Концепция окололунной навигации

Автор: Чеботарев В.Е., Кудымов В.И., Звонарь В.Д., Внуков А.А., Владимиров А.В.
Журнал: Космические аппараты и технологии.
Рубрика: Космонавтика
Статья в выпуске: 4 (10), 2014 года.
Бесплатный доступ
Формулируются требования к информационно-навигационному обеспечению различного класса потребителей на поверхности Луны и в окололунном космическом пространстве. Рассматриваются принципы спутниковой навигации и соответствующие орбитальные структуры. Определяется частотный план для окололунной навигации и связи. Решается задача интеграции функций навигации и связи на уровне потребительской аппаратуры и спутника.
Окололунная навигация и связь, базовая лунная станция, навигационно-связной спутник луны
Короткий адрес: https://sciup.org/14117330
IDR: 14117330 | УДК: 527:
Circumlunar navigation
We formulatedthe requirement to customer-tailored navigationon lunar surface andcircumlunar space. In the article we have consideredthe principles of satellitenavigation and corresponding on-orbitstructures. We have talked the problem ofnavigation-tocommunication at the user unit and a satellite.
Текст научной статьи Концепция окололунной навигации
Решение задачи промышленного освоения Луны обусловливает упреждающее развитие средств обеспечения связью и навигацией мобильных транспортных средств на поверхности Луны, а также космических средств в окололунном космическом пространстве, то есть создание на постоянной основе лунной информационно-навигационной обеспечивающей системы (ЛИНОС) длительного функционирования.
В ранее представленных авторских статьях рассмотрены вопросы обеспечения связью окололунных потребителей, предложены типы орбитальных группировок, рассмотрены вопросы упреждающего создания сети се-
ленодезических пунктов, расчет радиолиний «Земля–Луна» и требования по размещению базовой лунной станции связи на поверхности Луны [5]. В настоящей статье основное внимание уделено вопросам навигационного обеспечения и интеграции в ЛИНОС функций навигации и связи.
-
1. Формирование требований к информационнонавигационному обеспечению Спутниковые системы информационнонавигационного обеспечения потребителей в зоне Луны предназначены для создания необходимых условий эффективного изучения и освоения Луны в части телекоммуникационного и навигационного обеспечения процессов управления полетом лунных автоматиче-
- ских аппаратов и пилотируемых экспедиционных комплексов, координатно-временной привязки результатов космических исследований и экспериментов, координатно-временного и информационного обеспечения функционирования членов экспедиций и персонала постоянно действующих баз на поверхности Луны [4–6].
Зона информационно-навигационного обеспечения разделяется на две существенно различные области размещения потребителей: окололунное космическое пространство и поверхность Луны.
Окололунное космическое пространство охватывает сферическую область с радиусом от центра Луны до 20 000 км, в которую попадают:
-
- космические потребители, осуществляющие орбитальные маневры на подлетных траекториях для попадания в заданный район поверхности Луны или перевода на окололунную орбиту;
-
- космические потребители, осуществляющие пассивный полет по окололунным орбитам;
-
- космические потребители, проводящие орбитальные маневры для перехода на другую орбиту, для попадания в заданный район поверхности Луны или для обеспечения отлета от Луны.
Информационно-навигационное обеспечение космических потребителей проводится на участках пассивного полета по орбите, охватывающих зоны выдачи импульса для орбитального маневра. Чем длительнее участок навигационных измерений, тем точнее корректируется орбита и прогнозируются конечные параметры точки встречи с поверхностью Луны.
Работа с космическими потребителями по навигационному обслуживанию может быть заранее спланирована и, учитывая их малочисленность, разнесена во времени. Требования к точности навигационно-временного обеспечения не могут быть высокими из-за больших погрешностей реализации корректирующего импульса и ограничены следующими диапазонами: 100 м, 1 м/с, 1 мкс.
