Комплекс программ по моделированию работы автомобильной дороги: модули трасса и колонна

Автор: Скрыпников А.В., Кондрашова Е.В., Дорохин С.В., Чистяков А.Г.
Журнал: Вестник Воронежского государственного университета инженерных технологий @vestnik-vsuet
Рубрика: Информационные технологии, моделирование и управление
Статья в выпуске: 3 (61), 2014 года.
Бесплатный доступ
Сложность процесса функционирования дороги, вызванная непрерывно меняющимися от пикета к пикету дорожными условиями, обусловленными множеством параметров проектируемой (существующей дороги), многообразием типов автомобилей, их технико-экономическими параметрами, многообразие климатических и погодных условий потребовала разработать целый комплекс программ моделирования. В статье описан комплекс программ, образующих ядро подсистемы «водитель-автомобиль-дорога-среда». Оптимизации проектных решений способствуют разработанные модули типа ТРАССА и КОЛОННА, использующие не усреднённые показателями транспортно-эксплуатационных характеристик дороги, а детально моделируют процесс функционирования дороги. Модуль ТРАССА обеспечивает моделирование восприятия непрерывной последовательности элементов дороги механической подсистемой «дорога-автомобиль» (путём непрерывного формирования и решения уравнений движения и характеристик этого режима). Модуль ТРАССА (совместно с модулем ПАРК) позволяет снять техническое противоречие между 20-летним сроком проектирования дороги и существующей практикой использования в обоснованиях проектных решений технических параметров автомобилей сегодняшнего дня. Сложность процесса функционирования дороги, обусловленная случайным характером дорожного движения, потребовала включения в систему автоматизированного проектирования автомобильных дорог модуля КОЛОННА. Модуль КОЛОННА позволяет получать результаты моделирования этого случайного процесса, достаточные для оптимизации проектных решений в целом и на участках местной вариации плана, продольного профиля, обстановки пути и т.п. Многообразие дорожных условий удаётся классифицировать по особенностям формирования режимов движения потока. При этом использованы результаты исследования процесса движения автомобилей в потоке.
Моделирование, скорость, автомобильная дорога, комплекс программ, оптимизация решения, алгоритм, дорожные условия, режим движения
Короткий адрес: https://sciup.org/14040292
IDR: 14040292 | УДК: 630.383
Complex programs for modeling highway: way and stream
The complexity of the operation of the road caused by continuously varying from picket to picket road conditions caused by a variety of parameters projected (existing road), the variety of types of cars, their technical and economic parameters, a variety of climatic and weather conditions required to develop a complex simulation programs. This paper describes a set of programs that form the core of the subsystem "driver-vehicle-road environment". Optimization of the design solutions developed modules contribute WAY type and columns, not using indicators averaged transport - road performance, and detailed process model of functioning of the road. WAY module provides continuous sequence modeling perception of road elements mechanical subsystem "road-car " (by continuous formation and solution of the equations of motion and the characteristics of this mode). WAY module (with module PARK ) brings the technical contradiction between the 20-year term of road design and use of existing practices in their justification of design decisions technical parameters of cars today. The complexity of the operation of the road due to the random nature of traffic demanded inclusion in the computer-aided design of roads STREAM module. STREAM module allows to obtain simulation results of a random process, sufficient to optimize the design decisions in general and in the areas of local variation of the plan, longitudinal section, the way the situation, etc. Variety of road conditions possible to classify on the specifics of the formation of the flow regimes. This builds on the results of study of the process of movement of cars in the stream.
Текст научной статьи Комплекс программ по моделированию работы автомобильной дороги: модули трасса и колонна
Дорохин С.В., Чистяков А.Г., 2014
Увязывая многообразие проектных решений отдельных частей дороги, проектировщик должен видеть всю дорогу «в целом», оценивать как можно полнее транспортноэксплуатационные показатели выбираемого проектного решения. В этой связи основное назначение системы автоматизированного проектирования (САПР) - давать проектировщику возможность анализировать и синтезировать конструкцию дороги в режиме диалога с ЭВМ. Основной частью САПР должна быть имитационная система, позволяющая видеть дорогу в действии. Моделирование дорожного движения такой системой - это испытание конструкций дороги на ЭВМ [1-3].
