Кинематический синтез кривошипно ползунных механизмов 3-го класса при заданных положениях рабочего органа в момент выстоя и его направляющей

Автор: Хомченко В.Г., Гебель Е.С., Клевакин В.В.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Механика и машиностроение
Статья в выпуске: 4-1 т.13, 2011 года.
Бесплатный доступ
В статье рассматриваются кривошипно ползунные механизмы 3 го класса, реализующие требуемую циклограмму с приближенным выстоем, выходное звено которых перемещается по направляющей, положение которой задано. Разработан метод графического синтеза, позволяющий определить начальные значения свободных параметров. Получены аналитические выражения для расчета параметров кинематической схемы механизма.
Кривошипно-ползунный механизм, кинематический синтез, циклограмма, направляющая
Короткий адрес: https://sciup.org/148200115
IDR: 148200115 | УДК: 621.01-52.+621.865.8
Kinematical synthesis of slider-crank mechanisms of third class with preset driven element in output moment and slider positions
The article considers slider crank mechanisms of third class providing cyclogram with approximate dwell of the output link running along the preset slider. The graphical and kinematical synthesis of the mechanisms are developed for determination of free parameters values and kinematical error of output link when dwelling.
Текст научной статьи Кинематический синтез кривошипно ползунных механизмов 3-го класса при заданных положениях рабочего органа в момент выстоя и его направляющей
янию, откладываемому от точки W пересечения перпендикуляра ОW с направляющей NN .
Осуществим графическое построение кривошипно-ползунного механизма 3-го класса с вы-стоем выходного звена при заданных условиях.
Введем правую систему координат хОу машины-автомата, началом О которой является центр распределительного вала. Проводим под углом a к оси абсцисс Ох прямую, проходящую через начало координат, и откладываем отрезок OW равный dN в абсолютных единицах. Построим нормаль NN к линии OW , и таким образом, зададим положение направляющей выходного ползуна. Для идентификации положений точки С* относительно прямой ОW введем целочисленный параметр i , который принимает значение, равное 1, если поворот на острый угол отрезка OW вокруг точки O к отрезку OС* , будет наблюдаться против часовой стрелки, и равным –1 в противном случае.
От точки W делаем засечку в заданном направлении длиной dС и находим требуемое положе-
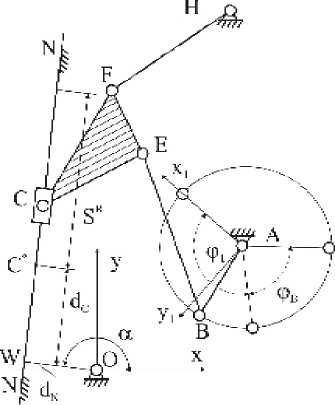
Рис. 1. Схема механизма 3-го класса ние С* рабочего органа цикловой машины-автомата в момент приближенного выстоя (рис. 2).
Построение схемы ползунного механизма 3го класса первоначально ведется в некоторой дополнительной правой системе координат x1Аy1 , начало которой совпадает с центром А вращения кривошипа, а ось абсцисс – с положениями кривошипа АВ0 и шатуна В0Е0 в момент мгновенной остановки выходного звена механизма (рис. 3). Такое расположение системы координат позволяет упростить выражения для проекций шарниров на оси системы координат. Графический синтез механизма на этом этапе ведётся в относительных единицах, что позволит затем масштабировать чертеж, с тем чтобы обеспечить соизмеримость относительных размеров проектируемого механизма с конструктивными размерами цикловой машины-автомата.
Примем длину кривошипа АВ за единицу и отложим ее приемлемым для графических построений отрезком (рис. 3). Вычертим положе-
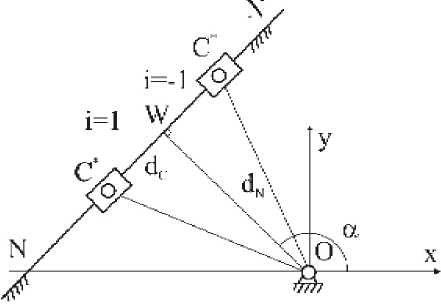
Рис. 2. Последовательность построения положений направляющей ползуна и выходного звена в момент выстоя в абсолютных единицах в системе координат машины-автомата ния AB0, AB1 и AB2 кривошипа AB. Проведем линию VV, совпадающую с биссектрисой угла jВ. Назначив относительную длину b шатуна BE, найдем положения E1 и E0 точки E в начале и в конце выстоя конечной продолжительности и при мгновенной остановке выходного звена в другом крайнем положении. Откладываем угол 02, определяющий положение точки EUU, - предельное положение шарнира E на интервале выстоя, относительно VV. При этом хорда g будет соединять точки E1 и EUU. Проведем серединный перпендикуляр ММ к отрезку ЕUUЕ1, затем из точки E1 заданной относительной длиной е звена CE делаем засечку на прямой ММ, таким образом вычерчиваем положение точки С1 шарнира C в системе координат х1Ау1, который должен для достижения наилучшего равномерного приближения располагаться в одном и том же положении в начале и в конце интервала выстоя и в момент, когда кривошип AB и шатун BE оказываются в интервале выстоя на одной линии.
