К вопросу прогнозирования технического состояния жидкостных ракетных двигателей малой тяги

Автор: Комлев Г. В., Митрофанова А. С.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Авиационная и ракетно-космическая техника
Статья в выпуске: 1 т.21, 2020 года.
Бесплатный доступ
В стремительно развивающейся ракетно-космической отрасли создаются космические аппараты, снабжённые жидкостными ракетными двигателями малых тяг. К данному типу ракетных двигателей предъявляются высокие требования по надёжности, эффективности и экономичности использования топлива. Для обеспечения мониторинга характеристик космических аппаратов используют систему функциональной диагностики, в состав которой входят средства телеметрии и аналитической обработки данных. Телеметрия выполняет функции получения и передачи информации. Обработка информации выполняется в вычислительных центрах, находящихся на космическом аппарате и Земле. Наиболее перспективным вычислительным инструментом, способным проводить прогнозирование временных рядов и классифицировать большой объём взаимосвязанных данных, считают искусственную нейронную сеть. В связи с этим предметом исследований в работе являются способы обработки данных с применением искусственной нейронной сети. Цель работы заключается в разработке метода прогнозирования технического состояния жидкостных ракетных двигателей малых тяг с использованием искусственной нейронной сети. Во введении обосновывается актуальность исследований по использованию нейросети в системе функциональной диагностики жидкостных ракетных двигателей малых тяг для космических аппаратов. В основной части проводится анализ множества телеметрических данных ракетного двигателя и определена их весомость при прогнозе основных диагностических параметров. В качестве диагностических параметров предложено использовать тягу, удельный импульс и температуру конструкции. Исследованы прогностические возможности нейросети и разработана принципиальная схема метода прогнозирования технического состояния жидкостного ракетного двигателя малой тяги. В разработанном методе на первом этапе нейросеть выполняет аппроксимацию функции и экстраполяцию временного ряда данных телеметрических данных, на втором - определяет вероятный класс технического состояния двигателя. В выводах намечен план дальнейших экспериментальных исследований в данной области и даются рекомендации по разработке и совершенствованию алгоритмов функционирования искусственных нейронных сетей в составе системы функциональной диагностики космического аппарата. В силу обобщённого характера методических схем, результаты работы могут применяться к любому типу ракетных двигателей и использоваться на всех предприятиях ракетно-космической отрасли соответствующего профиля.
Ракетный двигатель, телеметрия, нейросеть, диагностический параметр, аппроксимация, классификация, прогнозирование
Короткий адрес: https://sciup.org/148321956
IDR: 148321956 | УДК: 629.07.058 | DOI: 10.31772/2587-6066-2020-21-1-78-84
To the question of forecasting the technical condition of low-thrust liquid rocket engines
In the rapidly developing space and rocket industry, spacecrafts are being equipped with low-thrust liquid rocket engines. Нigh requirements are imposed on the reliability, efficiency and economy of fuel use for this type of rocket engine. To ensure monitoring of the characteristics of spacecrafts, a functional diagnostic system is used, which includes telemetry and analytical data processing. Telemetry performs the functions of receiving and transmitting information. Information processing is carried out in computer centers located on the spacecraft and the Earth. The most promising computing tool capable of predicting time series and classifying a large amount of interconnected data is considered an artificial neural network. In this regard, the subject of research in the work is data processing methods based on an artificial neural network. The purpose of the work is to develop a method for forecasting the technical condition of low-thrust liquid rocket engines using an artificial neural network. The relevance of research on the use of a neural network in the system of functional diagnostics of low-thrust liquid rocket engines for spacecraft is explained in the introduction. In the main part, an analysis of many telemetric data of the rocket engine is carried out and their strength in the forecast of the main diagnostic parameters is determined. It is proposed to use traction, specific impulse, and temperature of the structure as diagnostic parameters. The prognostic capabilities of the neural network were investigated and a schematic diagram of a method for predicting the technical condition of a low-thrust liquid rocket engine was developed. In the developed method, at the first stage, the neural network performs the approximation of the function and extrapolates the time series of telemetric data; the second stage determines the probable class of the technical condition of the engine. The conclusion outlines a plan for further experimental research in the study area and provides recommendations on the development and improvement of algorithms for functioning of artificial neural networks as part of the functional diagnostics system of the spacecraft. Due to the generalized nature of the methodological schemes, the results of the work can be applied to any type of rocket engines and used at all enterprises of the rocket and space industry of the corresponding profile.
