Компьютерное моделирование динамики элемента сухого некулонова трения

Автор: Лушников Б.В.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Машиностроение
Статья в выпуске: 1-2 т.12, 2010 года.
Бесплатный доступ
Приведены результаты компьютерного моделирования в среде Simulink/MatLab динамики элемента с сухим некулоновым трением, математическая модель которого позволяет реализовывать фрикционные автоколебания. Тестирование представленных компьютерных моделей показало их достаточную адекватность для возможности исследования закономерностей движения и особенностей динамических процессов систем с сухим некулоновым трением.
Сухое трение, компьютерное моделирование, динамические системы
Короткий адрес: https://sciup.org/148198960
IDR: 148198960 | УДК: 539.621
Computer modeling of dry uncoulomb friction element'S dynamics
Results of computer modeling in the Simulink/MatLab environment of an element's dynamics with dry unCou-lomb friction which mathematical model allows to realize frictional self-oscillations are presented. Testing of the offered computer models has shown their sufficient adequacy for possibility of research of laws of motion and features of dynamic processes of systems with dry unCoulomb friction.
Текст научной статьи Компьютерное моделирование динамики элемента сухого некулонова трения
движения, а также разработка достоверных методов идентификации динамических параметров механических систем с сухим некулоновым трением.
Для компьютерного моделирования динамики элемента с действующей силой сухого не-кулонова трения необходимо учитывать следующие факторы. Во-первых, необходимо выявить и задать так называемую «активную» обобщенную силу Q A как сумму всех действующих на систему сил, кроме сил сухого трения и сил инерции. Тогда уравнение движения тела массой m по обобщенной координате q можно представить в следующем виде:
q=-( Qa - Qtr )
m . (1)
В выражении (1) силу сухого некулонова трения Q TR зададим следующим образом:
9tnG?> —
/ ~F^'ec'™ 4 > °?
} Рто,если. q < 0;
)-Ол,еыи4 = Он |А| -I Г„,еслж|(Ы >F„
где FT D = F 0 — b 1 q + b 3 q & 3 - сила сухого некуло-нова трения движения; F TP – сила сухого трения покоя. При этом обычно F TP >F 0 .
Для построения и исследования математических моделей будем использовать среду визуального моделирования динамических систем Simulink/MATLAB [6]. Для численного решения уравнения (1) с учетом (2) создадим универсальный блок (рис. 1), входом которого будет являться текущее значение обобщенной активной силы Q A , а выходом – текущее значение обобщенной скорости q . Представленная блок-схема обеспечивает расчет обобщенной скорости
(выход 1 – «Skorost») динамической системы с сухим некулоновым трением при действии на неё некоторой внешней обобщенной активной силы (вход 1 – «QA»). Два дополнительных выхода рассмотренного блока подсистемы моделирования сухого некулонова трения позволяют исследовать изменения во времени ускорения (выход 2 – «Uskorenie») и самой силы сухого трения (выход 3 – «Fnec»).
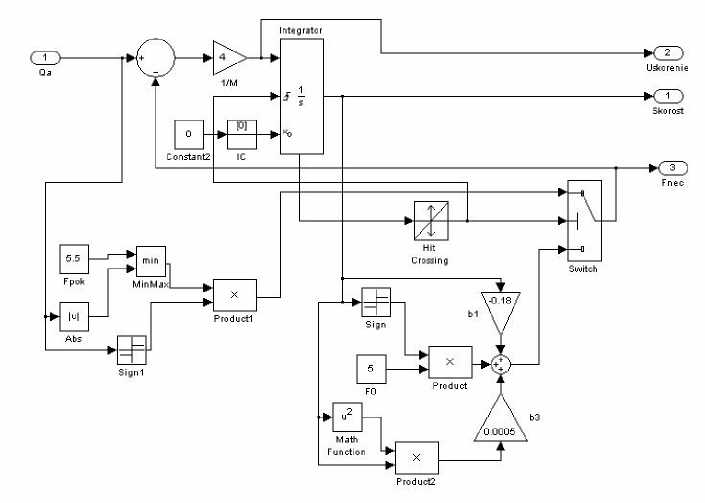
Рис. 1. Блок-схема подсистемы моделирования сухого некулонова трения
Рассмотрим теперь результаты компьютерного математического моделирования динамического поведения простейшей системы с сухим некулоновым трением, расчетная схема которой представлена на рис. 2, находящейся под воздействием внешней гармонической силы Psin ( ωt + φ ).
