Колесо Мекана как платформа для удаленного исследования

Автор: Аманжол М.К., Жарлыкасов Б.Ж., Атанов С.К., Абатов Н.Т.
Журнал: Теория и практика современной науки @modern-j
Рубрика: Математика, информатика и инженерия
Статья в выпуске: 5 (59), 2020 года.
Бесплатный доступ
В данной статье рассмотрено колесо Мекана, принцип их действия, а также преимущества и недостатки перед обычным колесом.
Колесо мекана
Короткий адрес: https://sciup.org/140275491
IDR: 140275491 | УДК: 681.5
Mekan wheel as a platform for remote research
This article discusses the Mekan wheel, the principle of their operation, as well as advantages and disadvantages over a conventional wheel.
Текст научной статьи Колесо Мекана как платформа для удаленного исследования
Всенаправленные колеса уже много лет используются в робототехнике, в промышленности и в логистике. Изучая и систематически анализируя существующую литературу, касающуюся этого типа колес, было выявлено, что системы на основе колес Мекана обладают всенаправленными возможностями, в то время как системы, основанные на обычных колесах, - нет.
В частности, эти возможности делают робот чрезвычайно маневренным, что может быть очень полезно при различных внутренних и наружных применениях. Следовательно, по сравнению с обычными транспортными средствами, всенаправленные роботизированные транспортные средства обладают множеством преимуществ с точки зрения их мобильности в узких пространствах и многолюдных условиях. Они имеют возможность легко выполнять определенные задачи в помещениях с различными препятствиями или в узких местах. Обычно такие помещения встречаются на заводах, складах и т.д. Отсюда вытекает необходимость создания такого рода роботизированных платформ для удовлетворения потребностей различных областей, таких как: промышленная, военная, военно-морская. Кроме того, чтобы предотвратить недостатки, имеющиеся в колесах Мекана, исследователи сосредоточились на его оптимизации, разрабатывая новые конструктивные решения, позволяя тем самым внедрять их в новые отрасли, такие как исследование природы, добыча полезных ископаемых.
Колесо Мекана было изобретено и разработано в Швеции в 1975 году Бенгтом Илоном, инженером шведской компании «Mecanum AB» [1]. Колесо Мекана основано на принципе центрального колеса с рядом роликов, размещенных под углом вокруг периферии колеса. Угол между осью роликов и центральной осью колеса может иметь любое значение, но в случае обычного колеса Мекана он составляет 45 ° (рис. 1). Ролики имеют такую форму, что силуэт всенаправленного колеса является круглым. Наклонные периферийные ролики преобразуют часть силы в направлении вращения колеса в силу, перпендикулярную направлению колеса. В зависимости от направления и скорости каждого отдельного колеса результирующая комбинация всех этих сил создает вектор полной силы в любом желаемом направлении, что позволяет платформе свободно перемещаться в направлении результирующего вектора силы без изменения направления вращения колеса. Шведское всенаправленное колесо имеет 3 степени свободы, состоящей из вращения колеса, вращения ролика и проскальзывания вокруг вертикальной оси, проходящей через точку контакта (рис. 2). В всенаправленном колесе скорость колеса может быть разделена на составляющие в активном направлении и в пассивном направлении. Активный компонент направлен вдоль оси ролика, соприкасающейся с землей, а пассивный перпендикулярно оси ролика [2]. Когда колесо вращается, создается вектор силы вдоль колеса и вектор силы, перпендикулярный колесу. Простое управление каждым вращением колеса позволяет мгновенно изменить направление движения автомобиля.
