Концепция построения триангуляционной селенодезической сети

Автор: Чеботарев В.Е., Звонарь В.Д., Грицан О.Б., Внуков А.А.
Журнал: Космические аппараты и технологии.
Рубрика: Космонавтика
Статья в выпуске: 2 (8), 2014 года.
Бесплатный доступ
Разработаны принципы построения триангуляционной селенодезической сети на базе пассивных радиоотражателей и активных приемоответчиков. Проведены оценки параметров селенодезического спутника, решающего задачи измерений дальности до селенодезического пункта активным и пассивным методом, высоты орбиты, информационной связи с наземным пунктом. Сформированы варианты построения активного и пассивного селенодезических пунктов и оценена их масса. Определено количество одновременно выводимых селенодезических пунктов совместно с селенодезическим спутником в орбитальном лунном блоке и принципы их мягкой посадки на поверхность Луны.
Триангуляционная селенодезическая сеть, пассивный радиоотражатель, селенодезический спутник, селенодезический пункт
Короткий адрес: https://sciup.org/14117322
IDR: 14117322 | УДК: 528:532.3
Concept of triangulation selenodesy network design
There are developed principles of triangulation selenodesy network design based on passive radio reflectors and active tranceivers. Parameter assessment is done for selenodesy satellite designed for measuring of the orbit altitude and the distance to selenodesy station using active and passive methods, as well as for communication with ground station. Variants of active and passive selenodesy station design were selected and station mass was estimated. Number of selenodesy stations to be simultaneously injected into lunar orbit by selenodesy satellite are defined, and soft landing on the lunar surface are done.
Текст научной статьи Концепция построения триангуляционной селенодезической сети
рое подразумевает организацию транспортных потоков «Земля - Луна - Земля», перемещение по поверхности Луны и вблизи ее поверхности мобильных транспортных средств.
Решение перечисленных задач потребует создания на постоянной основе информацион- ной окололунной спутниковой системы длительного функционирования для обеспечения связью и навигацией мобильных транспортных средств на поверхности Луны и вблизи ее [1].
Развертывание орбитальной группировки спутников Луны, решающих задачи связи и навигации, связано с необходимостью упреждающего размещения на поверхности Луны средств автоматического контура управления и баллистического обеспечения и, в первую очередь, размещения триангуляционной селенодезической сети пунктов для баллистического обеспечения окололунной спутниковой группировки.
Принципы построения триангуляционной селенодезической сети
Задача создания триангуляционной селенодезической сети пунктов включает следующие этапы: разработку селенодезического спутника (СДС) и оборудования селенодезического пункта (СДП), изготовление и доставку на окололунную орбиту СДС и нескольких СДП, поочередную мягкую посадку каждого СДП в заданную точку поверхности Луны, организацию селенодезической привязки СДП в лунной системе координат.
Триангуляционная селенодезическая сеть пунктов должна создаваться исходя из условия использования ее в будущем в составе лунной информационно-навигационной обеспечивающей системы (ЛИНОС) [1]. Поэтому селенодезические пункты должны быть автономными, необслуживаемыми и иметь длительный срок эксплуатации. Этому принципу наиболее полно удовлетворяют СДП, оборудованные пассивными отражателями радиосигналов со спутника. Количество СДП и схема их размещения должны выбираться из условия достаточности измерительной информации для решения задачи эфемеридного обеспечения спутников ЛИНОС. В предельном случае должна обеспечиваться непрерывная видимость отдельным спутником не менее одного СДП в течение всего витка.
Принцип развертывания селенодезической сети пунктов зависит от используемых средств выведения. Энергетические возможности современных средств выведения среднего класса достаточны для совместной доставки (в составе орбитального блока) одного селенодезического спутника и несколько СДП на окололунную орбиту [2].
Для спуска СДП на поверхность Луны предпочтительнее использовать предельно низкие круговые орбиты (высота 100 км), как энергетически более выгодные для транспортного модуля СДП. В этом случае орбитальный блок вначале будет выведен на низкую круговую орбиту, а после спуска СДП спутник будет возвращен на рабочую орбиту (высота 1500–4260 км).
Поэтому задачу определения координат СДП после их спуска предлагается решить во время пребывания СДС на низких круговых 5 орбитах, используя запросный (со спутника) дальномерно-доплеровский метод измерений ответных сигналов от СДП, формируемых активным приемоответчиком.