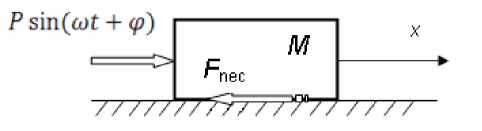
Рис. 2. Расчетная схема простейшей динамической системы с сухим некулоновым трением
Дифференциальное уравнение, описывающее поведение рассматриваемой системы, имеет следующий вид:
Mx + Fnec (x) = P sin (го • t + ф)
где M – приведенная масса системы; Fnec ( x & ) – значение некулоновой силы сухого трения, определяемой согласно выражению (2); P, ω, φ – соответственно амплитуда, частота и начальная фаза вынуждающей гармонической силы.
На рис. 3 представлена блок-схема Simulink-модели для численного интегрирования уравнения (3) установленным методом ode 23 (Bogacki-Shampine) с переменным шагом и относительной точностью 10-5.
На рис. 4 показаны графики изменения во времени отдельных динамических характеристик рассматриваемой системы, синхронизированные во времени. Это позволяет эффективнее проанализировать характер их поведения и взаимозависимость. Например, из анализа представленных графиков отчетливо видно, что скольжение груза начинается при превышении вынуждающей силой силы трения покоя F pok =5,5 Н. Остановка системы происходит, когда сила трения и вынуждающая силы уравновесятся силами инерции. Движение системы в данном случае реализуется с продолжительными остановками. Сила трения во время этих остановок (схватывания с опорной поверхностью) «копирует» вынуждающую гармоническую силу, что хорошо согласуется с известными физическими представлениями.
Закон изменения самой силы сухого трения во времени имеет сложный характер, обусловленный прерывистостью движения, изменением направления движения и зависимостью значения силы некулонова трения от значения скорости скольжения. Реализуемый закон силы сухого некулонова трения в функции скорости скольжения представлен на рис. 5. Петля гистерезиса, площадь которой соответствует рассеиваемой силами трения механической энергии за один период движения системы, представлена на рис. 6.
