Командно-программное управление полетом Российского сегмента МКС

Автор: Брега Анатолий Николаевич, Коваленко Андрей Александрович
Журнал: Космическая техника и технологии @ktt-energia
Рубрика: Системный анализ, управление и обработка информации
Статья в выпуске: 2 (13), 2016 года.
Бесплатный доступ
В процессе реализации программы полета космического аппарата (КА) требуется передавать управляющие воздействия его бортовым системам с Земли. Традиционно выдача управляющих воздействий осуществляется из трех источников: Центр управления полетами, бортовой комплекс управления, экипаж (для пилотируемых КА). Данная статья посвящена решению задач командно-программного управления полетом Российского сегмента Международной космической станции со стороны наземного комплекса управления. Командно-программное управление КА - это реализация запланированных операций КА с использованием командной радиолинии и бортового комплекса управления КА. Под операциями в данном случае можно понимать совокупность управляющих воздействий на КА, «объединенных единым замыслом и направленных на достижение заданной цели». Для того чтобы реализовать полетную операцию, необходимо решить ряд задач командно-программного управления. В данной статье мы уделим основное внимание следующим задачам: формирование массивов командно-программной информации для реализации полетных операций, верификация командно-программной информации на математической модели бортового комплекса управления.
Управление полетом, командно-программная информация, бортовой комплекс управления
Короткий адрес: https://sciup.org/14343522
IDR: 14343522 | УДК: 004.42+629.786.2
Command and program control of the mission of the International Space Station Russian segment
In the course of carrying out a mission of a spacecraft (SC), its onboard systems need to be commanded from the ground. Traditionally, commands are sent from three sources: Mission control center, the onboard control system, the crew (for manned SC). This paper addresses the problems of command-and-program control of the mission of the Russian Segment of the International Space Station from the ground control system. The command and program control of a SC involves implementation of planned SC operations using command RF link and the SC onboard control system. Meant by operations in this case can be the combination of SC control actions «integrated through an overarching design and aimed at achieving a specific goal». In order to carry out a flight operation, a number of problems in command and program controlling need to be solved. This paper will mostly focus on the following problems: generating command and program data arrays for carrying out flight operations, verifying command and program data using a math model of the onboard control system.
Текст научной статьи Командно-программное управление полетом Российского сегмента МКС
БРЕГА А.Н.

КОВАЛЕНКО А.А.
Командно-программное управление (КПУ) космическим аппаратом (КА) — это реализация запланированных операций КА наземным комплексом управления (НКУ) с использованием командной радиолинии и бортового комплекса управления (БКУ) КА. Под операциями в данном случае понимается совокупность управляющих воздействий на КА, «объединенных единым замыслом и направленных на достижение заданной цели». КПУ Российского сегмента Международной космической станции (РС МКС) осуществляется с использованием методов управления, разработанных в период создания и летноконструкторских испытаний орбитальной станции «Мир» и орбитального корабля «Буран». Однако, особенности построения НКУ (обмен командно-программной информацией (КПИ) между Центром управления полетами (ЦУП) и БКУ по широкополосным каналам связи в составе единого цифрового потока [1, 2]) в сочетании с принципиально новым БКУ РС МКС (единая бортовая вычислительная система сетевого типа, являющаяся ядром системы управления бортовой аппаратурой [3]) привели к значительному росту объема КПИ, необходимой для обеспечения управления полетом. В результате возникла потребность обеспечить решение задач формирования увеличенных объемов КПИ без увеличения численности персонала управления и без снижения качества управления, достигнутого в ходе полета станции «Мир».
Традиционно КПУ КА сводилось к планированию выдачи отдельных функциональных и числовых команд в БКУ. Выдача таких команд в составе массивов КПИ осуществлялась исключительно в зоне видимости отдельных командно-измерительных пунктов (КИП) НКУ. Отложенное по времени управление, в частности, вне зон радиовидимости КА, было возможно только при наличии жестко запрограммированных на борту КА циклограмм. Вмешательство в процесс исполнения таких циклограмм было крайне ограничено, а их изменение во время полета КА невозможно.
Таким образом, КПУ сводилось к планированию выдачи команд в виде расставления на временной оси индексов (шифров) команд в программе сеансов управления (сеансов связи). Ситуация в корне изменилась, когда в составе БКУ появились управляющие компьютеры (бортовые цифровые вычислительные комплексы — БЦВК), например, система управления движением (СУД) транспортного корабля «Союз-Т» с БЦВК «Аргон-16», СУД базового блока орбитальной станции «Мир» с БЦВК «Аргон-16», позднее «Салют-5Б». Применение БЦВК в составе БКУ обеспечило возможность вводить по командной радиолинии циклограммы программно-временного управления (ПВУ) из НКУ в БКУ в виде массивов цифровой управляющей информации (МЦИ). Персонал Главной оперативной группы управления (ГОГУ) получил возможность разрабатывать циклограммы ПВУ для реализации различных программ управления бортовыми системами (в первую очередь это относится к СУД станции «Мир»). Использование в составе циклограмм ПВУ директив ожидания (временное и логическое условия), записи в оперативное запоминающее устройство (ОЗУ) управляющего компьютера массивов и отдельных битов, полей битов дало очень широкие возможности по разработке и исполнению алгоритмов реализации полетных операций любой сложности, причем с привязкой или без привязки к зонам радиовидимости КИП. Оперативная разработка бортовых программ полета (БПП) в виде набора параллельно исполняющихся циклограмм с ветвлениями (в виде логических условий, условных и безусловных переходов, циклов) силами персонала дежурной смены ГОГУ потребовала коренного изменения программного обеспечения (ПО) командного информационно-вычислительного комплекса (КИВК) ЦУП. Эти изменения касались, в первую очередь, создания формализованных языков описания текстов циклограмм ПВУ с символьными идентификаторами директив управления. Синтаксис таких языков был максимально приближен к принятой в ГОГУ терминологии и аббревиатурам, применяемым в детальных планах полета орбитальной станции. Кроме того, использование циклограмм с ветвлениями (рис. 1) потребовало разработки средств отладки программ с помощью моделей БКУ [1].
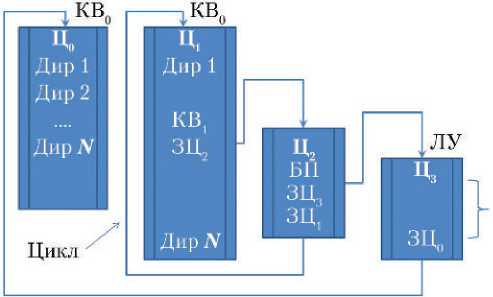
Рис. 1. Циклограммы с ветвлениями: КВ — календарное время; ЛУ — логическое условие; БП — безусловный переход; Ц0…Ц3 — циклограммы № 0…3; ЗЦ — запуск циклограммы
Примечание. Тело циклограммы может содержать директивы ветвления. Директива ветвления (условная инструкция, условный оператор) — оператор, конструкция языка описания программы полета, обеспечивающая выполнение определенной команды (набора команд) только при условии истинности некоторого логического выражения, либо выполнение одной из нескольких команд (наборов команд) в зависимости от значения некоторого выражения или телеметрического параметра.
