Концептуально-проектные исследования электроракетного разгонного блока для развёртывания многоплоскостной орбитальной группировки малых космических аппаратов

Автор: Левандович А.В., Мосин Д.А., Синявский В.В., Тютюкин А.Е., Уртминцев И.А.
Журнал: Космическая техника и технологии @ktt-energia
Рубрика: Тепловые, электроракетные двигатели и энергоустановки летательных аппаратов
Статья в выпуске: 2 (33), 2021 года.
Бесплатный доступ
Приведены результаты концептуально-проектных исследований облика электро -ракетного разгонного блока (ЭРБ) - космического транспортного блока (буксира) с маршевыми электроракетными двигателями (ЭРД), питаемыми от солнечных батарей. Рассмотрена задача развёртывания многоплоскостной низкоорбитальной группировки малых космических аппаратов (МКА) с использованием ЭРБ. Смену плоскостей орбиты функционирования МКА предложено формиро вать на основе учёта влияния разности скоростей прецессии опорной и рабочей орбит из-за влияния нецентрально сти гравитационного поля Земли. Определены требования к энергодвигательной системе ЭРБ с учетом её работы для компенсации аэродинамического сопротивления в процессе ожидания на опорной орбите поворота плоскости орбиты функционирования МКА. Показана возможность при использовании четырёх ЭРБ на основе ЭРД типа «стационарный плазменный двигатель» в качестве маршевых двигателей и арсенид-галлиевых солнечных батарей осуществить развёртывание на орбите высотой 600 км в четырёх плоскостях орбитальной группировки из 24 малых КА массой ~250 кг каждый одним пуском РН среднего класса типа «Союз-2.1б».
Электроракетный разгонный блок, электроракетный двигатель, малый космический аппарат, орбитальная группировка
Короткий адрес: https://sciup.org/143178154
IDR: 143178154 | УДК: 629.78.036.7-112 | DOI: 10.33950/spacetech-2308-7625-2021-2-76-87
Conceptual design studies of an electrically propelled upper stage for deployment of a multi-plane orbital constellation of small spacecraft
The paper presents results of conceptual design studies to determine configuration of an electrically propelled upper stage (EPUS) - a space transportation stage (a space tug) with main engines based on electric propulsion powered by solar arrays. It addresses the problem of deploying a multi-plane orbital constellation of small spacecraft (SSC) using an electrically propelled upper stage. It proposes to change the SSC operational orbital planes based on the effect of the difference in precession rates between the parking and the working orbits owing to the effect of eccentricity in the Earth gravitational field. Requirements have been defined for the EPUS electrical propulsion system that take into account the need to operate it to offset the aerodynamic drag while waiting in the parking orbit for the SSC operational orbital plane to turn. It demonstrates the feasibility of employing four EPUS that use Stationary Plasma Thruster-type electric propulsion as their main engines and gallium arsenide solar arrays for deployment in a 600 km orbit in four planes an orbital constellation of 24 small spacecraft with a mass of ~250 kg each using one launch of a medium capacity launch vehicle of Soyuz-2.1b type.
Текст научной статьи Концептуально-проектные исследования электроракетного разгонного блока для развёртывания многоплоскостной орбитальной группировки малых космических аппаратов
левандович а.в.
моСин д.а.
СинявСкий в.в.

тЮтЮкин а.е.
уртминцев и.а.
TYUTYUKIN Aleksandr Evgenyevich — Candidate of Science (Engineering),
Senior research scientist at the Military institute (research institute) at MSA named after
Рост требований к качеству и оперативности информации, получаемой с помощью космических систем, основан на возможности применения многоспутниковых орбитальных группировок (ОГ) космических аппаратов (КА) [1–3]. В ряде случаев, например, при создании глобальной спутниковой системы связи и инфотелекоммуникации, задача решается на основе использования малых космических аппаратов (МКА), имеющих сравнительно небольшую массу. Количество МКА, входящих в такую группировку, может достигать десятков и даже сотен единиц [4–6].
Появление подобных ОГ МКА ставит задачу модернизации способов их развёртывания с целью повышения эффективности применения средств выведения. Прежде всего отметим, что энергетическая возможность существующих ракет-носителей (РН) избыточна для выведения на орбиту единичных микро- и наноспутников, что приводит к необходимости кластерных (групповых) пусков, т. е. за один пуск РН можно вывести на орбиты сразу несколько КА, что позволяет значительно снизить стоимость создания ОГ.
При групповом (пакетном) способе выведения очень важной становится задача разведения МКА по ячейкам баллистической структуры, особенно когда необходимо развести МКА по разным плоскостям орбит.
