Кинематическая схема стыковочного механизма типа "штырь-конус" для перспективных космических кораблей

Автор: Яскевич Андрей Владимирович
Журнал: Космическая техника и технологии @ktt-energia
Рубрика: Роботы, мехатроника и робототехнические системы
Статья в выпуске: 4 (19), 2017 года.
Бесплатный доступ
Стыковочный механизм типа «штырь-конус» около 40 лет применяется для стыковки российских кораблей и модулей. Предлагается его новая кинематическая схема для снижения динамических контактных нагрузок и возможности стыковки к пассивным портам с различной конфигурацией приемных конусов. Новый механизм отличается от существующего следующими основными особенностями. Двухступенчатая фрикционная муфта используется вместо пружины и электромагнитных тормозов в осевом демпфере. Универсальный шарнир подвижного корпуса перемещен в основание стыковочного механизма, а ориентация пружин и электромагнитных тормозов бокового демпфера изменена в соответствии с этим новым положением. Рычаги выравнивания существующего механизма заменены ограничителем, перемещающимся вдоль продольной оси подвижного корпуса. Новый стыковочный механизм предназначен, прежде всего, для перспективного пилотируемого корабля, а также других кораблей и модулей.
Космические аппараты, стыковочный механизм, динамические нагрузки
Короткий адрес: https://sciup.org/143164959
IDR: 143164959 | УДК: 629.78.027.7
Kinematic scheme of a probe-cone docking mechanism for future advanced spacecraft
Docking mechanism of the probe-cone type have been using for about 40 years to dock Russian spacecraft and modules. The paper proposes a new kinematical scheme for such a mechanism in order to reduce contact dynamic loads and to provide a capability to dock with passive parts which have receiving cones of various configurations. The new mechanism has the following distinctive features that set it apart from the existing design. A two-stage friction clutch is used instead spring and electromagnetic brakes in axial damper. The universal joint of moving body was relocated to the base of docking mechanism and orientation of springs and electromagnetic brakes of lateral damper is changed to accommodate this new position. The aligning levers rollers of existing mechanism are replaced with a limit device that can move along longitudinal axes of moving body. The new docking mechanism is designed, primarily, for new advanced manned spacecraft, as well as other spacecraft and modules.
Текст научной статьи Кинематическая схема стыковочного механизма типа "штырь-конус" для перспективных космических кораблей
Введение подвижного ограничителя в схему стыковочного механизма
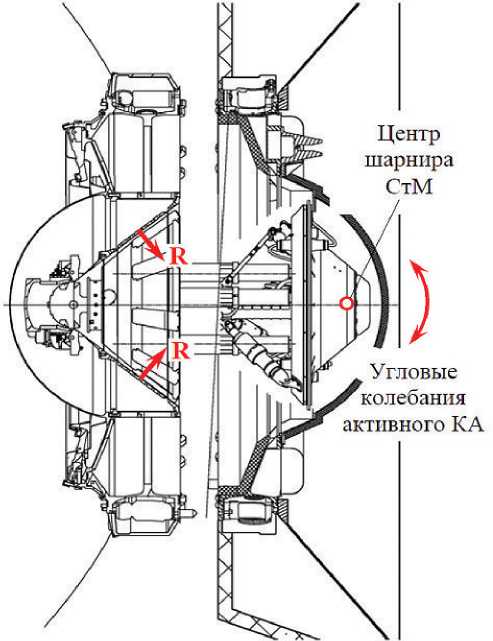
При дальнейшей модификации СтМ исключение рычажного механизма выравнивания и реализованный ранее перенос шарнира к основанию освободили место для подвижного ограничителя, который может перемещаться вдоль продольной оси подвижного корпуса. При полностью втянутой штанге ее головка упирается в ограничитель и удерживает его пружины в сжатом состоянии, а сам ограничитель — в конечном положении. Перед стыковкой штанга выдвигается, и ограничитель под действием освобождающихся пружин переводится в свое переднее положение. На рис. 3 показан общий вид СтМ, на котором показаны новое расположение центра шарнира, пружинные механизмы и кинематические цепи электромеханических тормозов бокового демпфера, развернутые навстречу линии действия контактной силы R входной грани приемного конуса и накладок подвижного ограничителя, который выдвинут своими пружинами в исходное переднее положение относительно подвижного корпуса СтМ.
