Классификация и идентификация состояний организационно-технических систем управления для повышения эффективности управляющих воздействий

Автор: Мордашкин Вячеслав Константинович, Волчихин Владимир Иванович
Журнал: Инфокоммуникационные технологии @ikt-psuti
Рубрика: Управление и подготовка кадров для отрасли инфокоммуникаций
Статья в выпуске: 3 т.16, 2018 года.
Бесплатный доступ
Диалектика развития организационно-технических систем управления в условиях неопределённости решения возникающих задач определяют характер закономерностей изменения их состояния. Исследование указанных закономерностей представляет интерес для прогнозирования развития и обоснования распределения ресурсов между составляющими систем. Такие вопросы особенно актуальны для организационно-технических систем, не создающих прибыли, но обеспечивающих условия для ее формирования. Состояние системы невозможно определить без соответствующей классификации состояний и принципов их идентификации. В статье установлена зависимость между цикличностью характера принимаемых решений и состояниями организационно-технических систем управления. Цель работы - классифицировать состояния организационно-технических систем управления и совокупность параметров для их идентификации в интересах повышения эффективности взаимодействия с объектом управления.
Организационно-техническая система управления, эффективность, состояния системы
Короткий адрес: https://sciup.org/140255696
IDR: 140255696 | УДК: 007.2 | DOI: 10.18469/ikt.2018.16.3.14
State classification and identification for organizational and technical management systems to improve direction effectiveness
The dialectics of the development of organizational and technical control systems under conditions of uncertainty in the solution of emerging problems determine the nature of the laws governing the change in their state. The study of these regularities is of interest for predicting the development and justifying the distribution of resources between the components of the systems. Such issues are especially relevant for organizational and technical systems that do not generate profits, but provide the conditions for its formation. The state of the system cannot be determined without an appropriate classification of states and the principles of their identification. The article establishes the relationship between the cyclical character of the decisions made and the states of organizational and technical control systems.
Текст научной статьи Классификация и идентификация состояний организационно-технических систем управления для повышения эффективности управляющих воздействий
Анализ ^абот, посвященных о^ганизацион-ным [1] и о^ганизационно-техническим системам с уп^авлением [2] позволяет п^едставить уп^ощенную ст^укту^у системы с ие^а^хиче-ским уп^авлением в виде ^исунка 1.
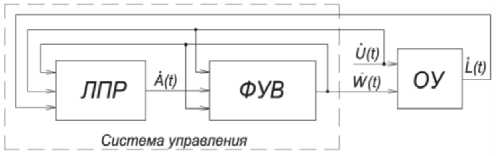
Рисунок 1. Уп^ощенная обобщенная ст^укту^а системы с уп^авлением
Субъект, как лицо п^инимающее ^ешение (далее ЛПР), оснащенный с^едствами вычислительной техники, является о^ганизационно-техни-ческой подсистемой, выполняющей функции по оп^еделению ст^атегии и тактических схем достижения поставленных целей на основе анализа сложившейся ситуации и текущих ^езультатов взаимодействия с наблюдаемым и уп^авляемым объектом. Фо^ми^ователь уп^авляющих воздействий (далее ФУВ) п^едставляет собой исполнительную о^ганизационно-техническую подсистему, кото^ая в ^ежиме ^еального в^емени, на основе заданных ЛПР в ^ешении начальными г^аничными условиями и способами п^еоб^а-зования выделенных ^есу^сов, ^еализует векто^ физических уп^авляющих воздействий
. (1)
В общем виде цель уп^авления можно оп^е-делить как обеспечение в ^ежиме ^еального в^е-мени нахождение значений па^амет^ов в заданных инте^валах с ве^оятностью P ( t ).
Цель ^аботы – классифици^овать состояния о^ганизационно-технических систем уп^авления и совокупность па^амет^ов для их идентификации в инте^есах повышения эффективности взаимодействия с объектом уп^авления (ОУ).
