Кинематическая структура современной техники исполнения большого оборота назад на перекладине как средства повышения скоростных параметров гимнаста

Автор: Шевчук Юлия Валентиновна
Журнал: Вестник Красноярского государственного педагогического университета им. В.П. Астафьева @vestnik-kspu
Рубрика: Теория и методика физического воспитания
Статья в выпуске: 3 (49), 2019 года.
Бесплатный доступ
Проблема и цель. Современная техника большого оборота назад на перекладине является одним из основных базовых элементов современной спортивной гимнастики и широко используется гимнастами. Однако если структурные различия между современной и классической техниками исполнения данного элемента очевидны, то в количественном плане они разработаны недостаточно. Для решения этой проблемы необходимо исследовать кинематическую структуру современного большого оборота назад с использованием современных инструментальных методов и сравнить ее с классической. Вышеизложенное обусловливает актуальность настоящего исследования. Цель статьи - исследовать кинематическую структуру современной техники исполнения большого оборота назад на перекладине в исполнении высококвалифицированного гимнаста. С использованием видеосъемки и современного программного обеспечения определить перемещения, скорости и ускорения опорных точек четырехзвенной модели тела спортсмена, а также суставные перемещения, угловые скорости и угловые ускорения. Построить графики опорных точек и углов. Методологию исследования составляют комплекс инструментальных методов исследования, в частности использование видеосъемки и программного обеспечения «MaxTrack» для обработки видеоматериалов, компьютерные технологии, а также теоретический анализ и обобщение данных специальной литературы зарубежных и отечественных ученых и программных документов. Результаты. Исследована кинематическая структура современной техники исполнения большого оборота назад на перекладине в исполнении высококвалифицированного гимнаста. Заключение. С использованием современных инструментальных методов определены перемещения, скорости и ускорения опорных точек четырехзвенной модели тела спортсмена, суставные перемещения, угловые скорости и ускорения. Построены графики опорных точек и углов. Доказано, что современная техника обеспечивает большую максимальную скорость в нижней точке маха и создает более благоприятные скоростные и структурные условия для выполнения последующих сложных перелетов и соскоков с перекладины.
Спортивная гимнастика, гимнасты, перекладина, большой оборот, современная техника, видеосъемка, программное обеспечение, кинематика, фазовая структура, анализ
Короткий адрес: https://sciup.org/144161788
IDR: 144161788 | УДК: 796.41 | DOI: 10.25146/1995-0861-2019-49-3-147
Kinematic structure of modern method of execution for giant felge backward on the bar as means for increasing speed parameters
Statement of the problem. Modern method of execution for giant Felge backward on the bar is one of the basic elements of modern artistic gymnastics, and is widely used by gymnasts. However, if the structural differences between modern and classical methods of execution for this element are obvious, in quantitative terms they are not developed enough. To solve this problem, it is necessary to study the kinematic structure of the modern giant Felge backward using modern instrumental methods and compare it with the classical one. The above said proves the relevance of this study. The purpose of this article is to explore the kinematic structure of the modern method of execution for of giant Felge backward on the bar in the performance of a highly skilled gymnast. With the use of video and modern software the study is meant to determine the movement, velocity and acceleration of the reference points of the four-link model of the athlete,s body, as well as joint movement, angular velocity and angular acceleration. Reference points and angles are aimed to be identified. The research methodology consists of a set of instrumental research methods, in particular, the use of video and software “MaxTrack” for processing video materials, computer technology, as well as theoretical analysis and synthesis of special literature data by international and Russian scientists and program documents. Research results. The kinematic structure is studied of the modern method of execution for giant Felge backward on the crossbar performed by a highly qualified gymnast. Conclusions. Using modern instrumental methods, movements, velocities and accelerations of reference points of the four-link model of the athlete»s body, articular movements, angular velocities and accelerations are determined. Plots of control points and angles are constructed. It is proved that a modern method provides greater maximum velocity at the lower point of the swing and creates more favorable velocity and structural conditions for the implementation of subsequent complex flights and jumps from the crossbar.
Текст научной статьи Кинематическая структура современной техники исполнения большого оборота назад на перекладине как средства повышения скоростных параметров гимнаста
DOI:
и др.]1. Однако при этом в основном использовались обычные кинокамеры с низкой скоростью

съемки (24 кадров / с), что давало большую погрешность измерений вследствие нестабильной лентопротяжки и фиксации пленки в фильмовом канале, а также дисторсий изображения по краям кадра. Прецизионные скоростные кинокамеры использовались в работе [Су-чилин 1989, с. 15; Хасин 2013, с. 33]2.
