Классификация режимов работы фотоприемников в системах локации

Автор: Рогачев В.А.
Журнал: Инфокоммуникационные технологии @ikt-psuti
Рубрика: Технологии телекоммуникаций
Статья в выпуске: 3 т.6, 2008 года.
Бесплатный доступ
На основании предложенной математической модели выходного сигнала фотоприемника определены все возможные режимы работы фотоприемников и произведена их классификация. Для каждого режима определены соответствующие алгоритмы обнаружения и произведено их сравнение.
Короткий адрес: https://sciup.org/140191251
IDR: 140191251 | УДК: 621.383(043)
Working regimes classification for photoreceivers in location systens
All possible working regimes of photo receivers were defined and classified on the ground of the proposed mathematical model of the output signal of photo receiver. The corresponding detection algorithms were determined for every regime. The detection algorithms were compared.
Текст краткого сообщения Классификация режимов работы фотоприемников в системах локации
На основании предложенной математической модели выходного сигнала фотоприемника определены все возможные режимы работы фотоприемников и произведена их классификация. Для каждого режима определены соответствующие алгоритмы обнаружения и произведено их сравнение.
Постановка задачи
Одним из важнейших факторов, определяющих основные характеристики систем локации, является пороговая чувствительность. По типу шумов, ограничивающих пороговую чувствительность, выделяют следующие режимы работы фотоприемника [1-2]:
-
- режим ограничения внутренним (тепловым) шумом;
-
- режим ограничения фоновым шумом (или просто фоном);
-
- также выделяют режим ограничения флуктуациями сигнала («сигнальными шумами»).
Однако определение общего количества возможных режимов работы фотоприемников и установление взаимосвязи между режимами является задачей, изученной лишь для некоторых частных случаев и не имеющей общего решения. Такое положение, в свою очередь, не позволяет определить и синтезировать алгоритмы обнаружения для различных режимов и тем самым оптимизировать построение системы локации.
Решение
Анализ существующих фотоприемников, таких как фотодиоды, фоторезисторы, приборы с зарядовой связью и многие другие, позволяет выделить в выходном сигнале две составляющие – постоянную составляющую и шумовую составляющую.
Постоянная составляющая выходного сигнала фотоприемника имеет две компоненты [1; 35] – темновой ток, то есть ток, присутствующий на выходе фотоприемника при полном отсутствии внешней освещенности, и фоновый ток, то есть ток, обусловленный фоновой (внешней) освещенностью. Более сложная ситуация наблюдается с шумовой составляющей [1-5].
Все возможные ситуации относительно шумов можно разделить на два типа:
-
- шумы, не зависящие от постоянной составляющей, то есть аддитивные шумы (например, тепловые);
-
- шумы, пропорциональные постоянной составляющей, то есть мультипликативные шумы (например, фотонные).
Эти шумы обусловлены различными причинами и различным образом воздействуют на параметры системы обнаружения. Наличие шумов ограничивает потенциальную чувствительность ИК системы.
Для описания распределения выходного сигнала фотоприемника используем модель нормального распределения. Такая модель достаточно хорошо согласуется с распределениями множества выходных сигналов фотоприемников и имеет всего два параметра – математическое ожидание и дисперсию, она хорошо исследована математически. Полагаем, что корреляция шумов в выходном сигнале матричного фотоприемника, как правило, невелика, поэтому она не учитывается в модели.
Учитывая эти положения, модель выходного сигнала фотоприемника представим некоррелированным гауссовским (нормальным) случайным процессом. Математическое ожидание имеет три составляющие – темновой ток, фоновый ток и полезный сигнал, а дисперсия также имеет три составляющие, обусловленные внутренним шумом, фоновым током и полезным сигналом:
y e N(d + b + s,a2 + ab + as),
где y – выходной сигнал фотоприемника при наличии полезного сигнала, d – темновой ток, b – фоновый ток, s – сигнальный ток, σ 2 – дисперсия внутренних шумов, ab – дисперсия фоновых шумов, as – дисперсия сигнальнозависимых шумов, a – коэффициент пропорциональности между постоянной составляющей выходного сигнала и его дисперсией, зависящий от типа применяемого фотоприемника.