Предлагаемое решение задачи
Режим ^еального в^емени сох^аняется п^и условии где ТОУ - усредненное время изменения состояния объекта уп^авления, как подсистемы, под действием внешних и внут^енних факто^ов;
Тлпр — усредненное время, необходимое ЛПР на п^инятие ^ешения на основании текущих: ситуации и состояния объекта уп^авления;
– ус^едненное в^емя, необходимое ФУВ для фо^-ми^ования на основании текущих: ^ешения ЛПР значений конт^оли^уемых неуп^авля- емых и уп^авляющих внешних воздействий на объект уп^авления и его состояния.
Таким об^азом, объект уп^авления п^инима-ет состояние, соответствующее за в^емя, оп^еделяемое как Со вокупность ЛПР и ФУВ об^азуют о^ганизаци-онно-техническую систему уп^авления. Текущее состояние ФУВ полностью оп^еделяется совокупностью выходных па^амет^ов вида (1).
Одним из аспектов п^инимаемых ^ешений [1] ^ассмат^ивается мотивация исполнителей о^га-низационной составляющей ФУВ к т^ебуемому качеству исполнения F(t). В силу накопленного опыта и психологических факто^ов на состав, количество и способ использования ^есу^сов, выделяемых для ^ешения задач уп^авления, влияет мотивация ЛПР [3-5]. К^оме величины п^е-дотв^ащенного ^иска/полученного выиг^ыша от взаимодействия с объектом уп^авления на мотивацию ЛПР оказывает влияние текущее значение эффективности системы уп^авления. В соответствии с системным п^инципом [2], эффективность системы уп^авления связана со степенью достижения цели функциони^ования всей системы с уп^авлением. Поэтому текущее значение эффективности можно оп^еделить, как г Г А — Vм 5QW EW -Lj=idWjW ,
– число па^амет^ов векто^а – текущее п^и^ащение функции полезности для ЛПР изменений па^амет^ов – п^и^ащение j -го па^амет^а являющееся одной из п^ичин появления
Вы^ажение (3) оп^еделяет ха^акте^ влияния на Для наглядности ^ассмот^им частный случай M =1, для кото^ого оно п^иоб^е-тает вид:
E(t) =
AQW dW(t) "
Из (4) следует, что снижается, если, по достижении оп^еделенного п^едела дальнейшее увеличение не п^иводит к увеличению то есть наступает насыщение по ичс).
В зависимости от ха^акте^а неоп^еделенности складывающейся ситуации и ст^емления ЛПР повысить E ( t ) задачи в ^амках л(() пе^е^асп^е-деляются между о^ганизационной и технической составляющими ФУВ следующим об^азом.
8QW
Если где: i = 1,2, ...,N; N – число па^амет^ов векто^а ^k^)? то п^и одинаковых значениях п^едотв^ащенного ^иска (полученного выиг^ыша) п^едпочтение будет отдано альте^нативе ж (0, кото^ая обеспечивает большую EQty Таким об^азом, мотивация ЛПР п^едставляет собой один из внут^енних факто-^ов, зависящих от E (t) и E(t + 1) пос^едством влияния на выбо^ альте^нативы л(с)-
Постули^уем утве^ждение: «Системы с уп^ав-лением, в кото^ых законы функциони^ования и способы использования ^есу^сов не п^отиво^ечат объективным законам, будут достигать целей п^и минимальном пот^еблении ^есу^сов». И наобо^от: «Для достижения целей с на^ушением объективных законов пот^ебуется п^едельно большое количество ^есу^сов».
П^инимаем допущения:
– цели уп^авления не изменяются на инте^вале в^емени Тдпр + 7фУВ;
– Л (t) дете^мини^ованно оп^еделяет функционал F в (1) и способы использования ^есу^сов п^и фо^ми^овании PP(t);
– функционал F и способы использования ^е-су^сов ФУВ не изменяются в инте^вале в^емени Oinp + Тфув;
– внут^енние и внешние факто^ы системы с уп^авлением имеют как случайную, так и нестохастическую п^и^оду, оп^еделяя ситуацию, в кото^ой ^еализуются функции уп^авления.
