Камертонный вибровискозиметрический датчик для исследования термостимулированных процессов в жидкостях

Автор: Соломин Борис Александрович, Низаметдинов Азат Маратович, Черторийский Алексей Аркадьевич, Конторович Михаил Леонидович
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Физика и электроника
Статья в выпуске: 2-1 т.17, 2015 года.
Бесплатный доступ
Описан вибровискозиметрический датчик с колебательной системой камертонного типа. Рассмотрена возможность его применения для исследования термостимулированных межмолекулярных процессов в жидкостях. Показано, что оптимальная настройка камертона позволяет минимизировать влияние способа крепления датчика на его метрологические характеристики.
Вискозиметр, камертон, вибровискозиметрический датчик, межмолекулярное взаимодействие, чувствительность, термостимулированные процессы
Короткий адрес: https://sciup.org/148203632
IDR: 148203632 | УДК: 532.137
Pitchfork vibro-viscosimetric sensor for investigation of thermally induced processes in liquids
This article describes the vibro-viscometric sensor with pitchfork oscillatory system. Considered the possibilities of its application for studying thermally induced intermolecular processes in liquids. It is shown that the optimal setting of the pitchfork allows to minimize the influence of the method of mounting the sensor on its metrological characteristics.
Текст научной статьи Камертонный вибровискозиметрический датчик для исследования термостимулированных процессов в жидкостях
мы, r – механическое сопротивление колебательной системы, k – приведенная жесткость колебательной системы, х – отклонение колебательной системы от положения равновесия, F(t) – вынуждающая сила, приложенная к колебательной системе. Данное уравнение достаточно хорошо описывает поведение вибровискозиметра, работающего в режиме вынужденных колебаний с малой амплитудой [1].
При использовании в качестве зонда вискозиметра шарика диаметром d , погруженного в жидкость с динамической вязкостью п, плотностью р, и достаточно удаленного от стенок кюветы, на основании решения уравнения Навье-Стокса можно найти силу сопротивления Fc , действующую на колеблющийся с частотой ю шарик [4,5]:
F = г • 1 c r з
д x д2 x
— + m— 7 д t д t 2
где r з – механическое сопротивление зонда в жидкости, m – присоединенная масса жидкости. При
этом механическое сопротивление и присоединенная масса выражаются следующим образом:
r3 = 3 nnd
1 + d- (юР/2 n)1/2
n 3 ( 2 np/to ) 1/2
m = —d p + 9 -^-У-—
12 P d
Параметры r з и m могут быть определены в результате экспериментальных измерений резонансной частоты to , амплитуды А и фазы
ф вынужденных колебаний зонда на воздухе и при его погружении в жидкость [6]. В этом случае динамическая вязкость и плотность жидкости вычисляются путём одновременного решения уравнений (3) и (4). Необходимо отметить, что это возможно только при сферической форме зонда.
Точность определения динамической вязкости и плотности с помощью вибровискозиметра существенно зависит от его конструктивного исполнения, в том числе от эффективности его виброизоляции от внешней среды.
Для анализа влияния конструкции на параметры вибровискозиметра рассмотрим его упрощенную механическую модель (рис. 1), включающую в себя массивное основание массой М с возбудителем колебаний (например, электромагнитным), зонд массой m и упругую безмассовую связь k между ними. Z – комплексное механическое сопротивление связи между основанием и землей (бесконечной массой).
Рассмотрим случай, когда Z бесконечно велико, т.е. связь между основанием и землей отсутствует (вибродатчик находится в свободном пространстве).
Пусть со стороны основания на зонд действует сила . При этом со стороны зонда на основание будет встречно действовать такая же сила Fm. В этом случае при движении зонда с ускорением аm основание вибродатчика будет двигаться с ускорением т .
Под действием данной гармонической силы FM зонд совершает механические колебания амплитудой hm и частотой ω относительно положения равновесия: .
m

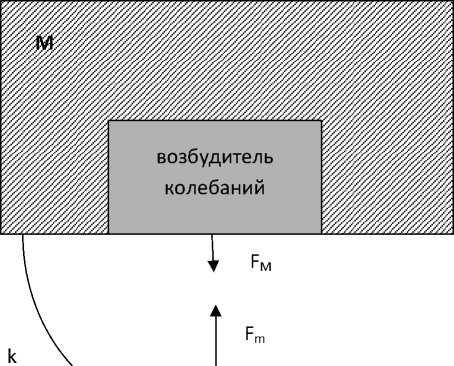
Рис. 1. Упрощенная механическая модель вибровискозиметра
В этом случае максимальная скорость его движения .
Основание также совершает механические колебания. При этом с учетом закона сохранения количества движения максимальная скорость т основания составит с амплитудой колебаний .