При автономном втягивании штанги приводом тыльная сторона ее головки давит на ограничитель, сжимая его пружины и переводя его вместе со штангой в конечное втянутое положение. При стягивании агрегатов в процессе стыковки аналогичное действие на ограничитель оказывает сила его контактной реакции с поверхностью приемного конуса.
а)
ФрТ 14-
Просалка
б)
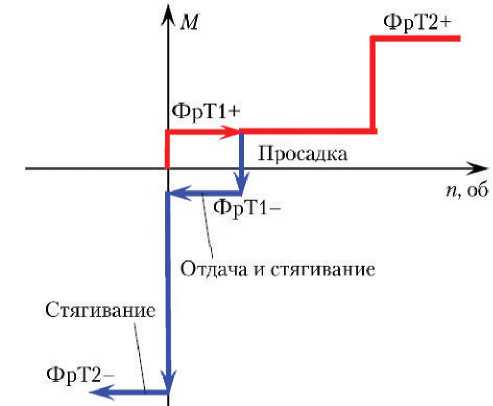
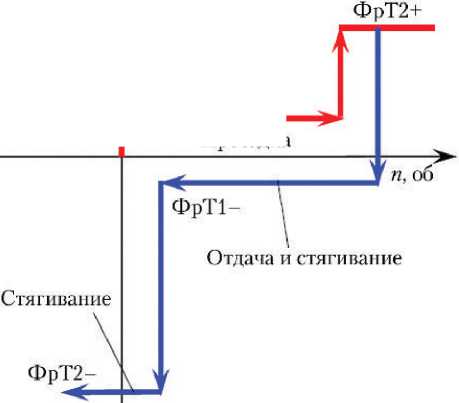
Рис. 2. Характеристики осевого демпфера нового стыковочного механизма: а — моменты сопротивления при штатной скорости сближения активного КА; б — моменты сопротивления при повышенной скорости сближения
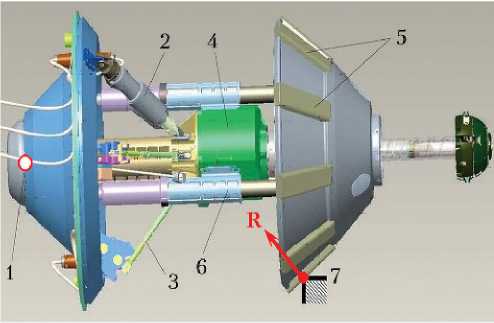
Рис. 3. Относительное расположение элементов конструкции в стыковочном механизме с новой кинематической схемой: 1 — центр шарнира; 2 — пружинный механизм; 3 — кинематическая цепь электромеханических тормозов бокового демпфера; 4 — подвижный корпус СтМ; 5 — накладки подвижного ограничителя; 6 — пружины подвижного ограничителя; 7 — входная грань приемного конуса; R — контактная сила реакции
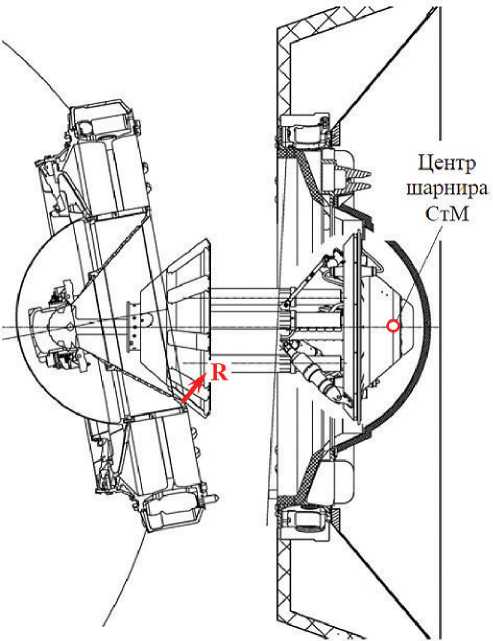
Переднее положение подвижного ограничителя определено с учетом обеспечения его контакта с входной гранью укороченного конуса при максимальной длине штанги (рис. 4, а), а ход пружин — с учетом достижения конечного положения при втягивании. Сила сжатия пружин ограничителя должна быть минимальной, но достаточной для обеспечения его плотного контакта с приемным конусом на стадии стягивания и выравнивания при угловых разворотах активного КА относительно пассивного. В этом случае шарнир СтМ может двигаться только вдоль оси пассивного КА, что позволяет электромагнитным тормозам и пружинам бокового демпфера непрерывно поглощать энергию угловых колебаний и обеспечить выравнивание объектов до совмещения стыковочных плоскостей агрегатов (рис. 4, б). Поэтому суммарные сила поджатия и жесткость пружин подвижного ограничителя были определены на основе многократного итерационного математического моделирования динамики процесса стыковки объектов с максимальными проектными инерционными характеристиками при штатной скорости втягивания штанги.