В настоящее время МКА выводятся на целевые орбиты посредством разгонных блоков (РБ) с химическими двигателями, прежде всего — жидкостными ракетными двигателями (ЖРД) [7]. Процесс выведения занимает мало времени, но требует значительных энергетических затрат, в т. ч. затрат рабочего тела. Разгонные блоки занимают определённый объём, который мог бы использоваться для выведения полезной нагрузки.
В настоящей работе решение задачи разведения МКА по ячейкам баллистической структуры многоспутниковой ОГ предлагается на основе применения специального электроракетного разгонного блока (ЭРБ).
Электроракетные двигатели (ЭРД) обладают повышенным в несколько раз (относительно ЖРД) удельным импульсом, что позволяет соответственно снизить затраты рабочего тела для решения одной и той же баллистической задачи [8–9]. Платой за уменьшение требуемой массы рабочего тела является увеличение времени транспортировки и, естественно, наличие на борту ЭРБ источника электроэнергии.
Отметим, что имеется опыт использования ЭРД для установки КА в рабочую точку орбиты функционирования. Так, впервые в мире телекоммуникационный КА «Ямал-100» был установлен в рабочую точку на геостационарную орбиту (ГСО) с помощью ЭРД коррекции орбиты и разгрузки кинетического момента в составе этого КА [2]. В работе [10] приведены результаты баллистических расчётов установки в течение примерно двух месяцев в свои рабочие точки на ГСО выведенных РН «Протон» с РБ ДМ на орбиту, близкую к ГСО, двух телекоммуникационных КА «Ямал-200-1» и «Ямал-200-2». Установка КА в рабочие точки ГСО выполнялась с помощью работы двух из восьми тяговых модулей на основе ЭРД коррекции орбиты в составе этих КА. В качестве ЭРД на КА были установлены стационарные плазменные двигатели СПД-70 электрической мощностью 675 Вт, удельным импульсом 1 440 с и тягой 4 гc. Отметим, что данные ЭРД разработки ОКБ «Факел» [11] и тяговые модули на их основе разработки РКК «Энергия» обеспечили функционирование одного из этих КА в течение более 15 лет [10].
В настоящей работе рассмотрим использование ЭРД в качестве маршевых двигателей в составе специального ЭРБ, предназначенного для транспортирования КА с опорной орбиты на целевую (рабочую), разведение МКА в рабочие точки в плоскости этой орбиты и при необходимости перемещение в другую точку другой орбиты или даже удаление МКА с этой орбиты.
Постановка задачи концептуально-проектных исследований облика эрб
Для определённости примем, что ОГ МКА предназначена для обеспечения связи в любой точке нашей страны, включая северные территории. Поэтому запуск групп МКА производится с космодрома «Плесецк» с помощью РН среднего класса «Союз-2.1б». В качестве целевой орбиты МКА примем орбиту высотой 600 км.
В задачу проектно-концептуальных исследований входили определение облика ЭРБ с выбором оптимального типа и количества ЭРД, причём с учётом необходимости компенсации сопротивления атмосферы в течение времени ожидания при смене плоскости орбит, разработка схемы выведения одной РН групп МКА для разных плоскостей целевых орбит. Отметим, что с учётом того, что масса обычных РБ, используемых в настоящее время для вывода МКА, значительно больше массы предлагаемого ЭРБ, необходимо было учесть определённые ограничения на массовые характеристики и самого МКА при компоновке как ЭРБ, так и транспортного средства, выводимого одним пуском РН.
компоновка транспортного средства и схема выведения
В результате выполненных проектноконцептуальных проработок предлагаются следующие схемно-компоновочные решения:
-
• шесть МКА и ЭРБ образуют общий транспортный блок (ТБ) (рис. 1);
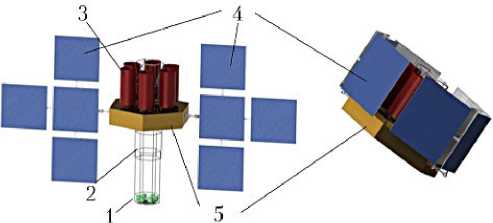
Рис. 1. Транспортный блок: 1 — электроракетная двигательная установка; 2 — выдвижная штанга; 3 — МКА;
4 — панели солнечной батареи; 5 — КА-буксир
-
• четыре ЭРБ с 24 МКА образуют сборку (или пакет) ТБ, представленную на рис. 2;
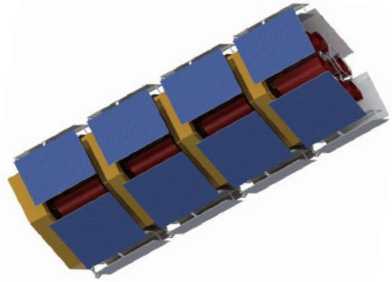
Рис. 2. Сборка (пакет) из четырëх транспортных блоков
• пакет из четырёх соединённых тандемом ТБ помещается под головным обтекателем РН среднего класса «Со-юз-2.1б» (рис. 3).