Для анализа техники была выбрана плоская механическая модель тела спортсмена, состоящая из четырех звеньев (две руки, туловище вместе с головой, два бедра и две голени вместе со стопами, соединенными идеальными плоскими шарнирами). Опорными точками модели являются проекции на плоскость съемки (боковую поверхность тела) осей, перпендикулярных плоскости съемки: продольная ось грифа (далее – кисть), ось плечевых суставов (далее - плечо), ось тазобедренных суставов (далее – бедро), ось коленных суставов (далее – колено), ось голеностопных (далее – голеностоп). Аналогично обозначены углы в суставах. Данные представлены в пикселях.
На рис. 1–13 представлены диаграммы опорных точек модели, графики перемещений, скоростей и ускорений опорных точек, углов, угловых скоростей и угловых ускорений четырехзвенной модели гимнаста при выполнении полного оборота.
Ниже представлена временная структура исследуемого движения.
Верхнее вертикальное положение (начало) T = 0 ms.
Правое горизонтальное положение T = 600 ms.
Нижнее вертикальное положение T = 920 ms.
Левое горизонтальное положение T = 1200 ms.
Верхнее вертикальное положение (конец) T = 1680 ms.
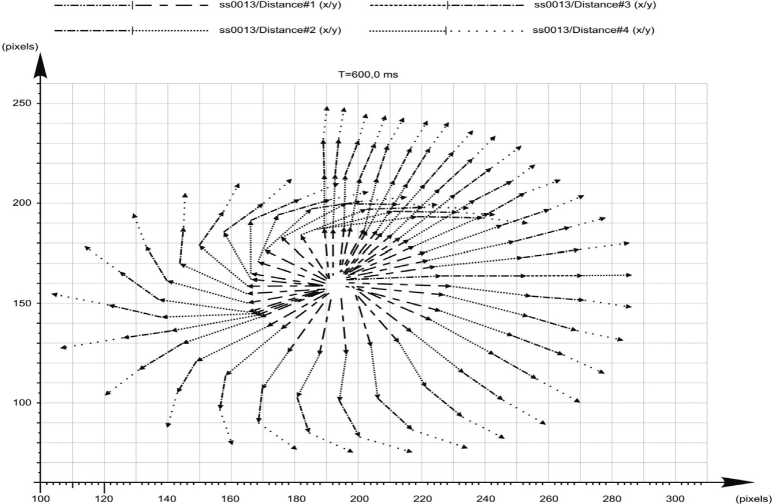
Рис. 1. XY-диаграмма полного большого оборота назад на перекладине
Fig. 1. XY-diagram of the total giant Felge backward on the crossbar
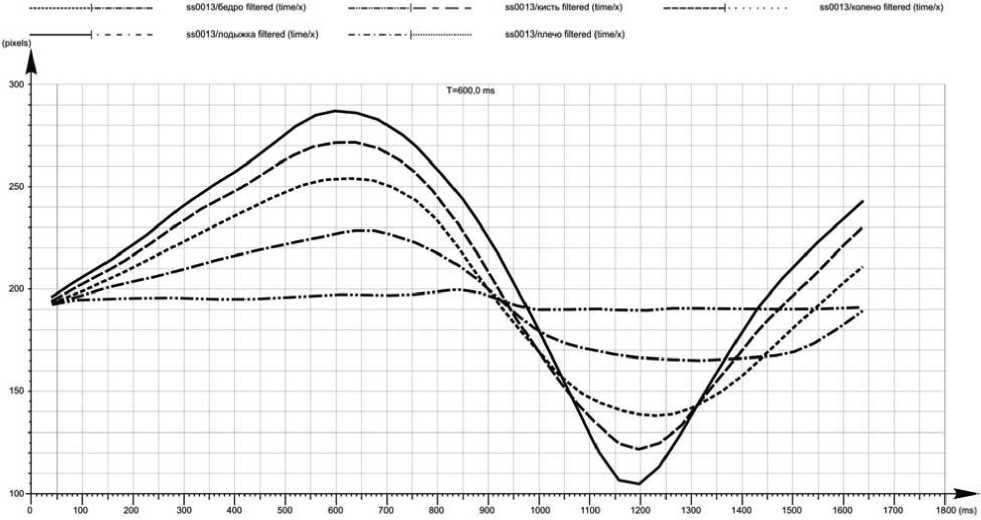
Рис. 2. Перемещение по X(t). Кисть ( ), плечо ( ), бедро ( ), колено ( ), лодыжка ( )
Fig. 2. Move along X(t). Hand ( ), shoulder ( ), thigh ( ), knee ( ), ankle ( )
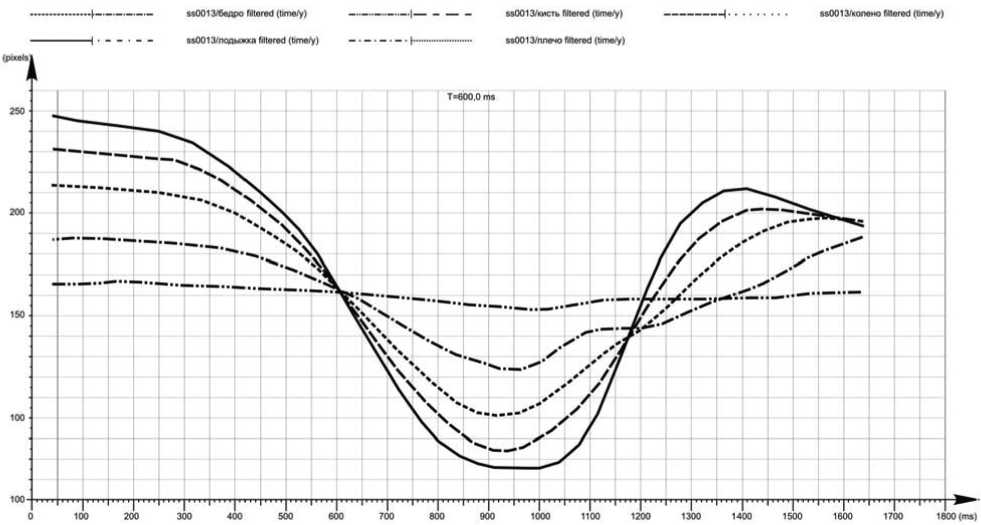
Рис. 3. Перемещение по Y(t). Кисть ( ), плечо ( ), бедро ( ), колено ( ), лодыжка ( )
Fig. 3. Move along Y(t). Hand ( ), shoulder ( ), thigh ( ), knee ( ), ankle ( )

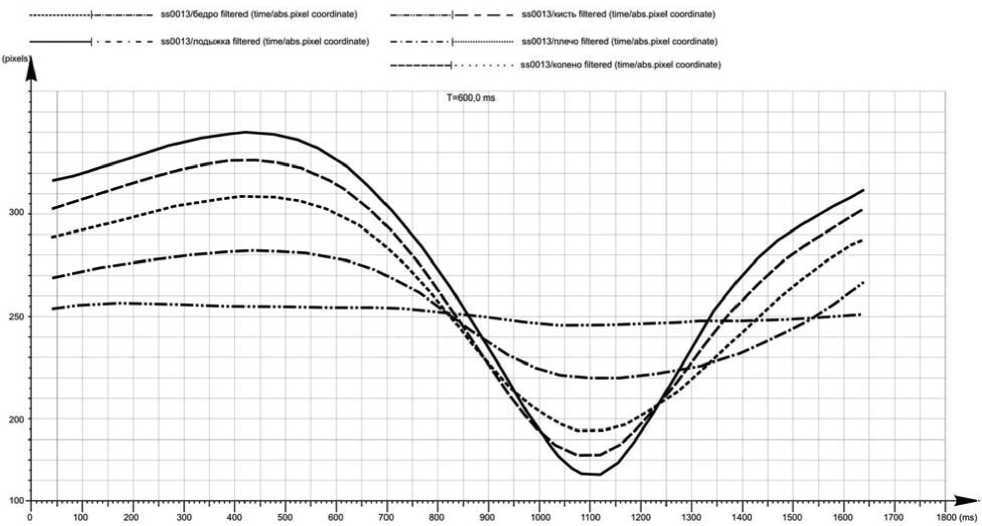
Рис. 4. Модуль перемещения. Кисть ( ), плечо ( ), бедро ( ), колено ( ), лодыжка ( )