Формирование МЦИ для БКУ РС МКС также основано на использовании искусственных формальных языков описания планируемых управляющих воздействий, функций и режимов функционирования бортовых систем. Однако, общее количество таких языков значительно больше, чем было разработано для станции «Мир». Это объясняется тем, что РС МКС имеет в составе своего БКУ большее число управляющих компьютеров. В соответствии с распределением управляющей информации по исполняющим компьютерам бортовой вычислительной системы (БВС) и уровнями управления (рис. 2) языки описания управляющих воздействий делятся на виды, приведенные в табл. 1.
Уровни управления, показанные на рис. 2, соответствуют уровням программного управления сетевой БВС. Разработчики программного обеспечения БВС РС МКС создали соответствующие программные комплексы управления, разместив их во всех управляющих компьютерах БВС, и обеспечили интерфейс к ним для персонала управления посредством ввода МЦИ, содержащих программы и данные для них в числовой форме [3].
Таблица 1
Виды бортовых программ РС МКС
|
Бортовая программа |
Исполняющий компьютер |
|
Бортовая программа полета |
ЦВМ |
|
Суточная программа полета |
ЦВМ, ТВУ МИМ1, ТВУ МИМ2 |
|
Расписание сеансов связи |
ЦВМ |
|
Программно-временное управление |
ЦВМ, ТВМ СМ |
Примечание. ЦВМ — центральная вычислительная машина; ТВУ — терминальное вычислительное устройство; ТВМ СМ — терминальная вычислительная машина служебного модуля; МИМ1, МИМ2 — модули.
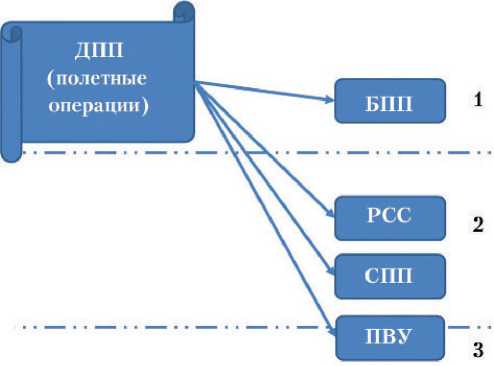
Рис. 2. Уровни управления бортовой вычислительной системы Российского сегмента МКС: 1 — верхний уровень;
2 — функциональный уровень; 3 — приборный уровень Примечание. ДПП — детальный план полета; БПП — бортовая программа полета верхнего уровня; РСС — расписание сеансов связи; СПП — суточная программа полета; ПВУ — программно-временное управление.
Верхний уровень — это реализация целевой операции в виде последовательности режимов КА посредством исполнения предопределенных бортовых программ управления и актуальных уставочных данных. На функциональном уровне происходят адаптация и расширение БПП верхнего уровня для учета текущих операционных условий, реализация основных рутинных операций с целевыми нагрузками; на приборном уровне — адаптация и расширение функций бортовой системы, тонкая настройка отдельных приборов для учета текущих условий эксплуатации, реализация нетиповых режимов и функций систем.
Применение развитых средств формирования МЦИ, обеспечивающих управление РС МКС в целом и его отдельными бортовыми системами как в реальном времени, так и в отложенном (по временным и логическим условиям), предоставило возможность разрабатывать и реализовывать на борту РС МКС полетные операции любого уровня сложности, включающие комплексные режимы бортовых систем.
Разнообразные средства управления БКУ РС МКС потребовали ввода в память БВС большого количества различных числовых данных, задаваемых в виде уставок, что, в свою очередь, привело к значительному росту объема КПИ, вводимого в БКУ по командной радиолинии, по сравнению с орбитальной станцией предшествующего поколения — «Мир» (рис. 3). Диаграмма построена по данным, полученным группой автоматизированного планирования ГОГУ орбитальной станции «Мир» [1] и группой командно-программного управления ГОГУ РС МКС, которые в разные годы возглавляли авторы статьи.
К уставкам относятся как числовые данные, записываемые непосредственно в переменные бортового ПО, так и значения параметров, передаваемых в составе параметрических управляющих воздействий. Ввод числовых параметров непосредственно в процессе создания и редактирования исходных текстов бортовых программ управления показал неэффективность такого подхода, так как он не обеспечивает повторное использование фрагментов кода программ, содержащих числовые значения. Непосредственный ввод данных в текст программы делает ее неудобочитаемой, провоцирует операторские ошибки. Для решения этих проблем в состав переменных исходных данных для формирования КПИ были введены программные объекты с промежуточным кодом, обеспечивающие возможность гибкого кодирования любых числовых данных. Такие программные объекты получили название именованных массивов параметров (ИМП). Каждый ИМП имеет уникальный идентификатор и содержит один или несколько блоков данных. Блоки данных состоят из, как минимум, одной локальной или внешней переменной с указанием источника данных. В качестве источников данных могут выступать либо информация из баллистической формы, либо непосредственно вводимые значения переменных. К внешним переменным относятся переменные, прототипами которых являются объекты из базы данных БКУ [2]. Таким образом, ИМП являются средством формирования стандартных запросов пользователя к базам данных КИВК и БКУ, осуществляющих виртуальное объединение таблиц в БД БКУ и КИВК, а также выборку данных в соответствии с заданными критериями.
Именованные массивы параметров применяются при формировании КПИ всех уровней управления в качестве стандартного средства формирования и контроля допустимости значений числовых уставок и параметров управляющих воздействий. Пример содержания ИМП с параметрами вектора состояния объекта приведен в табл. 2, а на рис. 4 приведен пример ИМП с уставочными данными для режима верхнего уровня «Коррекция орбиты». Оба примера иллюстрируют обращения к БД БКУ, баллистическим формам и прямой ввод числовых значений параметров. Числовые параметры могут кодироваться в машинное представление в соответствии с типами данных, обусловленными организацией памяти бортовых компьютеров. К таким типам относятся символьные или текстовые char, целые (знаковые и беззнаковые) integer, длинные целые (знаковые и беззнаковые) long, вещественные числа с плавающей точкой float, вещественные числа с плавающей точкой двойной точности double и др.
Совместное использование БД БКУ и ИМП для формирования КПИ обеспечили следующие операционные преимущества:
-
• эффективное формирование МЦИ с контролем количества, типов числовых значений, подстановкой инженерных названий и текстовых тарировок независимо от версии ПО БВС;
-
• создание и редактирование ИМП доступно оператору дежурной смены;
-
• обеспечивается переход к летной эксплуатации новых версий ПО БВС без перепрограммирования КИВК ЦУП. Подготовка КИВК может ограничиваться перезагрузкой базы данных БКУ.
Разработка БПП и команд верхнего уровня управления (КВУ) осуществляется на основе типовых описаний структур команд и прототипов уставочных данных. Эти описания и прототипы заданы разработчиками ПО БВС и являются постоянными исходными данными для решения задач формирования КПИ. Особый интерес представляют команды загрузки уставочных данных для реализации режимов МКС или РС МКС. Эти команды могут быть привязаны как к расписанию БПП, так и к отдельным командам, задающим перевод МКС в соответствующий режим в реальном масштабе времени. Исходный текст БПП на формальном языке описания БПП представляет собой набор фраз, каждая из которых содержит следующую информацию:
-
• признак расписания (переход в режим по расписанию или в реальном времени);
-
• календарное время (идентификатор баллистических условий) — для перехода по расписанию;
-
• идентификатор режима и идентификатор ИМП для задания уставочных данных.