Процесс функционирования дороги имитируется двумя модулями: ТРАССА и КОЛОННА, образующими две подсистемы испытания в ЭВМ конструкций дороги.
При небольшом уровне загрузки дорог, не более 0,1-0,2, оптимизация проектных решений может быть обеспечена показателями свободного движения, то есть моделированием взаимодействия подсистемы дорожная среда -дорога - водитель - автомобиль и в значительной степени моделированием работы автомобилей и двигателей [4].
Поэтому оптимизация проектных решений дорог V-III и частично II технических категорий может достигаться по результатам работы модуля ТРАССА.
При большом уровне загрузки оптимизация только по результатам модуля ТРАССА может быть неполной. Это обстоятельство, а также необходимость сравнения характеристик свободного движения и движения автомобилей в потоке требуют выполнения следующего шага моделирования - запуска модулей КОЛОННА, для которой результаты модуля ТРАССА (а также модулей ПРОФИЛЬ и СОСТАВ) являются исходными. При разработке алгоритма модуля ТРАССА использованы результаты исследований. При этом обращено внимание на следующие трудности.
Во-первых, моделирование затрудняет непрерывно меняющееся от пикета к пикету многообразие дорожных условий. Элементы дорожных условий воспринимаются как автомобилем - механической подсистемой, так и водителем, принимающим решения о режиме движения. Процесс взаимодействия автомобиля и дороги смоделирован дифференциальными уравнениями движения автомобиля. Процесс восприятия водителем дорожных условий моделируется подпрограммой, имитирующей выбор водителем режима движения, скорости, номера передачи, степени дросселирования или торможения в зависимости от дорожных условий на данном пикете и от характеристик движения на предыдущем участке. Как и всякая подсистема общей системы имитации процесса функционирования дороги, подсистема выбора водителем режима движения открыта для совершенствования [3, 5].
Во-вторых, велико разнообразие типов автомобилей, состав потоков существенно меняется в зависимости от развитости производительных сил района тяготения, ощутимы колебания коэффициентов использования грузоподъёмности и пробега, некоторые географические факторы существенно влияют на технико-экономические параметры автомобилей. Единая основа моделирования современных и перспективных моделей автомобилей и реализованный в программе ПАРК принцип непрерывного обновления в нормативно - справочной базе технико-экономических параметров практически всего автомобильного парка, позволяет существенно повысить точность и достоверность результатов моделирования.
В-третьих, многообразно ограничение скорости дорожными условиями (кривизна пути, наличие или отсутствие виража, расстояние видимости проезжей части, пониженная шероховатость проезжей части, пересечения и примыкания в одном уровне, заниженный габарит проезжей части мостов и путепроводов, несовершенное благоустройство населённых пунктов и т.п.). Это приводит к необходимости обобщать ряд известных зависимостей скорости от параметра соответствующего элемента дорожного сооружения и разрабатывать комплекс подпрограмм анализа показателей движения с учётом влияния одновременно действующих элементов дорожных условий и соответствующим образом корректировать режим работы двигателя и режим движения автомобиля.
Такой комплексный анализ на каждом пикете режимов движения обеспечивает высокий уровень оптимизации проектного решения именно за счёт имитации функционирования какого-либо элемента дорожного сооружения в реальном, присущем данной дороге комплексе остальных дорожных условий.
В-четвёртых, такие показатели, служащие критериями оптимизации, как расход топлива, эмиссия веществ, себестоимость перевозок, коэффициенты безопасности движения и др. должны рассчитываться именно как результат имитации проезда автомобилями рас- чётного потока всего участка дороги с учётом режимов движения, сложившихся на предыдущих участках, режима, выбираемого водителем на данном пикете. Эта трудность преодолена алгоритмом последовательного решения от пи -кета к пикету дифференциальных уравнений, связывающих характеристики движения автомобиля с дорожными условиями [1-3].