При отсутствии полезного сигнала выходной сигнал фотоприемника изменяется, пропадают полезный сигнал и пропорциональные ему сигнальные шумы y e N ( d + b ,^ 2 + ab ) .
Для двухвыборочной модели и проверяемых гипотез о наличии H 1 и отсутствии H 0 полезного сиг-нала,математическая модель имеет следующий вид:
H 0 : x e N ( d + b , a 2 + ab ), y e N ( d + b , a 2 + ab ) ;
H1: x^N(d ^b,^ + ab),y^N(d+b+s,^ +ab+as).
С учетом того, что производится решение задачи обнаружения, на основе полученной математической модели выходного сигнала фотоприем-никапроизведемклассификациюматематических моделей и соответствующих им режимов работы фотоприемников. Для этого используем следующие признаки:
-
а ) параметры распределения вероятностей, относительно которых проверяются гипотезы;
-
б ) условия, при которых из общей математической модели следуют частные случаи.
Математическая модель выходного сигнала фотоприемника во всех случаях описывается нормальным распределением с двумя параметрами – математическим ожиданием и дисперсией. Таким образом, принципиально возможны только три различные ситуации изменения параметров:
-
- одновременное увеличение математического ожидания и дисперсии;
-
- увеличение математического ожидания;
-
- увеличение дисперсии.
В общем случае проверяется гипотеза об одновременном увеличении и математического ожидания s > 0 , и дисперсии as > 0 , а математическое ожидание и дисперсия имеют по три составляющие. Никаких ограничительных условий на соотношение параметров выходного сигнала в этом случае не накладывается. В этих условиях справедлива общая математическая модель:
H 0 : x e N ( d + b , a 2 + ab ), y e N ( d + b , a 2 + ab ) ;
H1: x^N(d+b,rf + ab),y^N(d+b+s,o2 + ab+as).
При проверкегипотезы об увеличении математического ожидания s > 0 , когда влияние фонового тока, а также фоновых и сигнальных шумов мало d >> b , a 2 >> ab + as , получаем модель, описывающую работу фотоприемника в режиме ограничения внутренним шумом [1]
H0 : x e N(d,a2),y e N(d,a2) ;
H 1 : x e N(d,a2),y e N(d + s,a2) .
При проверке гипотезы об увеличении дисперсии as > 0 , когда существенно только влияние сигнальных шумов d + b >> s , a >> 1 , получаем модель, описывающую работу фотоприемника в режиме ограничения «сигнальным шумом» [2]
H 0 : x g N ( d + b , c2 + ab ), y e N ( d + b , c2 + ab ) ;
H1: xeN(d■ b.^ + ab), y eN(d+b,o2 + ab+ as).
При проверке гипотезы об одновременном увеличении и математического ожидания s > 0 , и дисперсии as > 0 , при условии, когда темновой ток и внутренние шумы весьма малы: d << b , c 2<< ab + as , получаем модель, описывающую работу фотоприемника в режиме ограничения фоном [1]
H0 : x g N(b, ab), y g N(b, ab);
H 1 : x g N ( b , ab ), y g N ( d + b + s , ab + as ) .
Данный режим является частным (вырожденным) случаем общего режима при условии, когда параметры выходного сигнала фотоприемника полностью определяются внешним излучением.
Эта классификация разбивает все множество моделей на четыре класса, в зависимости от проверяемых параметров, соотношения компонент помехи и степени связи между дисперсией и математическим ожиданием.
Для рассмотренных режимов работы фотоприемника определим статистики, позволяющие решить соответствующие задачи обнаружения в каждом из режимов.