Затем, после перехода СДС на рабочую орбиту, необходимо использовать штатную схему самоопределения координат СДС на основе запросного дальномерного метода с использованием пассивных отражателей радиосигналов.
В результате на СДП необходимо установить совокупность уголковых радиоотражателей, образующих ретрорефлекторную антенную систему, а также приемоответчик, обеспечивающие работу со спутником во всем диапазоне рабочих углов (в верхней полусфере).
Наличие измеренных значений дальности позволит решить прямую задачу координатной привязки СДП при известных параметрах орбиты СДС и обратную задачу – самоопределение параметров орбиты СДС при известных координатах СДП. Однако во всех случаях необходимо привлекать наземные радиотехнические средства для определения параметров орбиты СДС (на видимых с Земли участках орбиты) и координат СДП, размещенных на видимой с Земли стороны Луны [3].
Обоснование требований к селенодезическому спутнику
Согласно вышеизложенным принципам построения триангуляционной селенодезической сети на селенодезическом спутнике должен быть размещен радиотехнический комплекс, решающий следующие задачи:
-
- запросные измерения наклонной дальности до СДП по пассивной и активной схемам;
-
- запросные измерения высоты орбиты;
-
- измерения орбиты и информационный обмен с наземными средствами радиосвязи.
U ИССЛЕДОВАНИЯ
плуко____________
■ ГРАДА
Результаты расчета параметров такого радиотехнического комплекса СДС, проведенного в авторской работе [4], следующие: - диаметр антенны 2,3-3,0 м;
-
- излучаемая мощность 400 Вт (имп), 20 Вт (ср);
-
- точно сть слежения 0,15°.
Затраты ресурсов на реализацию радиотехнического комплекса СДС составят [5]: масса – 40 кг, энергопотребление – 150 Вт.
При этом для решения задачи создания селенодезической сети пунктов необходимо 6 привлечь:
-
- наземные станции космической связи Ku-диапазона (максимальная пропускная способность 512 кбит/с, диаметр антенны 5 м, мощность передатчика на частоте f = 14 ГГц - 10 Вт и пороговый энергопотенциал на частоте приема f 11 = 11 ГГЦ( С / ^ 0 ) = = 65,1 дБ; пор
-
- наземные станции дальней космической связи для определения параметров орбиты СДС и координат СДП (диаметр антенн более 70 м).
Так как СДС должен осуществлять орбитальные маневры, то на нем необходимо установить систему коррекции.
Требуемые затраты характеристической скорости для реализации маневров определим используя уравнение расчета скорости искусственного спутника Луны (ИСЛ), в данном случае СДС, [5]:
Расчетную массу СДС определим с использованием методики, приведенной в работе [5].
Используя уравнение Циолковского, получим у хар Н VИСТ
-
- е - А 1 , V хар -А V 1 - 2 - 3
тК или Vxap =А V1-3, (2)
где m Н, m К - начальная и конечная масса СДС; V ИСТ – скорость истечения реактивной струи.
Представим начальную и конечную массы СДС в виде составляющих: масса полезного груза m 0, масса баков с рабочим телом, которая пропорциональна (К - коэффициент пропорциональности) массе рабочего тела m Р.Т:
m Н = m 0 + К / m Р.Т + m Р.Т , m К = m 0 + К/ m р.т - (3)
После совместного решения уравнений (2) и (3) и подстановки Vхар ≈ 0,711 км/с, VИСТ ≈ 2,2 км/с, Куд = 0,3 получим тРТ = —:—0---=0,43т0, т т
ЦП - Куд m Н = т 0 ■
А 1
1 - ( А 1 - 1) ■ К уд
= 1,56 т 0 .
'
R л ----, (1)
у гисл аисл у где RЛ - средний радиус Луны, RЛ = 1738 км; V0Л - скорость ИСЛ на круговой орбите с нулевой высотой; V0Л = 1,68 км/с; rИСЛ – текущее значение величины радиуса орбиты ИСЛ; aИСЛ – большая полуось орбиты ИСЛ.