Fig. 4. Movement module. Hand ( ), shoulder ( ), thigh ( ), knee ( ), ankle ( )
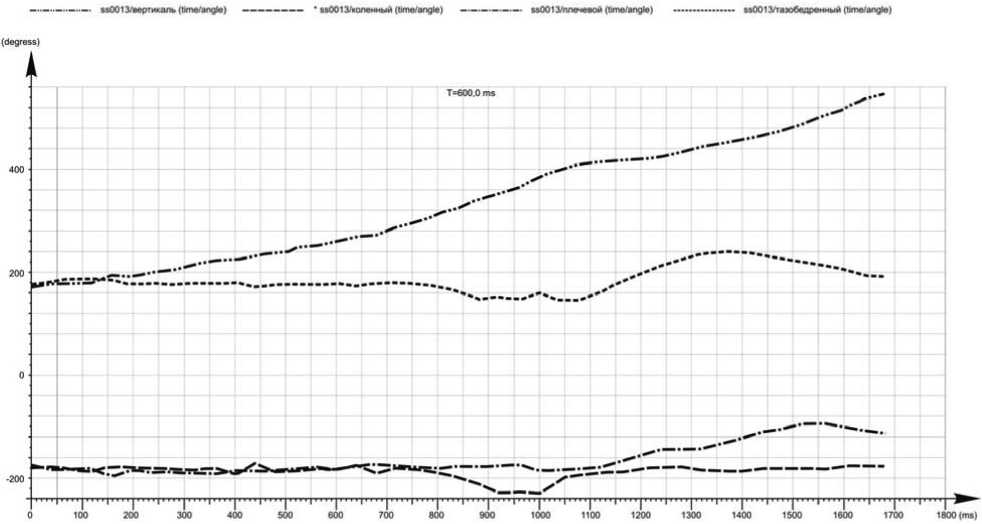
Рис. 5. Изменение величин углов. С вертикалью ( ), плечевой сустав ( ), тазобедренный сустав ( ), коленный сустав ()
Fig. 5. Changing the angle values. With vertical ( ), shoulder joint (), hip joint ( ), knee joint ()
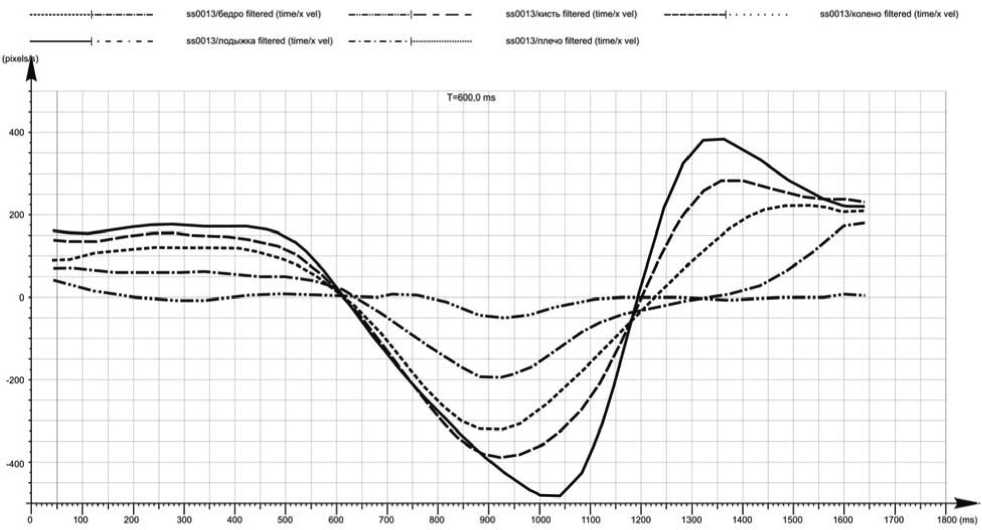
Рис. 6. Скорость по Х. Кисть ( ), плечо ( ), бедро ( ), колено ( ), лодыжка ( )
Fig. 6. Velocity by X. Hand ( ), shoulder ( ), thigh ( ),
knee ( ), ankle ( )
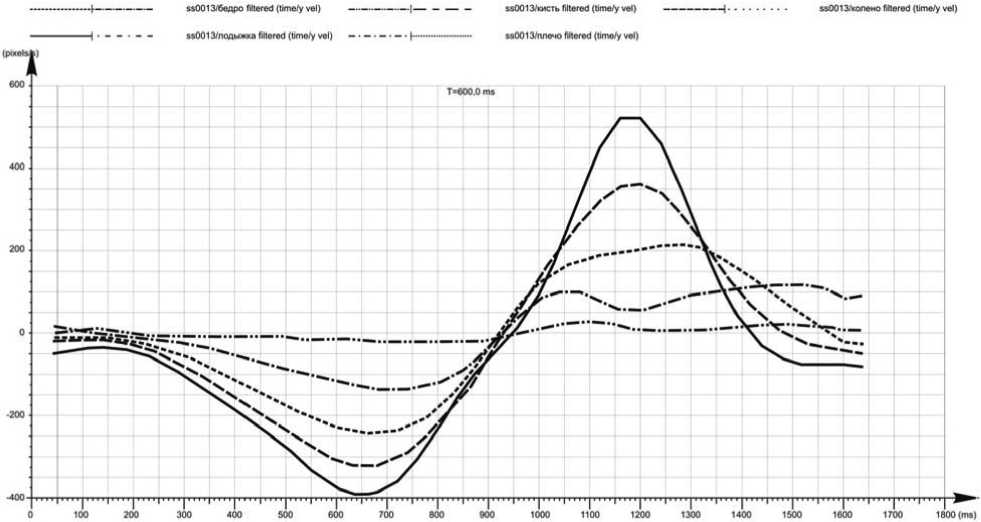
Рис. 7. Скорость по Y. Кисть ( ), плечо ( ), бедро ( ),
колено ( ), лодыжка ( )
Fig. 7. Velocity by Y. Hand ( ), shoulder ( ), thigh ( ),
knee ( ), ankle ( )
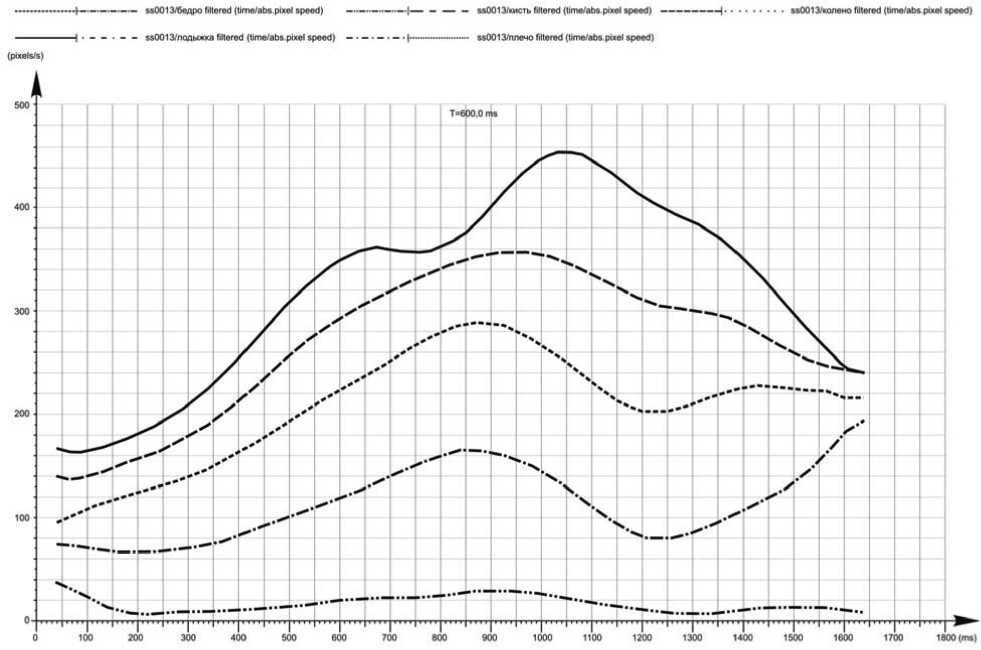
Рис. 8. Модуль скорости. Кисть ( ), плечо ( ), бедро ( ), колено ( ), лодыжка ( )
Fig. 8. Velocity Module. Hand ( ), shoulder ( ), thigh ( ), knee ( ), ankle ( )