Текст научной статьи К вопросу прогнозирования технического состояния жидкостных ракетных двигателей малой тяги
Введение. Данная статья продолжает работы [1; 2], в которых была рассмотрена задача балансировки в динамическом режиме с обеспечением минимального смещения центра масс с геометрической оси, стабилизированной вращением конической летающей модели (ЛМ), конус корпуса которой характеризуется малым полууглом раствора. Балансировка выполняется на заключительном этапе общей сборки модели. В соответствии с алгоритмом, приведённым в [1], модель балансируется в составе сборного ротора, на низкочастотном динамическом балансировочном стенде с газовыми опорами и вертикальной осью вращения [3; 4]. Процесс балансировки предполагает определение и последующее приведение параметров массо-инерционной асимметрии модели, к числу которых относится величина поперечного смещения центра масс с геометрической оси и угол отклонения продольной главной центральной оси инерции (ГЦОИ) относительно той же оси [5; 6] к значениям, не превышающим заданных в эксплуатационной документации на модель предельно-допустимых значений. Наличие единственной плоскости коррекции не позволяет полностью совместить продольную ГЦОИ с геометрической осью ЛМ, обычно выбираемой в качестве строительной оси. Вариант балансировки с оптимизацией по критерию достижения минимально возможного для конкретной конструкции ЛМ смещения центра масс обычно выбирают, учитывая существенное влияние данного параметра на лётно-технические характеристики модели [7].
Приведение параметров к заданным нормативам выполняется путём корректировки массы модели, для чего к штатной плоскости коррекции модели, которая у конических ЛМ, как правило, располагается на торце (или вблизи торца), на значительном расстоянии от её центра масс прикрепляют балансировочный груз. При этом масса и угловое положение балансировочного груза рассчитывается по результатам измерений векторов дисбалансов , действующих в двух - в верхней (штатной) и нижней (далее обозначаемых соответственно индексами В и Н) - плоскостях коррекции сборного ротора, в состав которого входит контролируемая модель [8; 9]. В качестве нижней плоскости коррекции используется нижний торец специализированного технологического переходника, внутри которого (вертикально, носком вниз) устанавливается ЛМ. Измерения амплитуд и фаз вибраций верхней и нижней опор, пропорциональных значениям и углам векторов дисбалансов, действующих В , проводят на выбеге сборного ротора, на постоянной рабочей частоте вращения [10; 11]. Методика предполагает сначала - приведение контролируемой ЛМ расчётным путём в состояние квазистатической неуравновешенности, а затем - моделировании состояния моментной неуравновешенности (исключающей поперечное смещение центра масс) с расчётом предполагаемого угла перекоса продольной ГЦОИ относительно геометрической оси модели. В случае если этот угол не превышает предельно-допустимого значения, то рассчитывают параметры балансировочного груза и проводят корректировку массы ЛМ. А если превышает, то рассчитывают предполагаемую (одновременно являющуюся минимально возможной для данного варианта компоновки модели) величину поперечного смещения центра масс, задавая значение угла перекоса продольной ГЦОИ равным предельно-допустимому значению. Если при этом предполагаемый угол перекоса продольной ГЦОИ не превышает заданного предельнодопустимого значения, то рассчитывают параметры балансировочного груза и проводят корректировку массы ЛМ. В ином случае балансировку прекращают, а ЛМ отправляют изготовителю на перекомпоновку. Методика защищена патентом РФ № 2499985 [12].
Однако существуют летающие модели, в том числе обладающие конической формой корпуса, для обеспечения динамической устойчивости и, соответственно, эффективности эксплуатации которых более предпочтительным является минимизация именно перекоса продольной ГЦОИ относительно геометрической оси (при одновременном выполнении заданного норматива по величине поперечного смещения центра масс). В данной статье предлагается рассмотреть модификацию алгоритма балансировки ЛМ [7; 12], которая ориентирована на решение задачи балансировки с приведения параметров массо-инерционной асимметрии к значениям, не превышающим заданных предельно-допустимых значений этих параметров, но с оптимизацией по критерию достижения минимально возможного для контролируемой конструкции перекоса продольной ГЦОИ относительно геометрической оси модели. Рассматривается вариант задачи, когда имеется априорная информация о массе, продольном положении центра масс относительно обеих плоскостей коррекции и моментах инерции контролируемой модели, полученной с использованием другого оборудования и средств измерений [8; 13; 14], а также о балансировочных коэффициентах измерительной системы, полученной при настройке стенда на объект контроля с использованием пробных грузов [15; 16].