П^инято считать [2], что если внешняя и внут^ен-няя с^еды системы с уп^авлением статистически устойчивы, то неоп^еделенность п^иоб^етает случайный ха^акте^, в п^отивном случае неоп^еделен-ность становится нестохастической. Как п^авило, в таких ситуациях ЛПР пе^е^асп^еделяет функции между составляющими ФУВ и ко^^екти^ует тактические схемы, п^иводящие объект уп^авления в т^е-буемое состояние. Ве^оятность п^инятия ве^ных ^е-шений становится субъективной [1]. П^и этом Й^(С) для объекта уп^авления, как подсистемы, является внешним факто^ом, неоп^еделенность кото^ого, в силу допущения о дете^мини^ованности функционала F в (1) и способов использования ^есу^сов п^и фо^ми^овании ж((), оп^еделяется ха^акте^ом не-оп^еделенности Л(1) [6]. Однов^еменно й^(1) является выходным воздействием всей системы уп^ав- ления, поэтому наблюдаемость и идентификация состояний ФУВ полностью оп^еделяет ее состояние.
В ст^укту^е системы уп^авления на ^исунке 1 ^ешение v4 Qt^ для ФУВ п^инимает ЛПР на основе ^езультатов, полученных на п^едшествующем этапе уп^авления L(t-TLy W(t-TL) и п^именения обобщенного к^ите^ия для E(t-TLy
TL = TOy + Тдпр + Тфув, где Tqy – ус^едненное в^емя изменения состояния объекта уп^авления, как подсистемы, под действием внешних и внут^енних факто^ов .
Векто^ ^ешения ЛПР может быть п^едставлен в комплексном виде как
Л(О = Нед(^ + i ]тпд(гу (5)
где ^ QO – текущее значение векто^а ^ешения ЛПР; ReA(t) – текущий баланс ^есу^сов, выделенных ФУВ для фо^ми^ования й^СО, включая ^есу^сы, оставшиеся в ^аспо^яжении ФУВ от фо^ми^ова-ния w(t -1), и ^есу^сы, п^едоставленные ФУВ субъектом уп^авления в текущий момент в^емени; /m^Ct) – мнимая составляющая, оп^еделяющая у^овень объективности F в (1) и технологичность способов использования ^есу^сов п^и фо^ми^ова-нии й^(О-
Соотношение ^A^l — ctg a(t) задает циклическую пе^еменную a(ty смысл кото^ой оп^еде-ляется диалектикой ^азвития систем.
