные составляющие (колебания на собственной частоте из-за переходных процессов, вибрации и т. д.) будут отфильтрованы в процессе синхронной демодуляции (рис. 1).
Очевидно, что в случае работы в разомкнутом режиме изначальное разнесение собственных частот первичного и вторичного контуров позволяет получить требуемую полосу пропускания и отфильтровать помехи, вносимые колебаниями на частоте F2. Однако большие уровни вибраций (линейных или угловых) могут приводить к тому, что амплитуда колебаний на частоте F2 превысит допустимую величину, определяемую зазором между ротором и крышкой. Это может повлечь за собой срыв первичных колебаний или "залипание" ротора в отклоненном положении (если в конструкции не предусмотрены специальные ограничи- вающие элементы). Таким образом, одной из задач, решаемых при введении обратной связи в ММГ, является повышение виброустойчивости датчика. Это может достигаться путем силовой компенсации отклонений ротора ММГ от нулевого положения либо демпфированием системы (обратная связь по производной).
ОБРАТНАЯ СВЯЗЬ ПО УГЛУ
Рассмотрим вариант силовой компенсации, когда напряжение на датчиках момента по оси вторичных колебаний формируется пропорционально углу отклонения ротора и одновременно является выходным сигналом гироскопа (рис. 2).
На рис. 2 обозначены: M кор — момент кориолисовых сил; M ос — компенсирующий момент; N ду — аддитивный шум преобразователя емкость-напряжение; K 1 , T £ — коэффициенты колебательного контура, описывающего динамику выходных колебаний ротора ММГ; а — угол отклонения ротора ММГ по оси вторичных колебаний; K 2 — коэффициент преобразования емкостного датчика угла; K 3 — коэффициент обратной связи; K 4— коэффициент датчика момента; U ду— напряжение на выходе датчика угла; U дм — напряжение, подаваемое на датчик момента.
Передаточные функции такой системы будут иметь следующий вид:
— по полезному сигналу
W М кор U дм
K 1 K 2 K 3
1 + K 1 K 2 K 3 K 4
T2 p2 + 2 ^ Tp
1 + K 1 K 2 K 3 K 4 1 + K 1 K 2 K 3 K 4
— по ошибке
WN дм
K 2 K 3
1 + K 1 K 2 K 3 K 4
(T 2 p 2 + 2 ^ Tp + 1)
T 2 p 2 2 ^ Tp
1 + K 1 K 2 K 3 K 4 1 + K 1 K 2 K 3 K 4
ного эффекта, т. к. вместе с ростом коэффициента преобразования системы наблюдается рост коэффициента преобразования по шумам преобразователя емкость—напряжение.
ОБРАТНАЯ СВЯЗЬ ПО СКОРОСТИ
Рассмотрим вариант замкнутого контура ММГ при введении демпфирующей обратной связи. При этом на датчики момента подается напряжение, пропорциональное производной от угла отклонения ротора ММГ, а выходом системы является напряжение на датчике угла (рис. 6).
На рис. 3 показаны амплитудно-частотные характеристики разомкнутой и замкнутой систем при различных значениях коэффициента обратной связи. При расчетах и моделировании использованы следующие значения параметров ММГ:
-
— момент инерции по оси вторичных колебаний J = 5.35 • 10 - 13 кг-м2;
-
— собственная частота вторичного колебательного контура to = 3200 Гц ;
-
— жесткость упругого подвеса по оси вторичных колебаний С = J • to 2 = 2.2 • 10 - 4 Н^м/рад;
-
— добротность вторичного колебательного контура Q = 10000;
— степень успокоения вторичного колебательного контура ^ = 0.00005 .
На рис. 3 видно, что увеличение коэффициента обратной связи существенно увеличивает собственную частоту замкнутого контура, также как и коэффициент передачи. Учитывая что нас интересует коэффициент передачи системы на частоте первичных колебаний (3000 Гц), построим зависимость данного коэффициента от коэффициента обратной связи (рис. 4).
Оценим влияние обратной связи по углу на прохождение шума преобразователя емкость-напряжение к выходу системы. Для этого построим амплитудно-частотные характеристики (рис. 5) системы, входом которой является N ду (см. рис. 2), а выходом — U дм .
Анализ представленных характеристик показывает, что на собственной частоте механической системы имеется резкое снижение характеристики, которая однако идет вверх с ростом коэффициента обратной связи. Из рисунка видно, что уже при коэффициенте, равном 10, коэффициент преобразования по шуму на частоте 3000 Гц превышает уровень шума разомкнутой системы.
