К задаче конструирования автоматического регулятора для статического объекта первого порядка с запаздыванием

Автор: Панферов Сергей Владимирович, Панферов Владимир Иванович
Статья в выпуске: 23 (240), 2011 года.
Бесплатный доступ
Исследованы устойчивость и качество переходных процессов в системах автоматического регулирования, сконструированных методом эталонной передаточной функции замкнутой системы. Объект управления представляется инерционным звеном первого порядка с запаздыванием. Рассматриваются вариации как параметров настройки регулятора, так и параметров объекта управления.
Устойчивость, качество переходных процессов, система автоматического регулирования, эталонная передаточная функция
Короткий адрес: https://sciup.org/147154761
IDR: 147154761 | УДК: 621.311.22.011
То design tasks for an automatic regulator for the first degree static objects with time delay
Investigated the stability and quality of transient processes in automatic regulation sistems, designed by a reference transfer function of a closed system. Control object is the inertial part of the first degree with delay. We consider variations of regulator settings and parameters of the managed object.
Текст научной статьи К задаче конструирования автоматического регулятора для статического объекта первого порядка с запаздыванием
Введение 1
Широко известно, что наибольшая экономия тепловой энергии в системах теплоснабжения зда-ний достигается за счет их автоматизации, поэто-му разработка вопросов, связанных с проблемой построения высококачественных систем автома-тического управления, является вполне актуальной задачей. В настоящее время в промышленности,В том числе и в системах теплоснабжения зданий для автоматического регулирования различных переменных технологических процессов, широко используются ПИД-регуляторы и их частные ва-рианты . Накоплен огромнейший опыт применения таких регуляторов, в частности, разработаны и апробированы различные способы их настройки. Вместе с тем, как неоднократно отмечает В .Я. Ро -тач в своем сравнительно недавно изданном учеб-нике [1], п-, пи- и ПИД- «…алгоритмы были по-лучены чисто эвристическим путем» [1, с . 82 И др.] и что «…достаточно убедительное формальное
… до сих пор получить не удалось» [1, с. 24].
В работе [2], как нам представляется, удалось получить некоторое формальное обоснование це-лесообразности применения ПИД-регуляторов, здесь задача решалась методом «подгонки» пере -даточной функции замкнутой системы автомати-ческого регулирования к некоторому достаточно разумному и практически достижимому виду . Найдены эталонные структуры и настройки регу-ляторов для типовых динамических характеристик промышленных объектов управления, при этом установлено, что все эти регуляторы принадлежат ПИД-семейству. Казалось бы, что поставленная цель достигнута, однако для полноты исследова-ния проблемы необходимо рассмотреть вопрос о качестве переходных процессов (ПП) в таких сис -темах и о грубости этих структур и настроек, дан -ная задача и решается в настоящей работе для од-ного из типовых объектов управления.
Постановка задачи
Рассмотрим вопрос о качестве переходных процессов и о грубости систем автоматического
.. , ..
регулирования (САР) с объектом управления с передаточной функцией вида
W б( Р ) = т k06 . ex P(-Tоб Р ), (1)
ТобР +1
где к0б, Тоб, тоб - соответственно коэффициент передачи, постоянная времени и время запаздывания объекта; p - комплексная переменная. В со ответствии с [2] близким к идеальному для такого объекта будет ПИ-регулятор с передаточной функцией
WP ( Р ) =
T ко б^об+б)
1 н--. Tp
Здесь 9 - постоянная времени эталонной передаточной функции замкнутой системы
W с( P 1 —Aex|p Т об Р ).
9 p + 1
Требуется оценить устойчивость САР и качество переходных процессов в ней при вариациях пара -метров настройки регулятора и параметров объек-та управления.