Совмещая начала координат О и А систем хОу и х1Ау1 , поворачиваем оси последней так, чтобы сначала совпали прямая АС1 с линией ОС* , а затем, масштабируя проектируемую схему механизма (рис. 3), обеспечиваем совпадение точек С1 и С* (рис. 4). Для перехода от относительных единиц, в которых построен механизм, к абсолютным размерам машины-автомата рассчитываем коэффициент масштабирования:
Ц = l c * / l c i , (1) где lC* – расстояние от начала координат О в системе координат хОу до точки С* , соответствующей заданному положению рабочего органа машины-автомата; lC1 – расстояние от опорного шарнира А в системе координат х1Ау1 до точки С1 выходного ползуна в момент приближенного выстоя, находятся по формулам:
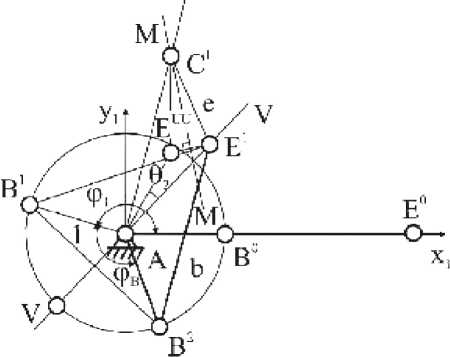
Рис. 3. Последовательность построения ползунного механизма 3-го класса в дополнительной системе координат х1Ау1 в относительных величинах

Рис. 4. Совмещение систем координат хОу машины-автомата и х1Ау1 проектируемого механизма
l c . = V Nl + Cl ; l c 1 = V ( x« н ) 2 + ( у" " ) 2 .
Дальнейшие построения ведутся в абсолютных координатах с учетом скорректированных положений центров шарниров В, Е и С , а также абсолютных значений кинематических параметров а, b и е .
абс абс хЕ 1 уЕ 1
абс абс хЕUU yЕUU абс абс х Е0 уЕ0
абс абс
. хС 1 уС 1
отн х Е 1
отн х ЕUU
отн х Е 0
х
отн
C 1
отн уЕ 1
отн yЕUU отн уЕ 0
отн уС 1
Ц cos ( ^ 0 ) Х[ ц sin ( ф о )
- A sin ( ^ 0 ) Ц cos ( ^ 0 )
где ( Х абс , у . абс ), ( х Отн , у .О™ ) — координаты центров шарниров ползунного механизма 3-го класса с приближенным выстоем выходного звена в аб-
солютных и относительных единицах соответственно; ф 0 - угол между осями абсцисс Ах 1 и Ох , при котором прямые АС1 и ОС* совпадут (рис. 3).
Задаем угол h и длину f стороны CF базового звена ECF и вычерчиваем положения F1 и FUU шарнира F . Для построения звена CE в положении C0E0 , соответствующем началу циклограммы, делаем засечку на линии NN из точки Е0 длиной eабс , равной произведению принятого ранее относительного значения на коэффициент масштабирования (1). Откладывая угол h от отрезка C0E0, вычерчиваем положение E0C0F0 базового звена ECF. Шарнир F является шатунным шарниром промежуточного коромысла FH . По трем положениям F0, F1 и FUU шарнира F звена FH , которые находятся из условий построения граничных положений механизма [1, 3], графически находим центр H его вращения как точку

Рис. 5. Кинематическая схема кривошипноползунного механизма 3-го класса с выстоем выходного звена
пересечения двух серединных перпендикуляров, восстановленных к отрезкам F1FUU и F0F1 .
Данный алгоритм графического построения кривошипно-ползунных механизмов 3-го класса с выстоем выходного звена позволяет синте-
зировать механизм при заданных циклограмме, положениях рабочего органа в момент приближенного выстоя и его направляющей, а также назначить начальные значения свободных кине-
матических параметров.
Разработка аналитического метода синтеза рычажных кривошипно-ползунных механизмов 3-го класса основывается на общих положениях синтеза механизмов с выстоем, представленных в работах [1, 2]. На основе построенной кинематической схемы кривошипно-ползунного механизма 3-го класса с приближенным выстоем выходного звена (рис. 5) получим методом проекций аналитические зависимости для расчета вычисляемых кинематических параметров.