................ Ь80013/таэобадренный filtered (bma/angular speed) —.—..—. sstolSfeeynwanb filtered (timei'angular speed)
-------- *б80013/*оленный filtered ItimeJangular speed) -------- ss0O13f плечевой filtered (time/anguiar speed)
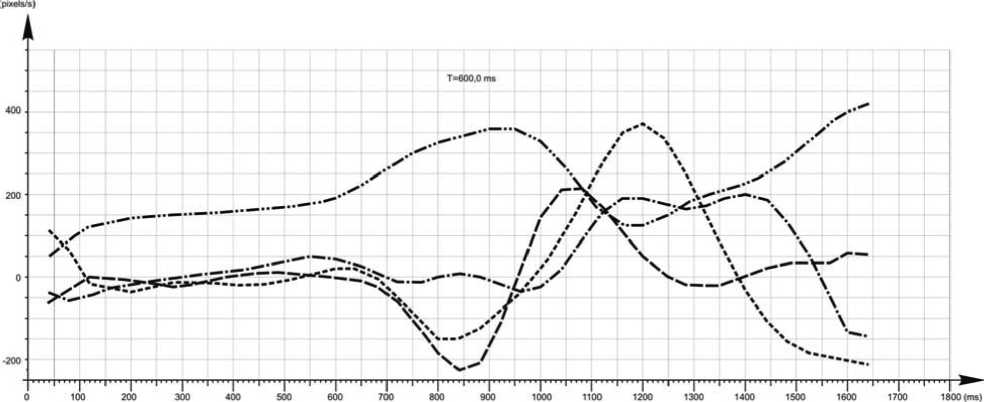
Рис. 9. Угловая скорость. С вертикалью ( ), плечевой сустав ( ), тазобедренный сустав ( ), коленный сустав ( )
Fig. 9. Angular velocity. With vertical ( ), shoulder joint ( ), hip joint ( ), knee joint ( )
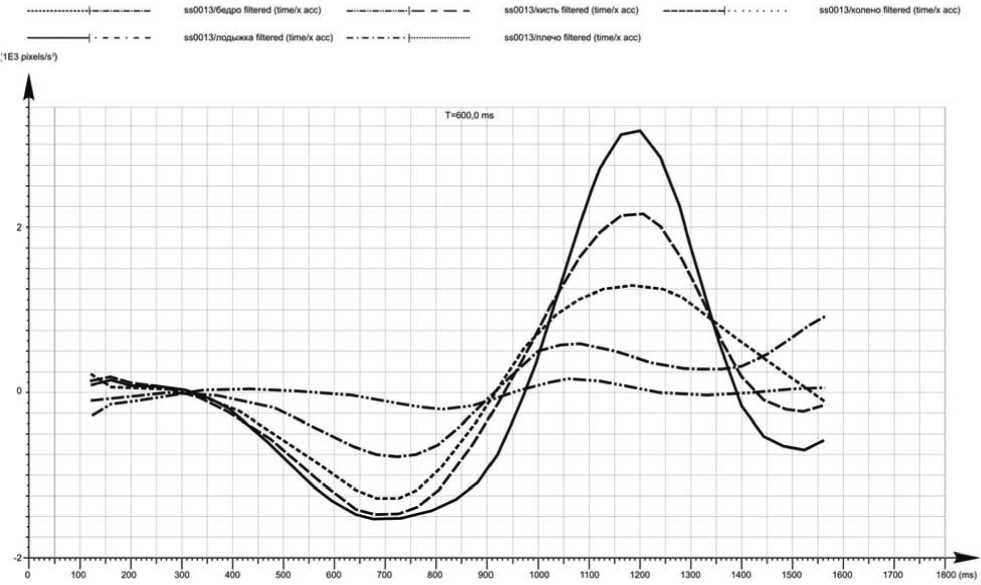
Рис. 10. Ускорение по Х. Кисть ( ), плечо ( ), бедро ( ), колено ( ), лодыжка ( )
Fig. 10. Acceleration by X. Hand ( ), shoulder ( ), thigh ( ), knee ( ), ankle ( )
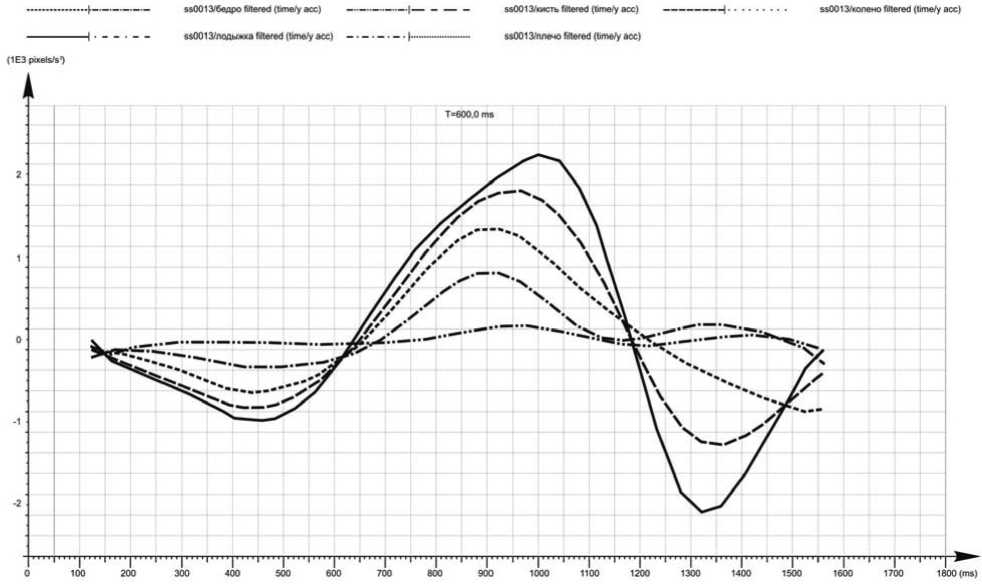
Рис. 11. Ускорение по Y. Кисть ( ), плечо ( ), бедро ( ), колено ( ), лодыжка ( )
Fig. 11. Acceleration by Y. Hand ( ), shoulder ( ), thigh ( ), knee ( ), ankle ( )
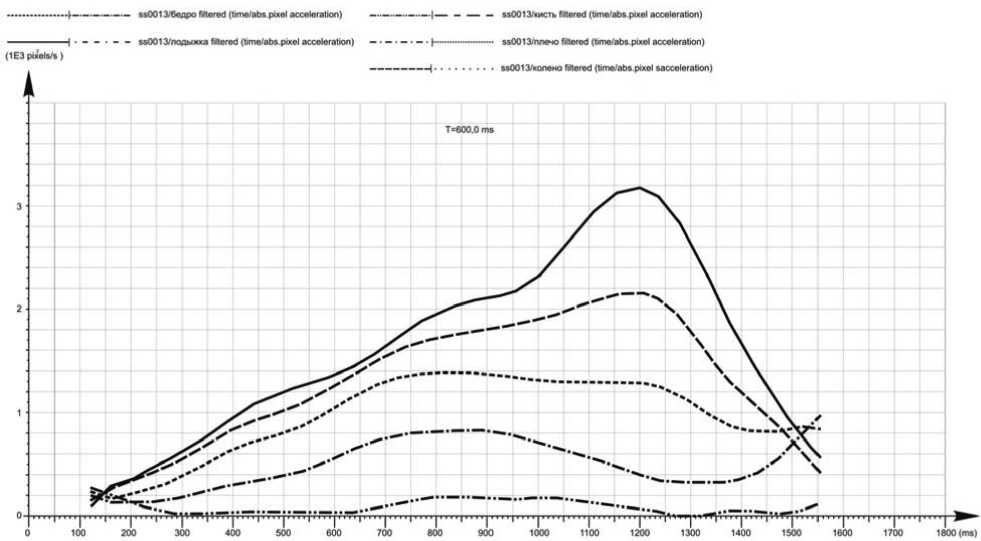