Рассмотрим три типа круговых орбит СДС: r 1 = 1838 км, r 2 = 4000 км, r 3 = = 6000 км. Орбитальные переходы потребуют следующих затрат характеристической скорости: с 1-й на 2-ю А V 1-2 = 0,51 км/с, с 2-й на 3-ю ∆ V 2-3 = 0,201 км/с, с 1-й на 3-ю ∆ V 1-3 = 0,673 км/с.
Программа селенодезических измерений на трех круговых орбитах (№ 1, 2, 3) потребует затрат суммарной характеристической скорости на орбитальные маневры А V 1-2,3 = 0,711 км/с, а на двух орбитах А V 1-3 = = 0,673 км/с (отличие на 6 %).
Формула (4) может быть использована для проектной оценки массы СДС при известном значении номинальной массы СДС m 0.
Номинальная масса спутника, реализующего целевую задачу, пропорциональна обобщенной массе полезной нагрузки (радиотехнический комплекс):
т о =
т ПН + К W ■ W HH
К ПН
где КПН – средний коэффициент парциальных затрат ресурсов спутника на полезную нагрузку; К W - средний коэффициент парциальных затрат на генерирование электроэнергии и сброса тепла, кг/Вт; m ПН , W ПН - масса и энергопотребление полезной нагрузки.
Подставляя расчетные значения массы и энергопотребления радиотехнического комплекса (полезной нагрузки) в уравнение (5) и используя среднестатические значения коэффициентов для КА информационного обеспечения: КПН ~ 0,4, КW ~ 0,14, получим m0 = (40 + 0,14^150)/0,4 ~ 150 кг. Тогда согласно формуле (4) масса СДС и его заправки составит 234 кг и 65 кг соответственно.
Селенодезический пункт
Селенодезическая сеть формируется из множества однотипных селенодезических пунктов, обеспечивающих длительную автономную работу в условиях циклической смены лунного дня и ночи (длительность цикла 29,5 сут.). Количество СДП и схема их размещения определяются необходимостью их эксплуатации в составе ЛИНОС.
Рассматриваются два варианта комплектации СДП целевой аппаратурой: только пассивными радиоотражателями (вариант 1), активным приемоответчиком и пассивными радиоотражателями (вариант 2).
В варианте 1 в состав СДП должны входить : транспортный модуль и модуль уголковых радиоотражателей (УРО).
В зависимости от располагаемых возможностей по объему и массе модуль УРО может строиться из четырёх треугольных УРО (модуль № 1 УРО с провалом в зенитной зоне обзора), из четырёх треугольных УРО и одной двухгранной пластины посередине (модуль № 2 УРО с обзором в верхней полусфере) и шести УРО, работающих в зенитном направлении, плюс шести УРО, работающих в промежуточных углах (модуль № 3 УРО с обзором в верхней полусфере) (рис. 1). С целью эффективной компоновки СДП в составе КА под обтекателем РН целесообразно использовать складной УРО, в котором в качестве отражающих поверхностей используется гибкое сетеполотно из золочёной проволоки малого сечения.
В сложенном положении габаритные размеры модуля № 3 УРО: высота равна примерно длине ребра, поперечный размер – меньше четверти ребра. Согласно проведенным расчетам [4] размер ребра должен быть не менее 1 м. Тогда оценочное значение массы модуля № 3 УРО составит около 10 кг. 7
В варианте 2 в состав СДП должны входить :
-
- транспортный модуль;
-
- активный приемоответчик;
-
- модуль УРО;
-
- система электропитания и терморегулирования;
-
- силовая конструкция приборного радиоэлектронного блока.