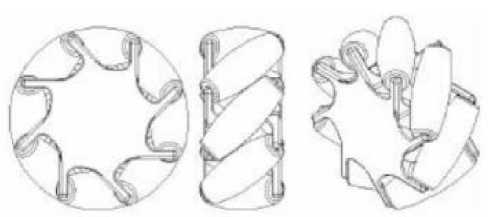
Рисунок 1: Колесо Мекана
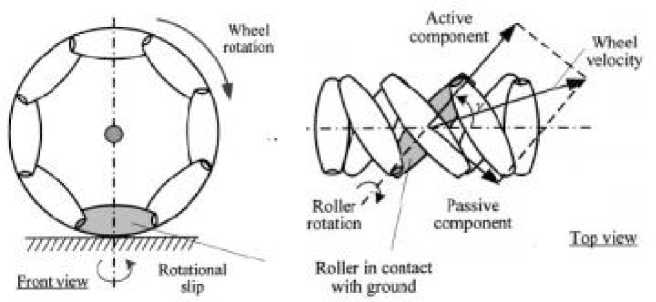
Рисунок 2: Степени свобод [2]
Когда колесо Мекана вращается, по крайней мере, один ролик (максимум два ролика) находится в контакте с землей. Только небольшая поверхность (теоретическая, одна точка) катка находится в контакте с землей. Площадь этой поверхности пересекает ролик с одной стороны на другую, в зависимости от направления вращения колеса. Направление тягового усилия будет определяться движением поверхности контакта. Это означает, что, если мы посмотрим на колесо с верхней стороны, сила тяги будет перпендикулярна оси ролика [3].
Пользовательский интерфейс может быть разработан как мобильное приложение, использующее протокол MQTT [5, 6], или как сайт, использующий API сайта для получения данных [7].
Эта технология также может быть использована для организации сложных систем безопасности [4], что позволит осуществлять мониторинг объекта при его перемещении.
В этой статье, рассмотрены различные концепции колес Мекана, а также их преимущество перед обычными колесами. Основное преимущество этого вида колес представлено всенаправленным свойством, которое оно обеспечивает, предоставляя чрезвычайную маневренность и мобильность в тесных помещениях. Роботы с данными колесами могут быть использованы для достижения различных целей, таких как: поиск и спасательные миссии, военные действия, разведка и добыча полезных ископаемых, транспортировка больших грузов. А также могут быть применены и внутри помещений, например, перевозка грузов, роботизированные инвалидные коляски с электроприводом или тележки.
Список литературы Колесо Мекана как платформа для удаленного исследования
- Ilon, B.E., ‘Wheels for a course stable self-propelling vehicle movable in any desired direction on the ground or some other base", US Patent and Trademarks office, Patent 3.876.255, 1975.
- Song, J.B., Byun, K.S., "Design and Control of a Four-Wheeled Omnidirectional Mobile Robot with Steerable Omnidirectional Wheels", Journal of Robotic Systems, 21(4), 2004, pp. 193-208.
- Doroftei, I., Stirbu, B., "Design, Modeling and Control of an Omni-directional Mobile Robot", Solid State Phenomena Vols. 166-167, 2010, pp 173-178.
- Umarova T., Zharlykasov B. Z., Abatov N. T. THE MODEL OF ACCESS CONTROL SYSTEM IN THE ENTERPRISE BASED ON ARDUINO //Экономика и социум. - 2017. - №. 12. - С. 1925-1928.
- Жарлыкасова А. Н., Жарлыкасов Б. Ж., Муслимова А. З. Модель удаленного управления с использованием протокола MQTT //Наука. Информатизация. Технологии. Образование. - 2018. - С. 485-491.
- Кошевой С. Р., Жарлыкасов Б. Ж., Абатов Н. Т. API КАК СПОСОБ ОБСЛУЖИВАНИЯ КЛИЕНТОВ //Главные характеристики современного этапа развития мировой науки. - 2018. - С. 76-80.
- Жарлыкасова А. Н., Муслимова А. З. СРАВНИТЕЛЬНЫЙ АНАЛИЗ ПРОТОКОЛОВ ПЕРЕДАЧИ ДАННЫХ И ПРЕИМУЩЕСТВА ПРОТОКОЛА MQTT //www. issledo. ru Редакционная коллегия. - С. 75.