Методика решения задачи
Для анализа переходных процессов в системе с объектом управления данного типа разработаны две компьютерные программы: одна для анализа переходных процессов при возмущении по зада -нию, а другая - при возмущении со стороны регулирующего органа. В каждой из разработанных программ предусмотрен ввод к 0б, Т об, тоб , а также коэффициента передачи ПИ-регулятора кр и времени интегрирования Ти , каждая из программ не только осуществляет построение графика пере -ходного процесса, но и определяет перерегулирование ст и время регулирования tp , а также вычисляет значения критериев: t
1 1 = J|s( t )| dt ; (2)
0 t
12 = ^2(t ) dt , (3)
где tK - конечное время оценки переходного процесса ; s( t )= x3 ( t )- x ( t ) - ошибка регулирования (рассогласование); x3 ( t ) и x ( t ) - соответственно заданное и действительное значение регулируемой величины; t - время. При этом время регулирования t p определялось как время, по истечение которого отклонение регулируемой величины от за -дания не будет превышать 5 %.
Интегрирование дифференциального уравне-ния объекта управления осуществлялось методом Рунге -Кутты с погрешностью, пропорциональной пятой степени шага по времени. Для компьютерного использования алгоритм ПИ -регулирования представляли в дискретной форме, при вычислении интеграла применяли метод трапеций. С целью сокращения объема необходимых вычислений использовали рекуррентную форму дискретного представления алгоритма ПИ-регулирования, приведенную в работе [3]:
U ( m )= U ( m- 1) + q ое( m ) + q 1e( m -1), (4) где m - номер расчетного шага по времени; q о = кр [1 + hl (2 Т и)]; q1 =к^1 (2 Т И )-1]; h - величина шага по времени; U - выходная величина регулятора (% хода исполнительного механизма (ИМ)). В программах предусматривается ввод нижнего и верхнего пределов изменения регули -рующего воздействия U .
Вариация параметров настройки регулятора
Исследование качества переходных процессов в САР проводилось в окрестности базовых настроек:
T
; к о б^об+б)
Т = Т.
и об,
при этом в координатах « кр • • • Ти » точка с базовыми настройками располагалась в центре прямо -угольника, вычисления проводились для настроек, расположенных на диагоналях и на отрезках пря-мых, соединяющих середины противоположных сторон прямоугольника (рис. 1).
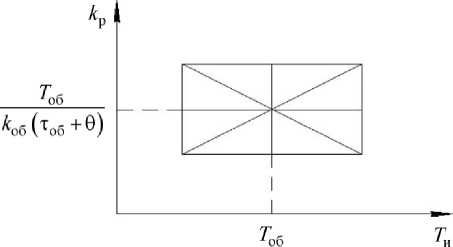
. 1.
настройки регулятора
Сначала параметр 9 полагался равным ну -лю. Пусть, например, к об =1,5 т/ч/% хода ИМ; Т об = 15 с; тоб=5 с (параметры объекта управления соответствуют динамическим свойствам кана -ла «расход топлива - тепловая нагрузка» котельной установки [4]). В этом случае базовые значения параметров настройки регулятора равны:
T к = ———=2% хода ИМ/т/ч; Т тТ б =15 c. k
Результаты расчетов показателей качества пере -ходных процессов при возмущении по заданию приведены в табл. 1-3.