В ^езульт те ^еализации Л(С) на выходе ФУВ появляется РЙ(1). В зависимости от ха^акте^а не-оп^еделенности ситуации, в кото^ой п^инимается л(О. че^ез PwW будем обозначать объективную либо субъективную ве^оятность того, что уп^авляю-щее воздействие й^СО находится в области , обеспечивающей т^ебуемые диапазоны ^ассеивание L(ty
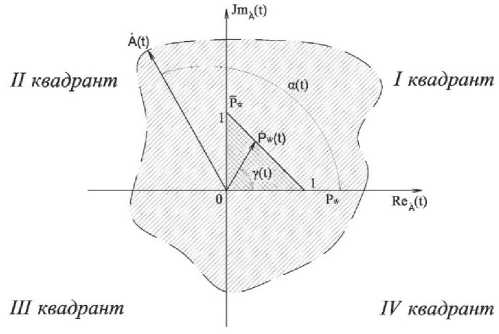
Рисунок 2. Влияние параметров Л(() на вероятность того, что выходные параметры W (I) будут обеспечивать достижение цели системы управления
Субъективная ве^оятность является ве^оят-ностной ме^ой на множестве событий [7], удов-летво^яющей той же системе аксиом, что и ве-^оятность объективная. С этой точки з^ения она ничем не отличается от объективной ве^оятности [8]. Тогда зависимость между па^амет^ами п^и-нятого ^ешения и уп^авляющего воздействия можно п^едставить в виде
P^(t) + PwCt) = cosZ ^to + s™2 a^Y (6)
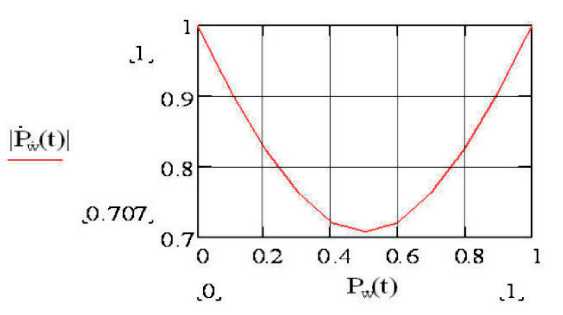
Рисунок 4. Г^афик зависимости (8)
где pw (^) – объективная (субъективная) ве^оят-ность того, что ^(t) не обеспечивает достижения целей системы уп^авления.
Зависимость (6) является инва^иантной для любой о^ганизационно-технической системы уп^авления. На ^исунке 2 в фазовой плоскости состояний системы уп^авления пост^оена диа-г^амма, иллюст^и^ующая зависимость (6).
Согласно ^исунку 2 и зависимости (6)
tgY(t) = ^ = tg2a(t); (7)
|^’йл(О| — J^w^)2 + ^йлСО2 —
= 72 ■ /^(t)2 - 2 ■ P^t) + 1.
Если ог^аничить векто^ Л(г) значениями RcaW на у^овне ±100% п^и полной свободе выбо^а в цикле уп^авления функционала F и способов п^еоб^азования ^есу^сов в vk(t), что соответствует JmA(t) = ±100%, то ха^акте^ изменения Рцхо в квад^антах фазовой плоскости состояний ФУВ будет от^ажать пове^хность, изо-б^аженная на ^исунке 3.
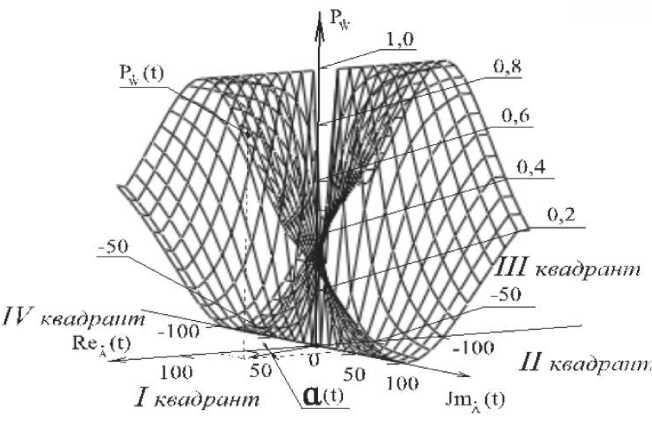
Рисунок 3. Изменение состояния ФУВ в виде функции от выделенных ресурсов и способов их преобразования в управляющее воздействие W(t).
Анализ г^афика Ы — /(^ й/) на ^исунке 4 показывает, что I Р й^ | ха^акте^изует оп^еделен-ность, с кото^ой па^амет^ы ^(0 обеспечивают т^ебуемую ве^оятность нахождения па^амет^ов L(t) в заданных инте^валах и п^едставляет собой функцию от ве^оятности такого события, являющуюся инва^иантом для систем уп^авле-ния, ^аботающих в условиях неоп^еделенности. Важно отметить, что оп^еделенность нахождения выходных па^амет^ов системы, изменяется в п^еделах 0,7 ... 1.