Рис. 3. Четыре транспортных блока под головным обтекателем РН «Союз-2.1б»
Пуск РН «Союз-2.1б» осуществляется с испытательного космодрома Плесецк на опорную орбиту высотой 200 км с наклонением 63...88° (в зависимости от типа МКА).
Смена плоскостей орбиты
Смена плоскостей орбиты предполагается на основе учёта влияния прецессии орбиты из-за влияния нецентральности гравитационного поля Земли.
Формула для определения скорости прецессии плоскости орбиты в сутки имеет вид [12]:
X = 9,97
R э 3,5 cos( i ) a (1 – e 2)2
где R э — экваториальный радиус Земли; a — большая полуось оси орбиты; i — наклонение орбиты; e — относительный эксцентриситет орбиты.
Для опорной орбиты высотой 200 км и наклонением 63° (широта испытательного космодрома Плесецк) прецессия линии узлов орбиты составляет 4,1 °/сут, для рабочей орбиты 600 км — 3,3 °/сут [12]. Разница в скорости прецессии орбит составляет 0,8 °/сут.
Выполненные по методике работы [13] баллистические расчёты показали, что период выведения одного блока с опорной орбиты высотой 200 км на целевую высотой 600 км занимает ~20 сут. За это время поворот плоскости текущей орбиты выведения относительно исходной, на которой осталась сборка из трёх ТБ, составит ~8°. Для разведения плоскостей орбит, например, на 45°, требуется прецессия плоскостей в течение ~46 сут, что с учётом времени перелёта на рабочую орбиту составит ~66 сут для цикла разведения блоков по смежным плоскостям. Таким образом, общее время формирования ОГ в четырёх плоскостях составит ~264 сут. После достижения заданной плоскости ЭРБ производит установку МКА в заданное положение на орбите.
В ожидании изменения плоскости орбиты предполагается постоянная работа трёх СПД-100 одного из ТБ для преодоления силы лобового сопротивления ~200 мН (рис. 4). При этом будет израсходовано до 340 кг рабочего тела (РТ) с учётом того, что все три КА-буксира в начальной стадии полёта будут жёстко сцеплены, и будут работать только три ЭРД одного из буксиров.
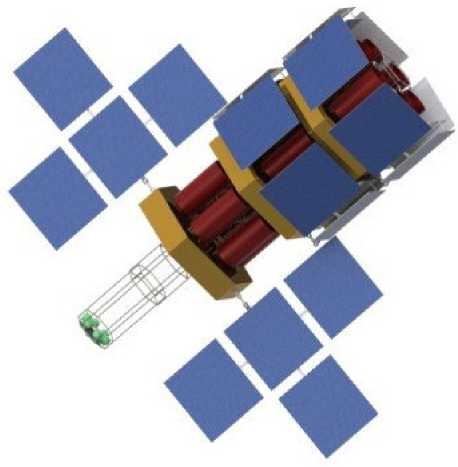
Рис. 4. Сборка из трёх транспортных блоков (ТБ) на опорной орбите после отделения одного из ТБ
оценка массы энергодвигательной системы (эдС) электроракетного разгонного блока
Применение РН «Союз-2.1б» приводит к ограничениям по массогабаритным характеристикам, а именно: масса полезного груза — до 6,8 т; объём полезного груза — до 80 м3 [14]. С учётом адаптера массой 500 кг масса одного ТБ не должна превышать 1 835 кг, из которых 1 500 кг — оцениваемая суммарная масса шести МКА, а 325 кг — оцениваемая масса ЭРБ, в состав которых входит 125 кг дополнительной массы системы хранения РТ. Дополнительное РТ обеспечивает работу ЭРДУ, компенсирующей силы аэродинамического сопротивления пакета из второго, третьего и четвертого ТБ, находящихся на опорной орбите. Каждый из указанных ТБ тягой своей ЭРДУ компенсирует аэродинамическое сопротивление пакета ТБ на опорной орбите перед перелётом на рабочую орбиту. Таким образом, общая масса ЭДС должна быть не более 200 кг.
