Комплексирование передачи команд и дальномерных измерений

Автор: Вильданов Айдар Ильгизович, Евстратько Владислав Владимирович, Мишуров Андрей Валерьевич, Панько Сергей Петрович, Рябушкин Станислав Анатольевич
Журнал: Космические аппараты и технологии.
Рубрика: Космонавтика
Статья в выпуске: 4 (14), 2015 года.
Бесплатный доступ
Представлен принцип объединения дальномерных измерений не только по дальномерному, но и по командному сигналу, что повышает точность измерения.
Измерение дальности, усреднение результатов измерений, передача команд
Короткий адрес: https://sciup.org/14117360
IDR: 14117360 | УДК: 629.7.051
The aggregation command and the rangefindertion measurements
Presents the principle of combining the range measurements not only on distance but also on command signal that increases the accuracy of measurement.
Текст научной статьи Комплексирование передачи команд и дальномерных измерений
Использование общего командно-дальномерного тракта, обеспечивающее экономию частотного ресурса, приводит к необходимости раздельной передачи по времени. В [1] это обеспечивается с помощью мультиплексора, управляемого оператором НКУ, либо автоматически с приоритетом командных сигналов в соответствии со входной частью командной радиолинии на рис. 1.
Один из сигналов на входе мульти сора/кодера, например, si - команда, другой – s2 – дальномерная последовательность. Отсюда следует, что команды и дальномерная последовательность передаются не одновременно и, совершенно понятно, что командные последовательности имеют высший приоритет.

Рис. 1. Формирователь передаваемого сигнала
А. И. Вильданов, В. В. Евстратько, А. В. Мишуров, С. П. Панько, С. А. Рябушкин
Комплексирование передачи команд и дальномерных измерений
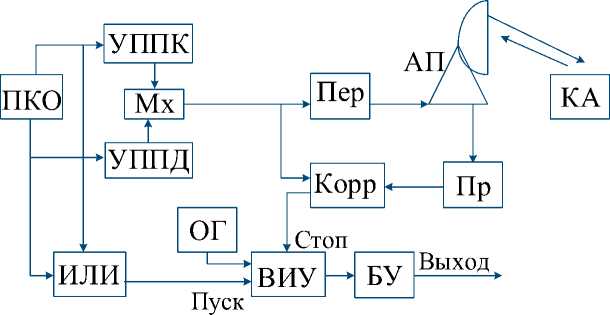
Рис. 2. Комплексированный измеритель дальности КА
Поэтому измерение дальности прерывается во время передачи командных сигналов. Ниже этот недостаток устраняется на основе структурной схемы по рис. 2. Техническая сущность состоит в том, что дальность КА измеряется не только по дальномерной последовательности, но и по командной последовательности, т.е. без перерывов, вызванной посылкой команды.
С персонального компьютера оператора ПКО в автоматическом или ручном режиме подаётся импульс на чтение команд на узел постоянной памяти команд УППК. Командная последовательность в форме битового сигнала поступает на передатчик Пер через мультиплексор Мх и в виде последовательности радиоимпульсов на несущей частоте радиолинии «вверх» через антенный пост АП передаётся на КА. Принятая и идентифицированная командная последовательность на борту КА направляется на исполнение узлами и подсистемами КА. По линии «вниз» с КА направляется квитанция об этом событии. На практике возможны два варианта квитанции – заранее оговоренное сообщение, которое может быть частью команды, или команда полностью. Это закладывается при конструировании КА.
На время отсутствия команд с ПКО регулярно поступает импульс на чтение дальномерной последовательности из узла постоянной памяти дальномерных последовательностей УППД, которая излучается в сторону КА через АП. Поэтому на КА последовательно излучается либо команда, либо дальномерная последовательность.
Принятая на борту КА дальномерная последовательность ретранслируется по радиолинии «вниз». Коррелятор со схемой управле- ния Корр сопоставляет принятую и местную последовательности, поступающую с выхода Мх. Схема управления Корр обеспечивает поиск максимума корреляционной функции, который достигается в момент совпадения излучаемой и принятой последовательностей. Импульсом с выхода элемента ИЛИ запускается времяизмерительный узел ВИУ каждый раз при запуске команды или дальномерной последовательности. Импульсом «Стоп» с выхода Корр работа ВИУ прекращается. Измерение длительности интервала времени между импульсами «Пуск» и «Стоп», которая пропорциональна дальности КА, производится путем подсчета количества импульсов опорного генератора ОГ Поскольку информационный поток на КА не прерывается, то с выхода ВИУ регулярно поступают цифровые эквиваленты длительности измеряемого интервала времени. Результаты частных измерений усредняются в узле усреднения БУ.
Эффективность предложенного технического решения можно показать следующим путем. Обозначим результат измерения длительности интервала времени хизм = хи + ^ i.
Здесь индекс «и» обозначает истинное значение длительности интервала времени; Δ i – погрешность измерения истинного значения в i -м такте. Наиболее существенно искажение, вызванное шумом в тракте принимаемого сигнала.
Если команды отправляются достаточно часто, что характерно для режима неориентированного полета КА, то дальность измеряется прерывисто. Погрешность одиночного из-
■_■ ИССЛЕДОВАНИЯ
Havko-
ЖГРАДА
№ 4 (14) октябрь-декабрь 2015
мерения обозначим Δ i . Поскольку измерения по описанной методике производятся непрерывно как по командным, так и по дальномерным сигналам, то возможно эффективное усреднение результатов k измерений, i ∈ (1 …k ), производимое в блоке усреднения БУ. Считая отдельные Δ i некоррелированными, получим
1k1k хи =— XL+u +— У А,- = хи + А.
ии iи k i=1 k i=1
Здесь А - среднее значение погрешности при к измерениях и х и = х и .. Это выражение опирается на известное положение теории вероятностей M [ a + b ] = M [ a ] + M [ b ], M – символ математического ожидания. Широко известно [2], что
D р = 1 ° вх . k
Здесь D p - дисперсия усредненного результата измерений, а D вх - дисперсия A i . При достаточно больших k дисперсия результирующей погрешности стремится к нулю: D p ^ 0. Это позволяет существенно уменьшить случайную составляющую погрешности измерения дальности КА, вызванную шумом. Иначе дело обстоит, когда необходима неоднократная передача команд. При этом эффективность усреднения существенно уменьшается.
Наибольшая эффективность рассмотренного подхода к измерению дальности достигается при кодировании команд псевдослучайной последовательностью с разрядностью, равной разрядности дальномерной ПСП.
Список литературы Комплексирование передачи команд и дальномерных измерений
- Harles G. Ranging system and method for satellites. US Patent 6864838. March, 8, 2005.
- Вентцель Е. С. Теория вероятностей. М.: Высш. шк., 1999.