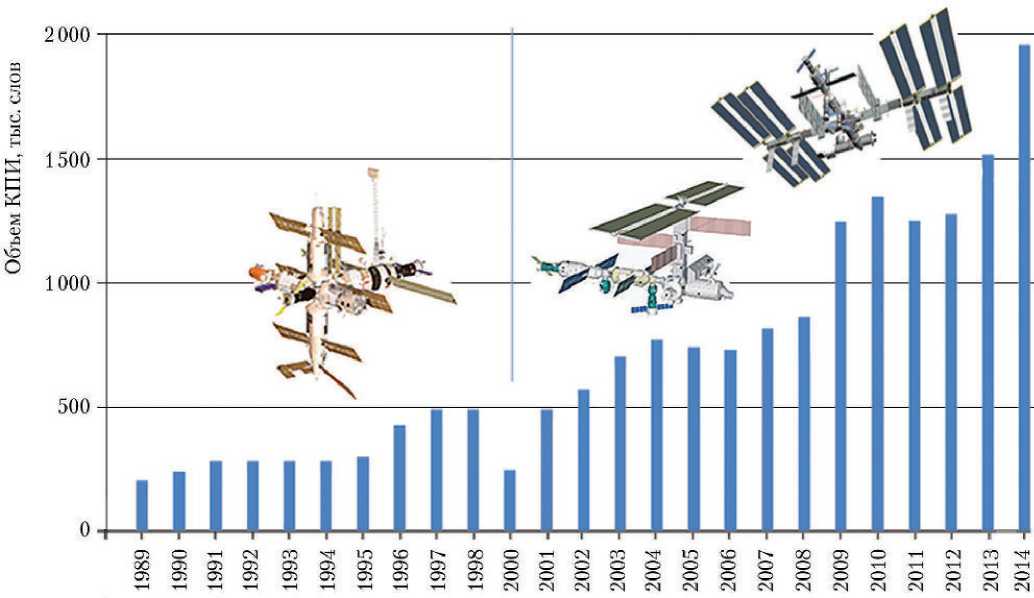
Рис. 3. Объем командно-программной информации (КПИ) для бортового комплекса управления орбитальных станций «Мир» и МКС
Таблица 2
|
Атрибут |
Значение |
Тип данных |
Объект в БД БКУ |
Объект в БД КИВК |
|
Идентификатор ИМП |
ВС2463 |
ТЕКСТ |
— |
— |
|
Идентификатор блока данных |
ВЕКТОР |
ТЕКСТ |
— |
— |
|
Номер формы |
371 |
ЦЕЛОЕ |
— |
— |
|
Номер объекта |
1 |
ЦЕЛОЕ |
— |
— |
|
Номер начального условия |
2 160 |
ЦЕЛОЕ |
— |
— |
|
Номер расчета |
1 |
ЦЕЛОЕ |
— |
— |
|
Виток |
2 463 |
ЦЕЛОЕ |
— |
— |
|
Время |
16.11.11.06.11.38, 0000 |
ВЕЩЕСТВЕННОЕ ДВОЙНОЙ ТОЧНОСТИ |
GTUDB_T |
TUTC_ASV |
|
Координата X |
–2944245.53931 |
ВЕЩЕСТВЕННОЕ ДВОЙНОЙ ТОЧНОСТИ |
GTUDB_X[0] |
X_KA |
|
Координата Y |
–3239724.27730 |
ВЕЩЕСТВЕННОЕ ДВОЙНОЙ ТОЧНОСТИ |
GTUDB_X[1] |
Y_KA |
|
Координата Z |
5135217.44333 |
ВЕЩЕСТВЕННОЕ ДВОЙНОЙ ТОЧНОСТИ |
GTUDB_X[2] |
Z_KA |
|
Координата VX |
4300.1522985500 |
ВЕЩЕСТВЕННОЕ ДВОЙНОЙ ТОЧНОСТИ |
GTUDB_X[3] |
VX_KA |
|
Координата VY |
–6214.9490041100 |
ВЕЩЕСТВЕННОЕ ДВОЙНОЙ ТОЧНОСТИ |
GTUDB_X[4] |
VY_KA |
|
Координата VZ |
–1437.2493386900 |
ВЕЩЕСТВЕННОЕ ДВОЙНОЙ ТОЧНОСТИ |
GTUDB_X[5] |
VZ_KA |
|
Баллистический коэффициент |
0,03176 |
ВЕЩЕСТВЕННОЕ ДВОЙНОЙ ТОЧНОСТИ |
GTUDB_X[6] |
K_BAL |
Содержание именованных массивов параметров (ИМП) на примере задания параметров вектора состояния МКС
Примечание. БД БКУ — база данных бортового комплекса управления; КИВК — командный информационно-вычислительный комплекс.
С29_КОРРЕКЦИЯ()
ЗАПРОС БФ=318 НУ=2360 ТЛГ=101 СБИ=38-2;
ДАННЫЕ ОРИЕНТАЦИЯ НА ИМПУЛЬС;
V_SMC_REB_TYPE = 1;
V_SMC_REB_DT = 0;
V_SMC_ZG1MODE3 = 0;
V_SMC_ZG2MODE3 = 0;
V_SMC_REB_T0 = "29.04.14.10.45.00-00.50.00";
V_SMC_REBT_TNCM = "29.04.14.10.45.00-00.35.00";
V_SMC_REBT_B1 = ORIENT H OCK+PA3BOPOT;
V_SMC_REBT_R1 = KVAT_0,KVAT_l,KVAT_2,KVAT_3;
КД;
ЦЕЛОЕ БЕЗЗНАКА _MCEK1;
ЗАПРОС БФ=112 НУ=2380 ТЛГ=1;
ДАННЫЕ ИМПУЛЬС_МЕТРЫ_СЕК;
V_SMC_REBT_DV = IMP_SIZE1_F;
V_SMC_REB_TMV15 = T_VKL_DU1 H Время 1-го импульса _МСЕК1 = 00 // Доли секунд времени 1-го импульса;
КД;
ЦЕЛОЕ БЕЗЗНАКА _REZERV[22];
ЗАПРОС БФ=318 НУ=2382 ТЛГ=102 СБИ=38-2;
ДАННЫЕ ОРИЕНТАЦИЯ_ПОСЛЕ_ИМПУЛЬСА;
V_SMC_REBT_TCO = "29.04.14.10.45.00+10";
V_SMC_REBT_B2 = ORIENT // ОСК+РАЗВОРОТ;
V_SMC_REBT_R2 = KVAT_0,KVAT_1,KVAT_2, KVAT_3;
V_SMC_REBT_UWR = 0.1;
V_SMC_REB_BRO = 300.0;
V_SMC_REB_BRK = 237.39;
V_SMC_REB_FI0 = 0.0;
V_SMC_REB_FI1 = 0.0;
GTUBM_BT1.B = 0001000001000000U;
GTUBM_BT2.B = 1110010000000000U;
GTUBM_BD1.B = F800X;
GTUBM_BZ1.B = 03FFX;
V_SMC_REB_BK2 = OX, 0, 0, 0, 0, 0;
GTUBM_B14.B = OX;
GTUBM_B15.B = OX;
GTUCA_KDK[0] = 0X,0X;
V_SMC_REB_UP.В = 1000000000000100U;
V_SMC_REB_DTRTGK = 0;
_REZERV[21] = о // Резерв, не используется;
КД;
Рис. 4. Пример именованного массива параметров
Пример задания расписания БПП и уставочных данных для операции «Коррекция орбиты МКС» с последующим переходом МКС в стандартный режим приведен ниже:
БПП *
ВИТ=1234
ТН7(34) КОРРЕКЦИЯ_OPƂ «C29_У^_КОРРЕКЦИЯ»
СТАН^АРТ «C29_У^_CTAH^APT»
В приведенном примере идентификатор команды КОРРЕКЦИЯ_OPƂ представляет собой ссылку на описание команды верхнего уровня загрузки уставочных данных для режима
«Коррекция орбиты» в базе данных команд. Это описание содержит значения полей кода команды в соответствии с техническим описанием ПО БВС. Специальное ПО «Редактор команд верхнего уровня» дает возможность пользователю разрабатывать новые команды или редактировать существующие.