выбор электроракетного двигателя
Рассмотрим возможность применения на ЭРБ СПД производства опытного конструкторского бюро «Факел» [11]. Характеристики СПД представлены в табл. 1 [11].
Таблица 1
характеристики СПд производства окб «факел»
|
Модель |
Тяга, мН |
Мощность, кВт |
Удельный импульс, с |
Тяговый КПД, % |
Ресурс, ч |
Масса, кг |
|
СПД-25 |
7 |
0,1 |
800…1 000 |
20 |
1 500 |
0,3 |
|
СПД-35 |
10 |
0,2 |
1 200 |
30 |
2 500 |
0,4 |
|
СПД-50 |
14 |
0,2…0,6 |
до 1 750 |
45 |
≥2 500 |
1,23 |
|
СПД-60 |
30 |
0,5 |
1 300 |
37 |
2 500 |
1,2 |
|
СПД-70 |
40 |
0,66 |
1 470 |
43 |
3 100 |
2 |
|
СПД-100В |
83 |
1,35 |
1 600 |
50 |
>9 000 |
3,5 |
|
СПД-100Д |
90 |
1,5 |
1 740 |
43 |
7 255 |
3 |
|
СПД-140 |
300 |
4,5 |
1 770 |
> 55 |
10 000 |
7,5 |
|
СПД-200 |
500 |
3…15 |
2 500 |
до 60 |
18 000 |
15 |
|
СПД-230 |
до 1 070 |
до 25 |
до 3 200 |
до 60 |
>10 000 |
25 |
|
СПД-290 |
до 1 500 |
5…30 |
3 300 |
до 65 |
27 000 |
23 |
|
СПД-1350 |
84 |
1,5 |
1 168 |
46 |
7 000 |
3,5 |
|
СПД-2300 |
98 |
2,3 |
2 500…3 000 |
65 |
7 000 |
3,5 |
После выведения сборки КА-буксиров на опорную орбиту высотой 200 км ЭРД нижнего ТБ работают непрерывно в течение 264 сут для поддержания опорной орбиты сборки КА-буксиров в ожидании необходимой прецессии, следовательно, ресурс ЭРД должен быть не меньшей продолжительности.
На опорной орбите 200 км атмосфера Земли оказывает существенное влияние на движение орбитальных объектов. Для обеспечения функционирования тяга ЭДС ЭРБ должна превышать силу лобового сопротивления.
Таким образом, требования к ЭДС рассматриваемого ЭРБ можно сформулировать следующим образом:
-
• ресурс работы не менее 6 400 ч;
-
• масса ЭДС не более 200 кг;
-
• тяга ЭРД выше силы лобового сопротивления.
Исходя из требования ресурса ЭРД ~6 400 ч, в дальнейшем не будут рассматриваться СПД-25, СПД-35, СПД-50, СПД-60 и СПД-70 в силу малости их тяговых характеристик и времени непрерывной работы. Исключим из рассмотрения также СПД-200 и СПД-290, поскольку они требуют значительного энергопотребления (табл. 1).
Требования по массе выполняются при выборе ЭДС с минимальными массовыми характеристиками.
Требования по тяге выполняются путём применения СПД с оптимальной тягой или использованием нескольких
СПД для достижения необходимой суммарной тяги. Внешний вид двух СПД представлен на рис. 5.

а)

б)
Рис. 5. Стационарные плазменные двигатели: а — СПД-230; б — СПД-100В
На высотах свыше 200 км влияние подъёмной и боковой сил незначительно. Поэтому для решения задачи выбора оптимальных ЭРД для ЭРБ достаточно будет принять в расчёт лишь одну составляющую аэродинамической силы — силу лобового сопротивления.
Уравнение для сопротивления тела при нулевой подъёмной силе будет иметь вид [15]:
X 0 = C X 0 ρ 2 V 2
S ,
где Х 0 — сила лобового сопротивления; СX — безразмерный аэродина-мический0 коэффициент сопротивления; р — плотность атмосферы; V — скорость КА; S — площадь поперечного сечения тела.