Согласно проведенным расчетам [4] активный приемоответчик должен принимать сигнал на частоте 11 ГГц в зоне верхней полусферы и переизлучать в верхнюю полусферу (мощность излучения 0,2 Вт) на частоте 14 ГГц. Для Ku-диапазона возможно реализовать диаграмму шириной ± 70° с усилением не хуже минус 4 дБ с помощью открытого волновода специальной формы [5]. При этом целесообразно использовать две антенны: на прием и на передачу. Затраты ресурсов на реализацию активного приемоответчика со-
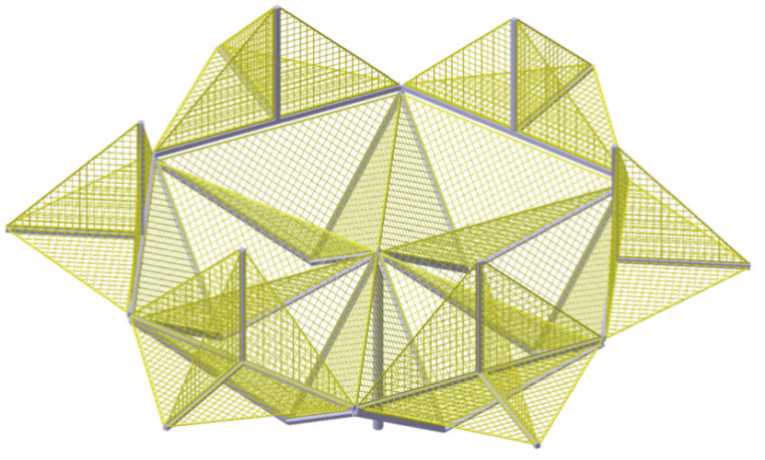
Рис. 1. Трёхмерная модель складного модуля № 3 УРО
U ИССЛЕДОВАНИЯ плуко____________ ■ ГРАДА ставят: масса - не более 3 кг, энергопотребление – не более 6 Вт.
Рассмотрим три схемы применения активного приемоответчика:
-
- на начальном этапе только для определения координат СДП (до 30 сут.);
-
- на всем этапе функционирования СДС для определения координат СДП и СДС в дневной период лунного месяца;
-
- на всем этапе функционирования СДС для определения координат СДП и СДС непре- 8 рывно в течение лунного месяца.
Длительность лунного дня зависит от широты расположения СДП и углов экранирования местности:
СДП
7 ЛД = Т СМ ,
π sinα costСДП =-----—, cos Фсдп
где t СДП - часовой угол положения СДП относительно плоскости, проходящей через полюс Луны и направленной на Солнце; Т СМ - синодический месяц, Т СМ = 29,5 сут.; αЭ – угол экранирования, аЭ< 5°; фСДП - широта расположения СДП.
Результаты расчета представлены в табл. 1.
Таблица 1
|
Широта СДП, град |
0 |
50 |
70 |
|
Длительность светового дня
|
14,0 47,3 |
13,5 45,7 |
12,3 41,8 |
Для первой схемы возможно применение системы электропитания (СЭП), использующей только химические источники тока, обеспечивающие энергопотребление нагрузки 6 Вт (требуемая энергоемкость 5000 Вт∙ч). При удельных характеристиках химических источников тока 200 Вт^ч/кг потребуется затратить массу около 25 кг.
Для второй схемы в состав СЭП должны входить: генератор – солнечные батареи (СБ), аккумуляторная батарея (АБ) и блок управления. Учитывая небольшие потребности в электроэнергии, СБ можно выполнить неори-ентируемыми в виде двух панелей, установленных под углом 90° (потери в энергосъеме не более 30 %). В этом случае площадь СБ на основе арсенид галлия составит 0,1 м2, а масса 1,0 кг.
Так как АБ необходима только на период лунной ночи для поддержания теплового режима при выключенном приемоответчике (теплопотери 2-4 Вт), то требуемая энергоемкость составит 1600 Вт∙ч, а масса литий-ионных аккумуляторов около 10 кг (удельная энергоемкость 160 Вт∙ч/кг). Рассматриваемый блок управления СЭП выполняет функцию управления зарядом/разрядом АБ, стабилизации напряжения, управления тепловым режимом, поэтому его масса не превысит 3 кг.
Для третьей схемы, обеспечивающей непрерывную работу приемоответчика, энергоемкость АБ должна составлять 2300 Вт∙ч, а их масса 15 кг. При этом площадь СБ и ее масса по сравнению со схемой 2 должны быть увеличены в 2 раза.
Система терморегулирования (СТР) СДП пассивная, использующая электрообогреватели и механические системы многократного закрытия приборной части при-емоответчика и СБ на период лунной ночи и открытия на период лунного дня. Общие затраты массы на терморегулирование и силовую конструкцию составят ~ 2 кг.
Обобщенная номинальная масса оборудования СДП (без транспортного модуля) приведена в табл. 2.