Идентификаторы ИМП C29_У^_КОРРЕКЦИЯ и C29_У^_CTAH^APT содержат информацию о параметрах, задающих уставочные данные режимов «Коррекция орбиты» и «Стандартный»:
-
• тип данных;
-
• прототипы переменных в соответствии с БД БКУ;
-
• атрибуты форм обмена данными, содержащих значения параметров, рассчитанные смежными службами и группами ГОГУ;
-
• числовые значения параметров, задаваемые оператором.
В результате трансляции приведенного примера создаются два МЦИ для ЦВМ:
-
• команда загрузки расписания переходов в режимы «Коррекция орбиты», «Стандартный»;
-
• команда загрузки уставочных данных для БПП.
Аналогичный подход применен и для формирования суточных программ полета (СПП) функционального уровня СМ (ЦВМ) и других модулей РС МКС (ТВУ МИМ1, ТВУ МИМ2). Разработан язык описания СПП с едиными синтаксисом и семантикой для всех модулей РС МКС. Синтаксические конструкции языка СПП значительно богаче и разнообразнее, чем таковые в языке описания БПП. Циклограммы СПП содержат директивы вызова бортовых функций, так называемые «Управляющие воздействия» с переменными параметрами; директивы задания комплексных режимов бортовых систем; директивы выдачи отдельных команд управления. Опыт эксплуатации РС МКС на начальном этапе показал необходимость введения в СПП возможности выдачи пакетов команд в терминальные компьютеры модулей и в инфор-мационно-управляющую систему. Реализация этого предложения разработчиками ПО БКУ дало возможность централизованного программного управления реализацией комплексных полетных операций, в т. ч. операций с целевыми нагрузками. Для этого были введены соответствующие операторы в язык описания СПП.
На рис. 5 приведен пример типичного полного исходного текста СПП для РС МКС с именованным массивом параметров для управляющего воздействия. Как видно из исходного текста, программа полета функционального уровня на интервал полета длительностью 1 сут достаточно компактна и удобочитаема благодаря использованию ИМП и макрокоманд (устоявшаяся последовательность многократно используемых операторов, имеющих собственный идентификатор). В процессе трансляции указанной программы формируется развернутый исходный текст, содержащий раскрытые макрокоманды и ИМП. Фрагмент развернутого исходного текста СПП, полученного из исходных текстов СПП и ИМП с рис. 5 и 6, изображен на рис. 7. Как видно из приведенных фрагментов СПП, основное назначение программ полета функционального уровня — решение рутинных задач управления, не требующих сложной логики, которая выражается через различные директивы ветвления. Обычно в СПП РС МКС включаются команды для всех его модулей, которые, безусловно, должны быть выданы в заданное время в составе централизованной программы полета, что позволило значительно сократить использование командной радиолинии для выдачи команд в зонах радиовидимости КИП, освобождая их для управления другими КА, в частности, транспортными космическими кораблями «Союз» и «Прогресс». Строго говоря, командная радиолиния используется для управления полетом РС МКС в двух случаях: для ввода в память БКУ бортовых программ отложенного управления и для выдачи КПИ по дополнительному условию, которое невозможно сформулировать в виде логического условия в БВС.
Как уже говорилось выше, малые исследовательские модули МИМ1 и МИМ2 имеют возможность выполнения локальных СПП, исполняемых ТВУ в составе БВС этих модулей. Синтаксис языка описания СПП модулей идентичен синтаксису языка описания СПП РС МКС в ЦВМ. Единый синтаксис СПП модулей позволил унифицировать специальное математическое обеспечение (СМО) формирования МЦИ и снизить издержки на освоение приемов использования СМО персоналом управления.
На рис. 8 в качестве примера изображен алгоритм отключения динамического контроля в случае автоматического рестарта ТВМ. Этот алгоритм содержит проверки логических выражений на основе значений статусного параметра состояния БВС РС МКС (наличие рестарта ТВМ A_ST_WORD.A_ST.CTVMRST == 1, проверки условия подтверждения завершения рестарта A_ST_WORD.A_ST.CTVMRST == 0). Если признак рестарта снялся (рестарт завершен), выполняется ожидание признака готовности ТВМ. При выполнении логического условия «Готовность ТВМ» ( AS_TCRD == 1) выполняется управляющее воздействие F10_0 (9A00 hex, 0172 hex, 7FFF hex ) на формирование пакета передачи из ЦВМ в ТВМ управляющего воздействия с запретом динамического контроля. Данный алгоритм разработан специалистами ГОГУ для обеспечения управления РС МКС с автоматическим анализом значений телеметрируемых параметров РС МКС и автоматической выдачей команд управления в БКУ без вмешательства персонала управления с Земли.