Сила тяги электроракетной двигательной установки (ЭРДУ) P компенсирует силу аэродинамического сопротивления атмосферы и ускоряет КА при перелёте. В состав ЭРДУ входит n двигателей СПД c тягой Pi каждый:
P = nP . i
Наличие нескольких СПД требует большей электрической мощности, что приводит к увеличению площади панелей солнечных батарей (СБ), непосредственно влияющих на площадь миделя объекта. В настоящее время на многих КА применяют арсенид-галлиевые фотоэлектрические преобразователи (ФЭП), удельная мощность которых составляет приблизительно Nуд = 300 Вт/м2 [16]. С учётом этого можно записать:
ρ V 2 n N
X = P = nP = C СПД + S ,
0 i X0 2 N КА уд где NСПД — электрическая мощность одного СПСД ПД; SКА — площадь миделя КА-буксира без учёта панелей солнечных батарей.
График зависимости силы лобового сопротивления и тяги от количества СПД-100В в ЭРБ представлен на рис. 6.
Из анализа графика рис. 6 видно, что для преодоления сил сопротивления на ЭРБ необходимо установить три ЭРД СПД-100В.
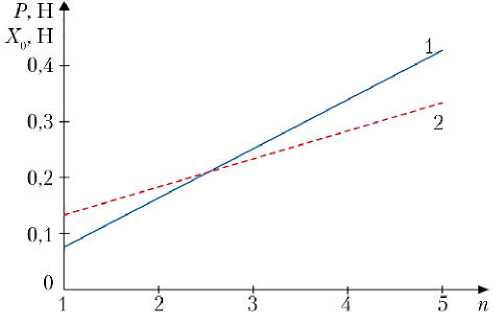
Рис. 6. График зависимости сил тяги и лобового сопротивления от количества СПД-100В: 1 — сила тяги P;
2 — сила лобового сопротивления X0
Электрическая мощность, генерируемая СБ за виток в случае, когда мощность, потребляемая ЭРД и бортовыми системами, постоянна, определяется по формуле:
N СБ
N деж ( t ос η АБ + t т )
, t ос η АБ
где N деж — электрическая мощность в дежурном режиме, равная сумме электрических мощностей ЭРД и бортовых систем; П аб — КПД аккумуляторных батарей; t ос и t т — продолжительность освещённого и теневого участков орбиты, соответственно.
С учётом вышесказанного, формула для нахождения площади СБ имеет вид [17]:
S СБ
N СБ qsηФЭПkзапexp(–kДTСАС)cos(ψсСрБ)
где qs — плотность потока солнечного излучения вблизи Земли; п ФЭП — КПД ФЭП; k зап — коэффициент заполнения площади СБ; k Д — коэффициент деградации ФЭП; T САС — срок активного существования.
Среднее значение мощности СБ зависит от угла освещённости орбиты:
cos^ CB ) = cos( i )sin(e)sin(y N ) -
- sin( i )cos(e)sin(y N )cos(Q) +
+ sin( i )sin(Q)cos(y N), где i, Q — наклонение и долгота восходящего узла орбиты, соответственно; е = 23° 27' — угол между плоскостью эклиптики и плоскостью экватора;
g N = 0,9856 N 21 — угол в градусах, определяющий положение Солнца на эклиптике на текущий момент; N 21 — количество суток, отсчитываемых с 21 марта до текущего дня.
Масса системы электроснабжения (СЭС) равна сумме масс всех её элементов:
MСЭС = mАБ + mСБ + mКАС + mРФ + mПОР, где mАБ — масса аккумуляторных батарей; mCБ — масса панелей СБ; mКАС — масса комплекса автоматики и стабилизации; mРФ — масса меха-низов раскрытия и фиксации; mПОР — масса приводов ориентации.
Масса ЭРДУ буксира в основном определяется потребной величиной суммарного импульса тяги, который должен превышать суммарный импульс силы аэродинамического сопротивления за всё время его функционирования.
Для расчёта необходимо произвести декомпозицию ЭРДУ на следующие основные элементы [17]:
-
• рабочее тело ЭРД;
-
• система преобразования и управления (СПУ) электрической мощности;
-
• система хранения и подачи рабочего тела (СХП);
-
• электроракетный двигатель (ЭРД);
-
• комплекс обеспечивающих систем (КОС);
-
• конструкция ЭДС.
С учётом вышеуказанного разбиения ЭДС на составные элементы выражение для массы ЭРДУ можно представить следующим образом:
M ЭРДУ = М РТ + М СПУ + М СП +
+ МСХ + МДВ + МКОС + МК, масса ЭДС КА-буксира равна сумме масс ЭРДУ и СЭС
М ЭДС = М СЭС + М ЭРДУ .
Результаты расчёта массовых характеристик ЭДС, выполненные по методике [18], приведены в табл. 2. Как видно из расчётов, всем выдвинутым требованиям к ЭДС ТБ удовлетворяет ЭРД СПД-100В.