Алгоритм балансировки. Предлагаемый алгоритм предполагает выполнение двух пусков сборного ротора в исходном состоянии – с поворотом ЛМ на 180о вокруг геометрической оси внутри технологического переходника. По результатам измерений вибраций опор вычисляют параметры начальных дисбалансов DНАЧ и DНАЧ , действующих в плоскостях коррекции, а также рассчитывают начальные параметры радиуса-вектора р поперечного смещения центра масс и вектора-угла перекоса продольной ГЦОИ модели агл относительно её геометрической оси по формулам [15]
Р
НАЧ НАЧ
(НАЧ _ D B + D H
M
;
НАЧ аГЛ
НАЧ НАЧ
-
1 . 2 ( D B x B D H x H )
= — arcsin —------------------
-
2 A Z
где M - масса модели; AZ = I3 - Ia - разность между экваториальным Z3 и аксиальным 1а моментами инерции модели; x и x – расстояния от центра масс модели до верхней и нижней плоскости коррекции соответственно. Затем в случае, если начальное значение хотя бы одного из параметров, характеризующих асимметричность в начальном распределении масс ЛМ, превышает соответствующее предельно-допустимое значение рдоп или аглдon, заданное в эксплуатационной документации на модель, проводят балансировочный расчёт. В процессе расчёта имитируется действие дисбалансов в плоскостях коррекции, моделирующих промежуточные состояния неуравновешенности ЛМ. Результатом расчёта является либо определение массы и угла установки балансировочного груза, прикрепление которого к штатной плоскости коррекции позволяет скорректировать массу ЛМ, обеспечивая приведение значений контролируемых параметров заданным нормативам с оптимизацией по критерию достижения минимального возможного угла перекоса продольной ГЦОИ относительно геометрической оси модели, либо доказательство невозможности обеспечения одновременно двух контролируемых параметров массо-инерционной асимметрии для данной компоновки модели по заданным нормативам [7].
На первом шаге алгоритма балансировочного расчёта предполагается перевод ЛМ в режим квазистатической неуравновешенности, т. е. когда её геометрическая ось и продольная ГЦОИ пересекаются, но не в центре масс. Это позволяет при проведении дальнейших расчётов оперировать исключительно коллинеарными векторами дисбалансов, действующими в противоположных плоскостях коррекции. Для перевода ЛМ в режим квазистатической неуравновешенности следует устранить действие начального дисбаланса в верхней (штатной) плоскости коррекции, задав в ней, как было показано в [2], компенсирующий дисбаланс DКОМП , равный по значению, но противоположный по направлению начальному дисбалансу DНАЧ . При этом в нижней плоскости коррекции в соответствии с рисунком будет сформирован дополнительный дисбаланс DДПЛ1 , направленный противоположно дисбалансу DКОМП , значение которого определяется выражением
ДПЛ 1 КОМП
DH — DB * КНВ , где К – коэффициент влияния верхней плоскости коррекции на нижнюю плоскость коррекции при наличии дисбаланса в верхней плоскости коррекции, определяемый экспериментально в процессе предварительной настройки стенда [15–17]. Появление дисбаланса DДПЛ1, в свою очередь, обусловит формирование дисбаланса DКОМП , равного геометрической сумме дисбалансов DДПЛ1 и DНАЧ , взамен дисбаланса DНАЧ в нижней плоскости коррекции в соответствии с выражениями
КОМП НАЧ 2 ДПЛ 12 НАЧ ДПЛ 1 НАЧ ДПЛ 1
D H — ^ ин + D H + 2D H D H cos ( P h - P h ) ;
КОМП
P h
sin p1^ + sin в ДПЛ 1
— arctg иНАЧ оППЛ 1 , cos pH + cos pH
где в НАЧ и в ДПЛ 1 — фазовые углы дисбалансов D НА Ч и D Д ПЛ 1 соответственно. При этом, поскольку в верхней плоскости коррекции дисбаланс будет отсутствовать, то продольная ГЦОИ будет пересекаться с геометрической осью, а поперечное смещение центра масс ЛМ будет характеризоваться значением
КОМП
Р
КОМП
DН
M
На втором шаге следует смоделировать перевод ЛМ в режим статической неуравновешенности, т. е. когда продольная ГЦОИ параллельна геометрической оси и перекос между этими осями отсутствует. Для этого в штатной плоскости коррекции необходимо задать корректирующий дисбаланс DКОРР , в соответствии с рисунком, сонаправленный дисбалансу DКОМП и определяемый формулой
КОРР
DВ
КОМП DН
1 + К НВ
НВ
При этом в нижней плоскости коррекции будет сформирован дополнительный дисбаланс DДПЛ 2 , направленный противоположно дисбалансу DКОРР и определяемый выражением
ДПЛ 2 КОРР
D H D B К НВ .