При кинематическом синтезе проектируемого механизма в качестве назначаемых выступают параметры циклограммы: ф 1 , ф в , парамет-
ры направляющей: dN и a , а также положение С* рабочего органа машины-автомата в системе координат хОу , которое задается расстоянием dС . Свободными параметрами синтеза в данной работе приняты: b, е и f – соответственно относительные длины звена ВЕ и сторон СЕ и СF треугольного звена ЕСF ; h – угол между сторонами EС и СF звена ЕСF ; q2 – угол, задающий крайнее положение С1EUUFUU звена СEF относительно положения С1E1F1 этого звена в начале выстоя конечной продолжительности.
Предлагаемый метод кинематического синтеза механизма 3-го класса с выстоем позволяет, с использованием известных тригонометрических методов, получить аналитические зависимости для рассчитываемых параметров механизма: m и с – коэффициента масштабирования и длины коромысла СН соответственно, а также кинематические характеристики схемы: SR – абсолютное перемещение выходного звена механизма за интервал движения; S1 – кинематическую точность позиционирования ползуна на интервале приближенного выстоя.
Уравнение направляющей NN в системе координат хОу с угловым коэффициентом записываем как:
у = - ctg ( a ) х + ( sign ( N N ) • N N )/ sin ( a ) . (3)
Определяем координаты ( x ^'н , у Етн ), ( X euu , у0 Ёии ) и ( Х ео н , у° Ё0н ) положений Е1 , Еии и Е0 точки Е в системе x1Аy1 :
х Ё'н = h cos(6 1 ); x EUU = ( b - a ) cos(6 1 + 6 2 ); уЁт н = h sin( 6 1 ); у ЁЦНи = ( b - а ) sin( 6 1 + 6 2);
x ЕЕ° = a + b;У ЕТН = 0,
где h = [ b 2 - a 2 • sin2 ( °’5 ф в ) ] °’5- a • cos ( °’5 ф B ) ;
01 = ф1 + 0.5фв - п.
Рассчитаем координаты ( x C от 1 н , y C от 1 н ) шарнира С в момент начала выстоя как точку на серединном перпендикуляре ММ к отрезку g , соединяющему точки Е1 и ЕUU :
Имея ввиду, что центр вращения Н промежуточного коромысла НF лежит на пересечении перпендикуляров, восстановленных из середины хорд F0F1 и F1FUU , найдем координаты ( хН, уН ) центра Н в системе координат x1Аy1. Запишем уравнения прямых F0F1 и F1FUU соответственно как:
У = k F ° F 1 " Х + bF ° F 1 ; У = k F 1 FU " Х + bF 1 FU ,
где k F ° F 1 = ( УЕ 1 УЕ ° )/( x F 1
b F ° F 1 У Е ° X F ° " k F ° F 1 ;
Х отн = х Етн - е cos ( e ) ;
У™ н = У ЕТн + e sin ( e )
где
k F 1 FU = ( У Е 1 У Еи )/( X F 1
е = arcsin (( b - a ) sin ( 0 2 ) / g ) - 0 1 + arccos ( °.5 g / e ) ;
g = [(b - a )2 + h2 - 2(b - a)h cos(02)] °’5 •
Совместив системы координат хОу и х1Ау1 , определим угол j0 , на который необходимо повернуть плоскость, связанную с механизмом, так чтобы прямая АС1 совпала с линией ОС* в системе машины-автомата. Запишем уравнения выше упомянутых прямых с учетом выражения (3) следующим образом:
У АС 1 = ( Уп с/ х абхс ) • Х ас 1 ; У ос * = tg (а - в ) •
x OС *;
где в = arctg ( d c /dN ) •
Рассчитаем угол j0 между осями абсцисс Ах1 и Ох :
абс абс абс абс sign(yc 1 /ХС1 tg (а в )) (уС 1 /ХС1 tg (а в))
1 + ( У С 1 с/ х С 1 с ) • tg ( а - в ) ,
Вычислив коэффициент масштабирования m по формуле (1), определяем абсолютные значения длин кривошипа АВ , шатуна ВЕ и стороны ЕС треугольного звена CEF :
аабс = М; ba6e = М" b; еабс = М" е-
Положение С0 выходного ползуна С в системе координат х1Ау1 в момент мгновенного выстоя найдем из системы уравнений, составленной исходя из того, что точка С0 лежит на прямой NN (3) и расстояние между центрами шарниров Е и С равно еабс :
У с ° = - etg ( а - ф ° ) Х с ° + d N / sin ( а - ф ° ) ; абс 2 абс 2 0.5
е абс = LV x C ° Х Е ° / + Vе ° Уе ° / J ’
где x E аб 0 с и y Е аб 0 с вычислим по формуле (2).
