Конечноэлементная математическая модель динамики криволинейного трубопровода с пульсирующим потоком рабочей жидкости

Автор: Миронова Т.Б.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Механика и машиностроение
Статья в выпуске: 5-1 т.11, 2009 года.
Бесплатный доступ
В статье представлена конечноэлементная математическая модель в безразмерных параметрах, описывающая динамические характеристики пространственно криволинейного трубопровода при его силовом нагружении пульсирующим потоком рабочей жидкости. Рассмотрен частный случай решаемой задачи - вибрация трубопровода, ось которого лежит в одной плоскости, под действием стоячей волны в рабочей жидкости. Представлены результаты расчета по разработанной модели.
Трубопроводная система, динамические характеристики, пульсации рабочей жидкости, вибрация, конечноэлементная модель, колебания
Короткий адрес: https://sciup.org/148198684
IDR: 148198684 | УДК: 533.951
Finite element mathematical model of pipeline dynamics under force excitation by a pulsating flow
The finite element mathematical model of vibroacoustical characteristics of pipe system is developed. The model allows calculations of pipe characteristics under force excitation by oscillating fluid flow, including unsteady conditions. The pipe system can be of complex configuration. Results of calculation on the developed model are presented.
Текст научной статьи Конечноэлементная математическая модель динамики криволинейного трубопровода с пульсирующим потоком рабочей жидкости
Исследование динамических характеристик, процессов генерации и распространения колебаний в гидрогазовых систем с каждым годом привлекает внимание все большего числа ученых. Зарубежными и отечественными исследователями накоплен определенный опыт в данной научной области, разработаны математические модели динамических процессов в элементах и узлах систем. Однако все они обладают определенной долей идеализации, различными допущениями и ограничениями.
Ранее были разработаны математические модели процессов связанных колебаний жидкой среды и твердотельных элементов в элементарном объеме на границе раздела сред [3]. Однако данные модели слишком громоздки для решения задачи анализа виброакустических процессов в трубопроводах. Известна конечноэлементная модель динамики трубопроводов сложной пространственной конфигурации с пульсирующими потоком рабочей жидкости, созданная на базе использования программного комплекса ANSYS [1-2]. Недостаток данной модели заключается в ее высокой трудоёмкости. Указанный недостаток данной модели устранен в математической модели [3] Существенное сокращение вычислительной трудоемкости достигается при рассмотрении трубопровода с точки зрения механики стержней [4].
В настоящей работе разработана конечноэлементная модель, позволяющая рассчитывать в безразмерных параметрах виброакустические характеристики пространственно сложных трубопроводных систем при их силовом нагружении пульсирующим потоком рабочей жидкости и кинематическом возбуждении со стороны присоединенных агрегатов и систем.
де конечных элементов (МКЭ), т.к. метод конечных разностей (МКР) считается недостаточно эффективным и в значительной мере устаревшим. МКЭ по сравнению с МКР требует меньше машинных ресурсов (меньше оперативной памяти), расчет идет быстрее (меньше затраты процессорного времени), результат расчетов более адекватен. Преимуществом конечноэлементной модели перед конечно-разностной является также возможность внедрения разрабатываемых конечных элементов в современные универсальные CAE-системs, такие как Ansys, Nastran, Patran, Cosmos и др. что позволяет расширить их элементную базу, а также в частности решать задачи моделирования виброакустичес-ких характеристик трубопроводных систем с пульсирующим потоком рабочей жидкости в комплексе с анализом динамической нагружен-ности присоединенных агрегатов и систем, анализом технического объекта в целом.