Это, в свою очередь, обусловит формирование в нижней плоскости коррекции дисбаланса DКОРР (взамен дисбаланса DКОМП ), равного сумме противоположно направленных дисбалансов DКОМП и DДПЛ 2. Значение дисбаланса D КОРР будет определяться выражением
КОРР КОМП ДПЛ 2
HНН
.
Равенство значений эквиполентных дисбалансов DКОРР и DКОРР обеспечивает исключение перекоса продольной ГЦОИ относительно геометрической оси и перевод ЛМ в режим статической неуравновешенности. При этом рассчитать предполагаемую величину остаточного поперечного смещения центра масс с геометрической оси ЛМ, которая появится в результате устранения поперечного смещения центра масс, можно по формуле
КОРР
2 D КОРР
М
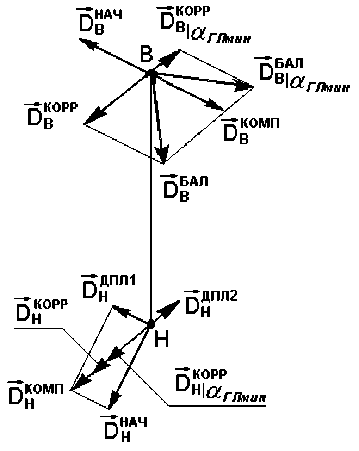
Диаграмма балансировочного расчёта
Diagram of counterbalancing calculation
В случае выполнения условия ρ КОРР ≤ ρ , определяют значение D БАЛ и угловое положение
БАЛ БАЛ
αБАЛ вектора балансировочного дисбаланса DВ , используя соответствующие параметры смоделированных в штатной плоскости коррекции В векторов дисбалансов DКОРР и DКОРР
БАЛ
.
Рассчитать параметры балансировочного вектора D В , в соответствии с рисунком, представляющего собой геометрическую сумму дисбалансов DКОМП и DКОРР , можно по формулам
БАЛ DВ
КОМП 2 DВ
КОРР 2 КОМП КОРР КОМП КОРР
+ db + 2 db db cos ( а - a ) ;
а БАЛ = arctg
sin « КОМП + sin а КОР' ВВ
КОМП КОРР , cos а + cos а
где аК°МП и аКОР’ - фазовые углы дисбалансов DК°МП и DКОРР соответственно. Тогда для случая аГПост = 0, pocn, = рКОРр < рдоп рассчитать массу балансировочного груза по формуле
БАЛ тБАЛ
DВ rB
при этом угол установки балансировочного груза на верхней (штатной) плоскости коррекции
БАЛ БАЛ
ФБАЛ будет совпадать с фазовым углом ав дисбаланса Dв .
Далее проводят корректировку массы ЛМ, прикрепив балансировочный груз к балансировочной плоскости В, обеспечивая тем самым приведение обоих параметров массоинерционной асимметрии к значениям, не превышающим предельно-допустимых значений. При этом устраняется перекос продольной ГЦОИ относительно геометрической оси. Однако в случае, если значение рКОРР будет превышать предельно-допустимое значение рдо)t, то следует рассчитать предполагаемое минимально возможное значение угла отклонения продольной ГЦОИ относительно геометрической оси а^ин, которое может быть достигнуто путем изменения дисбаланса в плоскости коррекции В при уменьшении величины поперечного смещения центра масс ЛМ до предельно-допустимого значения рп, по формуле
КОМП
(Едоп._____Н__2 rY +к y \_п™х агЛмин = arc sin2
, г- ( х в + К НВ х Н 2 D H х Н
М
В случае если полученное значение аГЛмин будет превышать заданное предельно-допустимое значение аглдон, балансировочный эксперимент прекращают, а ЛМ бракуют и направляют изготовителю на перекомпоновку ввиду доказанного расчётом отсутствия возможности одновременного приведения величины смещения центра масс и угла отклонения продольной ГЦОИ относительно геометрической оси к значениям, не превышающим заданных предельнодопустимых значений. В ином случае, то есть если неравенство |аГЛи<0Олдоп окажется верным, то определяют значение вектора дисбаланса DКОРР , обеспечивающего достижение минимального значения \агл»шн\ при установке смещения центра масс, равного роп, по формуле
КОРР
В\а ГЛмин
КОМП
Р допМ - D H
1 - Кнв
НВ
при этом положительный результат расчёта будет означать, что направления этих дисбалансов
КОРР
В1 а ГЛмин
и DКОРР совпадают, а отрицательный – наоборот, что их направления противоположны.