РЦ *; ЗАПУСК;
ВИТ 3356;
-
(КО(47)+60); БИТС "ЗАП-А" СК=01 ПР=02 ВИТ=3362 ТК=(Н7(35)-60) ;
ВИТ 3363;
(К7(35}-300); БИТС "ВОСПР-А Обратное";
ВИТ 3364;
(КО(35)+60); БИТС "ЗАП-А" СК=08 ПР=02 ВИТ=3365 ТК=(Н7 (33)- 60} ;
ВИТ 3365;
(К7(33)-210) ; БИТС "ВОСПР-А Обратное";
РЦ *; ЗАПУСК;
ВИТ 3353;
(Н7{34)); *ДЫМ_Ц();
ВИТ 3355;
(Н7(47)) ; *КОНТР_ШИН();
ВИТ 3366;
(Н7(33)); УВТ F4_AOT ИНФ=83;
*СБРОС(33);
РЦ *; ЗАПУСК;
%Прим.1
(07.11.14.10.23.00); УВТ F19_0 ИНФ_БК="ТМ_КАДР_2б";
%Прим.2
*ТМ_МАС_РТ_177_21();
РЦ *; ЗАПУСК;
%Прим.10
*РБО(3352/34/34);*РБО(3353/34/34);*РБО(3355/47/47);
*РБО(3362/35/35);*РБО(3363/35/35);*РБО(3364/35/35);*РБО(3366/33/33)
РЦ *; ЗАПУСК;
%Прим.12
-
*ГФИ_11_СБРОС_УСМ(3365/33/33);
РЦ *; ЗАПУСК;
%Прим.11
-
*БТН_НЕЙТРОН(3354/34/34) ;
РЦ *; ЗАПУСК;
%Прим.14
(07.11.14.09.11.00); *НЧ_БПИ();
%Прим.15
ВИТ 3353 ;
(КО(34)+60); *НЧ();
ВИТ 3354;
(КО(34)+60); *НЧ();
ВИТ 3355;
(07.11.14.13.58.00); УВТ FB_20 ИНФ=1,0;
(КО(47)+60); *НЧ();
ВИТ 3356;
(07.11.14.15.21.00); УВТ FB_20 ИНФ=2,0;
(КО(47)+120); *НЧ();
ВИТ 3362;
(КО(35)+60); *НЧ();
%Прим.14
(08.11.14.00.59.00); УВТ FB 6;
П 60; КОМ 02022;
РЦ 33;
%Прим.5
(07.11.14.10.33.00); yBTFl_38;
ВЫХОД; КОНЕЦ 07.11.14.18.00.00;
Рис. 5. Пример исходного текста суточной программы полета Российского сегмента МКС
ТМ_КАДР_26(TBM/F19_0)
ЦЕЛОЕ БЕЗЗНАКА _УП_СЛОВО,_НОМ_3АЛРОСА;
ЦЕЛОЕ БЕ 3 3НАКА _ИМЯ1,_ИМЯ2,_ИМЯ3,_ИМЯ4,_ИМЯ5,_ИМЯ6;
ЦЕЛОЕ БЕЗЗНАКА _АДР1[3],_АДР2[3],_АДРЗ[3],_АДР4[3],_АДР5[3],_АДРб[3]; ДАННЫЕ МИКРОСКОП;
УП_СЛОВО = 1004Х //ТМ 4, режим <Микроскоп>;
_НОМ_ЗАПРОСА = 0050Х //Номер запроса;
_ИМЯ1 = 0003Х //V_TIME_4;
_АДР1[0] = 2001Х, 0000Х, 0004Х //Время измерения;
ИМЯ2 = 0003Х //GTIFVW;
_АДР2[0] = 4804Х, 0000Х, 000CX //Вектор угловой скорости КА в ССК;
_ИМЯЗ = 0003Х //GTIFE_WPR;
_АДРЗ[0] = С300Х, 0000Х, 000CX //Оценка угловой скорости;
_ИМЯ4 = 0003Х //GTIFQ_N;
_АДР4[0] = 4803Х, 0004Х, 000CX //х, у, z - компоненты кватерниона N;
_ИМЯ5 = 0003Х //GTIFVWB;
_АДР5[0] = 4805Х, 0000Х, 000CX //Требуемая угловая скорость КА в ССК;
_ИМЯ6 = 0003Х //GTIFR_U;
АДР6[0] = 3000Х, 0000Х, 0010Х //Упр. сигн. для рулевых машинок КД1 и КД2;
КД;
Рис. 6. Пример исходного текста именованных массивов параметров для суточной программы полета
|
0064 |
Значение:100 |
||
|
%--------------- канал 4 ---------- РЦ 4 ; ЗАПУСК; %Прим. 1 (07.11.14.10.23.00); УВТ F19 0 ИНФ БК="ТМ КАДР 26"; 1004 1004Х " 0050 0050Х 0003 0003Х 2001 2001Х 0000 ООООХ 0004 0004Х 0003 0003Х 4804 4804Х 0000 ООООХ 000с 000CX 0003 0003Х С300 сзоох 0000 ООООХ 000с ооосх 0003 0003Х 4803 4803Х 0004 0004Х 000с ОООСХ 0003 0003Х 4805 4805Х 0000 ООООХ 000с ОООСХ 0003 0003Х 3000 3000Х 0000 ООООХ 0010 0О1ОХ % Прим. 2 % *ТМ МАС РТ 177 21 () ; УВТ F4 STOP RT ИНФ=177; ООЫ Значение: 177 УВТ F4 STOP_RT ИНФ=179; ООЬЗ Значение:179 %--------------- канал 5 ---------- УВТ F4 STOPRT ИНФ=180; 00Ь4 Значение:180 УВТ F4 STOP RT ИНФ=181; 00Ь5 Значение:181 УВТ F4 РТ ИНФ=177; ООЫ Значение: 177 УВТ F4 РТ ИНФ=179; ООЬЗ Значение:179 УВТ F4_PT ИНФ=180; 00Ь4 Значение:180 УВТ F4 РТ ИНФ=181; |
07.11.14.10.23.00 ТМ 4, режим <Микроскоп> Номер запроса V_TIME_4 Время измерения GTIFV_W Вектор угловой скорости КА в ССК GTIFE_WPR Оценка угловой скорости GTIFQ_N х, у, z - компоненты кватерниона N GTIFV_WB Требуемая угловая скорость КА в ССК GTIFR_U Упр. сигн. для рулевых машинок КД1 07.11.14.10.23.01 07.11.14.10.23.02 07.11.14.10.23.05 07.11.14.10.23.06 07.11.14.10.23.07 07.11.14.10.23.08 07.11.14.10.23.09 07.11.14.10.23.10 |
||
Рис. 7. Развернутый исходный текст суточной программы полета с именованными массивами параметров (фрагмент)
Реализация подобных алгоритмов посредством СПП функционального уровня довольно затруднительна (хотя и возможна). Вместе с тем, их реализация может быть достаточно простой и эффективной, если использовать циклограмму ПВУ приборного уровня.
Циклограммы ПВУ в ЦВМ и ТВМ служебного модуля МКС обеспечивают возможность управления отдельными приборами БКУ с учетом изменения значений любых телеметрических параметров, имеющихся в ЦВМ или ТВМ, соответственно. Наличие разнообразных директив ожидания логического условия, условных и безусловных переходов, циклов, логических и арифметических выражений позволяет применять циклограммы ПВУ для реализации сложных, нестандартных процедур управления отдельными приборами и системами. Для обеспечения надежного и безошибочного формирования циклограмм был разработан формальный алгоритмический язык описания циклограмм ПВУ. На рис. 9 и 10 приведены исходный текст и МЦИ циклограммы ПВУ, реализующей алгоритм управления, представленный на рис. 8.

Рис. 8. Пример алгоритма циклограммы программновременного управления центральной вычислительной машины Российского сегмента МКС
Примечание. ТВМ — терминальная вычислительная машина; ЛУ — логическое условие; УВ — управляющее воздействие.
Второй важнейшей задачей КПУ РС МКС является контроль достоверности КПИ. Большой объем управляющей информации, наличие параллельного исполнения множества циклограмм с ветвлениями, директив записи данных в переменные ПО БВС потребовали обеспечить возможность имитационного моделирования исполнения директив циклограмм (каналов) СПП, исполнения директив ПВУ. Моделирование исполнения директив отложенного управления (интерпретация КПИ) необходимо для отладки алгоритмов, реализуемых с помощью директив управления, поиска логических и операторских ошибок в массивах КПИ. Имитационное моделирование осуществляется с помощью стенда наземного комплекса отладки (НКО), основное назначение которого — отладка ПО БВС [3]. В дополнение к НКО были разработаны упрощенные модели бортовых программных комплексов прямого и отложенного управления в ЦВМ и ТВМ СМ. Разработка упрощенных моделей обеспечила возможность быстрой проверки соответствия между КПИ и детальным планом полета (ДПП) в процессе формирования КПИ. ПО моделирования размещается в персональном компьютере на рабочем месте специалиста ГОГУ, что дает возможность выполнить моделирование с минимальными затратами времени и проверить несколько вариантов КПИ до начала работы со стендом НКО.