Как видно из табл. 1-3, в значимой по размерам окрестности базовой точки
T к = ———=2 % хода ИМ/т/ч; Т тТ^ =15 c k
Таблица 1
Показатели качества переходных процессов при T 1 = 15c и различных значениях k при возмущении по заданию
|
% хода ИМ \ k р , 1 т/ч |
1,0 |
1,5 |
2,0 |
2,5 |
3,0 |
3,5 |
|
ст,% |
0 |
0 |
0 |
0,79 |
9,70 |
со ( расходя-щийся 1111) |
|
t р,С |
53,8 |
49,9 |
44,6 |
55,2 |
130,8 |
ОО |
|
I 1,(т/ч )•С |
24,81 |
21,49 |
19,82 |
18,98 |
24,18 |
ОО |
|
I 2,(т/ч)2 •С |
17,34 |
14,71 |
13,28 |
12,46 |
12,51 |
ОО |
Таблица 2
Показатели качества переходных процессов при k р =2%хода И М /т/ч и различных значениях T при возмущении по заданию
|
T ,c |
5,0 |
7,0 |
10,0 |
13,0 |
15,0 |
17,0 |
20,0 |
|
ст,% |
со ( расходя-щийся 1111) |
43,38 |
8,42 |
0,03 |
0 |
0 |
0 |
|
t р,С |
ОО |
114,1 |
38,9 |
40,2 |
44,6 |
58,2 |
68,3 |
|
I 1,(т/ч )•С |
ОО |
25,24 |
15,04 |
17,18 |
19,82 |
22,44 |
26,51 |
|
I 2,(т/ч)2 •с |
ОО |
12,47 |
10,92 |
12,18 |
13,28 |
14,46 |
16,31 |
Таблица 3
Показатели качества переходных процессов при различных значениях k р иT при возмущении по заданию
|
k %хода ИМ k р, |
1,0 |
1,0 |
1,5 |
1,5 |
2,5 |
2,5 |
3,0 |
3,0 |
|
T ,c |
10,0 |
20,0 |
12,5 |
17,5 |
12,5 |
17,5 |
10,0 |
20,0 |
|
ст,% |
4,80 |
0 |
0 |
0 |
5,43 |
0,01 |
со ( эасходя-щийся 1111) |
1,99 |
|
t р ,С |
27,2 |
80,6 |
41,2 |
61,4 |
55,6 |
56,9 |
ОО |
88,7 |
|
I 1,(т/ч ) •С |
17,92 |
33,18 |
17,91 |
25,13 |
17,38 |
22,02 |
ОО |
24,33 |
|
I 2,(т/ч)2 •С |
13,86 |
21,23 |
13,18 |
16,34 |
11,33 |
13,81 |
ОО |
14,67 |
САР достаточно устойчивая и качество переход-ных процессов вполне удовлетворительное. Сле -довательно, можно сделать заключение, что рас-сматриваемая система достаточно робастная по отношению к настройкам регулятора при возму-щении по заданию .
Для всех рассмотренных настроек ПИ-регуля-тора определили качество переходных процессов и при возмущении по нагрузке (со стороны регули-рующего органа), результаты вычислений приве-дены в табл. 4‒6.
Как видно из табл. 4‒6, также в значимой по размерам окрестности базовой точки k >б =2% хода ИМ /т/ч;T1 =T )б =15c k
САР достаточно устойчивая и качество переход-ных процессов вполне удовлетворительное и при возмущении по нагрузке . Следовательно , можно сделать заключение, что рассматриваемая система достаточно робастная по отношению к настройкам регулятора и при возмущении со стороны регули-рующего органа.
Сравнивая качество переходных процессов при возмущении по заданию и при возмущении по нагрузке при одинаковых настройках регулятора, можно отметить, что в целом, по нашим оценкам, рассматриваемая САР все- -ет возмущение по заданию, показатели качества переходных процессов принимают более жела-тельные значения . По -видимому, все это является следствием применяемого подхода к решению задачи синтеза САР : -тать возмущение именно по каналу задания.
Настройки ПИ-регулятора, оптимальные по критериям (2) и (3), могут не совпадать как между собой, так и с базовой настройкой, но в целом их различие достаточно небольшое .
