Кинематический анализ многозвенного рычажного механизма грейфера

Автор: Гебель Елена Сергеевна
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Машиностроение и машиноведение
Статья в выпуске: 4-1 т.19, 2017 года.
Бесплатный доступ
Статья посвящена решению задачи кинематического анализа многозвенного рычажного грейферного механизма, рабочие кромки челюстей которого перемещаются по прямой линии. Преимуществом исследуемой схемы механизма перед традиционными является прямолинейное движение выходного звена на относительно большом участке. В работе для заданных значений свободных кинематических параметров грейфера рассчитаны основные кинематические характеристики: положение, скорость и ускорение. Установлено, что отклонение функции перемещения рабочей точки (кромки челюстей) рассматриваемой конструкции грейферного ковша от требуемой прямолинейной траектории не превышает 3%.
Грейфер, многозвенный рычажный механизм, кинематика
Короткий адрес: https://sciup.org/148205288
IDR: 148205288 | УДК: 621.01
Kinematical analysis of the multi-linkage mechanism of a grapple
The article is devoted to the solution of the kinematic analysis of a multi-linkage lever mechanism of a grapple, the working edges of which are moved along a straight line. The advantage of the scheme of the mechanism under consideration before the traditional one is the straight-line motion of the output link in a relatively extended distance. In work, for the given values of the free kinematic parameters of the grapple, the main kinematic characteristics are calculated namely position, velocity and acceleration. It is established that the deviation of the function of the displacement of the operating point (the jaw edge) of the grapple under consideration from the required straight-line trajectory does not exceed 3%.
Текст научной статьи Кинематический анализ многозвенного рычажного механизма грейфера
Из различных типов оборудования, задействованного в земляных работах, наибольшую часть занимают машины, оснащенные грейферным захватом, благодаря широкому спектру выполняемых технологических операций. Согласно общепринятому определению [1], грейфер (от нем. Giecifer – хватать) – это грузозахватное приспособление, предназначенное для оборудования грузоподъемных и транспортных механизмов (подъемных кранов, погрузчиков, экскаваторов и т. п.), снабженное поворотными челюстями для захвата груза. Грейферы применяют для перегрузки и транспортирования на небольшие расстояния сыпучих и кусковых грузов, труб, лесоматериалов и т. п. Грейфер для сыпучих и кусковых грузов работает по принципу подгребания и захвата груза. Для лучшего забора груза, челюсти оснащаются зубьями. Наиболее распространены грейферы емкостью 1.0-2.0 м3. Грейфер для перегрузки длинномерных грузов (бревен, балансов, труб и т. п.) по устройству аналогичен грейферу для сыпучих грузов, но имеет челюсти специальной конструкции — каждая состоит из двух когтеобразных захватов, отогнутых вниз и соединенных балкой. Применение грейферов позволяет полностью механизировать операции транспортировки различных грузов.
Вопросы, связанные с модернизацией строительной техники, активно обсуждаются научным сообществом: Шишкин А.В. [3], Кабышев Р.А. [4], Журсенбаев Б.И. [5], Ким [7], Исаков В.С. [9], Винс [10] и др. Анализ работ зарубежных авторов показал, что основное внимание уделяется вопросам совершенствования систем и алго-
ритмов управления, так в статье [10] приводятся результаты анализа гибридной системы управления руки экскаватора с точки зрения объема перемещаемого груза и расхода топлива. Как отмечают авторы статьи, полученные результаты применимы к гидравлическим промышленным манипуляторам.
Предложенный Серсом [8] алгоритм динамического моделирования экскаватора, оснащенного роторным ковшом для добычи полезных ископаемых, учитывает информацию о вибрациях и нагрузках в наиболее ответственных узлах машины. Верификация используемой математической модели системы управления доказала ее адекватность и хорошее приближение к измеренным значениям собственных частот.
Работы профессора Исакова В. С. и его учеников [9] направлены на проектирование рациональной конструкции рабочих органов одноковшовых канатных экскаваторов. Для снижения потерь зачерпнутого грунта на участке подъема и переноса его к месту выгрузки экскаватор оснащается неприводным поворотным механизмом, при этом для обоснования структуры рычажного механизма с переменной длиной звеньев авторами получены математические модели для решения задач кинематического синтеза и анализа.
Анализ конструкций двухстворчатых грейферных ковшей экскаваторов [1, 2, 3, 4], предназначенных для выполнения земляных ландшафтных работ, например, рытья фундаментов, котлованов, кабельных траншей и т.д., показал, что траектория движения режущей кромки (рис. 1) представляет собой дугу окружности. Как следствие на финишной стадии требуется вручную формировать профиль грунта, что увеличивает затраты времени и трудоемкость операции, и как следствие приводит к удорожанию себестоимости работ.