Ранее подобные модели были применены при решении задач КПУ орбитальной станцией «Мир». Интерпретация КПИ заключается в выполнении следующих действий [4]:
-
• имитация исполнения директив, включенных в состав массивов цифровой информации,
поступающих в интерпретатор КПИ, содержащий набор моделей БКУ;
-
• формирование массивов данных, описывающих изменения состояния переменных в модели ОЗУ БКУ;
-
• определение моделируемого времени исполнения директив;
-
• формирование служебной телеметрической информации (ТМИ) о событиях, происходящих в моделях, включая изменения состояния модели ОЗУ.
На рис. 11 изображена схема технологического процесса формирования МЦИ для БВС, показывающая место имитационного моделирования на примере формирования и отработки циклограмм СПП [1]. При разработке интерпретатора КПИ для РС МКС был использован подход, ранее апробированный в интерпретаторе СУД для орбитальной станции «Мир», однако состав бортовых программных комплексов отложенного во времени управления БВС РС МКС потребовал создания большего количества программных модулей для моделирования. Имитация исполнения директив управления осуществляется в программных модулях, имитирующих бортовые программные комплексы прямого и отложенного управления в ЦВМ и ТВМ. К таким модулям относятся (рис. 12):
-
• модуль приема и обработки КПИ в виде пакетов CCSDS ;
-
• модуль исполнения директив командной радиолинии — интерпретатор командной радиолинии;
-
• модуль исполнения директив СПП — интерпретатор СПП;
-
• модуль исполнения КВУ — интерпретатор КВУ;
-
• модуль исполнения расписания сеансов связи — интерпретатор расписания сеансов связи.
06.01.80.03.00.00,000
Программные модули имитации работы бортовых программных комплексов выполняются последовательно в порядке, определяемом частотой исполнения бортовых программ и таблицей приоритетов, которые установлены для интерпретатора КПИ. После завершения работы каждого программного модуля выполняется формирование массива моделируемой и специальной программной ТМИ.
Обработка, документирование и отображение ТМИ осуществляется в реальном времени моделирования на каждом шаге цикла моделирования, как показано на рис. 12 [1]. Результаты обработки ТМИ записываются в протокол моделирования ( log -файл), который сравнивается с ДПП. По результатам сравнения оператор принимает решение о соответствии/несоответствии КПИ и ДПП.
Ц Номер=0011 Пуск=Н Ини=Д Нач.адр= Удал.из К=Н Пост.хранить=Д
МЕТКА=МЕТ0
ЛУ HaeH=A_ST_WORD.A_ST.CTVMRST
Смещение=5 К-во бит=01 Биты=1и
П 00.00.10,000
УПБ MfleH=A_ST_WORD.A_ST.CTVMRST
Смещ=5 S=0 Метка перехода=МЕТ0
ДУ Идeн=AS_TCRD
Смещение=0000 К-во бит=01 Биты=Ш
УВ Иден=Е10_0 Контроль=Н
Инф =9А00Х 0172Х 7FFFX
КОНЕЦ Т=23.59.00
Рис. 9. Пример исходного текста циклограммы программно-временного управления центральной вычислительной машины Российского сегмента МКС
|
Код |
БСП |
Комментарий (Бортовая шкала времени GPS-UTC=??) |
|
|
* |
Obld 4000 0051 0000 0000 0068 2000 0000 91be 2800 1704 001С |
2946 |
APID=797 ЦУП-М ЦВМ CM Начало сегмента; SF=01; N пакета PSC=0 Длина пакета 81 байт В ВВС СМ не используется В БВС СМ не используется РТ=8; TID=1 PID=4 Российская информация PIDF0=0 PIDFl=0 пакеты РККЭ Резервное поле Директива записи циклограммы,БСП= 2946 Адрес в буфере Длина циклограммы 28 |
|
000b |
2947 |
Код имени Ц = 11 ,с пост.хранением |
|
|
0000 |
2948 |
Адрес метки СТОП |
|
|
0 |
6600 |
2949 |
Календарное время |
|
1 |
0000 |
2950 |
ДМВ 06.01.80.03.00.00 |
|
2 |
0000 |
2951 |
GMT 06.01.80.00.00.00 |
|
3 |
0000 |
2952 |
_______1 1_______ |
|
4 |
2181 |
2953 |
Логическое условие без контр.врем., к-во бит=1 |
|
5 |
0005 |
2954 |
Смещение в битах от начала поля=5 |
|
6 |
1е00 |
2955 |
Табличная адресация: A ST WORD.A ST.CTVMRST |
|
7 |
0003 |
2956 |
рестарт ТВМ |
|
8 |
0000 |
2957 |
Поле битов: Биты: |
|
9 |
0001 |
2958 |
1U |
|
10 |
680а |
2959 |
Короткая пауза 00.00.10,000 |
|
11 |
4965 |
2960 |
Усл.переход по биту N 5 =0 адресация- табличная |
|
12 |
0004 |
2961 |
Адрес перехода:адресация по метке МЕТО 0004 |
|
13 |
1е00 |
2962 |
Табличная адресация: A ST WORD.A ST.CTVMRST |
|
14 |
0003 |
2963 |
рестарт ТВМ |
|
15 |
2001 |
2964 |
Логическое условие без контр.врем., к-во бит=1 |
|
16 |
0004 |
2965 |
Смещение в битах от начала поля=4 |
|
17 |
1800 |
2966 |
Абсолютная адресация: AS TCRD |
|
18 |
ЬЬ8а |
2967 |
Готовность ТВМ |
|
19 |
0000 |
2968 |
Поле битов: Биты: |
|
20 |
0001 |
2969 |
1U |
|
21 |
9а03 |
2970 |
Управляющее воздействие |
|
22 |
ОаОО |
2971 |
Мфун=10 Мдан=0 Формирование CCSDS-пакета ЦВМ -> ТВМ |
|
23 |
7f ff |
2972 |
Маска режимов |
|
24 |
9а00 |
2973 |
Вводимая информация: 9А00Х |
|
25 |
0172 |
2974 |
Вводимая информация: 0172Х |
|
26 |
7f ff |
2975 |
Вводимая информация: 7FFFX |
|
27 |
7e00 |
2976 |
Директива конца циклограммы ПВУ |
|
* |
7e00 e0c2 Obld 8001 0029 0000 0000 |
Директива конца циклограммы КРЛ Контрольная сумма APID=797 ЦУП-М ЦВМ СМ Конец сегмента; SF=10; N пакета PSC=1 Длина пакета 41 байт В БВС СМ не используется В БВС СМ не используется |
Рис. 10. Массив цифровой информации с циклограммой программно-временного управления центральной вычислительной машины служебного модуля МКС (фрагмент)

Рис. 11. Моделирование в процессе формирования команднопрограммной информации
Примечание. ИД — исходные данные; МЦИ — массив цифровой информации; БВС — бортовая вычислительная система; БД — база данных; БКУ — бортовой комплекс управления; ДПП — детальный план полета.