анализ использования эрб по сравнению с традиционными способами развёртывания ог мка
В качестве сравнения рассмотрим построение искомой ОГ из 24 КА в четырёх орбитальных плоскостях традиционным способом на основе запусков РН «Союз-2.1в» с РБ «Волга».
Построение ОГ требует учёта ограничений в виде массы полезной нагрузки, выводимой на низкую околоземную орбиту, обусловленной грузоподъёмностью РН; затрат по величине характеристической скорости РБ, а также — по количеству включений жидкостной ракетной двигательной установки (ЖРДУ).
Для построения ОГ КА требуется в каждой из четырёх плоскостей, равномерно распределённых по долготе восходящего узла, с наклонением ~63°, задаваемым РН, разместить шесть МКА. Для этого после выведения пакета ТБ на опорную орбиту высотой 200 км необходимо перейти на целевую орбиту высотой 600 км и построить относительно первоначальной три плоскости орбиты поворотом, соответственно, на 45; 90 и 135° с расстановкой МКА по точкам стояния. Рассмотрим решение этой задачи запуском РН «Союз-2.1в» с РБ «Волга».
Некоторые характеристики РБ «Волга» [19]:
конечная масса 890 кг;
тяга 300 кгс;
удельный импульс двигателя 307 с.
Таблица 2
результаты расчёта параметров эдС тб на основе эрд
|
Модель СПД |
Количество СПД, шт. |
Время перелёта, сут |
Площадь СБ, м2 |
Масса СЭС, кг |
Масса РТ, кг |
Масса ЭРДУ, кг |
Масса ЭДС, кг |
|
СПД-100В |
3 |
19,8 |
21,6 |
111,7 |
8,25 |
89 |
200,6 |
|
СПД-100Д |
3 |
17 |
23,9 |
123,5 |
7,6 |
92,6 |
216 |
|
СПД-140 |
2 |
7,9 |
46,8 |
241,8 |
11,2 |
155,8 |
397,5 |
|
СПД-1350 |
3 |
18,2 |
23,9 |
123,5 |
11,3 |
104,4 |
227,9 |
|
СПД-2300 |
2 |
15,6 |
36,1 |
186,6 |
4,4 |
173,2 |
360 |
Рассмотрим последовательность баллистических манёвров и оценим затраты на их выполнение. Величину гравитационных потерь ввиду их малости не учитываем.
Анализ баллистических операций с шестью МКА массой 250 кг, выводимых одной РН, показал, что ограничением при построении ОГ МКА являются грузоподъёмность РН и затраты характеристической скорости ДУ РБ.
C учётом этих результатов рассмотрим запуск трёх МКА одной РН «Союз-2.1в» с РБ «Волга» с размещением по рабочим точкам. После запуска первой РН производится компланарный перелёт РБ «Волга» с полезной нагрузкой из трёх МКА массой 250 кг каждый с опорной орбиты высотой 200 км на целевую орбиту 600 км. Затраты характеристической скорости оцениваются величиной А V хар1 [15] :
∆ V хар1
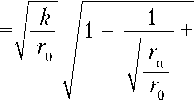
r 0
r ц где k = 398 600,44 км3/с2 — гравитационный параметр Земли; r0 — радиус-вектор опорной орбиты высотой 200 км; rц — радиус-вектор целевой орбиты высотой 600 км; А Vхар1 = 227 м/с.
В плоскости выведения производится установка трёх МКА по точкам размещения. Для этого первый из трёх МКА устанавливается на круговой орбите, затем к орбитальному модулю прикладывается первый ускоряющий импульс А V p , после которого он переходит на компланарную эллиптическую орбиту с перигеем в точке приложения импульса. Высота апогея эллиптической орбиты выбирается такой, чтобы через один виток орбитальный модуль оказался в перигее в момент времени, когда первый КА, оставшийся на круговой орбите, отстоял от перигея на угловое расстояние в 60°.
В точке перигея прикладывается тормозной импульс, равный по величине А Vp, и второй МКА устанавливается в заданную точку круговой орбиты. Одновременно к орбитальному модулю прикладывается ускоряющий импульс, равный А Vp, и он переходит на эллиптическую орбиту, в перигее которой рассмотренный манёвр с тормозным импульсом повторяется установкой третьего МКА. Все три МКА установлены по рабочим точкам в плоскости орбиты выведения РН. Выполнение операции требует шести включений ЖРДУ РБ. Заполнение плоскости второй тройкой КА производится после запуска второй РН с РБ и тремя МКА в первую плоскость, что достигается выбором времени запуска РН. При этом к моменту окончания перелёта на рабочую орбиту и установки четвёртого МКА он должен находиться на заданном угловом расстоянии от третьего МКА. Указанный манёвр обеспечивается выбором момента начала перелёта с опорной орбиты на рабочую. Установка пятого и шестого МКА производится аналогично описанной выше.