Таким образом, можно сделать вывод, что при исходных параметрах ММГ введение обратной связи по углу не даст существенного положитель-
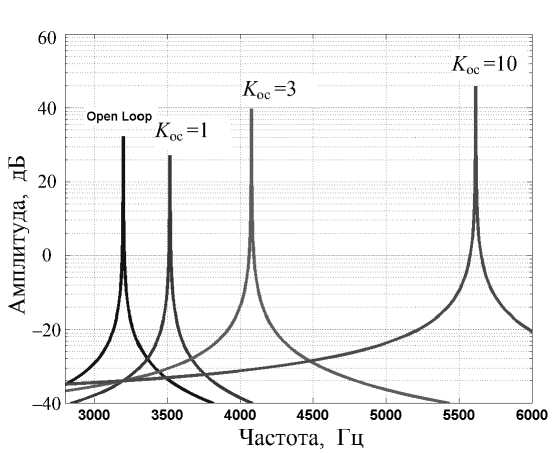
Рис. 3. АЧХ при различных значениях коэффициента ОС по углу
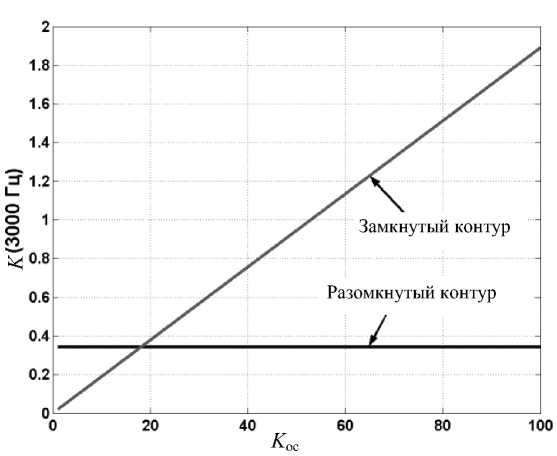
Рис. 4. Коэффициент передачи системы на частоте первичных колебаний
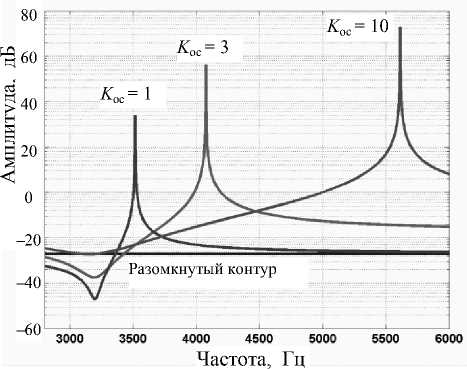
Рис. 5. АЧХ по шумам при различных значениях коэффициента ОС по углу
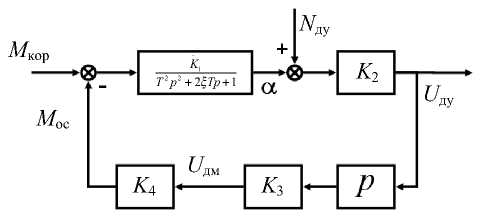
Рис. 6. Блок-схема контура обратной связи по скорости
Амплитудно-частотные характеристики (рис. 7), полученные при различных значениях коэффициента обратной связи по скорости показывают возможность снижения резонансного пика по оси вторичных колебаний без существенной потери в чувствительности ММГ. Так, при значении K ос = = 0.00002 добротность системы снизилась в 1000 раз относительно разомкнутого контура, при этом коэффициент передачи на частоте 3000 Гц уменьшился незначительно.
Для оценки влияние обратной связи по скорости на прохождение шума преобразователя емкость-напряжение к выходу системы были построены амплитудно-частотные характеристики системы (рис. 8), входом которой является N ду , а выходом — U ду (см. рис. 2).
Из рис. 8 видно, что при ведении обратной связи по скорости, как и в предыдущем случае, снижение коэффициента передачи по шумам компенсируется уменьшением общего коэффициента передачи системы на частоте 3000 Гц.