Ввиду взаимовлияния плоскостей коррекции, в плоскости коррекции Н появится дисбаланс, DКОРР , сонаправленный дисбалансу DКОМП , значение которого определяют по формуле
КОРР КОМП ДПЛ 3
DH Оглмн« = DH + DH ’ где DДПЛ3 – есть значение дополнительного дисбаланса DДПЛ3 (на рисунке не показан), появляющегося в плоскости коррекции Н как следствие от действия дисбаланса DКОРР в плоскости коррекции В и противоположно направленного дисбалансу DКОРР . DДПЛ3 определяется по формуле
ДПЛ 3 DН
КОРР
DB О т-нн К™ '
Затем определяют значение D БАЛ и угловое положение а БАЛ вектора балансировочного дисбаланса DБАЛ , используя соответствующие параметры смоделированных в балансировочной плоскости коррекции В векторов дисбалансов DКОРР и DКОМП . После чего определяют массу балансировочного груза m , установку которого производят в угловом положении, соответствующем угловому положению дисбаланса DБАЛ . Для определения значения балансировочного дисбаланса, массы и угла установки балансировочного груза используют формулы
БАЛ
В\ а ГЛмин
КОМП 2 КОРР 2 КОМП КОРР КОМП
D B + D B а гл_ + 2 D B D B а™„„ • cos ( О
—
КОРР a B 0^ ) ,
КОРР где а^аг^ - угловое положение дисбаланса Dв^гл ;
аБАЛ = arctg
B \ a ГЛмин
sin а КОМ' + sin ОКОР
________B__________________ B\ а ГЛмин .
КОМП КОРР ;
Cos a B + cos a B а 1^лм1нн
БАЛ
БАЛ _ DB ^г^лмлинн
B\аГЛмнн r rB
После чего проводят корректировку массы ЛМ, прикрепив балансировочный груз к балансировочной плоскости В, обеспечивая совпадение углов установки балансировочного груза и вектора балансировочного дисбаланса, и выполняют контрольный пуск сборного ротора для подтверждения правильности проведённого расчёта. По результатам контрольного пуска определяют параметры остаточных дисбалансов DОСТ и DОСТ , действующих в соответствующих плоскостях коррекции после установки балансировочного груза, и рассчитывают (пренебрегая массой балансировочного груза как заведомо практически несущественной по сравнению с массой контролируемой ЛМ) остаточные параметры массоинерционной асимметрии по формулам:
ОСТ ОСТ
-* ОСТ _ D B + D H
M
ОСТ аГЛ
ОСТ ОСТ
-
1 . 2 ( D B x B D H x H )
= — arcsin —-----------------
-
2 A Z
Работоспособность рассмотренного алгоритма можно оценить на конкретном числовом примере.
Пример расчета балансировочного груза. Проведём расчёт балансировки ЛМ при следующих значениях параметров задачи:
– масса модели М = 100000 г;
– расстояние от центра масс ЛМ до верхней плоскости коррекции x = 570 мм;
– радиус верхней плоскости коррекции r = 200 мм;
– расстояние от центра масс до нижней плоскости коррекции x = 800 мм;
– разность между экваториальным и аксиальным моментами инерции Δ I = 8,5·109 г·мм2;
- предельно-допустимое значение поперечного смещения центра масс роп = 0,1 мм;
- предельно-допустимое значение угла перекоса ГЦОИ аглдоп = 10' ~ 0,166667°;
– коэффициент влияния верхней плоскости коррекции на нижнюю плоскость коррекции при наличии дисбаланса в верхней плоскости коррекции К НВ = 0,3;
– начальный дисбаланс в верхней плоскости коррекции DНАЧ = 25000 г·мм, фазовый угол a f 4 = 80°;
В
– начальный дисбаланс в нижней плоскости коррекции DНАЧ = 10000 г·мм, фазовый угол
1Г и (2):
–
–
= 115°, откуда начальные значения параметров асимметрии масс ЛМ в соответствии с (1)
рНАЧ = 0,34 мм; 0^ = 3,62 ' .'
Поскольку обнаружено, что начальные значения параметров массо-инерционной асимметрии превышают заданные предельно-допустимые значения, проведём балансировочный расчёт для достижения условий
ОСТ а ГЛ р оС
а гЛмин ^ Р доп .