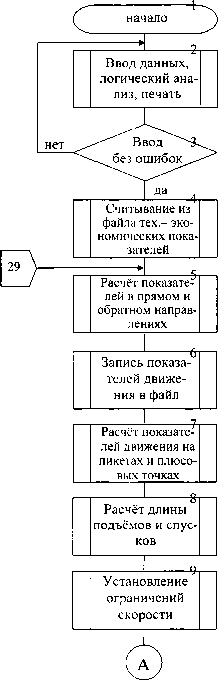
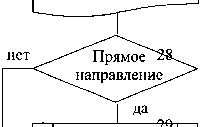
Для работы модуля ТРАССА (см. блок-схему на рисунках 1 и 2) вводят данные, подготовленные ранее модулями ПРОФИЛЬ и СОСТАВ, и записанные в рабочий файл.

44-Расчёт показателей на плюсовых точках
-------------!---------14-
Установление режима движе-
Установление степени открытия дросселя
|
Расчёт скорости и выбор номера передачи |
|
Расчёт начальной скорости |
|
Уточнение скорости с учётом ограничений |
Рисунок 1. Блок-схема модуля ТРАССА (начало)
Данные о геометрии пути, подготовленные программой ПРОФИЛЬ: средние значения уклонов коротких отрезков (длиной 20, 25, 50 м), которыми аппроксимирован продольный профиль; средние значения уклонов пикетов; по-пикетные расстояния видимости поверхности дороги (прямо и обратно); параметры кривых плана (попикетное положение, радиусы, уклоны виража, углы поворота) [1, 3].
Также вводятся технико-экономические параметры типовых автомобилей (6 типов грузовых, 4 типа автобусов, 3 типа легковых), выбранные модулем СОСТАВ из нормативносправочной базы, созданной модулем ПАРК:
полный вес, грузоподъёмность, относительный сцепной вес гружёного и порожнего автомобилей, радиус качения колеса, фактор сопротивления воздуха, КПД трансмиссии, КПД эксплуатационного состояния двигателя, объём двигателя, мощность двигателя, частота двигателя при максимальной мощности, частота двигателя на холостом ходу, минимальный расход топлива, передаточное число главной передачи, передаточные числа коробки перемены передач, вместимость (пассажиров), стоимость автомобиля, стоимость топлива, амортизационные отчисления на восстановление и капитальные ремонты, затраты на ремонты и обслуживание автомобилей, затраты на восстановление и ремонт шин, зарплата водителей и постоянные расходы, коэффициенты использования грузоподъёмности пробега [5].

47т Расчёт скорости
--35—
Вывод эпюр скорости и коэффициентов безопасности,____
--
Расчёт расхода топлива
-----^
Расчёт показателей токсичности
-----------1--------201
Корректировка скорости с учётом обстановки
---------!-----24- Вывод эпюры максимальной скорости
Расчёт состав- х ляющих себестоимости перевозок
-л-------4--20-
Контрольныи попи-кетный вывод себестоимости
Расчёт коэффициентов безопасности
Рисунок 2. Блок-схема (Окончание)
Вывод показателей движения автомобилей
--------1----27—
Таблицы показателей движения
Преобразование данных для моделирования в обратном напр-ии

1—эе— Таблицы показателей по обоим направле-
модуля ТРАССА
Данные о проезжей части: ширина полосы движения, ширина обочины, ровность покрытия на подъёмах и спусках, тип покрытия и его состояние (сухое, мокрое загрязнённое и т.п.).