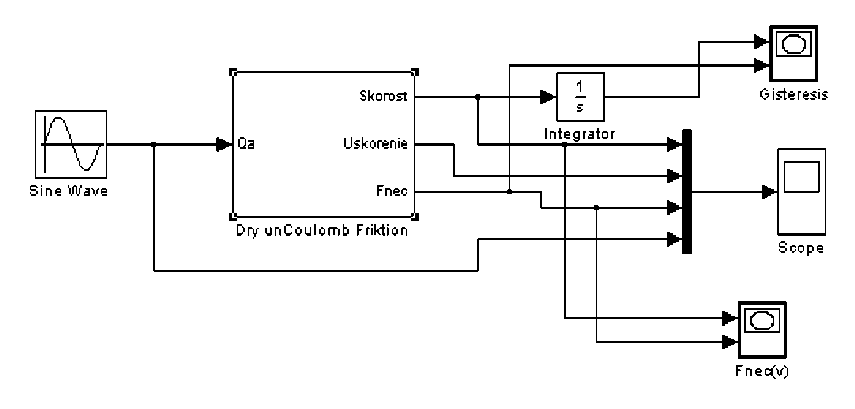
Рис. 3. Блок-схема Simulink-модели простейшей динамической системы с сухим некулоновым трением
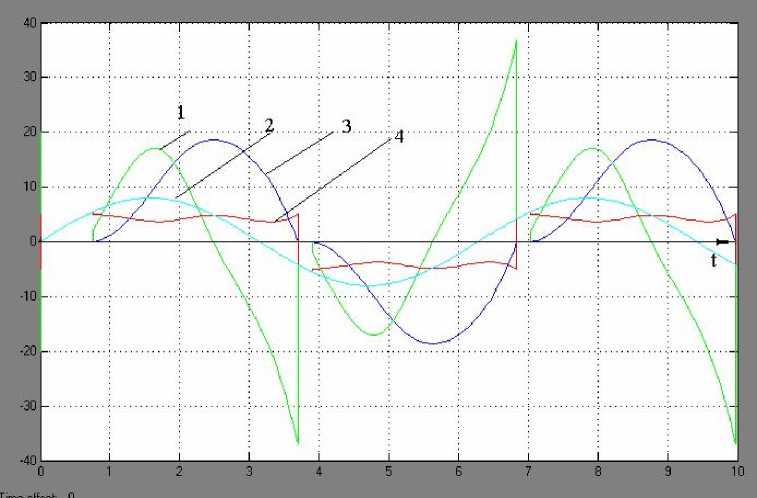
Рис. 4. Законы изменения во времени динамических характеристик исследуемой системы: 1 – ускорение, 2 – вынуждающая гармоническая сила, 3 – скорость, 4 – сила сухого некулонова трения
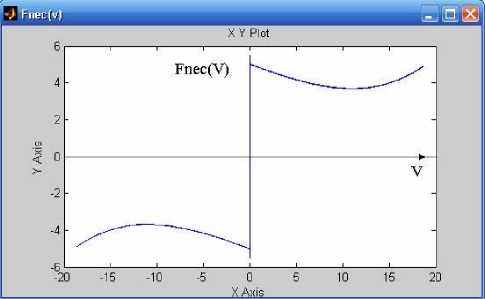
Рис. 5. Закон изменения силы сухого некулоно-ва трения от скорости скольжения ( F poc =5,5 (Н); F 0 =5 (Н); b 1 =0,18 Hc/м, b 3 =0,005 Нс3/м3)
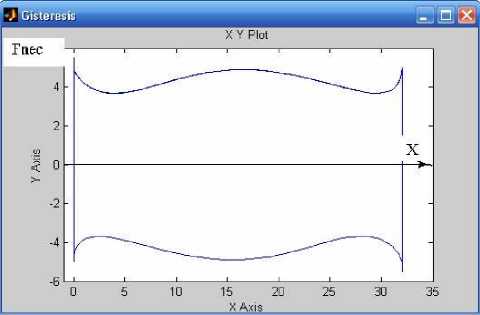
Рис. 6. Петля гистерезиса системы с некулоновым трением
Для проверки адекватности функционирования разработанного комплекса по моделированию динамических процессов в системах с сухим некулоновым трением рассмотрим классическую задачу возникновения фрикционных автоколебаний в такой системе, причиной которых как раз и является наличие падающего участка на законе Fnec ( x & ) . Расчетная схема исследуемой динамической системы представлена на рис. 7. Дифференциальное уравнение динамики данной системы имеет вид:
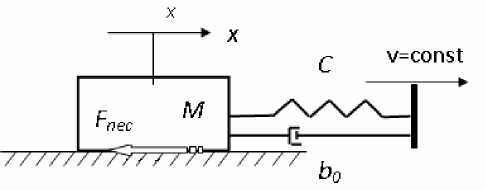
Рис. 7. Расчетная динамическая схема системы для исследования фрикционных автоколебаний
Mx + Fnec (x) + C (x - vt) + b 0( x^ - v) = 0, (4)
где C – коэффициент жесткости упругого элемента; b 0 – коэффициент вязкого сопротивления; v=const – постоянная скорость перемещения правого конца упругого элемента; F nec ( x & ) – закон изменения силы сухого некулонова трения с падающей характеристикой от скорости в соответствии с принятой моделью (2).
Блок-схема Simulink-модели для численного решения уравнения (4) представлена на рис. 8. При исследовании приняты следующие значения параметров математической модели (4): M =0.25(кг); С =2(Н/м); b 0 =0.12 (Нс/м); v =4(м/с); F poc =F 0 =5 (Н); b 1 =0,18 Hc/м, b 3 =0,005 Нс3/м3.