— аГЛдоп ;
Переведём ЛМ в состояние квазистатической неуравновешенности, для чего введём дисбаланс DКОМП с параметрами DКОМП = 25000 г^мм, фазовый угол а^омп = 260°, компенсирующий действие начального дисбаланса DНАЧ в верхней плоскости коррекции. В нижней плоскости коррекции появится дополнительный дисбаланс DДПЛ1 , значение которого в соответствии с (3) составит DДПЛ1 = 7500 г·мм, а фазовый угол βДПЛ1 = 80°. Дисбаланс DДПЛ1 в сумме с дисбалансом DНАЧ в соответствии с (4) и (5) сформирует в нижней плоскости коррекции дисбаланс DКОМП с параметрами: D КОМП = 16707 г·мм, фазовый угол βКОМП = 97,5°. Откуда поперечное смещение центра масс ЛМ в соответствии с выражением (6) составит ρКОМП = 0,167 мм, что превышает заданное значение ρ несмотря на наличие перекоса продольной ГЦОИ также.
Используя (7), рассчитаем параметры корректирующего дисбаланса DКОРР , действие которого в верхней плоскости коррекции позволит устранить перекос продольной ГЦОИ относительно геометрической оси контролируемой летающей модели: D КОРР = 12851,5 г·мм, фазовый угол α КОРР = 97,5°. При этом в нижней плоскости коррекции, согласно (8), сформируется новый дополнительный вектор дисбаланса DДПЛ 2 , обусловленный взаимовлиянием плоскостей коррекции с параметрами: D ДПЛ 2 = 3855,5 г·мм, фазовый угол
β ДПЛ 2 = 277,5°. Это, в свою очередь, плоскости коррекции дисбаланса DКОРР β КОРР = 97,5°.
в соответствии
с параметрами:
с (9), вызовет появление в нижней D КОРР = 12851,5 г·мм, фазовый угол
Для условия α КОРР = 0, вытекающего из равенства значений сонаправленных векторов дисбалансов DКОРР и DКОРР , предполагаемое поперечное смещение центра масс с геометрической оси ЛМ в соответствии с выражением (10) составит значение ρ КОРР = 0,257 мм, что превышает заданное предельно допустимое значение ρ .
С использованием выражения (14) рассчитаем минимальный угол перекоса продольной ГЦОИ α , не превышающий значения α , при котором для данной конструкции ЛМ возможно обеспечить величину поперечного смещения центра масс, равную ρ . В результате расчёта получим: α = –8,5 ' , т. е. неравенство α ≤ α окажется верным. При этом знак «минус» говорит о наклоне продольной ГЦОИ верхним концом в сторону геометрической оси ЛМ.
Определим значение вектора дисбаланса DКОРР в плоскости коррекции В , обеспечивающего достижение значения α , по формуле (15). Получим: DКОРР = 9581,4 г·мм, фазовый угол α КОРР = 277,5°. Значение сонаправленного дисбалансу DКОМП дисбаланса DКОРР определим по формуле (16): DКОРР = 19581,4 г·мм, фазовый угол β КОРР = 97,5°. При этом значение дополнительного дисбаланса DДПЛ 3 , противоположно направленного по отношению к дисбалансу DКОРР , будет определяться выражением (17): D ДПЛ 3 = 2874,4 г·мм, фазовый угол β Н ДПЛ 3 = 97,5°.
Используя соответствующие параметры смоделированных векторов дисбалансов DКОРР и DКОМП , определим значение и угловое положение вектора балансировочного дисбаланса DБАЛ в штатной плоскости коррекции по формулам (18) и (19): DБАЛ = 34259,3 г·мм, фазовый угол
В | α ГЛмин
α БАЛ = 268,75°.
В | α ГЛмин
В соответствии с (20), масса балансировочного груза составит mБАЛ = 171,3 г, а угол его
В|αГЛмин установки ϕБАЛ в плоскости коррекции В будет совпадать с углом αБАЛ , т. е. будет равным
268,75°.
Для оценки правильности работы рассмотренного алгоритма, убедимся, что предполагаемое значение смещения центра масс ρ РАСЧ после прикрепления к ЛМ груза mБАЛ составит
|αГЛмин В|αГЛмин величину, близкую к ρ .
Значение дисбаланса DБАЛ (на рисунке не показан), противоположно направленного дисбалансу α БАЛ , появляющемуся взамен дисбалансам D ДПЛ 1 и D ДПЛ 3 в плоскости коррекции Н как результат действия дисбаланса DБАЛ , может быть определено по формуле
БАЛ БАЛ
DН | α ГЛмин = DВ | α ГЛмин КНВ .