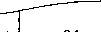
Рисунок 3. Блок-схема модуля КОЛОННА (начало)
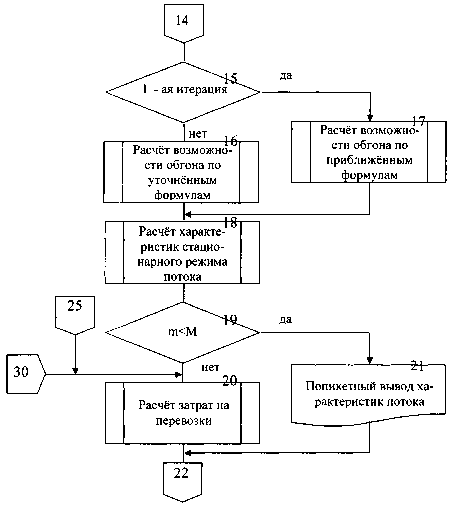
Рисунок 4. Блок-схема модуля КОЛОННА (продолжение)
Данные об обстановке пути: количество элементов дорожной обстановки (переездов, пересечений, примыканий в одном уровне, мостов и путепроводов, населённых пунктов и т.п.); ха- рактеристики элементов дорожной обстановки (охраняемый или неохраняемый переезд, оборудованное или необорудованное пересечение, габариты мостов, элементы скорости дорожными знаками и т.п.); попикетное расположение начала и конца элемента дорожной обстановки.
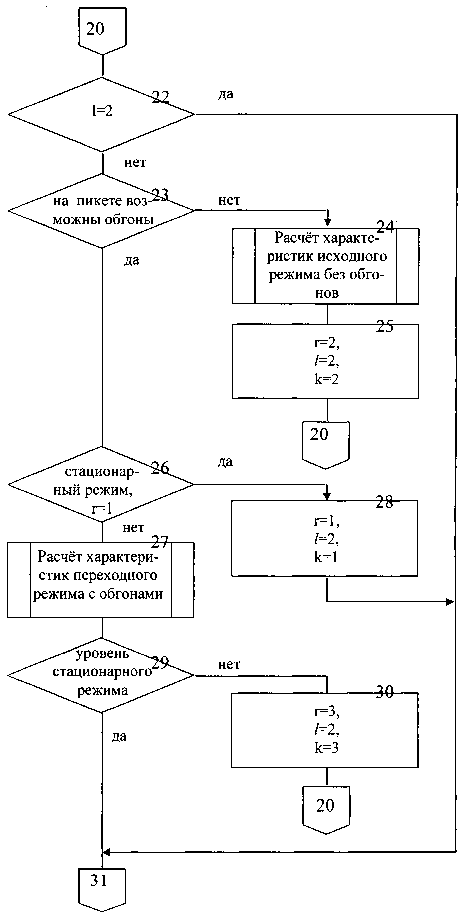
Рисунок 5. Блок-схема модуля КОЛОННА
(продолжение)
Результаты моделирования могут быть выведены в различном объёме в зависимости от управляющих параметров режима ввода.
Средние показатели для каждого направления: средневзвешенные скорость и время движения, приведённая токсичность (кг СО), расход топлива.
Средние показатели каждого типового автомобиля по обоим направлениям движения: средняя скорость, время движения, расход топлива, приведённая токсичность.
Затраты на движение для каждого типового автомобиля по шинам, по топливу, по ремонтам и амортизации, по заработной плате водителя, постоянные расходы, потери от ДТП, денежная оценка пребывания пассажиров в пути, общая себестоимость перевозок.