Рис. 12. Модуль ускорения. Кисть ( ), плечо ( ), бедро ( ),
колено ( ), лодыжка ( )
Fig. 12. Acceleration Module. Hand ( ), shoulder ( ), thigh ( ), knee ( ), ankle ( )
ssOC1 З/тазобедремный filtered (lime'anguiar асе.) ——.——— зб0013/вертикаль filtered (time/angutar асе.)
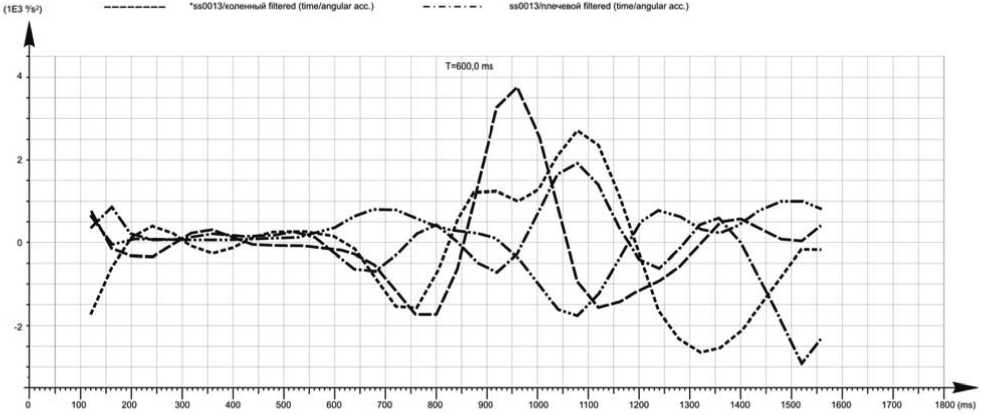
Рис. 13. Угловое ускорение. С вертикалью ( ), плечевой сустав ( ), тазобедренный сустав ( ), коленный сустав ( )
Fig. 13. Angular acceleration. With vertical ( ), shoulder joint ( ), hip joint ( ), knee joint ( )
Результаты сравнительного анализа временной структуры классической и современной техники исполнения большого оборота назад на перекладине
Results of comparative analysis of time structure for classical and modern method of execution for giant Felge backward on the crossbar
|
Положение тела |
Классическая техника, мс |
Современная техника, мс |
|
Вертикальное вниз головой (начальное) |
0.0 |
0,0 |
|
Горизонтальное справа |
0,766 |
600 |
|
Вертикальное внизу |
0,1120 |
920 |
|
Горизонтальное слева |
0,1400 |
1200 |
|
Вертикальное вниз головой (конечное) |
2160 |
1680 |
Как видно из таблицы, современная техника исполнения большого оборота назад на перекладине характеризуется меньшим временем исполнения упражнения по сравнению с классической (77,8 %), большими скоростями и ускорениями. Фазовая структура по составу в обоих случаях аналогична: разгон, замах, бросок, финал. Однако в финальной фазе современного варианта техники исполнения гимнасты не выпрямляются в стойку на руках в верхнем положении, а проходят его в сильно согнутом в плечевых суставах положении (порядка 90˚), выпрямляясь под 45˚ (сравн. рис. 1 и 14). На последнем рис. 14 представлена фазовая х(у)-диаграмма классического способа большого оборота назад на перекладине в исполнении высококвалифицированного гимнаста. Различия в технике очевидны.