Таблица 2
|
№ п/п |
Наименование |
Масса, кг |
Примечание |
|
1 |
Приемоответчик |
3,0 |
|
|
2 |
Модуль УРО |
10,0 |
|
|
3 |
СЭП и СТР - схема 1 - схема 2 - схема 3 |
25,0 16,0 22,0 |
Работа до 30 суток Работа в лунные дни Непрерывная работа |
|
4 |
СДП - схема 1 - схема 2 - схема 3 |
38,0 29,0 35,0 |
Работа до 30 суток Работа в лунные дни Непрерывная работа |
Каждый СДП оснащен транспортным модулем, обеспечивающим сход с орбиты и последующую мягкую посадку СДП на поверхность Луны, осуществление пространственной ориентации и стабилизации в процессе маневрирования, а также контроль высоты на завершающих этапах спуска.
Сход всех СДП с орбиты осуществляется поочередно, с задержкой по времени, достаточной для равномерного размещения
Таблица 3
Спуск СДП осуществляется с использованием переходной эллиптической орбиты, у которой радиус апогея равен радиусу опорной орбиты: r а = r , а радиус перигея равен среднему радиусу Луны: r П = R Л .
Приращение скорости в точке схода с опорной орбиты согласно формуле (1) составит: А V а = V а - V on = V oЛ . (1,014 - 0,9724) = = 0,07 км/с, а скорость СДП в точке встречи с Луной (перигей орбиты) V П = 1,014, V ) Л = = 1,7 км/с. Суммарные затраты характеристической скорости на спуск и безударную посадку СДП составят: V СДП = 1,7 + 0,07 ~ 1,77 км/с.
Расчетную массу СДП определим с использованием уравнений (2-4), после подстановки j/СДП ~ 1,77 км/с , V ~ 2,2 км/с, К = хар ИСТ уд
= 0,3 получим:
m RT = 1,95 m 0, m Н = 3,53 m 0 . (7)
Формулу (4.5) используем для проектной оценки массы СДП: сухой и заправленной на основании данных, приведенных в табл. 3.
Выведение орбитального лунного блока осуществляется с помощью РН «Союз-2.1Б» с РБ «Фрегат» и ГО 14С737. Масса блока не более 1385 кг, габаритные размеры согласно ЗПГ ГО 14С737[2].
В состав лунного блока входят селенодезический спутник (СДС) и комплект селенодезических пунктов (СДП). Количество СДП n определяется по остаточному принципу:
m СДС + n m СДП + ^ m — m ОЛБ , (8)
где m СДС – масса селенодезического спутника; m СДП – масса селенодезического пункта; ∆ m – резервная масса; m ОЛБ – масса орбитального лунного блока.
Результаты расчета по формуле (8) представлены в табл. 3.
Анализ представленных в табл. 3 данных позволяет сделать вывод о возможности одним запуском вывести на окололунную орбиту СДС и группу СДП (более 9), достаточную для создания селенодезической сети.
Представляется целесообразным создавать СДП активного типа (вариант 2) по одной из схем его применения. Выбор схемы необходимо провести при формировании конструктивно-компоновочной схемы орбитального лунного блока.
Реализация последовательной программы мягкой посадки СДП равномерно на всей поверхности Луны обеспечивается выбором времени проведения операции с учетом вращения Луны. В течение полумесяца обеспечивается полный осмотр поверхности Луны со спутника, т. е. программа спуска СДП может быть реализована в полном объеме.
Список литературы Концепция построения триангуляционной селенодезической сети
- Чеботарев В. Е., Шмаков Д. Н., Анжина В. А. Концепция лунной системы спутниковой связи // Исследования наукограда. 2014. № 1 (7). С. 26-31
- Ельников Р. В. Проектно-баллистический анализ развертывания спутников связи на окололунных орбитах // Исследования наукограда. 2014. № 1 (7). С. 32-37
- Космическая геодезия: учебник для вузов / В. Н. Баранов, Е. Г. Бойко, И. И. Краснорылов [и др.]. М.: Недра, 1986. 407 с.
- Чеботарев В. Е., Грицан О. Б. Расчет радиолинии селенодезического спутника // Исследования наукограда. 2014. № 2(8). С. 15-21.
- Чеботарев В. Е., Косенко В. Е. Основы проектирования космических аппаратов информационного обеспечения: учеб. пособие / Сиб. гос. аэрокосм. ун-т. Красноярск, 2011. 488 с., [24] с.