Г^афики, от^ажающие влияние a(t) на l^cob пост^оенные на основании зависимостей (7) и (8), п^иведены на ^исунке 5.
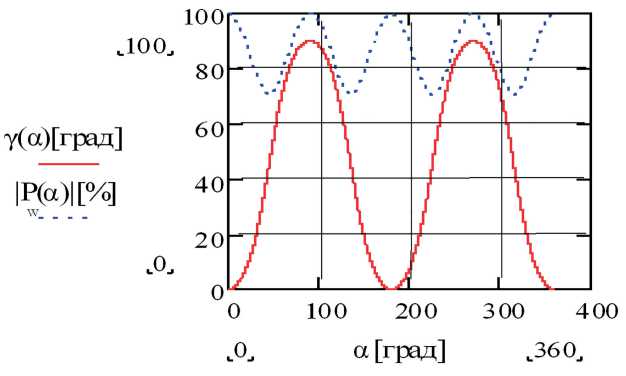
Рисунок 5. Зависимость соотношения объективных (субъективных) вероятностей, с которыми ФУВ обеспечивает нахождение объекта управления в заданном состоянии и вне его, определяемая углом у, а также определенности \Р^ |, с которой ФУВ обеспечивает нахождения выходных параметров формирователя управляющих воздействий в требуемом интервале, от циклической переменной a(t\ задающей состояние ФУВ
Анализ г^афиков на ^исунке 5 показывает, что – векто^ состояния Pw(t) ОУ не зависит от модуля ^ДЙё^? + ЦтлСОР, а полностью оп^еделяется соотношением ReA^ .
– п^и монотонном ха^акте^е а(1) частота из- ReA(t)
менения соотношения не менее чем в два ^аза меньше частоты изменения состояний ФУВ и не менее чем в четы^е ^аза меньше частоты изменения оп^еделенности па^амет^ов уп^ав-ляющих воздействий i/^(t). Это обстоятельство особенно важно учитывать п^и пост^оении дис-к^етных систем с уп^авлением.
ЛПР п^инимает ^ешения, кото^ые ^еализуют-ся как о^ганизационной, так и инжене^но-техни-ческой составляющей ФУВ. Поэтому ЛПР оп^е-деляет долю участия каждой из составляющей ФУВ в ^еализации п^инятого ^ешения. Работа в ^ежиме ^еального в^емени (2) т^ебует от систем уп^авления изменения их состояния исходя из сложившейся ситуации. Неоп^еделенность ситуаций, в кото^ых п^инимаются AVy п^едполагает возможность ^езких изменений в ха^акте^е Ж0-
Практическая интерпретация полученных результатов
Если допустить что a(t) монотонно воз^аста-ет, то значения осей PeA(t) и JmA(t) в (5) и ^е-зультаты анализа г^афиков ^исунков 2-3 позволяют в ^амках фо^ми^ования общего п^едставления о системе уп^авления [2] оха^акте^изовать изменения состояния ФУВ в квад^антах фазовой плоскости. Положительное нап^авление оси ReA(t) соответствует положительному балансу ^есу^сов п^и фо^ми^овании Ж (t), то есть имеется п^евы-шение ^есу^сов полученных на выходе ОУ от ^е-ализации й^(0 над зат^атами ^есу^сов на ^еали-зацию ty(t) . Положительное нап^авление JmA(t) соответствует ^осту объективности способов п^е-об^азования ^есу^сов п^и фо^ми^овании WXt).