Вследствие выдвижения подвижного ограничителя в переднее положение увеличивается плечо контактной силы его взаимодействия с входной гранью приемного конуса относительно центра шарнира СтМ. Это способствует снижению амплитуды момента контактных сил при демпфировании относительных угловых движений стыкуемых объектов.
а)
б)
Рис. 4. Стыковка к укороченному приемному конусу с использованием нового стыковочного механизма: а — ограничение относительных угловых движений при поглощении кинетической энергии сближения; б — обеспечение неподвижности шарнира СтМ для демпфирования угловых колебаний и выравнивания активного корабля при стягивании
Динамика стыковкис нештатными начальными условиями
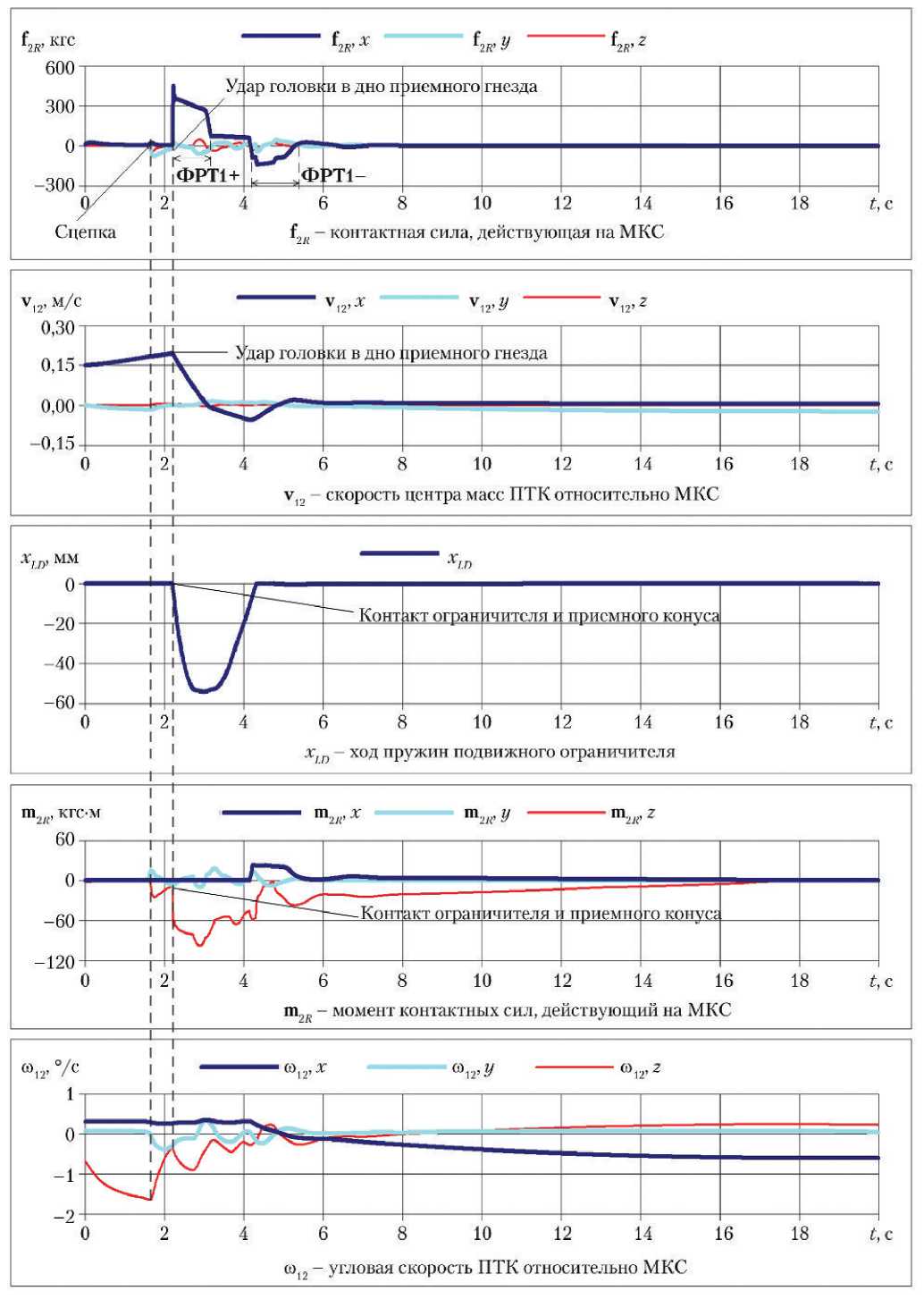
На рис. 5 и 6 приведены графики изменения некоторых параметров, характеризующих процесс стыковки перспективного транспортного корабля к стыковочному порту с укороченным приемным конусом узлового модуля МКС при максимальных допустимых значениях скорости сближения, угловых скоростей по тангажу и рысканию, бокового промаха и угловых рассогласований по рысканию, тангажу и крену; угловая скорость по крену составляет 50% от максимального значения. Такое сочетание параметров начальных условий является тестовым, более «тяжелым», чем штатное, так как в техническом задании на систему управления сближением определено, что не более чем один параметр начальных условий стыковки может принимать экстремальное значение. При штатном сближении процесс стыковки характеризуется меньшими динамическими нагрузками, т. е. значениями интерфейсных сил и моментов.