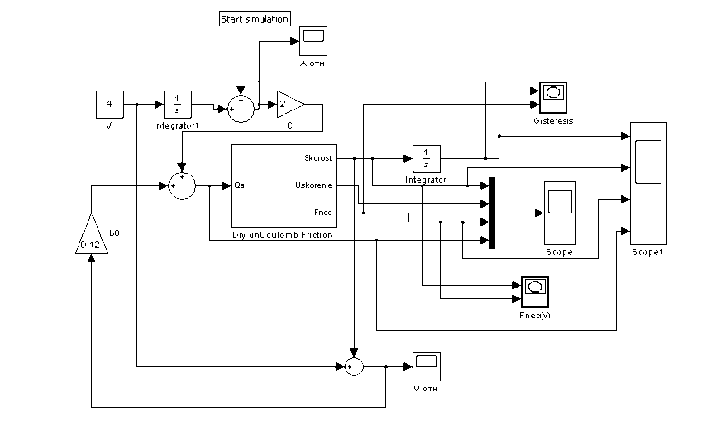
Рис. 8. Блок-схема Simulink-модели для исследования фрикционных автоколебаний
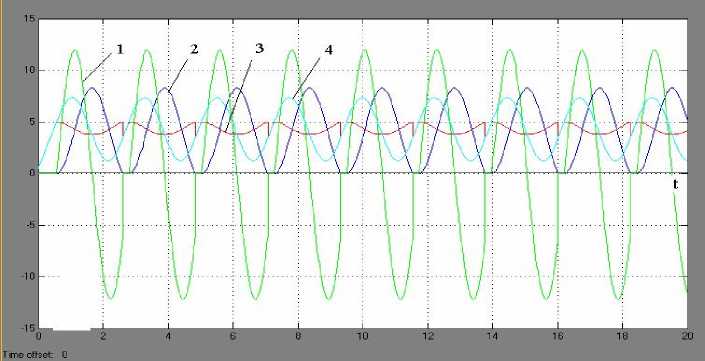
Рис. 9. Результаты моделирования фрикционных автоколебаний (копия экрана «Scope»): 1 – ускорение; 2 – скорость; 3 – сила сухого некулонова трения; 4–упругая сила пружины
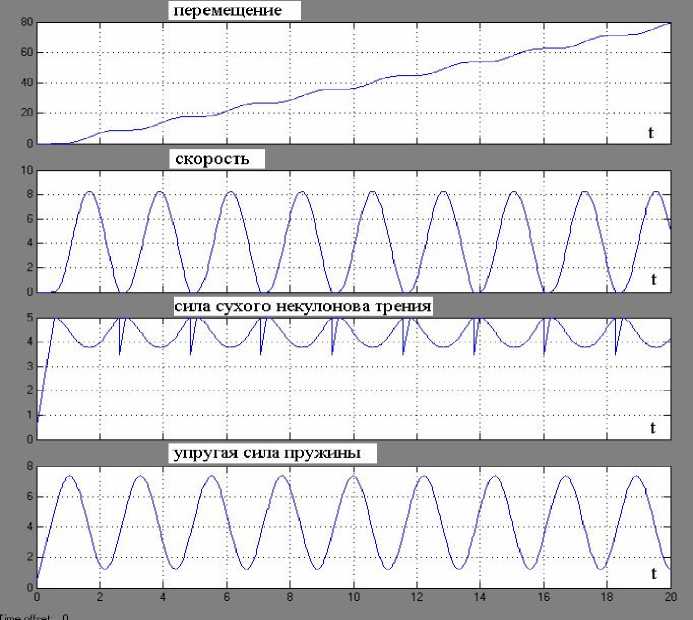
Рис. 10. Результаты моделирования фрикционных автоколебаний (копия экрана «Scope 1»)
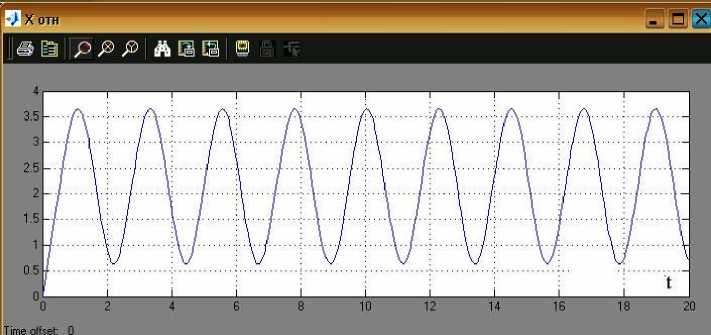
Рис. 11. График изменения относительного перемещения груза и правого конца упругого элемента
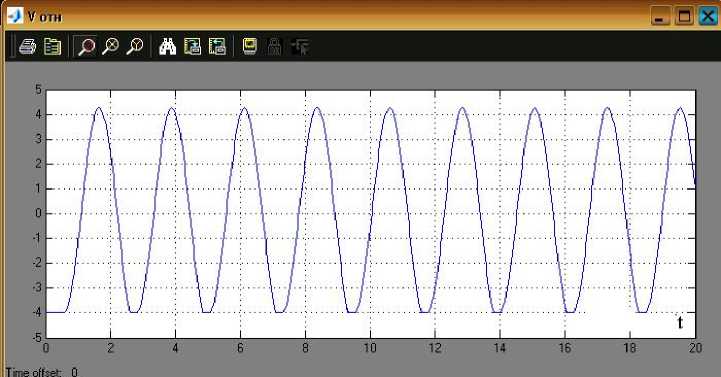
Рис. 12. График изменения относительной скорости груза и правого конца упругого элемента
На рис. 9 и 10 представлены результаты моделирования рассматриваемой системы в среде Simulink/MatLAB. Из анализа приведенных графиков видно, что груз М совершает квази-гармонические фрикционные автоколебания с частотой f =0,44 Гц, сопровождаемые периодическими остановками продолжительностью t ост =0,2 с. Амплитудные значения скорости груза превышают 8 м/с. Сила сухого некулонова трения имеет сложный закон изменения во времени, обусловленный падающим участком и прерывистым характером движения с остановками. На рис. 11 и 12 показаны графики относительного смещения и относительной скорости груза и правого конца упругого элемента, перемещаемого с постоянной скоростью. При этом хорошо заметны остановки груза, а также квази-гармонический характер движения.
Таким образом, известный характер поведения рассматриваемой системы полностью подтвердился при компьютерном вычислительном эксперименте.