Формирование второй и последующих плоскостей ОГ производится выбором времени старта каждой РН с учётом долготы восходящего узла и других параметров первой плоскости, обеспечивающих поворот очередной плоскости на 45° относительно предыдущей. В каждой из полученных плоскостей устанавливается по шесть МКА. Таким образом, формируется ОГ из двадцати четырёх МКА по шесть МКА в каждой из четырёх плоскостей запуском восьми РН «Союз-2.1в» с РБ «Волга» и полезной нагрузкой из трёх МКА массой 250 кг.
Требуемые затраты характеристической скорости РБ для совершения перелёта и установки трёх КА А V РБ . определяются следующим образом:
А VРБi = А Vхар1 + А Vр, их значения приведены в табл. 3.
Таблица 3
Суммарные затраты характеристической скорости рб на установку трёх мка
|
Вид затрат характеристической скорости РБ |
Величина затрат характеристической скорости РБ, м/c |
|
Перелёт с опорной на орбиту высотой 600 км, А V хар1 |
227 |
|
Расстановка трёх МКА по точкам рабочей орбиты, А V р |
485 |
|
Суммарные затраты характеристической скорости РБ, А V рБ i |
712 |
Энергетические возможности РБ оцениваются величиной суммарного приращения характеристической скорости Δ V Σ в ряде последовательных включений, определяемой по уравнению Циолковского:
∆ V = – W ln 1 – ∆ m Σ ,
Σ m0
где W — удельный импульс маршевого двигателя РБ; ΔmΣ — запас рабочего тела, расходуемого на совершение всех манёвров; m0 — начальное значение массы РБ и полезной нагрузки перед первым включением двигателя.
Для варианта оснащения РБ «Волга» с массой полезной нагрузки 750 кг, запасом топлива 760 кг и удельным импульсом W = 3 070 м/с Δ V Σ = 970 м/с.
Массовые энергетические характеристики разгонного блока «Волга»: масса адаптеров 400 кг;
конечная масса РБ 890 кг;
масса топлива 760 кг;
масса полезной нагрузки 750 кг;
Δ V Σ 970 м/с.
Анализ табл. 3 и массовых энергетических характеристик РБ «Волга» показывает выполнение условий РБ по грузоподъёмности и требуемым затратам характеристической скорости для построения искомой ОГ запуском восьми РН «Союз-2.1в» с РБ «Волга».
Таким образом, сравнение предлагаемого и традиционного способов формирования указанной ОГ показывает, что применение КА-буксира, требующего запуска одной РН «Союз-2.1б», экономически предпочтительно.
заключение
-
1. Рассмотрена задача развёртывания в нескольких плоскостях орбитальной группировки малых КА с использованием ЭРБ — транспортных блоков с ЭРД, питаемых от СБ.
-
2. Смену плоскостей орбиты функционирования предложено формировать на основе учёта прецессии опорной орбиты из-за влияния нецентральности гравитационного поля Земли.
-
3. Определены требования к энергодвигательной системе ЭРБ с учётом работы системы на опорной орбите в процессе ожидания смены плоскости орбиты из-за влияния гравитационного поля Земли.
-
4. Выполнено концептуальное проектирование ЭРБ на основе ЭРД СПД-100В и арсенид-галлиевых солнечных батарей.
-
5. Показана возможность, при использовании четырёх ЭРБ на основе трёх ЭРД СПД-100В в качестве маршевых двигателей и арсенид-галлиевых СБ мощностью ~6,5 кВт каждая, осуществить примерно за 264 сут развёртывание на орбите 600 км в четырёх плоскостях орбитальной группировки из 24 малых КА массой ~250 кг каждый одним пуском РН среднего класса («Союз-2.1б»).
-
6. Формирование заданной ОГ из 24 КА массой 250 кг каждый в четырёх плоскостях на высоте 600 км традиционным способом требует запуска восьми РН лёгкого класса «Союз-2.1в» с РБ «Волга».
Список литературы Концептуально-проектные исследования электроракетного разгонного блока для развёртывания многоплоскостной орбитальной группировки малых космических аппаратов
- Локшин Б.А. Негеостационарные системы фиксированной спутниковой связи - состояние и перспективы развития // Электросвязь. 2018. № 2. С. 30-39.