Для режима ограничения внутренним шумом известна оптимальная решающая статистика Стьюдента, а для режима ограничения сигнальным шумом известна оптимальная решающая статистика Фишера [6-7].
Однако для общего режима и режима ограничения фоном оптимальные решающие статистики определены только для известных параметров [6; 8].
Для решения задачи обнаружения полезного сигнала в режиме ограничения фоном при наличии мешающего параметра – фона определено равномерно наиболее мощное (РНМ) несмещенное правило обнаружения [9]. В этом режиме, в отличие от остальных режимов, существуют только квадратичные статистики [9].
Это правило основано на условном распреде-N лении статистики v = ∑ y 2j при фиксированном j =1 NM значении u = ^ yj2 + ^ xi2 . Оно заключается в j=1 i=1
сравнении статистики – нецентральной статистики Пирсона с пороговым уровнем A v ( и ) , зависящим от значения, которое приняла статистика u [9]:
Hо: v < Av (u) , Hi: v > Av (u).
Таким образом, алгоритм решающей статистики заключается в сравнении суммы квадратов значений сигналов элементов сигнальной области с пороговым уровнем, неявно зависящим от суммы квадратов значений сигналов элементов сигнальной области и фоновой областей.
Необходимость решения неявного уравнения, содержащегодвойнойбесконечный ряд,дляопре-деления порогового уровня в темпе поступления информации резко повышает вычислительные затраты при практической реализации полученного РНМ правила.
Для того чтобы преодолеть это препятствие, было определено более простое приближенное правило, основанное на нецентральной статистике Фишера [9].
Гипотезы H 0 и H 1 принимаются в случае:
NM н0: Z У^ Z Xi2 < Xq j=1 i=1
NM
H i : Z У 22 / Z x 2 > X q , j = 1 i = 1
где X q = (1 - a ) 2/N /[1 - (1 - a ) 2/N ] — пороговый уровень [9].
Таким образом, решающая статистика представляет собой отношение сумм квадратов значений сигналов элементов сигнальной к фоновой области. От известной статистики Фишера, применяемой в режиме ограничения сигнальным шумом, она отличается отсутствием центрирования в числителе и знаменателе.
Задача обнаружения полезного сигнала в общем режиме сходна с двухвыборочной задачей сравнения математических ожиданий при неравных дисперсиях, задачей, не имеющей решения (проблема Беренса-Фишера) [7; 10].
В рассматриваемом случае задача обнаружения полезного сигнала в общем режиме не имеет единственного решения вследствие связи между дисперсией и математическим ожиданием (отсутствия полноты статистик), а из-за того, что проверяется два параметра (многомерная альтернатива), задача не имеет РНМ критерия [7; 10].
Системы данного класса имеют весьма важное значение, поскольку на практике, как правило, в системе присутствует несколько различных типов шумов. Решение задачи обнаружения для таких условий получено только при известных параметрах фона и сигнала [6]. Естественно, это не отвечает реальным условиям обнаружения, когда существует априорная неопределенность как сигнала, так и фона [11].