Система уравнений, описывающая малые колебания пространственно криволинейных трубопроводов с осевой линией, лежащей в одной плоскости, при их силовом нагружении пульсирующим потоком рабочей жидкости и кинематическом возбуждении со стороны присоединенных агрегатов и систем записывается в виде [3]:
1 д u u 2 =— — ,
Х з d e
2 6 2 u 1 д 4 u 1
^3 St 2 де2дт 2
д4 u, 2
- nw ^T-- nWХ з де от
д 2 u 1 дедт
-
SUj 1
д е 6
-
( p + nw 2 +
2 х 2 г' Х з )д е 4
-
^ (1)
-
Ф з =
\ 2 4\д2 U, 2 д w
) Хз + Хз ) —т = nwX 3 — д е д т
1 д 2 и 1
Х з д е 2
+ Х з u 1
д w
-
nw , д е
где 8 - безразмерная координата, отсчитываемая вдоль линии центров тяжести сечения трубопровода от начала отсчёта до некоторого произвольного поперечного сечения; т - безразмерное вре
мя; n = —m^2 —; m .(s ) - погонная масса трубо- m 1 + m2
провода; m2 ( s ) - погонная масса рабочей жидкости в трубопроводе; c3 – кривизна осевой линии в плоскости, перпендикулярной e 3 ; e3 ( s,t ) - единичный вектор, направленный по бинормали к осевой линии трубопровода; e 1 ( s, t ) – единичный вектор, направленный по касательной к осевой линии трубопровода; ё2 ( s,t ) - единичный вектор, направленный по нормали к осе-
вой линии трубопровода; l – длина трубопровода; w – вектор безразмерной скорости рабочей
жидкости; p – безразмерное давление; u1 – виб роперемещение в направлении e 1 ( s,t ) ; u2 - виб роперемещение в направлении e ] ( s,t ) .
Выражения для мгновенных значений коле
-
-
-
бательных составляющих давления и скорости рабочей жидкости в рассматриваемом случае гармонических колебаний в безразмерных величинах давления и скорости рабочей жидкости,
представлены в виде (в левой части приведенных ниже равенств - безразмерные величины, а в правой – размерные, кроме t ):
ными производными заменяется системой обыкновенных дифференциальных уравнений [5]. Полученная система решается повторной дискретизацией по времени.
Аппроксимация uˆ 1 для решения u1 с помощью метода частичной дискретизации записывается в виде:
м - 1
u i * u i = Z ° -( T ) N. ( 8 ) , (3)
m = 0
где N m ( 8 ) – базисные функции. При этом N m ( 8 ) не обязательно удовлетворяет всем краевым условиям.
Аппроксимирующее уравнение по методу взвешенных невязок в общем виде записывается:
J WRQdQ +J WRdF = 0,(4)
Q du1d где Rq = Lu1 + P —^™: P , 2 - невязка апп-dTdT роксимации по области, RF = Mu1 + r - невязка аппроксимации в краевых условиях, Wl ,Wl -линейно независимые весовые функции.
С учетом приведенных соотношений перепишем второе уравнение системы (1) в виде:
2 n fl ( 1 - 8 )
cos2
*т ) =-- C^^o1» ;*‘1‘т I
'У* АззA33
cos—— 33 V ’
Г d6Z/j / 2 T 2 ^34Z/j
J (^-6- + ( p + nw + 2 Х зо ) ^-4- +
^ d s d s
О u 1 d s 2
2 d w nw Z 30 — + OT
. 2f ( 1 - 8 ) sin
/ \ c pj m , + m2 . _„2 m , + m2
wst) =-----C^^-вх- —---2 sin 2nfl —-т
V ’ 2f pc\ A„ cos—~ ' 33 V '
d w 2 d 2 u d 4 u
+ nw--x30 —2" +--2—2 + ds дт2 ds 2дт2
d u, + nw--;-- ds 3дт
d 2 z/.
+ nW % 30^L)Wld s = 0 dsdT
Данные выражения справедливы только до частот, ниже частоты первого акустического четвертьволнового резонанса, когда колебания всех частиц невязкой жидкости в стоячей волне происходят софазно.
Рассмотрим схему решения второго уравнения системы (1). Данное уравнение является линейным нестационарным дифференциальными уравнением. Его можно записать в общем виде [5]:
du d 2 u
LU 1 + p - a--- P —1 = 0 , на Q , (2)
d T d T
Используем аппроксимацию по Галеркину. В этом случае вместо привлечения новой системы функций в качестве весовых множителей выбираются сами базисные ф у нкции:
W l = N l и W l = - N l на F .