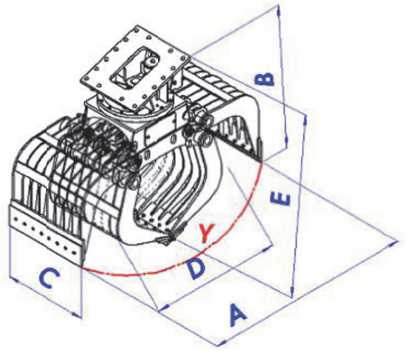
а
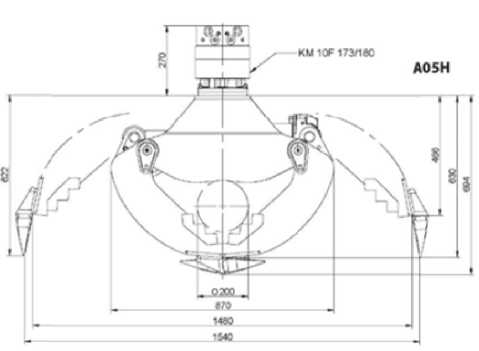
б
Рис. 1. а – модель двухчелюстного грейферного ковша селекторного захвата SPS 150; б – модель двухчелюстного многоцелевого грейферного ковша серии A03H/A05H
Производственные наблюдения рабочего процесса земляных ландшафтных работ, выполняемых экскаваторами с грейферным ковшом, показали, что главной причиной ограниченной области применения рассматриваемой модификации строительной техники и снижения ее эксплуатационной производительности является ограниченный участок прямолинейного движения режущей кромки ковша.
ПОСТАНОВКА ЗАДАЧИ
При смыкании челюстей грейфера центр тяжести механизма с нормальным раскрытием расположен не на одной прямой с линией действия усилия в замыкающем канате. В результате возникает вращающий момент, стремящийся повернуть челюсти вокруг шарнира, с помощью которого они прикреплены к траверсе. Дополнительное воздействие оказывают составляющие от веса головки. В результате происходит перерезание зачерпываемого материала контуром, образуемым ножом и боковинами челюстей. Возможны несколько вариантов развития событий. В первом случае, если усилие на режущих кромках, создаваемое вращающим моментом челюстей, будет достаточным, чтобы преодолеть суммарное сопротивление внедрению челюсти в материал, то они будут перемещаться в материале. Иначе, если усилие окажется недостаточным, то при стягивании полиспаста будет происходить подъем траверсы, поворот ножевой кромки челюсти вокруг шарнира и одновременное горизонтальное перемещение ножевой кромки к оси грейфера. Если усилие окажется весьма малым по сравнению с сопротивлением внедрению, то при подъеме нижней траверсы ножевая кромка будет перемещаться по наклонной плоскости скольжения и быстро выходить из материала. Когда грейфер расположен на твердой поверхности, нож челюсти будет перемещаться по горизонтали.
На основе вышеизложенных особенностей работы грейферного механизма в Институте механики и машиноведения им. У.А. Джолдасбеко-ва разработана структурная схема компактного прямолинейно-направляющего многозвенного рычажного механизма (рис. 1) с большой протяженностью прямолинейного участка и с параметрами, обеспечивающими возможность достижения высокой точности движения [4, 5].
Симметричные челюсти рычажного механизма грейферного ковша содержат входной ползун G (звено 7), шатун GH (звено 6), промежуточное коромысло HО1 А (звено 1), основное коромысло OED (звено 7), трехшарнирный рычаг АВС (звено 2), промежуточный шатун СЕ (звено 4) и челюсти BDP с рабочей кромкой в точке Р (звено 3).
На рис. 2 введены обозначения для правой челюсти грейферного ковша геометрических параметров (механизм левой челюсти симметричен относительно вертикальной оси симметрии – оси OY), значения которых определены в результате решения задачи кинематического синтеза.
Требуется для заданной структурной схемы многозвенного рычажного грейферного механизма оценить траекторию, скорость и ускорение движения челюсти с рабочей кромкой Р , а также размеры прямолинейного участка и максимальное отклонение.