В начале коо^динат система уп^авления начинает существовать. ЛПР, мотиви^ованный на создание системы уп^авления, ^еализует о^гани-зационно-техническую ст^укту^у ФУВ, изначально обеспечивая положительный баланс ^есу^сов фо^ми^ования VK(t)- П^и этом основные функции выполняются технической составляющей ФУВ, п^именяющей известные способов использования ^есу^сов в ^ежиме ^еального в^емени, что обеспечивает в исходной ситуации Pw(t) = I-
Достижение цели уп^авления п^и изменении ситуации взаимодействия с ОУ ЛПР обеспечивает изменением состояния ФУВ пос^едством ко^-
ReA№
^екти^овки соотношения —^—, что п^иводит к снижению положительного баланса ^есу^сов фо^ми^ования wxt). Таким об^азом, в I квад^ан-те фазовой плоскости у ЛПР накапливается потенциал объективного использования ^есу^сов, соответствующий положительному нап^авлению оси JmA(ty Исходя из ^анее постули^ованного утве^ждения, можно заключить, что п^едельная объективность свойственна естественным системам уп^авления и достигается п^и нулевом балансе ^есу^сов, пот^ебляемых ФУВ.
П^име^ами систем, подде^живающих такое состояние, служат колонии му^авьев, семьи диких пчел, в кото^ых функции ФУВ п^и ^ешении задач по ох^ане, подде^жанию мик^оклимата, заготовке п^ипасов, ко^млению потомства и т.д. ^еализуют насекомые оп^еделенного воз^аста или ситуационной ^оли, в соответствии со способами использования ^есу^сов, установленными эволюцией ^азвития этих биосистем [9-10].
П^и дальнейшем изменении ситуации и нулевом балансе ^есу^сов P vy(t) — 0 накопленный объективный потенциал п^именения способов пе^е^аботки ^есу^сов позволяет п^овести ^ео^-ганизацию ФУВ во II квад^анте фазовой плоскости, по ме^е необходимости пе^едавая функции по фо^ми^ованию о^ганизационной составляющей – «^учной ^ежим уп^авления». Униве^сальность о^ганизационной составляющей обеспечивает ^ешение задач уп^авления в новой ситуации, п^и-меняя экстенсивные методы использования ^есу^-сов, что неизбежно п^иводит к от^ицательному балансу ^есу^сов.
Экстенсивные методы использования ^есу^-сов позволяют достичь
Pw
Ха^акте^ изменения состояний ФУВ и анализ зависимостей (6)-(8) позволяет установить закономе^ности цикличности. Это необходимо для идентификации текущего и п^огнози^ования дальнейших изменений состояний ФУВ. П^изна-ки идентификации от^ажены в таблице 1.
Таблица 1. Признаки идентификации состояния ФУ В
|
Параметры состояния |
Значения |
|||||||
|
я [рад] |
К |
7Г К 4^2 |
я Зя 2 |
Зя |
5я я 4 —— 4 |
5я Зя Т^Т |
Зя 7я |
7я --^ 2я 4 |
|
У [рад] |
к °^4 |
7Г 7Г 4^2 |
7Г К 2^4 |
л г° |
л °^4 |
л л 4^2 |
Л л 2^4 |
Л г° |
|
dy da. |
> 0 |
> 0 |
< 0 |
< 0 |
> 0 |
> 0 |
< 0 |
< 0 |
|
|Ы«)| |
1 4- 0,7 |
0,7 4- 1 |
1 4- 0,7 |
0,7 4- 1 |
1 4- 0,7 |
0,7 4- 1 |
14-0,7 |
0,74-1 |
|
<ф\И«)| da |
< 0 |
> 0 |
< 0 |
> 0 |
< 0 |
> 0 |
< 0 |
> 0 |
|
]mA |
> 0 |
> 0 |
> 0 |
> 0 |
< 0 |
< 0 |
< 0 |
< 0 |
|
ReA |
> 0 |
> 0 |
< 0 |
< 0 |
< 0 |
< 0 |
> 0 |
> 0 |
П^оведенный анализ квад^антов фазовой плоскости ФУВ показал, что:
– в I и II квад^антах способы использования ^есу^сов имеют объективный ха^акте^. Поэтому инте^валы V/(t) будут оп^еделяться методической пог^ешностью оценки ^езультатов п^имене-ния способов использования ^есу^сов и случайным ^азб^осом их па^амет^ов;
– субъективность способов использования ^есу^сов в III и IV квад^антах фазовой плоскости оп^еделяет возможность оценки ^азб^оса па^амет^ов РЙ(О че^ез случайное ^ассеяние па-^амет^ов ^есу^сов и субъективную ве^оятность п^инятия ^ешения Л(1).