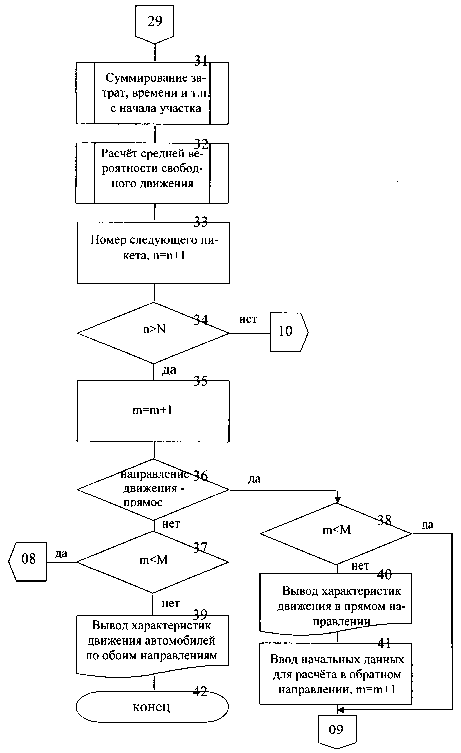
Рисунок 6. Блок-схема модуля КОЛОННА
(окончание)
Показатели движения автомобиля: скорость и время движения без груза и с грузом.
Таблицы попикетных показателей, необходимых для анализа локальных вариантов проектных решений: значений уклонов, средних скоростей основных типов автомобилей, средних значений себестоимости перевозок, средневзвешенных скоростей, расходов топлива типовыми автомобилями, дисперсий скорости типовых автомобилей.
Попикетные показатели, средневзвешенные по типам автомобилей: обобщённая токсичность, обобщённая токсичность с начала участка. Попикетные показатели для каждого типового автомобиля: для гружёных автомобилей: скорость, расход топлива, номер использу емой водителем передачи; то же для порожних; обобщенная токсичность; эмиссия токсичных веществ (окись углерода, углеводороды, окислы азота, сажа); составляющие себестоимости перевозок в целом и по видам затрат [1, 3].
Результаты моделирования вводятся программой ТРАССА, представляющие самостоятельный интерес. Результаты, необходимые для моделирования движения автомобильного потока программой КОЛОННА, записываются в рабочий файл.
Модуль КОЛОННА. Оптимизация проектных решений по комплексу показателей требует оценки по их результатам моделирования процесса функционирования дороги при пропуске автомобильных потоков расчётного состава и интенсивности.
Основное внимание обращено на следующие особенности этой части имитационной подсистемы как составной части САПР автомобильных дорог (АД).
Во-первых, комплекс показателей имитируемого процесса функционирования дороги должен отражать все варианты параметров дороги при поисках оптимального проектного решения. Это может быть достигнуто только детальным представлением в исходных данных параметров проектных решений и использованием в качестве данных для модуля КОЛОННА результатов работы модулей ПРОФИЛЬ и ТРАССА.
Во-вторых, непрерывное изменение от пикета к пикету проектируемых характеристик дороги создает по каждому варианту последовательность дорожных условий, формирующих режимы движения, присущие только данному участку дороги, данному варианту.
Введение классификации, разделяющей дорожные условия на три типа в зависимости от режима движения потока автомобилей позволяет разработать единый алгоритм моделирования движения потока при любом сочетании элементов дороги и обстановки пути.
В-третьих, это особенно важно для двухполосных дорог (II, III, IV категорий), полная оценка проектного решения требует совместного моделирования движения потоков прямого и встречного направлений. Улучшение показателей потока прямого направления соответствующим проектированием дорожных условий может ухудшить показатели встречного потока. В процессе движения происходит непрерывное взаимодействие потоков, причём результаты такого взаимодействия проявляются и на прилегающих участках дороги. Чтобы оценить условия движения, допустим, на 10-м пикете, нужно знать показатели движения потока прямого направления на 9, 8, 7 и т.д. пикетах и показатели движения встречного потока на 10 пикете, нужно знать показатели его движения на 11, 12, 13 и т.д. пикетах и показатели движения прямого потока на 10 пикете. Получается замкнутый круг, который разрешён в программе КОЛОННА соответствующим алгоритмом итерационного моделирования, позволяющим за 2-3 итерации быстро достичь установившихся (по итерациям) характеристик обоих потоков. Каждая итерация заключается в «прогонке» программ моделирования по участку дороги в прямом и обратном направлениях. При каждой итерации уточняются характеристики режимов движения на каждом пикете прямого направления, которые служат данными для моделирования обратного направления движения. При первой «прогонке» характеристики встречного потока (движение встречного потока ещё не моделировалось) вычисляют по эмпирическим формулам.