На поверхности Луны потребителями, нуждающимися в информационно-навигационном обеспечении, являются мобильные транспортные средства, используемые для доставки научной аппаратуры, экипажа, вспомогательных систем и средств в заданный район
(точку) на поверхности Луны (мобильные потребители). Работа по навигационному обслуживанию может быть заранее спланирована.
Требования к точности навигационновременного обеспечения не могут быть высокими из-за малой динамики перемещения и ограничены следующими диапазонами: 10 м (в плане), 0,5 м/с, 0,1 мкс, а длительность сеансов навигации не более 0,2 ч с периодичностью 1–2 ч.
При проведении научных экспедиций на поверхности Луны может быть востребована 15 высокоточная апостериорная координатная привязка результатов космических научных исследований и экспериментов в выбранной навигационной точке (не хуже 1 м) с организацией плановых и достаточно длительных сеансов измерений навигационных параметров (стационарные потребители).
На основании изложенного сформулируем основополагающие требования к информационно-навигационному обеспечению:
-
- непрерывная по времени доступность на любом из участков полета и во всем регионе ожидаемых перемещений персонала лунных баз;
-
- программное обслуживание ограниченного контингента потребителей;
-
- координатно-временная привязка лунных космических, мобильных и стационарных потребителей на уровне, достигнутом земными космическими навигационными системами.
-
2. Исследование и выбор метода спутниковой навигации
Спутниковая радионавигация для наземных потребителей использует совокупность наземных и космических средств, образующих космическую навигационную систему (КНС) и реализующих пассивный метод навигации [1-3]. В основе пассивной спутниковой радионавигации лежит излучение с НКА высокостабильного навигационного радиосигнала, используемого потребителем для навигационных измерений, получения навигационной информации о параметрах движения НКА на каждый момент измерения (эфемеридах) и оцифрованной шкалы спутникового времени. Таким образом, потребители работают только на прием, то есть пассивно , что позволяет СНРС обслуживать их неограниченное число. Полученные результаты измерений вместе с принятой с
Havko-
ЖГРАДА
НКА навигационной информацией позволяют вычислить параметры движения на борту самого потребителя (самоопределение). Для реализации пассивного метода навигации НАП потребителя должна состоять из приемоизмерительного блока, стандарта частоты и времени, а также ЦВМ для обработки измерений и вычисления навигационных параметров: координат, скорости, времени.
Пассивный метод навигации , использующий радиально-скоростные измерения дальности (доплеровский метод), обеспечивает по одному прохождению КА в зоне радиовидимости измерения доплеровского приращения частоты, прием эфемеридно-временной информации и шкалы времени спутника с последующим вычислением поправки к широте и долготе, а также поправки времени. Периодичность и точность навигационных определений зависят от количества КА в орбитальной группировке (ОГ), типа используемых орбит. Желательно использовать приполярные, круговые орбиты с достаточно малой высотой (для увеличения доплеровского приращения частоты).
Пассивный метод навигации , использующий беззапросный дальномерный (разностно-дальномерный) метод измерения дальности, позволяет практически в реальном масштабе времени определить полный вектор состояния потребителя, включающего в себя три пространственных координаты, три составляющих скорости и поправку времени, если ОГ обеспечивает одновременную видимость потребителем не менее 4 КА.
Если использовать запросный дальномерный метод измерения дальности (активная спутниковая радионавигация), то ОГ должна обеспечивать одновременную видимость потребителем минимум 3 НКА [1; 3]. В запросном дальномерном методе НКА выступает как источник или ретранслятор навигационных сигналов, посылаемых из единого Центра, что обеспечивает синхронизацию ответных сигналов потребителей. Для этого потребителя необходимо оснастить приемо-ответчиком, который ретранслирует запросные сигналы и имеет возможность получать вычисленные Центром данные о собственном местоположении.