Подставим аппроксимацию uˆ 1 в уравнение (5) и запишем полученную систему дифференциальных уравнений в векторной форме:
[ M ] ^ d 2 ^ ^ l + [ c ] ^ dU l + [ K ][ U ] = [ f ] ; (6)
T т
Здесь компоненты отдельных матриц и правой части определяются равенствами:
где L – линейный оператор, включающий дифференцирование только по пространственным переменным, p, a , P - заданные функции координат и времени, Q - пространственная область.
Для решения данного уравнения применим метод частичной дискретизации, при котором исходное дифференциальное уравнение с част-
Mim = 11 d^Nm - X3oNm INids 0 V ds
C im = h- w f d 3 N m + z 30 dN m 1 Nd s
0 V ds3
1 f d6N d4N
K m = fl —pr + (2 Х 2о + P + nwHH m +
0 V ds
, d2N .
■+ (Хзо + P + nw )Хзо m INlde de J
N =— —43 ( § 6 — — § — 10 § 4 + 20 § 3 + 2 § 2 — — § ).
1 40 3 9 27 9 27 ;
, г Id w 5 w 1
f l = n X 30 H-- w ^- I N l d e 0 V0T 8e J
В общем случае аппроксимация uˆ1 на эле менте с P + 1 узлами будет сводится к многочле ну степени p . На таком элементе узлы которо
-
-
-
N 4 =
N e =
N 3e
|
243 6 H§ |
— 2 § 5 — 3 |
23 § 4 9 |
+ 23 § 27 |
|
81 6 — —( § " |
- 24 § 4 + 9 |
^§2 81 |
— 4). 81 ; |
|
243 6 :-----(§ 16 |
+ 2 § 5 • 3 |
- 23 § 9 |
4 13 ^^^^^^^^^b 27 |
§ + 4 § + — §);
9 27 ;
:3 + 22 § 2 — — § )■
27 27 ;
го с номерами от 0 до p помещены в точки е 0 , ef , е2 , ^, eP — f , eP , ассоциируемая с узлом l . Базисная функция элемента Nl будет многочленом степени p , принимающим значения нуль во всех других узлах элемента.
N‘ =— 243( § 6 + — § — 10 § 4 — 20 § 3 + 2 § 2 +— § ) •
5 40 3 9 27 9 27 ;
В уравнение (5) входит производная 6 поряд ка. Следовательно, для получения точного реше ния базисные функции, входящие в аппроксима цию должны иметь 6 порядок или выше. Это не
-
-
-
-
обходимо для выполнения требования полноты системы базисных функций, позволяющей им с любой степенью точности аппроксимировать неизвестную функцию [5]. В качестве базисных функций удовлетворяющих данным условиям возьмем многочлен Лагранжа степени p = 6 [5] N e = 4 = [( e — e X е — e )”( e - e i - 2 X e — e i + 2 )-( e — e p )] x x [( e i — e o X e l — e f ХД ^ — e i - f X e l — e i + f ) •" ( e i — e p )]
Запишем базисные функции для одного се миузлового элемента. Выразим их через норми рованную локальную координату § , определя емую равенством:
-
-
-
§ = 2( е — ес) he
.
Здесь еес - координата центра элемента, h e – длина элемента. Элемент принадлежит отрез-
ку — 1 < § < 1 :
N e = 8L( § 6
0 80
^^^^^^
§ 5 — 5 § 4 + 5 § 3 + — § 2 — — § );
9 9 81 81 ;
N e = 82( § 6 + § 5 — 5 § — 5 § + — § 2 + — § )
6 80 9 9 81 81 .
Полученные базисные функции представле ны на рис. 1.
Запишем систему уравнений (7) через нор
-
-
мируемую локальную координату § . Получим:
M m = J |
- f
2 d2N„ 2 h e 1
--m — Хз N„ I Nd e h d § 30 2 m J l
/
V
1 2^
i d§3
+ X2» — J Nde •
30 d § J l ’
= f ff 2 1 5 d6N f + .2Z, + р + nw)2 1 ' dN + (И)
m J ( he J de6 3030 \K) de4 ( )
V
2 1
■ + (Z* + P + nw )XM I I d—f-
30 F ,Л30 ( h e J d e J
N l d e ;
.