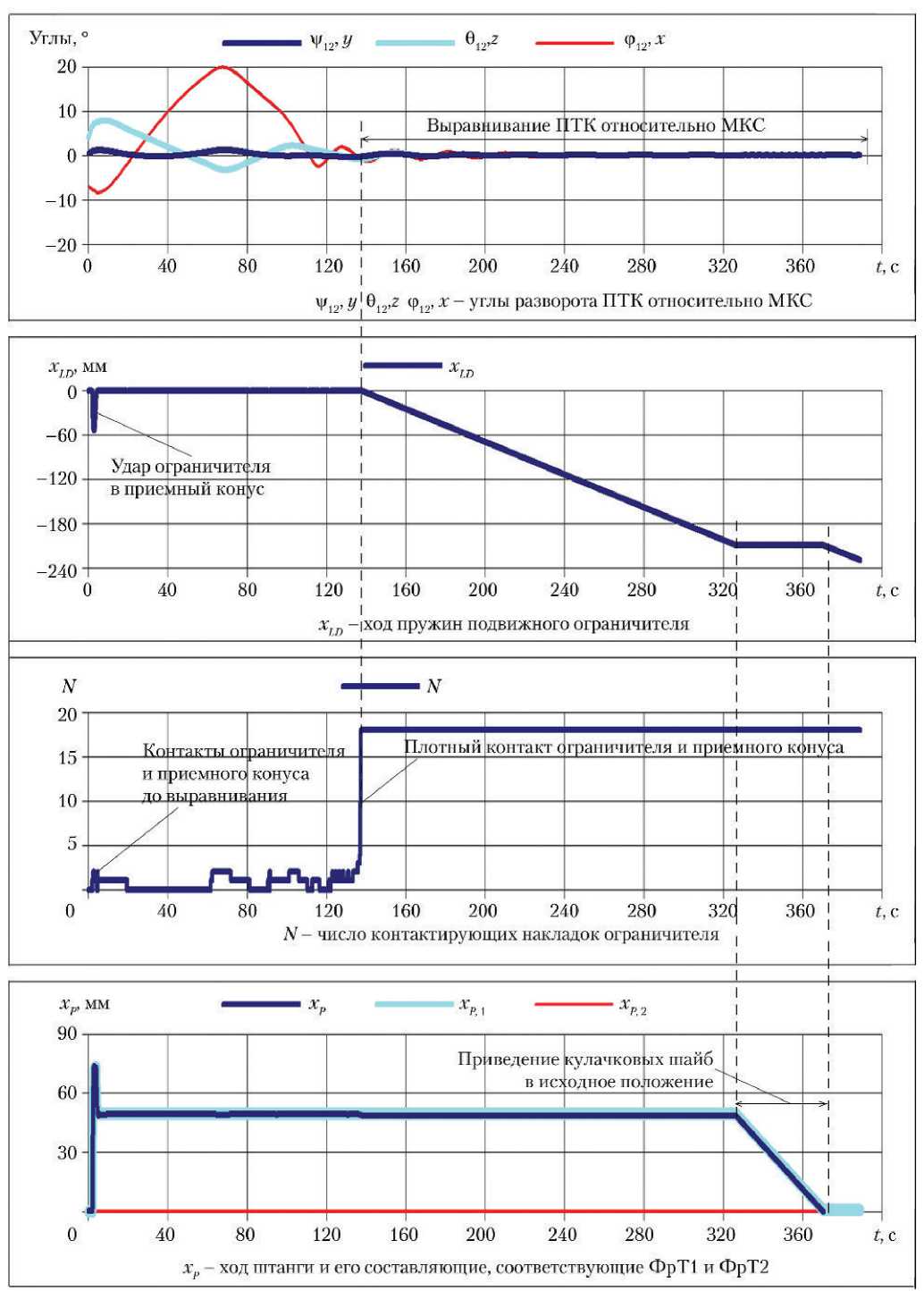
Моделирование выполнено от момента первого контакта до завершающей стадии стягивания (10 мм между стыковочными плоскостями). Полученные результаты показывают, что СтМ с новой кинематической схемой обеспечивает снижение амплитуды сил и моментов контактного взаимодействия при поглощении энергии относительного движения стыкуемых КА, ограничение в заданном диапазоне амплитуды относительных угловых движений при стыковке к укороченному приемному конусу, угловое выравнивание объектов при стягивании. Контакт выдвинутого в переднее положение подвижного ограничителя с приемным конусом может происходить до, во время и после удара головки штанги в дно приемного гнезда. В рассматриваемом варианте эти два события совпадают по времени (рис. 5). В результате пружины ограничителя преобразуют часть кинетической энергии сближения в потенциальную, последующее освобождение которой приводит к отдаче и обратному удару защелок головки штанги в упоры гнезда. При прямом ударе головки штанги в дно приемного гнезда амплитуда контактной силы ограничивается на прямом ходе первого фрикциона («ФрТ1+»). При обратном ударе защелок в упоры гнезда на обратном ходе этого фрикциона («ФрТ1–») ограничивается контактная сила и частично восстанавливается ход кулачковых шайб (рис. 6).
Окончательное выровненное положение стыковочных агрегатов, необходимое для их последующего жесткого соединения, а также для соединения электро- и гидроразъемов, дополнительно поддерживается силами сопротивления пружин толкателей каждого агрегата, действующими на стыковочную плоскость ответного. Контактные реакции ограничителя с приемным конусом и толкателей с ответными стыковочными плоскостями, определяемые сжатием их пружин, расталкивают активный и пассивный агрегаты на завершающей стадии стягивания. Сила расталкивания, действующая также на упоры гнезда приемного конуса, на защелки головки штанги и противодействующая стягиванию, преодолевается