Для малочисленных окололунных потребителей предпочтительно применять активную навигацию по следующим причинам:
-
- уменьшается требуемое для непрерывной навигации количество НКА в ОГ (дальномерный метод);
-
- получаемые координаты потребителя одновременно используются как самим потребителем, так и Центром (решается задача диспетчирования и управления движением);
-
- аппаратура потребителя решает простую задачу ретрансляции запросных сигналов и информационного обмена (прием вычисленных центром данных о собственном местоположении), то есть выполняет функции связного терминала.
-
3. Обоснование архитектуры орбитальной группировки
Возможность реализации окололунной спутниковой навигации в значительной степени зависит от устойчивости окололунных орбитальных группировок. Гравитационное поле Луны в отличие от земного имеет менее регулярную структуру, обусловленную наличием у поверхности Луны больших локальных аномалий (масконы), а по мере удаления от поверхности Луны все более существенное влияние на конфигурацию поля оказывают возмущения Земли (в первую очередь), Солнца, планет [6].
Проведенные исследования эволюции орбит лунных КА выявили, что для навигации и связи на поверхности Луны пригодны почти круговые наклонные орбиты с большими полуосями в интервале 2000^20 000 км (соответствующие высоты ~260...18 260 км) [4]. Для многоспутниковой окололунной ОГ необходимо ограничить номенклатуру околокруговых орбит высотами 1000...4260 км и наклонением 58° в целях снижения затрат рабочего тела на коррекцию орбиты. Для этих высот устойчивость ОГ обеспечивается в пределах 150…200 суток при соответствующем подборе начальных параметров орбит. Поэтому при больших сроках функционирования необходимо корректировать параметры орбиты. Затраты характеристической скорости на поддержание устойчивости ОГ составляют не более 1,2 м/с в одном цикле коррекции и не более 30 м/с за 10 лет.
Одним из свойств ОГ космических систем является кратность глобального покрытия. Для обеспечения связи достаточно однократного покрытия поверхности Луны, чтобы обеспечить 100 % доступность к си- стеме. Для навигационных систем требуется как однократное (доплеровский метод), так и 3–4-кратное покрытие поверхности Луны (дальномерный запросно-беззапросный метод). Поэтому ОГ должна выбираться в первую очередь исходя из требований навигационного обеспечения.
Согласно проведенным исследованиям [5] обеспечение связью потребителей на поверхности Луны (100 % однократное покрытие при рабочих углах места 5º) реализуется следующими ОГ:
-
- высота орбиты 1000 км, наклонение 90° (58°) , количество КА - 18 (15), размещенных равномерно в 3 плоскостях;
-
- высота орбиты 1500 км, наклонение 90° (58º), количество КА – 10 (8), размещенных равномерно в 2 плоскостях;
-
- высота орбиты 4260 км, наклонение 90° (58º), количество КА – 8 (6), размещенных равномерно в 2 плоскостях.
Для целей навигации трехплоскостная структура ОГ из 15 КА с наклонением орбиты 58°, высотой 4260 км обеспечивает глобальное 100 % 3-кратное покрытие и глобальное 99,8 % 4-кратное покрытие поверхности Луны [4], а из 18 КА 100 % 4-кратное покрытие поверхности Луны.
Анализ проведенных исследований по ОГ [4; 5] позволяет осуществить предварительный синтез следующих альтернативных вариантов структур ОГ, одновременно обеспечивающих навигацию и связь потребителей, размещаемых на поверхности Луны:
-
1. ОГ с однократным покрытием для дуплекс -ной связи и пассивной доплеровской навигации: высота орбиты 1000 км ( а = 2737 км), наклонение 58º , количество НКА – 15, размещенных в трех плоскостях, равномерно по 5 КА в плоскости.
-
2. ОГ с 3(4)-кратным покрытием для дуплекс -ной связи и активной (пассивной) дальномерной навигации: высота орбиты 4260 км ( а = 6000 км), наклонение 58º, количество НКА – 15 (18), равномерно размещенных в трех плоскостях.
-
3. ОГ с двукратным покрытием для дуплекс -ной связи и активной дальномерной навигации: высота орбиты 4260 км ( а = 6000 км), наклонение 58º, количество НКА – 8–10, равномерно размещенных в двух плоскостях.