Таблица 4
Показатели качества переходных процессов при T 1 = 15c и различных значениях kр при возмущении по нагрузке
|
% хода ИМ k р , т/ч |
1,0 |
1,5 |
2,0 |
2,5 |
3,0 |
3,5 |
|
ст,% |
0 |
0 |
0,19 |
19,33 |
40,77 |
сс ( расхода-щийся 1111) |
|
t р,С |
77,9 |
68,6 |
67,1 |
102 |
308,8 |
ОО |
|
I 1,(т/ч )•С |
14,99 |
9,99 |
7,50 |
8,46 |
20,13 |
ОО |
|
I 2,(т/ч)2 •С |
5,98 |
3,44 |
2,45 |
2,18 |
3,39 |
ОО |
Таблица 5
Показатели качества переходных процессов при k р =2%хода ИМ /т/ ч и различных значениях T при возмущении по нагрузке
|
T ,c |
5,0 |
7,0 |
10,0 |
13,0 |
15,0 |
17,0 |
20,0 |
|
ст,% |
со ( расхода-щийся 1111) |
63,41 |
28,98 |
9,24 |
0,19 |
0 |
0 |
|
t р,С |
ОО |
173,7 |
80,5 |
66,8 |
67,1 |
69,4 |
88 |
|
I 1,(т/ч )•С |
ОО |
15,56 |
8,23 |
7,20 |
7,50 |
8,49 |
9,99 |
|
I 2,(т/ч)2 •С |
ОО |
3,58 |
2,39 |
2,37 |
2,45 |
2,58 |
2,80 |
Таблица 6
Показатели качества переходных процессов при различных значениях k р иT при возмущении по нагрузке
|
k %хода ИМ k р, |
1,0 |
1,0 |
1,5 |
1,5 |
2,5 |
2,5 |
3,0 |
3,0 |
|
T ,c |
10,0 |
20,0 |
12,5 |
17,5 |
12,5 |
17,5 |
10,0 |
20,0 |
|
О,% |
5,81 |
0 |
0 |
0 |
31,47 |
10,60 |
сс ( расхода-щийся 1111) |
24,94 |
|
t р,С |
57,3 |
114,9 |
54,1 |
82,6 |
115,4 |
98,9 |
ОО |
202,7 |
|
I 1,(т/ч ) •С |
11,03 |
19,99 |
8,33 |
11,66 |
9,68 |
8,09 |
ОО |
13,54 |
|
I 2,(т/ч)2 •С |
4,72 |
7,38 |
3,16 |
3,77 |
2,28 |
2,20 |
ОО |
2,62 |
[2], включается инерционно-форсирующее звено
Изменение параметров объекта управления
Если робастность рассматривать как грубость системы по отношению к изменениям параметров объекта управления, то можно привести следую-щие результаты. Если все параметры объекта управления изменятся соответственно на А k об ,
АT,б и на Атоб , а регулятор будет иметь преж- нюю настройку, то передаточная функция разомк-нутой системы будет иметь вид
T об p +1
( T об + А T об ) p +1
и звено чистого запаздывания
(1 + Д k об/ k об )exp( "А^об p ) . Влияние инерционно-форсирующего звена на устойчивость САР и каче-:
если АT об < 0 и если |АT)б | увеличивается, то на- чинают преобладать дифференцирующие свойства
W ( p ) exp( Т°б p )
(9+тоб ) p
[ T >б p + 1](1 + Д k об / k об )exp(~Атоб p )
( T )б +А T об ) p +1
звена.
Если из (5) исключить передаточную функ-цию инерционно-форсирующего звена,т.е. если считать, что А T ,б = 0 ‒ якобы постоянная времени
объекта управления не меняется, то , используя
Из (5) следует, что в данном случае после-довательно с «идеальной» передаточной функ-
критерий устойчивости Найквиста для систем с
запаздыванием, найдем, что критическая частота
цией разомкнутой системы, равной
exp(~%б p )
(9+тоб ) p
®кр
1+ Д k об / k об 9+тоб
поэтому условие устойчивости замкнутой САР в :
(1 k об / k Об)-2Й----2§-<л/ 2 . (7)
9+тоб
На координатной плоскости « А k об/ k об ‒
Атоб Лоб » граница области устойчивости будет
:
А k об (1 j4%6)1 k об 2(1 + Аб Лоб)1
На рис . 2 изображена область устойчивости замкнутой системы при 6=0и А T об =0.
