Кинематический анализ многозвенного рычажного грейферного механизма

Автор: Гебель Елена Сергеевна, Джомартов Асылбек Абдразакович
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Машиностроение и машиноведение
Статья в выпуске: 1-2 т.19, 2017 года.
Бесплатный доступ
Статья посвящена решению задачи кинематического анализа многозвенного рычажного грейферного механизма, рабочие кромки челюстей которого перемещаются по прямой линии. Преимуществом исследуемой схемы механизма перед традиционными является прямолинейное движение выходного звена на относительно большом участке. В работе для заданных значений свободных кинематических параметров грейфера рассчитаны основные кинематические характеристики: положение, скорость и ускорение. С учетом протяженности прямолинейного участка рассчитаны параметры, обеспечивающие возможность достижения высокой точности прямолинейного движения.
Грейфер, многозвенный рычажный механизм, кинематика
Короткий адрес: https://sciup.org/148205025
IDR: 148205025 | УДК: 621.01
Kinematic analysis of multilink lever clamshell mechanism
Paper is devoted to the solution of a task of kinematic analysis of the multilink lever clamshell mechanism which working edges of jaws move in a straight line. Advantage of the studied scheme of the mechanism before traditional is the rectilinear movement of output link on rather big site. In work for preset values of free kinematic parameters of the grab the main kinematic characteristics are calculated: situation, speed and acceleration. Taking into account the extent of a straight section the parameters providing a possibility of achievement of high precision of the rectilinear movement are calculated.
Текст научной статьи Кинематический анализ многозвенного рычажного грейферного механизма
а)
б)
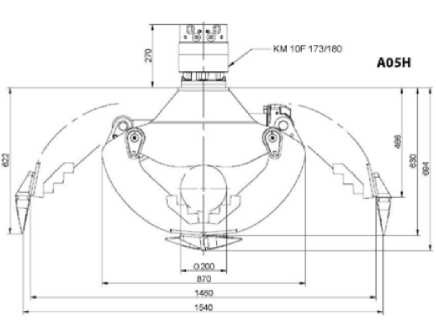
Рис. 1. Схемы двухчелюстных грейферных ковшей: а) моедль селекторного захвата SPS 150; б) многоцелевой грейфер серии A03H/A05H линией действия усилия в замыкающем канате. В результате возникает вращающий момент, стремящийся повернуть челюсти вокруг шарнира, с помощью которого они прикреплены к траверсе. Дополнительное воздействие оказывают составляющие от веса головки. В результате происходит перерезание зачерпываемого материала контуром, образуемым ножом и боковинами челюстей. Возможны несколько вариантов развития событий. В первом случае, если усилие на режущих кромках, создаваемое вращающим моментом челюстей, будет достаточным, чтобы преодолеть суммарное сопротивление внедрению челюсти в материал, то они будут перемещаться в материале. Иначе, если усилие окажется недостаточным, то при стягивании полиспаста будет происходить подъем траверсы, поворот ножевой кромки челюсти вокруг шарнира и одновременное горизонтальное перемещение ножевой кромки к оси грейфера. Если усилие окажется весьма малым по сравнению с сопротивлением внедрению, то при подъеме нижней траверсы ножевая кромка будет перемещаться по наклонной плоскости скольжения и быстро выходить из материала. Когда грейфер расположен на твердой поверхности, нож челюсти будет перемещаться по горизонтали.
На основе вышеизложенных особенностей работы грейферного механизма в Институте механики и машиноведения им. У .А. Джолдасбекова разработана структурная схема компактного прямолинейно-направляющего многозвенного рычажного механизма (рис. 1) с большой протяженностью прямолинейного участка и с параметрами, обеспечивающими возможность достижения высокой точности движения [4, 5]. Симметричные челюсти рычажного механизма грейферного ковша содержат входной ползун G (звено 7), шатун GH (звено 6), промежуточное коромысло Н01А (звено 1), основное коромысло OED (звено 7), трехшарнирный рычаг АВС (звено 2), промежуточный шатун СЕ (звено 4) и челюсти BDP с рабочей кромкой в точке Р (звено 3).
рычажного грейферного механизма оценить траекторию, скорость и ускорение движения челюсти с рабочей кромкой Р, а также размеры прямолинейного участка и максимальное отклонение.
Математическая модель кинематического анализа. Перемещение входного ползуна G вызывает горизонтальное - прямолинейное перемещение рабочей точки Р по прямой РР* (рис. 2). В результате решения задачи кинематического синтеза многозвенного рычажного механизма известны значения геометрических параметров, длина отрезка /ор и начальное значением S&, точки G ползуна 7 и координатой неподвижной точки Oi в системе XOY. Задавшись траекторией точки Р и длинами звеньев открытого четырехзвенника OiABD определим круговою квадратичную точку D на плоскости ВР, параметры которой зададим с помощью координат точки В, а ориентацию относительно неподвижной декартовой системы хОу - углом Фвр :
Фвр = arctg
А
О1
в
А
P =
M^
О
+ 2Oy
'16
О
о
О
со^ад «ш^л
О
-кт^од cos 4^
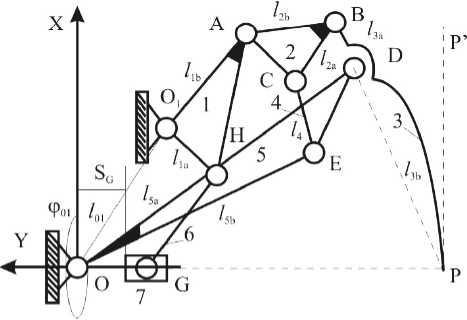
Рис. 2. Многозвенный рычажный грейферный механизм
На рис. 2 введены обозначения для правой челюсти грейферного ковша геометрических параметров (механизм левой челюсти симметричен относительно вертикальной оси симметрии - оси OY), значения которых определены в результате решения задачи кинематического синтеза. Требуется для заданной структурной схемы многозвенного
о о
о
о
COS^4B sin^
-sm^ cos^B
Положение звеньев ОАН и ABC описывается с помощью углов Ф^а и Фав в матрицах Z^ и Мав определяются из уравнений замкнутости треугольников GHOi и АВР:
/2 +Р -/2 С\Н ' C\G 'он
"0,0 'О1Н
Список литературы Кинематический анализ многозвенного рычажного грейферного механизма
- Ципурский, И.Л. Экскаватор с рабочим оборудованием драглайна и грейфера : учебное пособие. -М.: Московский государственный строительный университет, ЭБС АСВ, 2011. 56 с.
- Компания «Техногрупп». Грейферы и захваты (режим доступа: http://www.tehno-group.com/files/ru/katalogs/Katalog-Greferi_zahvati.pdf. Дата доступа: 01.03.2017 г.)
- Шишкин, А.В. Усовершенствованная конструкция грейферного оборудования для очистки мелиоративных сооружений//Научное обозрение. 2010. №5. С. 13-23.
- Кабашев, Р.А. Ковш грейферный гидравлический экскаватора ЭО-3122А/Р.А. Кабашев, Б.И. Журсенбаев, З.Д. Кадержанова, Е.Б. Журсенбаев//Научно-технический сборник «Новости науки Казахстана», 2002. Вып. 3. С. 45-46.
- Журсенбаев, Б.И. Предварительный патент «Гидравлический грейфер»//Казахстанский институт патентной экспертизы, №13889 от 05.11.2003.
- Иванов, К.С. Кинетостатика грейферного захвата/К.С. Иванов, Б.И. Журсенбаев, З.Д. Кадержанова//Поиск. 2004. Вып. 3. С. 232-239.