Синтез правила обнаружения с использованием инвариантных преобразований из группы сдвигов и масштабов приводит к решающему правилу – модифицированной статистике Фишера [12]:
NM
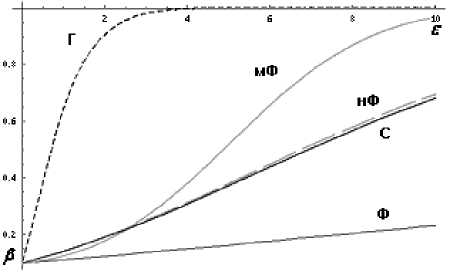
H0 :[Z NM H :[Z(Уj -x)2 /N]/[Z(Xi -X)/(M-1)]< Xz, j=1 i=1 M где x = ∑ xi / M – среднее значение по фоновой i =1 области; Xz = FNXM-1{1 - a} - пороговый уровень; FNXM-1{1 — a} - квантиль распределения Фишера уровня α с N и M - 1 степенями свободы [12]. Данная решающая статистика представляет собой отношение оценки дисперсии по сигнальной области к оценке дисперсии по фоновой области. В отличие от обычной статистики Фишера, в числителе используется оценка математического ожидания фоновой области, в которой отсутствует полезный сигнал. Это позволяет учесть то, что при появлении полезного сигнала произойдет как увеличение математического ожидания, так и дисперсии. Применение теории инвариантности – преобразований из класса сдвигов и масштабов дает возможность получить статистику для проверки выдвинутой гипотезы, однако судить о степени ее близости к РНМ можно лишь в сравнении с решающими статистиками для сходных задач. Рассмотрим применение алгоритмов обнаружения для всех четырех режимов в условиях общей модели. Это позволит сравнить алгоритмы в одинаковых условиях. К тому же, меняя параметры модели, можно будет оценить устойчивость того или иного алгоритма к изменению параметров исходной модели. Приведем зависимости вероятности правильного обнаружения сигнала от отношения сигнал/ шум в диапазоне ε = 0...10 для всех статистик при различных значениях параметров. Вычисления вероятностей правильного обнаружения были произведены при изменении относительного уровня фона τ в диапазоне от 0,1 до 10 и изменении нормированного коэффициента пропорциональности между средним и дисперсией θ в диапазоне от 0,1 до 10 для вероятности ложной тревоги 0,1 и при числе элементов фоновой области M = 10 и числе элементов сигнальной области N = 10. Расчеты также показывают что при изменении вероятности ложной тревоги до 0,01 и 0,001, а также увеличении объемов фоновой и сигнальной областей до 100 характер поведения кривых вероятности правильного обнаружения не изменяется. Рис. 1. Вероятности правильного обнаружения β в зависимости от отношения сигнал / шум ε : Ф – статистика Фишера; мФ – модифицированная статистика Фишера; нФ (длинный пунктир) – нецентральная статистика Фишера; С – статистика Стьюдента; Г (короткий пунктир) – статистика Гаусса при всех известных параметрах; при τ = 1 и θ = 1 Рис. 2. Вероятности правильного обнаружения β в зависимости от отношения сигнал/ шум ε : Ф – статистика Фишера; мФ – модифицированная статистика Фишера; нФ (длинный пунктир) – нецентральная статистика Фишера; С – статистика Стьюдента; Г (короткий пунктир) – статистика Гаусса при всех известных параметрах; при τ = 20 и θ = 1 Как видно из приведенных графиков, при малом уровне шумовой составляющей сигнала статистика Стьюдента и модифицированная статистика Фишера обеспечивают превосходство по сравнению со статистикой Фишера. Расчеты показывают, что превосходство одной статистики над другой зависит от отношения сигнал/шум. При малых отношениях сигнал/ шум, большом уровне фона и малом уровне шу- мовой составляющей сигнала статистика Стьюдента обеспечивает превосходство над всеми остальными. Однако уже при значении отношения сигнал/шум более двух модифицированная статистика Фишера начинает превосходить статистику Стьюдента по мощности. Это объясняется тем, что статистики Фишера хорошо реагируют на шумовую компоненту сигнала, а в данном случае она невелика. Кроме того, большой уровень фона подавляет сигнал. Поэтому статистики, пригодные во всех остальных случаях, при