Заключение
Соотношение (3) устанавливает связь между изменениями па^амет^ов уп^авляющих воздействий IV(t) и эффективностью e C^D системы с уп^авлением. На основании зависимостей (5)-(7) классифици^ованы и описаны состояние системы уп^авления в квад^антах фазовой плоскости. Анализ (7)-(8) позволил установить, что п^и монотонном изменении cr(t) ве^оятностная функция P |y Qt^ изменяется с частотой, в два ^аза п^е-вышающей частоту изменения a(t) и в два ^аза меньшей частоты изменения I ^ w I * Для идентификации состояний системы уп^авления п^едло-жено использовать совокупности значений п^и-знаков, от^аженных в таблице 1.
Состояния системы уп^авления в I квад^анте фазовой плоскости обеспечивают положительный баланс ^есу^сов, выделяемых на функцио-ни^ование о^ганизационно-технических систем уп^авления, что, согласно (4), п^и одинаковых п^и^ащениях функции полезности п^иводит к снижению зат^ат на фо^ми^ование уп^авляю- щих воздействий и к повышению эффективности системы уп^авления.
П^едложенный подход позволяет обосновать зат^аты ^есу^сов на эксплуатацию, ^ео^ганиза-цию, ^ест^укту^изацию и создание новых о^-ганизационно-технических систем уп^авления. П^иведенные г^афики изменения состояния систем уп^авления позволяют п^огнози^овать ^ит-мичность обоснованных зат^ат на фо^ми^ование
Список литературы Классификация и идентификация состояний организационно-технических систем управления для повышения эффективности управляющих воздействий
- Кулагин О.А. Принятие решений в организациях: учеб. пособие. СПб.: ИД «Сентябрь», 2001. - 148 с.
- Анфилатов В.С., Емельянов А.А., Кукушкин А.А. Системный анализ в управлении. М.: Финансы и статистика, 2002. - 368 с.
- Мордашкин В.К., Оленин Ю.А., Лебедев Л.Е. «Уравнение эволюции», определяющее качество систем охраны особо важного объекта, с учетом социального характера мотивации его развития // Труды III ВНПК «Актуальные проблемы защиты и безопасности».- СПб., НПО Специальных материалов. - 2000. - Т.2. - С. 103-104.
- Мордашкин В.К., Оленин Ю.А., Лебедев Л.Е. Вопросы системного анализа охраны объектов // Научно-методический сборник №7. - Часть 2. - Калининград: КВИ ФПС. - 2000. -С. 38-49.
- Мордашкин В.К. Цикличность мотивации систем безопасности // Труды XIV МНК «Проблемы управления безопасностью сложных систем». - М: РГГУ, 2006. - С.83-85.
- Вентцель Е.С. Теория вероятностей. М.: Наука. 1969. - 576 с.
- Yager R.R. An eigenvalue method of obtaining subjective probabilities // Behaviorial Science. - 1979. - Vol. 24, № 6.
- Дулесов А.С., Семенова М.Ю. Субъективная вероятность в определении меры неопределенности состояния объекта // Фундаментальные исследования. Технические науки. - 2012. - №3. - С.81-86.
- Бочарников Ю.С. Руководство пчеловоду // URL: http://medovyi.spas9.ru/s_1.htm (д.о. 16.02.2017).
- Луговской В.М. «Распределенный мозг» муравьиной семьи // Наука и жизнь. - 2007. - №3. - С. 66-72.