Для оценки результатов реализации технологии формирования МЦИ и обеспечения контроля соответствия МЦИ исходным данным введем показатель качества формирования МЦИ K МЦИ в виде отношения количества ошибочно сформированных МЦИ (считая, что каждая ошибка соответствует одному ошибочному слову) к общему количеству слов МЦИ, введенных в БКУ по командной радиолинии:
,
МЦИ jy ’ где Nf — количество слов МЦИ, содержащих ошибки; N — общий объем МЦИ, введенных в БКУ.
В табл. 3 приведено распределение ошибок формирования МЦИ при управлении полетом орбитальных станций («Мир» в 1989–1998 г. и РС МКС в 2000–2014 г.) и значения качества формирования МЦИ, рассчитанные по приведенной выше формуле.
Данные для указанной таблицы были предоставлены специалистами группы КПУ (объем МЦИ РС МКС) и группы подготовки персонала ГОГУ станции «Мир» и РС МКС (ошибки формирования МЦИ). Данные по объему МЦИ для орбитальной станции «Мир» взяты из работы [1]. Под ошибками формирования МЦИ здесь понимаются не общее количество ошибок персонала ГОГУ, а только количество МЦИ, не соответствующих ДПП и введенных в БКУ.
Таблица 3
Распределение ошибок формирования массива цифровой информации (МЦИ)
|
Год |
МЦИ, тыс. слов |
Количество ошибочных МЦИ |
Качество МЦИ K МЦИ |
|
1989 |
200 |
28 |
0,8600 |
|
1990 |
240 |
22 |
0,9083 |
|
1991 |
280 |
18 |
0,9357 |
|
1992 |
280 |
16 |
0,9429 |
|
1993 |
280 |
11 |
0,9607 |
|
1994 |
280 |
3 |
0,9893 |
|
1995 |
300 |
2 |
0,9933 |
|
1996 |
430 |
6 |
0,9860 |
|
1997 |
490 |
6 |
0,9878 |
|
1998 |
490 |
4 |
0,9918 |
|
2000 |
245 |
20 |
0,9184 |
|
2001 |
490 |
8 |
0,9837 |
|
2002 |
570 |
12 |
0,9789 |
|
2003 |
703 |
1 |
0,9986 |
|
2004 |
772 |
3 |
0,9961 |
|
2005 |
743 |
2 |
0,9973 |
|
2006 |
730 |
1 |
0,9986 |
|
2007 |
820 |
0 |
1,0000 |
|
2008 |
866 |
3 |
0,9965 |
|
2009 |
1 250 |
1 |
0,9992 |
|
2010 |
1 350 |
1 |
0,9993 |
|
2011 |
1 253 |
1 |
0,9992 |
|
2012 |
1 278 |
1 |
0,9992 |
|
2013 |
1 525 |
0 |
1,0000 |
|
2014 |
1 963 |
1 |
0,9995 |
По данным, представленным в табл. 3, построены диаграммы распределения ошибок формирования МЦИ для БКУ станции «Мир» и РС МКС (рис. 13) и качества формирования МЦИ (рис. 14).
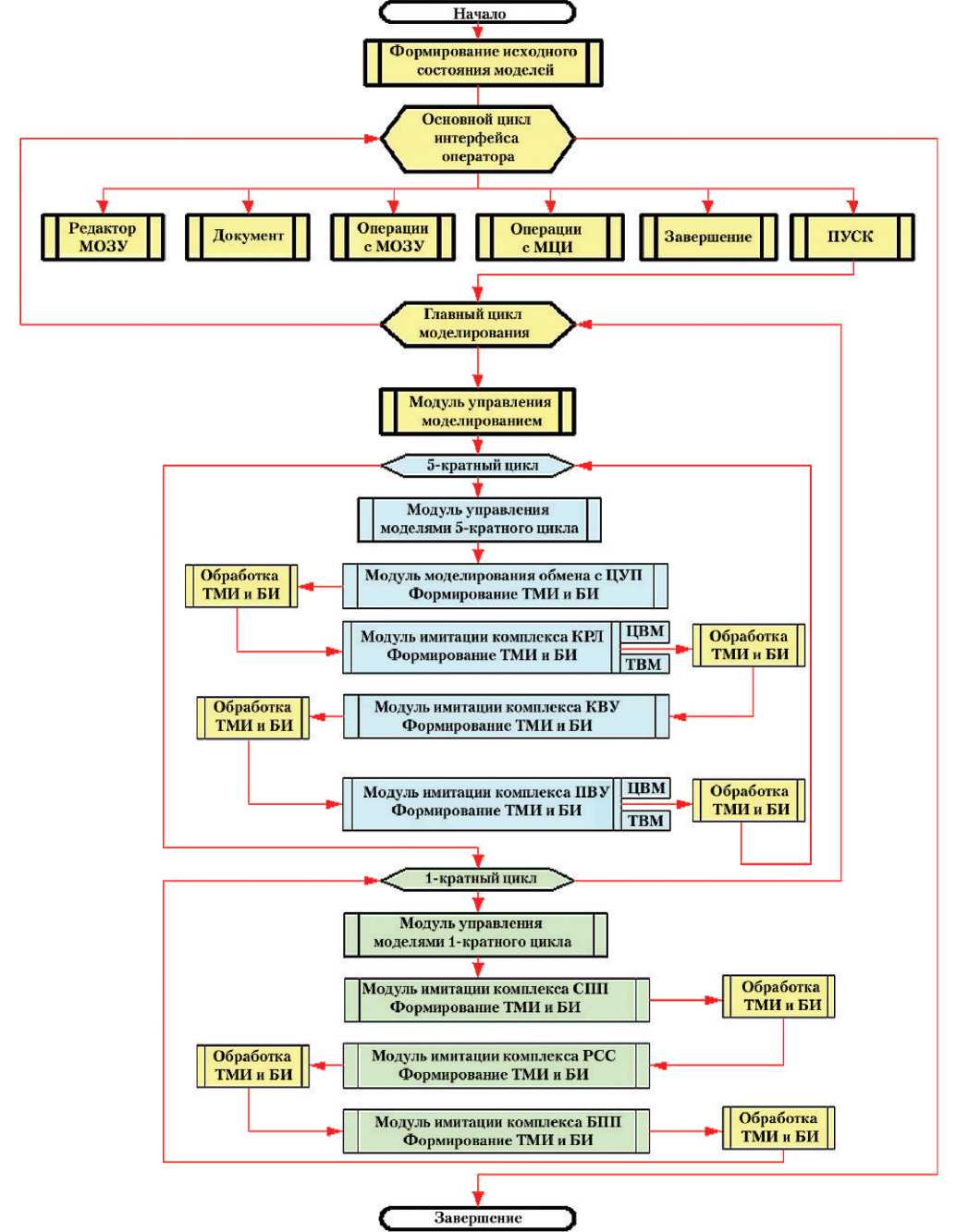
Рис. 12. Блок-схема моделирования исполнения командно-программной информации в бортовой вычислительной системе служебного модуля МКС
Примечание. МОЗУ — модель оперативного запоминающего устройства; МЦИ — массив цифровой информации; ТМИ — телеметрическая информация; БИ — баллистическая информация; КРЛ — командная радиолиния; КВУ — команда верхнего уровня управления; ПВУ — программно-временное управление; СПП — суточная программа полета; РСС — расписание сеансов связи; ЦВМ, ТВМ — центральная и терминальная вычислительные машины.