большом уровне фона и малом уровне шумовой составляющей сигнала оказываются малоэффективными. При малом уровне фона и большом уровне шумовой составляющей сигнала, напротив, нецентральная статистика Фишера намного превосходит все остальные и практически приближается к идеальной кривой Гаусса со всеми известными параметрами, а мощность статистики Стьюдента опускается практически до нуля. Интерес представляет рассмотрение вариантов с одинаково малыми или большими уровнями фона и шумовой компоненты сигнала. При одинаково малых фоновой и шумовой компонентах сигнала все статистики обладают достаточно высокой мощностью. При одинаково больших значениях фоновой и шумовой составляющих сигнала модифицированная статистика Фишера и центрированная статистика Фишера обеспечивают стабильное превосходство над остальными статистиками при всех значениях отношения сигнал/шум. Таким образом, вычисления вероятностей правильного обнаружения всех четырех статистик показывают: Для различных отношений сигнал-шум, фона и коэффициента пропорциональности – модифицированная статистика Фишера и центрированная статистика Фишера обеспечивают превышение вероятности правильного обнаружения в 1,5-2,5 раза, при отношении сигнал-шум, равном 2, над статистиками Стьюдента и Фишера. Лучшие характеристики по сравнению с остальными статистиками при небольших относительных значениях фона обеспечивает нецентральная статистика Фишера, а при больших относительных значениях фона – модифицированная статистика Фишера. Выводы 1. Для описания выходного сигнала фотоприемника предложена математическая модель, позволяющая обобщить известные модели вы- 2. Предложена классификация моделей выходного сигнала и соответствующих им режимов работы фотоприемника, разбивающая все множество моделей на четыре класса в зависимости от проверяемых параметров, соотношения компонент помехи и позволяющая учесть степень связи между дисперсией и математическим ожиданием. 3. Для каждого режима определены соответствующие алгоритмы обнаружения и произведено их сравнение.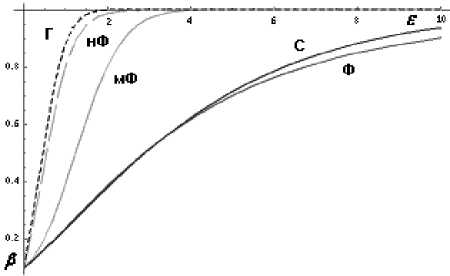
Список литературы Классификация режимов работы фотоприемников в системах локации
- Хадсон Р. Инфракрасные системы. М.: Мир, 1972.-535 с.
- Фотоприемники видимого и ИК диапазонов. М.: Радио и связь, 1985. -328 с.
- Ллойд Дж. Системы тепловидения. М.: Мир, 1978.-414 с.
- Полупроводниковые формирователи сигналов изображения. Под ред. П. Йесперса, Ф. Ван де Виле и М. Уайта. М.: Мир, М., 1979. -574 с.
- Полупроводниковые фотоприемники: ультрафиолетовый, видимый и ближний ИК диапазоны спектров. Под. ред. В.И. Стафеева. М.: Радио и связь, 1984. -216 с.
- Кендалл М., Стьюарт А. Статистические выводы и связи. Мир, М., 1966. -400 с.
- Леман Э.Л. Проверка статистических гипотез. Наука, М., 1978.-408 с.
- Богданович В.А. Применение принципа несмещенности в задачах обнаружения с априорной неопределенностью//Известия ВУЗов СССР. Радиоэлектроника. Т. 15, № 4, 1972. -С. 453-460.
- Рогачев В.А. Выделение сигналов в ТВ системе на матричном фотоприемнике с чувствительностью, лимитированной флуктуациями фона//Техника средств связи. Сер. «Техника телевидения». Вып. 4, 1989. -С. 83-89.
- Кокс Д., Хинкли Д. Теоретическая статистика. М.:Мир, 1978.-560с.
- Анцев Г.В., Волков В.Ю., Макаренко А.А., Рогачев В.А., Турнецкий Л.С. Цифровые методы обнаружения объектов на тепловых изображениях поверхности моря,//Труды РНТО
- им. А.С. Попова. Серия «Цифровая обработка сигналов и ее применение». Вып. VIII, № 1-2, 2006. -С. 294-298.
- Рогачев В.А. Влияние неравномерности чувствительности фотоприемника на выделение сигналов в ТВ системах при внутренних и фоновых шумах//Техника средств связи. Серия «Техника телевидения». Вып. 5, 1990. -С. 31-40.