На рис . 2 область устойчивости ‒ это область, расположенная ниже своей границы (штриховка направлена внутрь области). Как видно из рис. 2, даже при 9-0 замкнутая система обладает хоро- шим запасом устойчивости в отношении вариации параметров k об ^ Аб , причем, нетрудно видеть, что с увеличением параметра 9 область устойчи- вости замкнутой САР расширяется, так как
. । Гтс А I зет» вверх,а —1+---- ‒ точка пересечения
22Тоб J кривой (8) с осью абсцисс « А тоб !^об » перемеща-ется влево . Следовательно , с увеличением 9 роба-стность устойчивости [5] повышается.
Понятно, что включение инерционно-форси-рующего звена с частотной передаточной функцией j™T>б +11+ со2T2
j®(T >б +А T 1б) +11+ со 2( T )б +А T ,б) 2
х exp j arctg (® T >б)_arctg(™( T )б +А T )б ))])
изменит как критическую частоту, так и само ус-ловие устойчивости замкнутой системы, здесь со ‒ круговая частота, j=v~1. Критическую частоту юкр в этом случае необходимо отыскивать из ре-
:
(1 k эб / k об ) м 1
(9 + Аб )®кр
‒ точка пересечения кривой (8) с
осью ординат «А k об / k об » с увеличением 9 «пол-

1, 22
1 + T )б
1 + 0) 2р( T )б +А T )б)2
Решая это уравнение, получаем
_ ^0 _]_ ^ _ ^ 2 T 2 (1+д k об/ k об)2
22 2-+
2(6 +Тоб) T 2,(1 + АГоб/ T )б)
2(9 + тоб) TЛ 1 + АГоб/ T )б)2

Рис. 2. Область устойчивости САР при 0 = 0и А T >б = 0
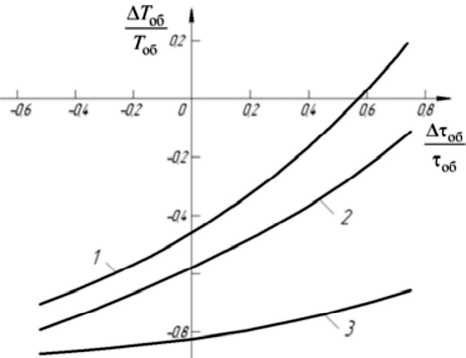
Рис. 3. Сечения области устойчивости САР при Л k об =0:
1 ‒9 =0с; 2 ‒9 =1с; 3 ‒9 =5с
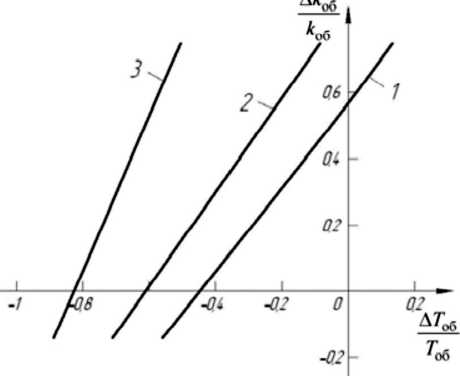
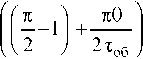
Рис. 4. Сечения области устойчивости САР при Атоб =0:
1 ‒9 =0с; 2 ‒9 =1с; 3 ‒9 =5с
Условие устойчивости замкнутой САР будет иметь вид
®кр^об (1 "*" А^об /^об ) arctg (юкр T й) +
+ arctg [®кр T >б ( 1 T )б/ T )б)]<л/2. (11)
Заметим, что соотношения (6) и (7) являются частными случаями условий (10) и (11).