приводом СтМ. Когда она превысит величину, соответствующую моменту сопротивления «ФрТ1–», кулачковые шайбы первой ступени осевого демпфера начинают вращаться в обратном направлении вплоть до достижения механического упора в своем исходном положении. При этом длина штанги и, соответственно, сила сжатия пружин ограничителя и толкателей при вращении кулачковых шайб временно не изменяются (рис. 6). После восстановления полного углового хода кулачковых шайб относительное вращение фрикционных дисков ФрТ1 блокируется, и с этого момента дальнейшее втягивание штанги, сжатие пружин ограничителя и толкателей, соединение электро- и гидроразъемов обеспечивается большей силой, величину которой при передаче момента от привода к ШВП ограничивает обратный момент сопротивления ФрТ2.
Математическое моделирование показало, что при определенных сочетаниях предельно допустимых значений одновременно нескольких (обычно не менее четырех) параметров начальных условий стыковки подвижный ограничитель, выдвинутый в переднее исходное положение, может контактировать с приемным конусом до сцепки, но не препятствует последней. При минимальной осевой скорости сближения и одновременно при максимальных боковых и угловых скоростях, боковых и угловых рассогласованиях возможно преобразование большей части кинетической энергии сближения активного КА в потенциальную энергию сжатия пружин ограничителя и рассеяние лишь малой ее части на первой ступени осевого демпфера. Вследствие этого угловой ход кулачковых шайб при прямом ударе и вращении ФрТ1 в прямом направлении будет незначителен.
0,15
5 дар головки в дно приемного гнезда
0,00
-0,15
vl2 - скорость центра масс ПТК относительно МКС
-20
хт - ход пружин подвижного ограничителя m2/i, у
-60
«трУ to ..„2
12'
vl2, м/с
0,30- mM - момент контактных сил, действующий на МКС о12 — угловая скорость ПТК относительно МКС т2«
\п' “М о- m2/t, кге-м
60^-
-60 о
-120 + О
Конт акт ограп ичителя т г приемпс го конусх .