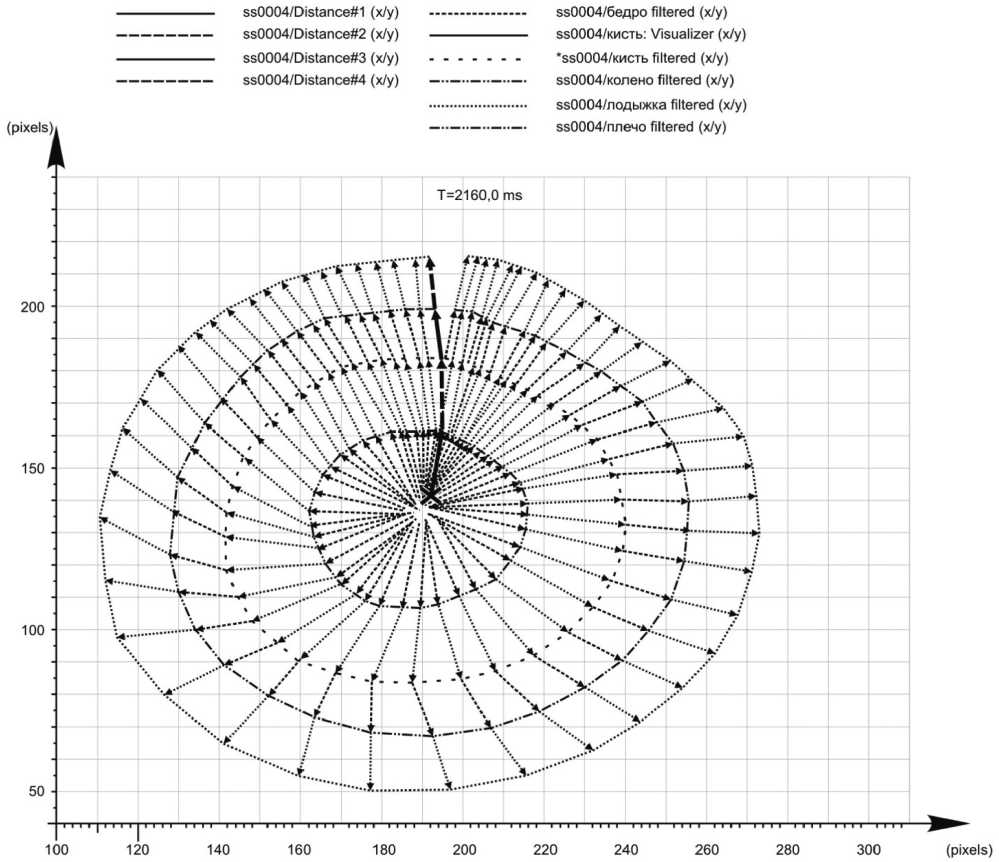
Рис. 14. Фазовая XY-диаграмма классического способа большого оборота назад на перекладине в исполнении высококвалифицированного гимнаста
Fig. 14. Phasal XY-diagram of the classical method of giant Felge backward on the bar performed by a highly skilled gymnast

Таким образом, с использованием современных инструментальных методов исследована кинематическая структура современной техники исполнения большого оборота назад на перекладине и сравнена с классической техникой в исполнении высококвалифицированного гимнаста. Выявлено, что современная техника обеспечивает большую максимальную скорость в нижней точке маха и создает более благоприятные скоростные и структурные условия для выполнения последующих сложных перелетов и соскоков с перекладины.
Список литературы Кинематическая структура современной техники исполнения большого оборота назад на перекладине как средства повышения скоростных параметров гимнаста
- Аркаев Л.Я., Сучилин Н.Г., Савельев B.C. Педагогико-биомеханический анализ техники спортивных движений на основе программно-аппаратного видеокомплекса // Теория и практика физической культуры. 1996. № 4. С. 12-20. URL: http://lib.sportedu.ru (дата обращения: 10.06.2019).
- Бернштейн Н.А. О построении движений. М.: Медгиз, 1947. 255 с. URL: https://eknigi.org (дата обращения: 13.06.2019).
- Бранков Г. Основы биомеханики / пер. с болг. М.: Мир, 1981. 254 с. URL: http://wikipower.ru (дата обращения: 08.07.2019).
- Гавердовский Ю.К. Упражнения на перекладине. М.: ФиС, 1975. 173 с. URL: https://www.twirpx.com (дата обращения: 15.07.2019).
- Гавердовский Ю.К. Обучение спортивным упражнениям. М.: ФиС, 2007. 912 с. URL: https://gym.sportedu.ru (дата обращения: 10.06.2019).