Исследование границы области устойчивости САР, построенной по соотношению (11) с помо-щью среды программирования «Maple 10», пока-зало , что система имеет значимый запас устойчи-вости относительно вариации параметров объекта управления А k об ,А T >б и Атоб . Сечения границы области устойчивости плоскостями А k об = 0 И Атоб = 0 при 0 = 0; 1; 5 c приведены соответствен-но на рис. 3. и 4. Как видно из этих рисунков, раз-меры области устойчивости системы увеличива-ются при увеличении параметра 9 (увеличивают-ся размеры допустимых вариаций всех параметров объекта управления).
Как видно из рис. 3, неблагоприятное влияние времени запаздывания на устойчивость системы может быть скомпенсировано увеличением T )б , что , в общем- , достаточно понятно . Из рис . 4 следует, что негативное влияние роста k об на ус-тойчивость САР также может быть нейтрализова-но увеличением T ,б .
Передаточная функция замкнутой системы по задающему воздействию при вариации всех пара-метров объекта управления А k об , А T >б и Атоб
:
W С ( p)=(T )б p +11 +д k об/ k об) exp[ (тоб+Атоб) p ]х х{( T й + А T й)(9+тоб) p 2 +(0+тоб) p+
+(T й p +1 1+д k об/ k об) exp[ (тоб+Атоб) p ]} 1. (12)
Отсюда следует, что дифференциальное урав-нение замкнутой САР будет иметь вид
(T)б+АTй)(9 + тоб ) dd2x2(t) +(9+тоб) dx(t) dt2
dx (t Аб А%б) .
+T )б ( 1+Дkоб/kоб) dx t
+(1 k об / k об) x(t Аб ААб)
T )б ( 1 k об/ k об)
dx Д t ^об ДАб) dt
+(1 kоб/kоб)x3(t Аб ААб).
Решая непосредственно данное дифференци-альное уравнение (13) и используя программу рас-чета переходных процессов в САР, в которой ма-тематические описания элементов системы регу-лирования представлены по отдельности, устано -ВИЛИ, что при возмущении по заданию показатели качества переходных процессов при вариации па-раметров объекта управления будут следующими (табл. 7‒9). При этом считалось, что ПИ-регулятор имеет базовые настройки
T k >б =2%хода ИМ /т/ч;T,=T ,6 =15c.
* к k
Анализ данных табл. 7‒9 позволяет сделать вывод, что в окрестности точки (0,0,0) существу-ет довольно заметная область вариации парамет-ров Д k об ,д T >б и ААб , для которой сохраняются приемлемые значения показателей качества пере-ходных процессов.
В табл. 10‒12 приведены аналогичные данные для случая возмущения по нагрузке.
Как это нетрудно видеть из (12), при отработ-ке единичного ступенчатого задания U ( t ) 1( t ) при t —^со x ->1, т.е. САР астатическая по задаю-щему воздействию. Передаточная функция сис-темы по каналу «возмущение со стороны регули-
Таблица 7
Показатели качества переходных процессов для k об = 1,5 Т/ч/%хода ИМ ; T >б =15c; Тоб 5c при возмущении по заданию при различных значениях А T >б
|
А T )б,c |
+1 |
+3 |
+5 |
‒1 |
‒3 |
‒5 |
|
ст,% |
0 |
0 |
0 |
0 |
0 |
2,11 |
|
t р ,с |
45,2 |
46,0 |
45,9 |
44,0 |
54,6 |
68,8 |
Таблица 8
Показатели качества переходных процессов для k об = 1,5 T/ч/%хода ИМ ; T >б =15c; тоб = 5c при возмущении по заданию при различных значениях Лтоб
|
Атоб,c |
+1 |
+2 |
+2,5 |
+3 |
‒1 |
‒2 |
‒3 |
|
ст,% |
1,49 |