Первый и второй варианты ОГ мало отличаются по количеству КА, поэтому вы- бор должен осуществляться между ними и третьим вариантом, который дает существенный выигрыш по количеству КА. В первую очередь необходимо обосновать возможность применения доплеровского метода навигации для этого класса орбит (высоты 1000-4260 км), исходя из требований по точности и длительности навигационных определений, а также принципов организации баллистического обеспечения: эфемеридно-временного и геодезического обеспечения.
В настоящее время баллистическое обеспечение лунных миссий осуществляется наземными средствами дальней космической связи и автономными системами доставляемых к Луне космических средств. Создание орбитальной группировки спутников Луны, решающей задачи связи и навигации, связано с необходимостью упреждающего размещения на поверхности Луны базовой станции информационного обеспечения, а также триангуляционной селенодезической сети пунктов, используемых для решения задачи баллистического обеспечения спутников. Это позволит повысить точность навигационных определений и расширит зону обслуживания, охватывающую обратную сторону Луны.
Предлагается орбитальные измерения спутников Луны проводить с помощью специально создаваемой триангуляционной селенодезической сети пунктов на базе автономных селенодезических пунктов (СДП) с длительным сроком эксплуатации. Этому принципу удовлетворяют СДП, оснащенные пассивными отражателями сигналов спутника в радиотехническом диапазоне. В этом случае в режиме ретрансляции средствами СДП запросного сигнала на спутнике проводятся измерения дальности до СДП, которые передаются в Центр. Реализация запросного режима обеспечивается установкой на спутнике радиотехнического приемопередающего измерительного комплекса, а также средств межспутниковых измерений и информационного обмена. Для рассматриваемых типов орбит достаточно 10–12 СДП, равномерно размещенных на поверхности Луны. Задача построения триангуляционной селенодезической сети пунктов включает разработку селенодезического спутника и селенодезических пунктов, доставку их в зону приме-
■J ИССЛЕДОВАНИЯ
Havko- жГРАДА
нения. Эта проблема подробно исследована в работе [6].
4. Особенности информационнонавигационного обеспечения космических потребителей
При информационно-навигационном обеспечении мобильных потребителей, перемещающихся по поверхности Луны, КА должен излучать сигнал в конусе, охватывающем Луну. Исходя из этого требования рассчитаем ширину диаграммы направленности глобальной антенны для случая нулевого угла места видимости потребителем П 0 КА 2 (рис. 1):
Р п2
= arcsin -
X
— sin Y п 2
( ГП 2
-Y П 2 , )
где r П – радиус-вектор орбиты космического потребителя, r П2 < r КА .
Одновременно с этим у космического
потребителя, находящегося выше орбиты КА (П 1 ), должна быть антенна, ширина диаграммы которой определяется углом γП (рис. 1):
Y щ
= arcsin -
r КА
к Г П )
I ^ Л Y 0 = arcsin - —Л-
,
V гка )
где R Л - радиус Луны; r КА - радиус-вектор орбиты КА.
где r П – радиус-вектор орбиты космического потребителя, r П > r КА .
Для случая, когда космический потребитель находится ниже орбиты КА (П2), антенна потребителя должна обеспечивать прием сигнала в диапазоне углов 0 < γН< 180° – γ0:
X
П 1
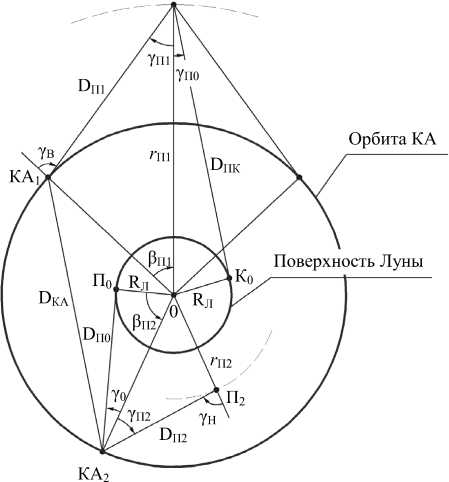
Рис. 1. Схема взаимной видимости «КА–потребитель»
Y н
= 180 °- arcsin -
— sin Y п2 к ГП 2
V
Таким образом, спутниковая навигация и связь космического потребителя с помощью окололунной ОГ связаны с необходимостью обеспечения изотропного излучения сигнала (на всю сферу) или применения двухлучевой антенной системы, обслуживающей всю сферу. Аналогичным образом эта задача должна решаться и у потребителя.