Выводы: рассмотренная компьютерная модель сухого некулонова трения, представленная средствами блочного имитационного моделирования Simulink/MatLab, позволяет адекватно описывать динамические процессы, в частности, фрикционные автоколебания. Особо важным и сложным при моделировании является обеспечение соответствующего характера изменения силы сухого некулонова трения на этапах скольжения и относительного покоя поверхностей трения, а также определение момента смены одного этапа другим.
Работа выполнена в рамках реализации Федеральной целевой программы «Научные и научнопедагогические кадры инновационной России» на 2009-2013 годы по проблеме «Исследование закономерностей движения и идентификация динамических параметров механических систем с сухим неку-лоновым трением» (гос. регистр. № П2243, шифр НК 422П).
Список литературы Компьютерное моделирование динамики элемента сухого некулонова трения
- Вейц, В.Л. Основы динамики и прочности машин/В.Л. Вейц. -Ленингр. гос. универ, 1978. -230 с.
- Геккер, Ф.Р. Динамика машин, работающих без смазочных материалов в узлах трения/Ф.Р. Геккер. -М.: Машиностроение, 1983. -167 с.
- Кариус, Д. О влиянии кусочно-линейного и постоянного трения на вынужденные периодические колебания/Д. Кариус//Труды Американского общества инженеров механиков. Конструирование и технология машиностроения. -1985. -№4. -С. 28-43.
- Пановко, Г.Я. Вибрационные транспортно-технологические процессы в системах с разрывным некулоновым трением/Г.Я. Пановко. Автореферат диссертации на соискание учёной степени доктора технических наук. -Рига, 1988. -32 с.
- Цыфанский, С.Л. Нелинейная вибродиагностика машин и механизмов/С.Л. Цыфанский, В.И. Бересневич, Б.В. Лушников. -Рига: изд-во Рижского техн. ун-та, 2008. -366 с.
- Черных, И.В. SIMULINK: среда создания инженерных приложений/Под общ. ред. В.Г. Потемкина. -М.: ДИАЛОГ-МИФИ, 2003. -496 с.