12,29 |
20,52 |
со ( эасходящийся ПП) |
0 |
0 |
0 |
|
t р,С |
64,4 |
129,1 |
272,3 |
сс |
49,0 |
49,3 |
49,6 |
Таблица 9
Показатели качества переходных процессов для k об = 1,5 T/ч/%хода ИМ ; T >б =15c; тоб = 5c при возмущении по заданию при различных значениях А k об
|
k_ т/4 1 k эб,% хода ИМ |
+0,1 |
+0,3 |
+0,5 |
+0,75 |
+1,0 |
‒0,1 |
‒0,3 |
‒0,5 |
|
О,% |
0 |
0,31 |
2,61 |
9,70 |
сс (расходящийся 1111) |
0 |
0 |
0 |
|
t р,С |
42,7 |
55,3 |
54,7 |
130,8 |
00 |
46,4 |
49,0 |
51,1 |
Таблица 10
Показатели качества переходных процессов для k об = 1,5 Т/ч/%хода ИМ ; T >б =15c; тоб = 5c при возмущении по нагрузке при различных значениях А T)б
|
А T )б,c |
+1 |
+3 |
+5 |
‒1 |
‒3 |
‒5 |
|
О,% |
0 |
0 |
0 |
3,49 |
12,40 |
25,06 |
|
t р,С |
67,8 |
54,3 |
57,0 |
65,6 |
81,1 |
152,1 |
Таблица 11
Показатели качества переходных процессов для k об = 1,5 Т/ч/%хода ИМ ; T >б =15c; ^об 5c при возмущении по нагрузке при различных значениях Атоб
|
Атоб,c |
+1 |
+2 |
+2,5 |
+3 |
‒1 |
‒2 |
‒3 |
|
ст,% |
21,83 |
43,50 |
54,19 |
со ( эасходящийся ПП) |
0 |
0 |
0 |
|
t р,С |
111,2 |
268,3 |
556,4 |
СС |
62,7 |
63,2 |
63,6 |
Таблица 12
Показатели качества переходных процессов для k об = 1,5 Т/ч/%хода ИМ ; T >б =15c; ^об 5c при возмущении по нагрузке при различных значениях А k об
W ( p ) =( k эб +Д k эб ) k эб T 6 p (тоб +9) exp(^об"*"^об) p ]х *{kT >б p (6+ТобЖ T )б+д T )б) p +1]+ +T )б ( T >б p +1)( k эб +Д k об)exp[ (%б+Атоб) p ]} 1 , (14) поэтому lim W ( p ) 0 при p 0, следовательно , по данному каналу САР также астатическая.
Заключение
Таким образом, достаточно подробный анализ показал, что рассматриваемый метод синтеза про-мышленных САР, позволяющий однозначно вы-брать как структуру, так и параметры настройки регулятора, обеспечивает приемлемое качество переходных процессов и достаточный запас ус-тойчивости системы при довольно заметных по размерам вариациях параметров объекта управле-ния и погрешностях задания настроек регулятора. Поэтому данный метод синтеза можно достаточно уверенно рекомендовать для практического ис-пользования.
Список литературы К задаче конструирования автоматического регулятора для статического объекта первого порядка с запаздыванием
- Ротач, В.Я. Теория автоматического управления: учеб. для вузов/В.Я. Ротач. -М.: Изд-во МЭИ, 2004. -400 с.
- Панфёров, С.В. К обоснованию метода структурно-параметрического синтеза автоматических регуляторов/С.В. Панфёров, А.И. Телегин, В.И. Панфёров//Вестник ЮУрГУ. Серия «Компьютерные технологии, управление, радиоэлектроника». -2009. -Вып. 9. -№ 3(136). -С. 29-36.
- Плютто, В.П. Практикум по теории автоматического управления химико-технологическими процессами. Цифровые системы/В. П. Плютто, В.А. Путинцев, В.М. Глумов. -М.: Химия, 1989. -279 с.
- Копелович, А.П. Инженерные методы расчета при выборе автоматических регуляторов/А.П. Копелович. -М.: Металлургиздат, 1960. -190 с.
- Дорф, Р. Современные системы управления: пер с англ./Р. Дорф, Р. Бишоп. -М.: Лаборатория Базовых Знаний, 2002. -832 с.