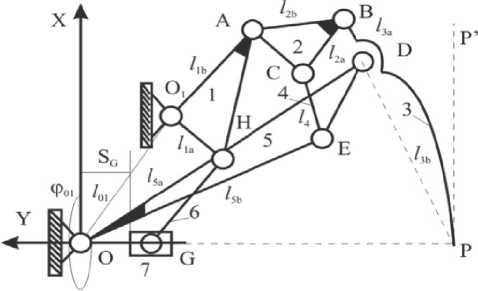
Рис. 2. Многозвенный рычажный грейферный механизм
МАТЕМАТИЧЕСКАЯ МОДЕЛЬКИНЕМАТИЧЕСКОГО АНАЛИЗА
Согласованное движение звеньев пятизвен-
Перемещение входного ползуна G вызывает горизонтальное – прямолинейное перемещение рабочей точки Р по прямой PP ' (рис. 2). В результате решения задачи кинематического синтеза многозвенного рычажного механизма известны значения геометрических параметров, длина отрезка lOP и начальное значением SG 0 точки G ползуна 7 и координатой неподвижной точки O 1 в системе XOY . Задавшись траекторией точки Р и длинами звеньев открытого четы-рехзвенника O 1 ABD определим круговою квадратичную точку D на плоскости BP , параметры которой зададим с помощью координат точки В, а ориентацию относительно неподвижной де-
ника O 1 ABDO обеспечивается дополнительным шатуном EC . Определим в обращенном
движении (при неподвижном звене ODE ) круговую квадратичную точку С в плоскости ABC и центр E ее вращения. Параметры звена ABC в ее обращенном движении определим следующим образом:
где
|
1 |
0 |
0 |
|
0 |
cos Ф OD |
sin Ф OD |
|
0 |
sin Ф OD |
cos Ф OD |
YT
V XD
Y O
^^^^^^^»
Ф OD = arctg
X o 7
Координаты шарнира D определяются урав-
нением:

1 0
где
ZB = 0
cos Ф ВР sin Ф вр
— sin Ф вр cos ф вр
Г Yp - YB 7
Фвр = arctg vxp xb7
Положение звеньев OxAH и ABC описывается с помощью углов ф 0 1 A и Ф АВ в матрицах ZO и MAB определяются из уравнений замкну-тос 1 ти треугольников GHO 1 и ABP :
Ф о 1 А = Ф о , H + Ф но 1 A =
= arccos
rlг
1 о 1 H
+ /2 -Z2
+ о О 1 G lGH
V O1G 1 G O3, H
+ ф но 1 A ;
Фав = Фар + arccos V
I 2 +/2 _/2 1AP + ABB APP
2 1 ар
.1 AB
Г
= arctg
V
Y P
X P
X А 7
+ arccos
V
Iг
AP
+ l
AB
/ 2
BP
\
2 lAP
• l
AB
ЧИСЛЕННЫЙ ЭКСПЕРИМЕНТ
Численное решение задачи кинематического анализа многозвенного рычажного грейферного механизма с целью проверки адекватности предложенной математической модели получим для следующих значений геометрических параметров [6]: 1 01=0,94 м; l ^a =0,58 м; Ць =0,94 м; =0,52 м; l =0,94 м; =0,29 м; l =1,33
2 a 2 b 3 a 3 b
м; l 4 =0,45 м; l 5 a =2,28 м; l 5 b =2,02 м.
По расчетным зависимостям установлено, что при длине раскрытия ковша L = 200 мм высота зачерпывания h составляет 70 мм. Кривая зачерпывания исследуемой конструкции грейферного ковша показана на рис. 3.
В результате решения задачи кинематического анализа построены графики перемещения, скорости и ускорения кромки ножа (точка P ) правой челюсти грейферного ковша (рис. 4 – 6). Для второй челюсти ковша кривые получаются аналогичными.
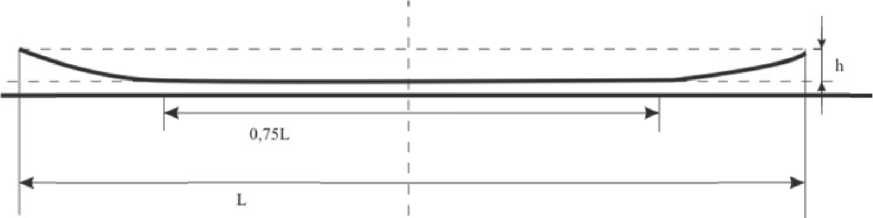
Рис. 3. Кривая зачерпывания грейферного ковша
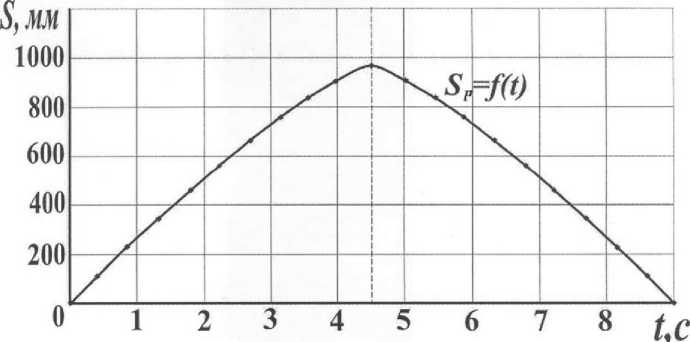