Рис. 5. Одновременный удар головки штанги в дно гнезда и подвижного ограничителя в приемный конус при стыковке пилотируемого транспортного корабля (ПТК) к узловому модулю МКС
-40
|
1 1 |
Конт |
ист огран |
1ЧИТСЛЯ и |
приемке |
го конуса |
|||||
|
1 1 |
||||||||||
|
1 1 _________1— |
1 |
Плотный
V12,y
Выравнивание ПТК относительно МКС
-10
Ч^-У
-60
Удар ограничителя
-120
в приемный кон ус
-180
ход пружин подвижного ограничителя
LD контакт(граничителя и приемного конура
32(|
N - число контактирующих накладок ограничителя ।
60-
30-
Контакты ограничите и приемного конуса до выравнивания ___
Углы, °
20 л
Ф12,Х х.п, мм
ОНГ
: - ход штанги и его составляющие, соответствующие ФрТ1 и ФрТ2
320 360
612,г фг„ х — углы разворота ПТК относительно МКС
160 200
160 200
160 200
240 280
240 280
360 । t, с
240 280
XF мм
90 л—
Приведение кулачковых шайб в ио одное положение
-240 + 0
-20 + 0
240 280
Рис. 6. Выравнивание активного КА и восстановление хода кулачковых шайб осевого демпфера во время стягивания при стыковке пилотируемого транспортного корабля к узловому модулю МКС
Последующее освобождение энергии пружин ограничителя приведет к обратному относительному движению активного агрегата и удару защелок головки штанги в упоры приемного гнезда. Демпфирование этого обратного удара будет невозможно, так как кулачковые шайбы могут вращаться в обратном направлении из положения, достигнутого при прямом ударе, только до своего упора в исходном положении. Вследствие этого возникнут пики контактной силы высокой частоты и амплитуды. Предотвратить опережающий контакт приемного конуса и ограничителя возможно быстрым выведением последнего с помощью его пружин в исходное положение с некоторой фиксированной временнóй задержкой после сцепки. Но такое быстрое выведение ограничителя может породить его удары в приемный конус и нежелательные дополнительные контактные нагрузки даже при малых начальных отклонениях и скоростях, свойственных обычным, штатным стыковкам.
Поэтому предпочтение отдано ранее описанному более простому и надежному варианту — подвижный ограничитель выводится в переднее положение предварительно, до начала стыковки. Такое решение основано на том, что сочетания предельных допустимых значений одновременно нескольких параметров начальных условий, вызывающие необходимость выдвижения подвижного ограничителя в переднее положение только после сцепки, являются маловероятными. Тем самым обеспечиваются меньшие нагрузки при штатной стыковке.
СтМ с подпружиненным подвижным ограничителем может обеспечить стыковку ко всем существующим типам пассивных агрегатов. Для этого необходимо, чтобы осевое расстояние от центра его шарнира до стыковочной плоскости активного стыковочного агрегата было выбрано с учетом осевого расстояния от дна приемного гнезда до стыковочной плоскости пассивного стыковочного агрегата соответствующего типа, что обеспечивает возможность стягивания агрегатов.
Заключение
Стыковочный механизм с новой кинематической схемой обеспечивает меньший уровень контактных нагрузок и может быть использован для стыковки перспективных кораблей и модулей к различным портам Российского сегмента МКС, а также при реализации программ исследования дальнего космоса.
Список литературы Кинематическая схема стыковочного механизма типа "штырь-конус" для перспективных космических кораблей
- Сыромятников В.С. Стыковочные устройства космических аппаратов. М.: Машиностроение, 1984. 216 с.
- Яскевич А.В. Изменения параметров стыковочного механизма, обеспечивающие снижение нагрузок при стыковке космических кораблей с Международной космической станцией//Космонавтика и ракетостроение. 2008. № 2. С. 93-100.
- Яскевич А.В. Комбинированные уравнения движения для описания динамики стыковки космических аппаратов с помощью системы «штырь-конус»//Космические исследования. 2007. Т. 45. № 4. С. 325-336.
- Yaskevich A. Real time simulation of contact interaction during spacecraft docking and berthing//Journal of Mechanics Engineering and Automation. 2014. V. 4. № 1. P. 1-15.
- Яскевич А.В. Математические модели гистерезиса, описывающие деформации механизмов для стыковки космических аппаратов. Электронный журнал «Труды МАИ». 2015. Вып. 83. 23 с. Режим доступа: http://mai.ru/science/trudy/index.php (дата обращения 02.06.2017 г.).