Таким образом, DБАЛ = 10498,8 г·мм, фазовый угол β БАЛ = 88,75°. Расчётное значение
Н|αГЛмин Н |αГЛмин смещения центра масс ЛМ, пренебрегая (как несущественно малой) массой балансировочного груза, определим по формуле
РАСЧ ρ | α ГЛмин
НАЧ НАЧ БАЛ БАЛ
DВ + DН + DВ | α ГЛмин + DН | α ГЛмин
.
M
Получим ρ РАСЧ = 0,11 мм, что практически соответствует заданному значению ρ .
Таким образом, в результате расчёта, проведённого по предложенному алгоритму, найдены искомые параметры балансировочного груза, установка которого обеспечивает выполнение условия (23) с минимально возможным для данной ЛМ отклонением продольной ГЦОИ от её геометрической оси. Подтверждена хорошая согласованность расчётных данных, что доказывает верность проведённого балансировочного расчёта.
Заключение. Рассмотренный алгоритм балансировки конической летающей модели в динамическом режиме с использованием единственной плоскости коррекции, конструктивно расположенной на значительном расстоянии от центра масс модели, с оптимизацией по критерию достижения минимального угла перекоса продольной ГЦОИ, дополняет алгоритм [1 ; 2; 12]. Алгоритм был экспериментально опробован с положительными результатами на вновь спроектированном вертикальном динамическом балансировочном стенде с газовыми опорами и защищён патентом РФ № 2694142 [18]. Проводится работа по внедрению алгоритма в методику балансировки ЛМ. Алгоритм позволяет сократить число шагов балансировки (как правило, до одного шага) либо расчётным путём доказать невозможность балансировки ЛМ с заданными параметрами и, соответственно, сократить время проведения балансировочного эксперимента.
Список литературы К вопросу прогнозирования технического состояния жидкостных ракетных двигателей малой тяги
- Ageenko Ju. I., Pegin I. V. [Confirmation of the energy efficiency of liquid propellant rocket engines with a deflector centrifugal mixture formation scheme]. Vest-nik Samarskogo gosudarstvennogo aerokosmicheskogo universiteta. 2014, No. 5, Iss. 3, P. 46-54 (In Russ.).
- Sirant A. L. Issledovanie vliyaniya neideal'nostey rabochego impul'sa zhidkostnyh raketnyh dvigateley maloy tyagi na dinamiku malogo kosmicheskogo appa-rata. Kand. Diss. [Investigation of the effect of imperfect working impulse of liquid propulsion thruster on the dynamics of a small spacecraft. Cand. Diss.]. Samara, 2008, 153 p.
- Hruckij O. V. Prognozirovanie tehnicheskogo sostojanija funkcional'no-samostojatel'nyh elementov sudovoy energeticheskoy ustanovki. Kand. Diss. [Prediction of the technical condition of functionally independent elements of a ship power plant. Cand. Diss.]. SPb., 1996, 263 p.
- Gerasimova D. S., Savina M. G., Gejman V. N. [Updating and extending aircraft technology resources]. Aktual'nye problemy aviatsii i kosmonavtiki. 2015, Vol. 1, P. 686-688 (In Russ.).
- Martirosov D. S., Kolomencev A. I. [Functional diagnostics of LRE in real time]. Aviatsionno-kosmicheskaya tekhnika i tekhnologiya. 2012, No. 7, P. 197-201 (In Russ.).
- Martirosov D. S., Sin'kov S. A. [A method for evaluating the maximum achievable accuracy of determining the parameters of the elements of rocket engines in their functional diagnostics]. Tr. NPO Energomash im. akad. V. P. Glushko. 2005, No. 23, P. 151-160 (In Russ.).
- Kolbaja T. Ch., Pasmurnov S. M., Jakush D. Ju. [Development of technology for creating a system for diagnosing and emergency protection of liquid rocket engines]. Inzhenernyy zhurnal: Nauka i innovatsii. 2016, No. 8. Available at: http://www.engjournal.ru/catalog/ arse/teje/1524.html (In Russ.).
- Bondar' A. I., Pasmurnov S. M., Jakush D. Ju. [Software and software for the emergency protection and control system for rocket engines and the procedure for testing it]. Nauka i tehnologii. Sb. nauch. tr. RAN. 2015, Vol. 5, P. 137 (In Russ.).
- Skovoroda-Luzin V. I. Telemetriya. Glaza i ushi Glavnogo konstruktora [Telemetry. Eyes and ears of the Chief Designer]. Moscow, Overley Publ., 2009, 320 p.