Для космического потребителя, находящегося выше орбиты КА (П1), навигация возможна, если на КА установить антенну, излучающую сигнал во внешнюю полусферу, а для находящегося ниже орбиты КА (П 2 ) спутниковая навигация возможна, если на КА сформировать отдельный узкий луч, отклоняемый на заданный угол γП , или расширить диаграмму до полусферы. Расчет угла γП зависимости от положения потребителя βП проводится с использованием следующего уравнения (рис. 1):
5. Альтернативное навигационно-связное обеспечение космических потребителей
В качестве альтернативы можно рассматривать вариант навигационного обеспечения космических потребителей с помощью сети селенодезических пунктов (СДП). В этом случае космический потребитель излучает запросный сигнал через антенну, ширина диаграммы направленности которой должна удовлетворять условию (рис. 1)
Y п0 = arcsin '
R Л
к ГП1 )
Группа из трех и более СДП ретранслирует запросный сигнал космического потребителя, тем самым реализуется триангуляционный метод измерений орбиты космического потребителя. Однако информационное обеспечение космического потребителя в данном
случае должно осуществляться непосредственно наземными станциями связи и только на орбитах, видимых с Земли (вне зон экранирования Луной). В этом варианте на космическом потребителе должна быть установлена навигационно-связная аппаратура.
6. Выбор частотного диапазона для окололунной навигации
Для окололунной навигации из-за отсутствия атмосферы и ионосферы достаточно одночастотного сигнала. Выбор номинального значения частоты навигационного сигнала осуществим исходя из условия повышения энергетики радиолинии, возможности совме- щения радиолинии связи и навигации, а также удовлетворения требований регламента радиосвязи для наземных служб.
Представим уравнение для расчета радиолинии в следующем виде [3]:
р =
Р ПРМ =
Р ПРД ⋅ S ПРД ⋅ S ПРМ λ 2 d 2 ,
где Р ПРМ – мощность принимаемого сигнала; Р ПРД – мощность излучаемого сигнала; λ – длина радиоволны; d - дальность радиолинии; S ПРД, S ПРМ - эффективная площадь антенны передающего и приемного пунктов.
Для оценки влияния длины радиоволны на параметры радиолинии преобразует уравнение (6) к следующему виду:
S прд " S прм = ^ • d • — . (7) Р ПРД
При постоянных значениях d, Р ПРМ , Р ПРД уменьшение длины волны позволяет уменьшить эффективную площадь антенн, что облегчает аппаратурную реализацию как на КА, так и у потребителя.
Полагая возможным совмещение навигационного и связного радиосигнала, используем возможность применения частотного диапазона 11/14 ГГц земных станций спутниковой связи, выделенных регламентом радиосвязи (см. рис. 2): «Земля–Луна» – 14 ГГц, «Луна–Земля» – 11 ГГц.
Полагая, что базовая лунная станция связи (БЛСС) использует эту же радиолинию для связи с КА окололунной ОГ, получим следующий частотный план: «БЛСС–КА» –
11 ГГц, «КА–БЛСС» – 14 ГГц. 19
Учитывая малочисленность потребите лей, принимаем этот же частотный план и для радиолинии: «КА – потребитель» – 14 ГГц, «Потребитель – КА» – 11 ГГц.