В-четвёртых, поскольку движение автомобилей является случайным процессом, показатели этого движения как в целом по участку дороги и, что особенно важно для оптимизации проектных решений, попикетные показатели должны быть получены как результат моделирования случайного процесса. Поэтому в алгоритме программы КОЛОННА (рисунки 1 -2) решены следующие задачи: моделирование по-пикетного распределения скорости свободного движения типовых автомобилей (по результатам попикетного расчёта параметров распределения: скорости и дисперсии - программой ТРАССА); установление режима движения потока на каждом пикете в соответствии с дорожными условиями (стационарный, переходные); расчёт функций распределения скорости типовых автомобилей в потоке на каждом пикете (необходимые для этого моделирования распределения интервалов, расчёт возможности обгона, вероятности свободного движения и т.д.); расчёт показателей движения автомобилей в потоке, необходимых для оценки проектного решения (скорости автомобилей типовых групп, коэффициент безопасности, составляющих себестоимости перевозок, расхода топлива, эмиссии токсичных веществ и т.п.).
Данными для модуля КОЛОННА служат результаты работы модулей ПРОФИЛЬ, СОСТАВ, ТРАССА, находящиеся в рабочем файле и данные, необходимые для техникоэкономических расчётов.
Данные программы ТРАССА: попикет-ные значения средних значений свободного движения и дисперсии скорости, расхода топлива, эмиссии токсичных веществ, основных типовых автомобилей; попикетные значения классификации дорожных условий по возможности обгона; данные о проезжей части и об обстановке пути, аналогичные данным для программы ТРАССА.
Данные для технико-экономических расчётов: интенсивность потоков в расчётном (для технико-экономических обоснований) году; календарный и расчётный годы.
Результаты работы программы КОЛОННА выводятся в различном виде в зависимости от управляющих параметров режима ввода.
Средние значения для каждого направления: скорости и времени движения, расхода топлива, эмиссии токсичных веществ, приведённых к СО; сводка затрат на перевозки в целом и по видам затрат в сутки и в расчётном году для каждого направления.
Эпюры скорости основных типов автомобилей в потоке, совмещённые с коэффициентом безопасности. Средние значения для каждого направления и для каждого типового автомобиля: скорости, времени движения, расхода топлива, эмиссии токсичных веществ, затрат на перевозки в целом и по видам затрат.
Попикетные значения для каждого типового автомобиля: скорости, расхода топлива, себестоимости перевозок в целом и по видам затрат, эмиссии токсичных веществ; распределение скорости свободного движения; распределение скорости движения автомобиля в потоке. Попикетные значения в среднем для потока: распределение скорости свободного движения; распределение скорости автомобилей в потоке; распределение интервалов между автомобилями; вероятности обгонов; тип режима движения потока; плотность потока и его средняя скорость.
Можно сделать следующий вывод. Оптимизация проектных решений не может быть обеспечена усреднёнными показателями транспортно-эксплуатационных характеристик и требует разработки алгоритмов и программ детального моделирования процесса функционирования дороги - модулей типа ТРАССА и КОЛОННА. Программы типа ТРАССА обеспечивают моделирование восприятия непрерывной последовательности элементов дороги механической подсистемой «дорога-автомобиль» (путём непрерывного формирования и решения уравнений движения и харак- теристик этого режима). Модуль ТРАССА (совместно с модулем ПАРК) позволяет снять техническое противоречие между 20-летним сроком проектирования дороги и существующей практикой использования в обоснованиях проектных решений технических параметров автомобилей сегодняшнего дня.
Сложность процесса функционирования дороги, обусловленная случайным характером дорожного движения, требует включения в САПР АД программы КОЛОННА. Модуль КОЛОННА позволяет получать результаты