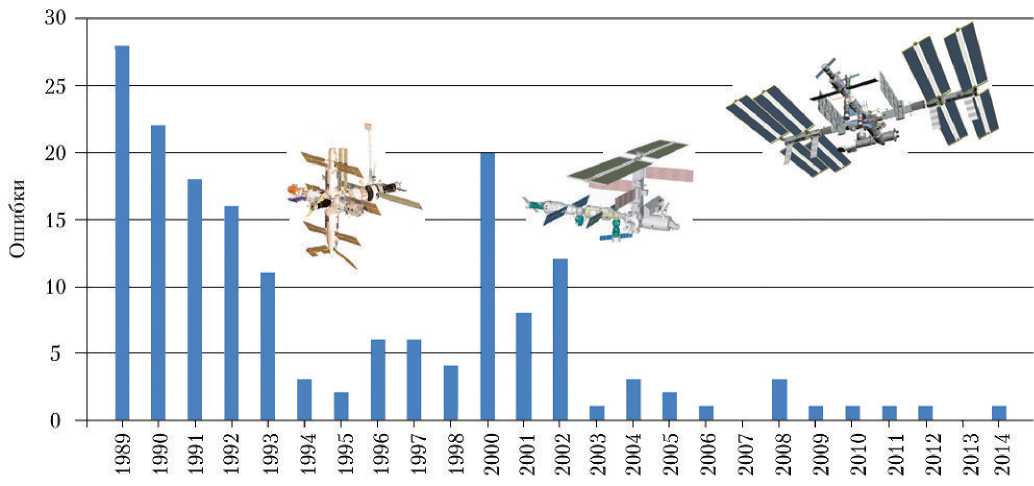
Рис. 13. Распределение ошибок формирования массива цифровой информации по годам полета станции «Мир» и Российского
сегмента МКС
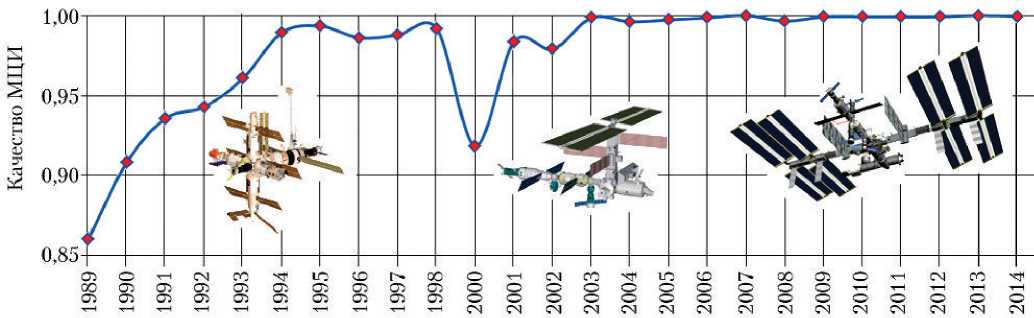
Рис. 14. Качество формирования массива цифровой информации (МЦИ) для бортового комплекса управления станции «Мир»
и Российского сегмента МКС
Из приведенных графиков следует, что решения по технологическому обеспечению КПУ РС МКС в части формирования массивов цифровой управляющей информации обеспечили высокий уровень качества управления РС МКС. Это становится особенно важным в условиях постоянного роста количества полетных операций, реализуемых на борту РС МКС.
В заключение выскажем некоторые соображения по возможности применения методов формирования КПИ для РС МКС при решении задач управления полетом существующих и перспективных КА. Технология формирования КПИ для БКУ РС МКС обеспечивает независимость от типов командно-измерительных систем. Этот подход позволяет использовать единое ПО формирования КПИ как для ее передачи через средства НКУ, так и через любой спутниковый комплекс контроля и управления, включая систему на базе сети командно-измерительных систем «Клен-Р» и единой командно-телеметрической системы в составе бортовой аппаратуры РС МКС. Этот тезис подтверждается опытом управления РС МКС через существующую спутниковую систему TDRSS, эксплуатируемую агентством NASA. Кроме того, ПО формирования МЦИ с высоким уровнем формализации описаний постоянных, переменных и оперативных исходных данных обеспечивает возможность быстрого создания ПО формирования МЦИ для управления любыми существующими и перспективными КА, требующими оперативной разработки и ввода в БКУ бортовых программ полета или полетных заданий.
Выводы
Широкое применение формализованных переменных исходных данных в виде таблиц описания переменных и именованных массивов параметров в сочетании с созданием формальных языков описания БПП высокого уровня в процессе формирования КПИ в сочетании с оперативным имитационным моделированием работы БКУ обеспечило решение основных задач КПУ РС МКС с высоким качеством. Этот тезис подтверждается значительным снижением количества ошибок персонала управления с одновременным многократным увеличением общего объема КПИ по сравнению с аналогичными показателями для орбитальной станции «Мир». При этом численность персонала управления, задействованного в формировании КПИ, не увеличилась.
Разработка и дальнейшее совершенствование СМО КПУ РС МКС выполняется в рамках традиционной кооперации, сложившейся в период летно-конструкторских испытаний орбитальной станции «Мир». Так, СМО формирования и передачи КПИ в БКУ РС МКС было разработано специалистами ЦНИИ-маш (рис. 4–7, 9, 10 подготовлены с использованием СМО КИВК ЦУП ЦНИИмаш) с участием сотрудников РКК «Энергия». Последние выполнили разработку технических требований, методик решения задач КПУ, разработку синтаксиса и семантики формальных проблемноориентированных языков описания БПП. Отдельно стоит разработка программного обеспечения имитационного моделирования БКУ. Разработка ПО интерпретатора КПИ и методики его применения были выполнены сотрудниками РКК «Энергия» с использованием результатов, полученных в ходе работы над кандидатской диссертацией одного из авторов.
Список литературы Командно-программное управление полетом Российского сегмента МКС
- Соловьев В.А., Лысенко Л.Н., Любинский В.Е. Управление космическими полетами. В 2 т./Под общ. ред. Л.Н. Лысенко. М.: Изд-во МГТУ им. Н. Э. Баумана, 2009. Т. 2. 426 с.
- Вишнеков В.Е., Кравец В.Г. Перспективы использования опыта разработки и эксплуатации системы связи со станцией «Мир» и кораблем «Буран» для Российского сегмента Международной космической станции//Космическая техника и технологии. 2013. № 3. С. 66-73.
- Микрин Е.А. Бортовые комплексы управления космическими аппаратами и проектирование их программного обеспечения. М.: Издательство МГТУ им. Н.Э. Баумана, 2003. 336 с.
- Коваленко А.А., Станиславов И.В. О некоторых средствах обеспечения надежности командно-программного управления пилотируемым космическим аппаратом//К.Э. Циолковский и проблемы развития науки и техники: материалы XXXIX научных чтений памяти К.Э. Циолковского. Калуга: ИД «Эйдос», 2004. С. 80.