По результатам проведенных исследова ний можно сделать следующие выводы:
-
1. Глобальная оперативная навигация и связь мобильных потребителей на поверхности Луны обеспечивается многоспутниковой ОГ, использующей круговые орбиты высотой 1000…4260 км и наклонением 58°.
-
2. Оперативная спутниковая навигация и связь окололунных космических потребителей с помощью окололунной ОГ обеспечивается при реализации радиоконтакта для любого взаимного положения потребителя и КА (в верхней и нижней полусферах), что связано с необходимостью применения следящих лучевых антенных систем на КА и у потребителя, или организации изотропного излучения сигнала.
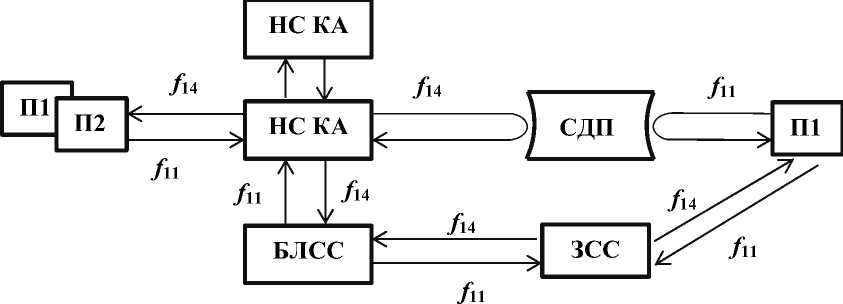
Рис. 2. Частотный план: ЗСС – земная станция связи; СДП – селенодезический пункт с пассивным радиоотражателем; НСК – навигационно-связной КА
-
3. На основании проведенного анализа предложено для целей навигации и связи использовать единый частотный план «Потребитель – КА» – 11 ГГц, «КА – потребитель» – 14 ГГц.
-
4. Рассмотрен вариант обеспечения окололунных космических потребителей связью непосредственно с наземными станциями и навигацией по схеме пассивного отражения селенодезическим пунктом запросного сигнала.
С увеличением высоты количество КА уменьшается с 15 до 6, однако снижается качество навигации доплеровским методом. Стабильность окололунных ОГ можно поддерживать периодической коррекцией орбит.
Havko____________
Ж ГРАДА
Список литературы Концепция окололунной навигации
- Сетевые спутниковые радионавигационные системы / В. С. Шебшаевич, П. П. Дмитриев, Н. В. Иванцев [и др.]; под ред. В. С. Шебшаевича.2-е изд., перераб. и доп. М.: Радио и связь, 1993. 408 с.
- ГЛОНАСС. Принципы построения и функционирования / под ред. А. И. Перова, В. Н. Харисова. 4-е изд., перераб. и доп. М.: Радиотехника, 2010. 800 с.
- Чеботарев В. Е., Косенко В. Е. Основы проектирования космических аппаратов информационного обеспечения: учеб. пособие / Сиб. гос. аэрокосм. ун-т. Красноярск, 2011. 488 с., [24] с
- Болкунов А. И., Сердюков А. И., Игнатович Е. И., Балашова Н. Н., Синцова Л. Н., Золкин И. А. Выбор орбитальной группировки для лунной информационно-навигационной обеспечивающей системы. М.: Технический журнал «Полет», 2012. № 3. С. 52-59.
- Чеботарев В. Е., Шмаков Д. Н., Анжина В. А. Концепция лунной системы спутниковой связи // Исследования наукограда. 2014. № 1(7). С. 26-31.
- Чеботарев В. Е., Звонарь В. Д., Грицан О. Б., Внуков А. А. Концепция построения триангуляционной селенодезической сети // Исследования наукограда. 2014. № 2(8). С. 15-21.
- Проектирование автоматических космических аппаратов для фундаментальных научных исследований: в 2 т. Т. 1 / сост.: В. В. Ефанов, И. Л. Шевалев; под ред. В. В. Ефанова, К. Н. Пичхадзе. М.: Изд-во МАИ, 2012. 526 с.