Координаты ( хF1, уF1), (хF0, уF0) соответственно точек F1 и F0 шарнира F треугольного звена
CEF , рассчитаем формулам:
X f 1 = х Сбс + f cos e + п+п\ У F 1 = У Сбс + f sin e + п+п\
X f ° = Х с ° + f cos e - п ) ; У е ° = У с а - f sin e - п ) ,
где 8° = arccosf еабс +(+ ba6e )2 ■ С
( 2 е абс ( « абс + ^бс ) )
l c ° = V Х с ° + у с ° •
XF ° ) ;
x FU ) ;
b F 1 FU = У Еи x FU " k F 1 FU ;
Xfu = Х с 1 - (( X c 1 - Xeuu ) cos ( n ) - ( У с 1 - У EUU ) sin ( n )) f ;
e
f
У еи = У С 1 -(( XC 1 - Xeuu ) sin ( n ) + ( У С 1 - У Еии ko^ n ))- ■ e
Тогда координаты ( хН, уН ) центра Н определим как решение системы уравнений:
f УН = - kF° F 1 " ХН + °’5 I УН = - kF 1 FU " ХН + °’5
( kF°F 1 " ( XF ° + XF 1 ) + УЕ ° + УЕ 1 ) ;
1 ( kF 1 FU " ( XF 1 + XFU ) + УЕи + УЕ 1 ) ;
В результате
xH
Ъ • к
H F 0 F 1
. к , F 1 FU
/ ( kF 1 FU
-
kF ° F 1 ^
УH = kF ° F 1 " ХН + °’5 ( kF ° F 1 " ( XF ° + XF 1 ) + УЕ ° + УF 1
где bH = °’5(kF0 F1 "(XF ° + XF1)-kF1 FU "(XF1 + XFUU ) + УЕ ° - УЕи ).
Запишем зависимости для расчета абсолютных длины c про-межуточного коромысла НF , межцентрового расстояния dН (рассто-яние между точками Н и А ) и малого перемещения S1 выходного звена за интервал выстоя:
c = [(Xh - Xf ° )2 + (Ун - Уе ° )2] ’ ; dH =[xH + уН ] °’5;
S1 =[(c + f )2 - dHс] -
-
x
H
- Х Сбс ) 2 + ( У н
-
абс 2 2 0.5 , ус 1 ) ЬНС'
где d HC = |cos ( a ) x H + sin ( а ) y H - d N |.
Абсолютная величина рабочего хода SR вы-
ходного звена механизма определяется следующей зависимостью:
S R = [ ( Х с ° - Х Сбс ) 2 + ( У с ° - у сбс ) 2 ] °5 + °’5 S 1 .
Найдем углы r1 и r2 , устанавливающие соответственно положения эксцентриситета lС и отрезка dН относительно оси Аx1 :
Р 1 = sign ( - У с ) • arccos ( xc /Сс ) ;
р 2 = sign ( ф ° - arccos ( x H jdH )) х х ( ф ° - arccos ( x H / d H )) ,
где l C = ( d NN + d C ) 0.5 .
Определим угол d , фиксирующий коромысло HF относительно вспомогательной системы координат x1Ay1 :
5 = 180 o - sign ( x F0 ) • arccos ( x F 0 / c ).
В настоящей статье разработан метод кинематического синтеза механизмов 3-го класса с возвратно-поступательным движением выходного звена и его выстоем в одном из крайних положений, позволяющий сонаправлено с графическим методом проектировать механизмы по заданным циклограмме, положениях рабочего органа в момент выстоя и его направляющей. Аналитический аппарат синтеза механизмов 3-го класса предопределен алгоритмом их графического построения, что значительно упрощает процесс получения математических моделей и проверку их адекватности.
Список литературы Кинематический синтез кривошипно ползунных механизмов 3-го класса при заданных положениях рабочего органа в момент выстоя и его направляющей
- Хомченко В.Г. Графический и аналитический методы синтеза шестизвенного шарнирного механизма третьего класса с приближенным выстоем выходного звена в крайнем положении по заданной. Омск: ОмПИ, 1991. 7 с. Деп. в ВИНИТИ 11.06.91, № 2460-В91.
- Хомченко В.Г. Проектирование плоских рычажных механизмов цикловых машин автоматов и манипуляторов. Омск: ОмГТУ, 1995. 152 с.
- Соломин В.Ю., Хомченко В.Г. Методы графического и аналитического синтеза кривошипно ползунных механизмов третьего класса с приближенным выстоем выходного звена. Омск: ОмГТУ, 1997. 12 с. Деп. в ВИНИТИ 05.06.97, № 1801-В97.