ЭКСПЕРИМЕНТАЛЬНЫЕ ИССЛЕДОВАНИЯ
С целью повышения виброустойчивости контур обратной связи ММГ с управлением по скорости был реализован в экспериментальных образцах, разработанных в ЦНИИ "Электроприбор" [6]. На рис. 9 представлены зависимости коэффициента преобразования и уровня шумов ММГ от величины коэффициента обратной связи по производной,
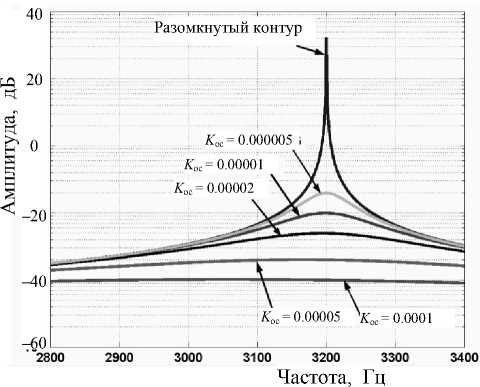
Рис. 7. АЧХ при различных значениях коэффициента ОС по скорости
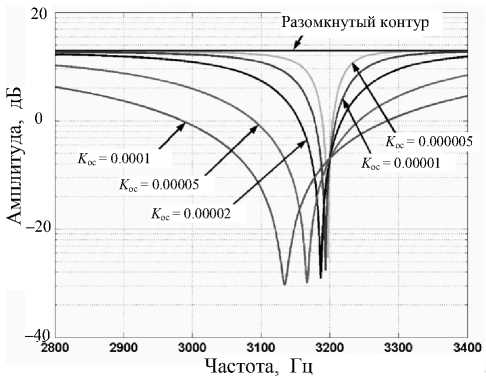
Рис. 8. АЧХ по шумам при различных значениях коэффициента ОС по скорости
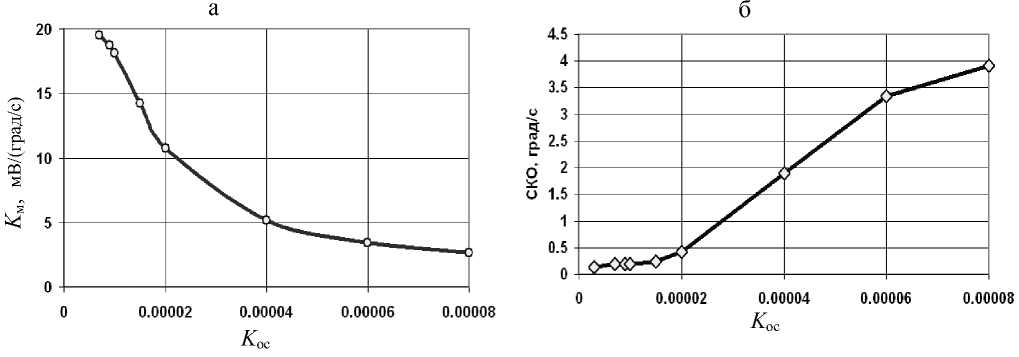
Рис. 9. Экспериментальные зависимости от коэффициента обратной связи: а — коэффициента преобразования, б — уровня шумов
а б
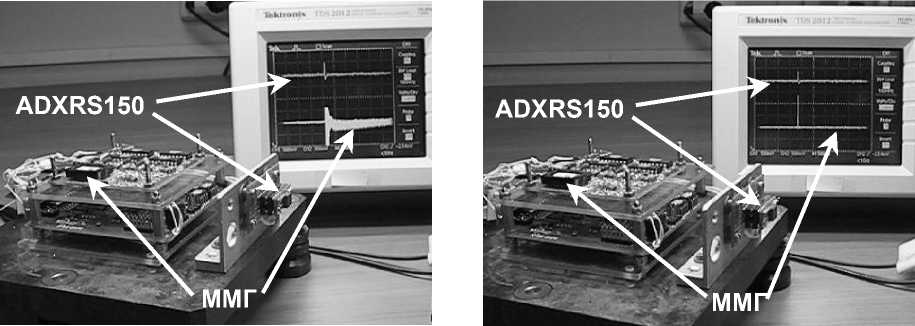
Рис. 10. Реакция на ударное воздействие ММГ: без обратной связи (а) и с обратной связью (б)
полученные экспериментально. Из рисунков видно увеличение соотношения сигнал-шум в области малых значений коэффициента обратной связи. Эта область соответствует близости частот первичных и вторичных колебаний. Рассогласование частот при увеличении коэффициента обратной связи объясняется наличием в выходном канале ММГ так называемой квадратурной помехи.
На рис. 10 представлен выходной сигнал ММГ ЦНИИ "Электроприбор" при ударном воздействии в сравнении c гироскопом фирмы Analog Devices ADXRS150. Видно, что разработанный гироскоп без обратной связи имеет длительный переходный процесс (рис. 10, а), который осложняет работу системы управления в случае его использования на высокодинамичном объекте. Введение обратной связи по скорости позволило сократить время переходного процесса чувствительного элемента (рис. 10, б), тем самым повысив его виброустойчивость.
ВЫВОДЫ
Результаты проведенных исследований позволяют сделать следующие выводы.
-
1. Реализация контуров позиционной обратной связи и управления по производной не оказывает существенного влияния на соотношение сигнал-шум в рамках линейной задачи.
-
2. Введение в контур управления позиционной
-
3. Реализация в системе управления обратной связи по скорости позволяет уменьшить влияние вибрации на выходной сигнал датчика при существенном демпфировании его собственных колебаний по выходной координате.
обратной связи позволяет расширить полосу пропускания гироскопа при сохранении уровня шумов разомкнутой системы.
Исследования выполнены при поддержке гранта РФФИ 06-08-01610