Рис. 4. Диаграмма перемещения рабочей точки Р при раскрытии и закрытии челюсти ковша
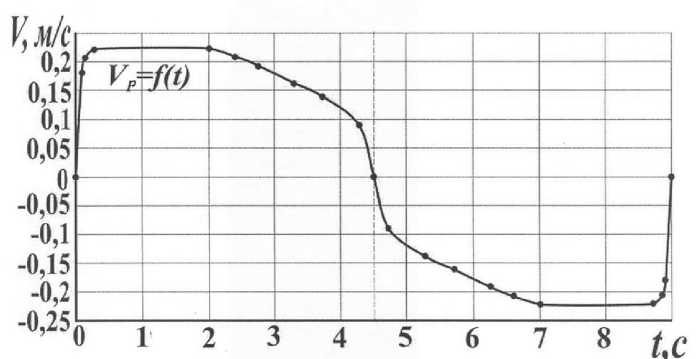
Рис. 5. Диаграмма изменения скорости рабочей точки Р при раскрытии и закрытии челюсти ковша
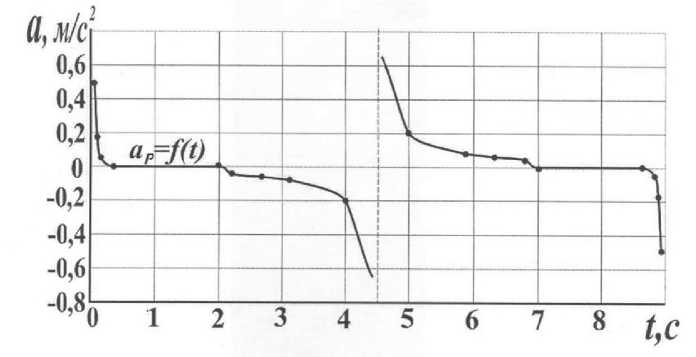
Рис. 6. Диаграмма изменения ускорения рабочей точки Р при раскрытии и закрытии челюсти ковша
ВЫВОД
Таким образом, в результате решения задачи кинематического анализа исследуемой схемы рычажного грейферного механизма установлены следующие факты:
-
- движение челюстей грейферного захвата происходит при неподвижной головке грейфера;
-
- траектория рабочей кромки челюсти включает два участка: участок приближения к технологической поверхности и прямолинейный участок, соответствующий технологической поверхности;
-
- протяженность прямолинейной траектории рабочей кромки составляет порядка 80% от всей ее траектории;
-
- отклонение от прямолинейной траектории кромки, т.е. точность воспроизведения заданной функции перемещения, составляет менее 3%.
Список литературы Кинематический анализ многозвенного рычажного механизма грейфера
- Ципурский И.Л. Экскаватор с рабочим оборудованием драглайна и грейфера : учебное пособие. М.: Московский государственный строительный университет, ЭБС АСВ, 2011. 56 с.
- Компания «Техногрупп». Грейферы и захваты URL: http://www.tehno-group.com/files/ru/katalogs/Katalog-Greferi_zahvati.pdf. Дата обращения 01.03.2017)
- Шишкин А. В. Усовершенствованная конструкция грейферного оборудования для очистки мелиоративных сооружений//Научное обозрение/2010. № 5. С. 13 -23.
- Ковш грейферный гидравлический экскаватора ЭО-3122А/Р.А. Кабашев, Б.И. Журсенбаев, З.Д. Кадержанова, Е.Б. Журсенбаев//Научно-технический сборник «Новости науки Казахстана», 2002. Вып. 3. С. 45-46.
- Журсенбаев Б.И. Предварительный патент «Гидравлический грейфер», Казахстанский институт патентной экспертизы, №13889 от 05.11.2003.
- Иванов К.С., Журсенбаев Б.И., Кадержанова З.Д. Кинетостатика грейферного захвата//Поиск, 2004. Вып. 3. С. 232-239.
- Kim Y.B. et. al. Dynamically optimal trajectories for earmoving excavators//Automation in Construction, 2013. Vol. 35. Pp. 567 -578.
- Cires I., Nanill V.-M. Stability control for huge excavator for surface excavation//Applied Mathematical Modelling, 2016. Vol. 40 (1). Pp. 388 -397.
- Isakov V.S., Maksimov V.P., Maksimov Y.V. Justification of an adaptive working body of a cable excavator//Procedia Engineering, 2015. Vol. 129. Pp. 910 -914.
- Winck R.C., Elton M., Book W.J. A practical interface for coordinated position control of on excavator arm//Automation in Construction, 2015. Vol. 51. P. 46 -58.