- Ковтун В.С., Королёв Б.В., Синявский В.В., Смирнов И.В. Космические системы связи разработки Ракетно-космической корпорации «Энергия» имени С.П. Королёва // Космическая техника и технологии. 2015. № 2(9). С. 3-24.
- Локшин Б.А., Орлов Ю.Ю. Возможности предоставления новых услуг спутниковой связи на территории РФ, включая Арктическую зону // Технологии и средства связи. Специальный выпуск «Спутниковая связь и вещание -2018». 2017. № 6-2. С. 66-70.
- Бетанов В.В., Волков С.А., Данилин Н.С., Потюпкин А.Ю., Селиванов А.С., Тимофеев Ю.А. Проблемные вопросы создания многоспутниковых орбитальных группировок на базе малоразмерных космических аппаратов // Ракетно-космическое приборостроение и информационные системы. 2019. Т. 6. Вып. 3. С. 57-65.
- Макриденко Л.А., Волков С.Н., Ходненко В.П. Концептуальные вопросы создания и применения малых космических аппаратов // Вопросы электромеханики. 2010. Т. 114. С. 15-27.
- Данилкин А.П., Козлов В.А. Мировые тенденции развития малых спутников // Экономические стратегии. 2016. № 6. С. 136-150.
- ГК «Роскосмос». Разгонные блоки. [Электронный ресурс]. Режим доступа: https://www.roscosmos.ru/32/ (дата обращения 11.03.2021 г.).
- Мосин Д.А., Уртминцев И.А., Михайленко А.В., Северенко А.В. Способ развёртывания многоспутниковой орбитальной группировки малых космических аппаратов // Материалы 54-х Научных чтений памяти К.Э. Циолковского. Калуга: Изд-во «Эйдос», 2019. С. 82-86.
- Кувшинова Е.Ю., Акимов В.Н., Архангельский Н.И., Нестеров В.М. Сравнительный анализ технико-экономической эффективности применения многоразовых межорбитальных буксиров с ядерной электроракетной двигательной установкой и одноразовых химических разгонных блоков в транспортных операциях по доставке полезных грузов на окололунную орбиту // Космическая техника и технологии. 2016. № 3(14). С. 62-70.
- Башмаков В.Н., Корякин А.И., Кропотин С.А., Попов А.Н., Севастьянов Н.Н., Соколов А.В., Соколов Б.А., Сухов Ю.И. Методология создания и отработки электроракетной двигательной установки телекоммуникационных космических аппаратов «Ямал-200» (к 15-летию эксплуатации в космосе) // Космическая техника и технологии. 2019. № 2(25). С. 91-106.
- АО ОКБ «Факел». Продукция. Стационарные плазменные двигатели. [Электронный ресурс]. Режим доступа: https://fakel-russia.com/produkciya (дата обращения 11.03.2021 г.).
- Кинг-Хили Д. Искусственные спутники и научные исследования / Под ред. А.Г. Масевич. М.: Иностранная литература, 1963, 262 с.
- Левандович А.В., Мосин Д.А., Уртминцев И.А., Северенко А.В. Методика определения параметров корректирующей двигательной установки для малых космических аппаратов // Труды ВКА имени А.Ф. Можайского. 2018. Вып. № 661. С. 176-184.
- ГК «Роскосмос». Ракета-носитель «Союз-2». [Электронный ресурс]. Режим доступа: http://www.roscosmos.ru/468 (дата обращения 11.03.2021 г.).
- Власов С.А., Мамон П.А. Теория полёта летательных аппаратов: Уч. пос. СПб.: ВКА имени А.Ф. Можайского, 2007. 435 с.
- АО «Сатурн». Разработка солнечных, аккумуляторных батарей и оборудования для космических аппаратов. [Электронный ресурс]. Режим доступа: http://www.saturn-kuban.ru (дата обращения 11.03.2021 г.).
- Синявский В.В., Тютюкин А.Е., Мосин Д.А., Уртминцев И.А., Евдокимов Р.А., Левандович А.В. Энергетические установки космических аппаратов: Учебник / Под ред. проф. В.В. Синявского. Королёв: РКК «Энергия», 2019. 484 с.
- Никольский В.В. Проектирование сверхмалых космических аппаратов: Уч. пос. СПб.: Балт. гос. техн. ун-т., 2012. 59 с.
- ГК «Роскосмос». Разгонный блок «Волга». Режим доступа: http://www. roscosmos.ru/20069 (дата обращения 11.03.2021 г.).