- Polenov D. Ju. Jevoljucija telemetrii v raketnoj tehnike. [The evolution of telemetry in rocket technology]. Molodoy uchenyy. 2014, No. 6, P. 216-218 (In Russ.).
- Levochkin P. S., Martirosov D. S., Bukanov V. T. [Problems of functional diagnostics of liquid rocket engines]. Vestnik MGTU im. N. Je. Baumana. Ser. "Mashi-nostroenie". 2013, No. 1, P. 72-88 (In Russ.).
- Gorban' A. N., Rossiev D. A. Neyronnye seti na personal'nom komp'yutere [Neural networks on a personal computer]. Novosibirsk, Nauka Publ., 1996, 276 p.
- Kruglov V. V., Borisov V. V. Iskusstvennye neyronnye seti. Teoriya i praktika [Artificial neural networks. Theory and practice]. Moscow, Goryachaya liniya Publ., 2002, 382 p.
- Ljubimova T. V., Gorelova A. V. [The solution to the problem of forecasting using neural networks]. Innovacionnaya nauka. 2015, No. 4, P. 39-43 (In Russ.).
- Kolomencev A. I., Hohlov A. N. [Optimal test planning of liquid propulsion rocket engines of small thrusts to determine their main parameters and characteristics]. Vestnik PNIPU. Aerokosmicheskaya tekhnika. 2016, No. 47, P. 109-122 (In Russ.).
- Dobrovol'skij M. V. Zhidkostnye raketnye dviga-teli. Osnovy proektirovaniya [Liquid rocket engines. Design basics]. Moscow, Izd-vo MGTU im. N. Je. Baumana Publ., 2006, 488 p.
- Druzhin A. N. Teplovaya i energeticheskaya effek-tivnost' do i sverkhzvukovykh gazovykh zaves v raketnykh dvigatelyakh maloy tyagi. Kand. Diss. [Thermal and energy efficiency before and supersonic gas curtains in small thrust rocket engines. Cand. Diss.]. Samara, 2002, 213 p.
- Majorova V. I., Grishko D. A., Remen' B. A., Am-barcumov A. A., Kaldarov I. S. [Automation of receiving and processing backup telemetric information from space]. Vestnik MGTU im. N. Je. Baumana. 2013. No. 1 (90), Р. 89-99 (In Russ.).
- Lukin F. A., Shahmatov A. V., Mushovec K. V., Zelenkov P. V. [The mechanism of controlled telemetry of a spacecraft]. Vestnik SibGAU. 2012, No. 5 (45), Р. 140-144 (In Russ.).
- Il'in V. A. Teleupravlenie i teleizmerenie [Remote control and telemetry] Moscow, Jenergoizdat Publ., 1982, 560 р.
- Milicin A. V., Samsonov V. N., Hodak V. A. et al. Otobrazhenie informacii v Centre upravleniya kosmiches-kimi poletami [Display of information in the Space Flight Control Center]. Moscow, Radio i svyaz Publ, 1982, 192 р.
- Emel'janova Ju. G., Talalaev A. A., Fralenko V. P., Hachumov V. M. [Neural network method for detecting malfunctions in space subsystems]. Trudy mezhdunarod-noy konferencii "Programmnye sistemy: teorija i priloz-heniya" [Proceedings of the international conference "Software systems: theory and applications"] (Pereslavl' Zalesskiy, Russia, may 2009). 2009, Р. 133-143 (In Russ.).
- Efimov V. V., Kozyrev G. I., Loskutov A. I. et al. Neyrokomp'yutery v kosmicheskoy tekhnike [Neurocomputers in space technology. Radio engineering]. Moscow, 2004, 317 р.
- Efimov V. V. [Neurointellectualization of onboard control systems for spacecraft surveillance]. Mehatronika, avtomatizacija, upravlenie. 2006, No. 10, Р. 2-15 (In Russ.).
- Labinskij A. Ju., Utkin O. V. [To the question of approximation of a function by a neural network]. Pri-rodnye i tehnogennye riski fiziko matematicheskie i prik-ladnye aspekty). 2016, No. 1, P. 5-11 (In Russ.).
- Rutkovskij L., Pilin'skij M., Rutkovskaja D. Neyronnye seti, geneticheskie algoritmy i nechetkie sistemy [Neural networks, genetic algorithms and fuzzy systems]. Moscow, Telekom Publ., 2004, 385 p.
- Tarhov D. A. Neyronnye seti kak sredstvo mate-maticheskogo modelirovaniya [Neural networks as a means of mathematical modeling]. Moscow, Radio-tehnika Publ., 2006, 48 p.