™ М
С учетом того, что кинетическая энергия пропорциональна массе колеблющегося тела и квадрату его скорости, получаем отношение кинетической энергии основания EM к кинетической энергии зонда Em:
Ем т
.
Таким образом, при конечном значении массы основания общая энергия возбудителя будет перераспределяться между основанием и зондом обратно пропорционально отношению их масс. При процесс передачи энергии от возбудителя на основание вибродатчика прекращается, и вся энергия передается вибрирующему зонду.
В реальных условиях вибродатчик не находится в свободном пространстве, а его основание связано с бесконечной массой (землей) через промежуточные конструктивные элементы: вибро – и термоизоляцию, внешний корпус, позиционер.
Данные элементы, в общем случае, обладают как упругими (реактивными), так и вибропоглощающими (активными) свойствами. Величина конечного механического сопротивления Z будет определять потери энергии EM возбудителя механических колебаний. Механическое сопротивление может существенно зависеть от температуры окружающей среды, нестабильности во времени механических характеристик элементов вибро-и термоизоляции, конструктивных соединений. Указанные обстоятельства приводят, при постоянстве возбуждающей силы FM, к нестабильности амплитуды h колебаний зонда во времени, т.е. ограничивают разрешающую способность и чувствительность вибродатчика.
Улучшить метрологические характеристики вибродатчика можно, если уменьшить передачу энергии EM на основание вибродатчика. Этого можно достичь либо за счет значительного увеличения массы основания в рассмотренной механической модели, либо за счет введения дополнительного колебательного звена, соединенного с основанием вибродатчика.
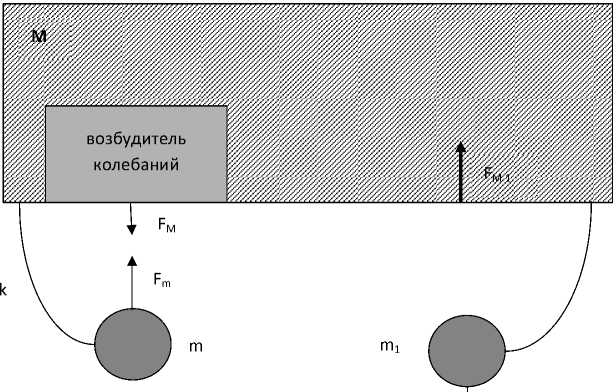
Рассмотрим подробнее вторую возможность, которая схематически показана на рис. 2 для случая вибродатчика в свободном пространстве.
В отличие от рис. 1 здесь введен дополнительный элемент – «компенсатор» с массой m1 и упругой безмассовой связью k1 между компенсатором и основанием M. Компенсатор находится вне зоны действия возбудителя. Резонансные частоты колебаний зонда ω m и компенсатора ω m1
F m 1
Рис. 2. Колебательная система с компенсатором
k k равны, соответственно: to m = . —, m m 1 = — .
m m 1
Для компенсации необходимо выполнение условия равенства резонансных частот to m = to m 1 = to . В этом случае при колебаниях зонда под действием возбуждающей силы FM с амплитудой hm и частотой w компенсатор, за счет колебаний основания вибродатчика, также начнет колебаться с данной частотой и установившейся амплитудой hm1. При этом колебания зонда и компенсатора происходят в противофазе.
Найдем результирующую силу, действующую на основание при установившихся колебаниях зонда и компенсатора:
Из (5) и (9) получим:
Список литературы Камертонный вибровискозиметрический датчик для исследования термостимулированных процессов в жидкостях
- Каплун А.Б., Соловьев А.Н. Вибрационный метод измерения вязкости жидкостей. Новосибирск: Наука, 1970. 140 с.
- Измерения массы, плотности и вязкости. М.: Изд-во стандартов, 1988. 175с.
- Соломин Б.А., Галкин В.Б., Паничкин Г.Н. Метод неравновесной термодинамики для исследования межмолекулярных взаимодействий в смазочных мослах. Химия и технология топлив и масел. 2008. № 5. С. 48-52.
- Ландау Л.Д., Лившиц Е.М. Механика сплошных сред. М.:ГИТТЛ, 1953. 796 с.
- Кочин Н.Е., Кибель И.А., Розе Н.В. Теоретическая гидродинамика. Часть 1. М.: Физматгиз, 1963. 583c.
- Динамический способ исследования теплофизических свойств жидкостей и устройство для исследования теплофизических свойств жидкостей: пат. 2263305 РФ. № 2004122182/28; заявл. 19.07.2004; опубл. 27.10.2005. Бюл. № 30.
- Вибровискозиметрический датчик: пат. 2419781 РФ. № 2008137896/28; заявл. 22.09.2008; опубл. 27.05.2011. Бюл. №15.