1 Idw 5 w 1 he f= nX30 H— w^- hr Nld§ 0 V 5т tie J 2
Систему уравнений (11) будем решать мето дом базисных функций. Для представления вре менной области, которая считается продолжаю
-
-
-
щейся до бесконечности, используем конечные элементы. Условия на конце первого элемента определяются с помощью дифференциального уравнения и начальных данных. Затем этот про-
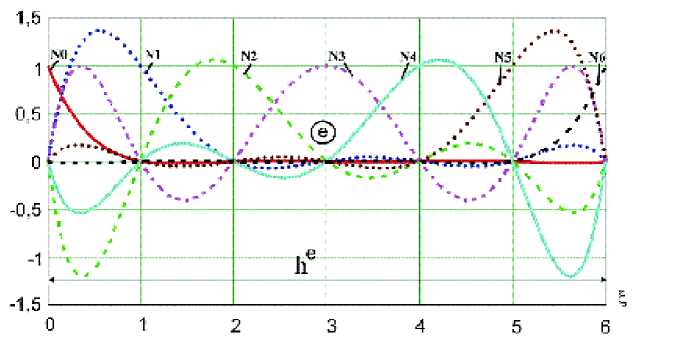
Рис. 1. Одномерный элемент и ассоциируемые с ними стандартные базисные функции шестой степени
цесс повторяется для последующих элементов с использованием вновь вычисленной информации в качестве начальных данных для каждого очередного элемента. Пусть да a «a _£tt„Nm(T) . (12)
m _ 1
Базисные функции N m ( t ) должны иметь степень не ниже второй, так как в уравнение (6) входят вторые производные по времени.
Возьмем типичный квадратичный элемент n по времени с тремя узлами, помещенный в точки T 2n - T 2n + 1 - T 2n + 2 (см. Рис. 2, 3).
На этом элементе n имеем a = a2-^ + a2+1Nnn+1 + a2n+2Nnn+2. (13)
Тогда как все остальные базисные функции на элементе n равны нулю. Здесь
[ м+YWt n ) + PtKA n ) R n " 2 +
+ [ - 2 M +(1-2^0^ ) ЧШ-2р+УХ KAt „ ) ] a 2 ^ + (16) + [ м-Ц-.-^ б сСХб», ) + (1/2 + p-y)At n K(At n ) Ь 2 n _ f n At n
Интерполируя f тем же самым способом, что и a , получим fn _ Pf22+2 + (1/2—2P+Y )f2n+1 + (1/2+P—Y )f2n .(17)
Рассмотрим частный случай краевых условий – жесткую заделку концов трубопровода. В этом случае при £ _ 0 и £ _ 1 u1 _ u2 _ 0 . Тогда из первого уравнения системы (1) следует, что d u1 d£
0 , а из третьего уравнения d 2u, ”£?
_ 0 . Опу-
стим индекс 1 у параметра u .
Для рассматриваемой конечноэлементной модели граничные условия можно записать в виде
N _ - T(1 - T) , dN^ _ — 1/2 + T .
2n 2 ’ dT Atn ’ d2N2n _ 1 n 2 dN2n+1 __ 2T dT2 Atn ; N2n+1 =1 T ; dT Atn ’
M _ 1
2 Um _ 0
m _ 0
m — 1 d U
2 m _ 0 при £ _ 0 и £ _ 1 . (18)
m _ 0 d£
M -1 d^ U m
2 0 Bs2
_ 0
d2N”nn ___2_ _t( 1+T). dN2n+2 __ 1/2+T dT2 д2 ’ 2n+2 2 ’ dT Atn d2N2n+2 _ 1 T _ t — t2n+1 _ _ .
d T 2 A t n ; A t n ’ A tn _T 2n + 2 T 2n + 1 ;
A tn T 2n + 1 T 2n
Распишем последние два уравнения системы (18), подставив в них аппроксимацию (3) и учитывая, что перемещение в узлах на границе a0 и a6 , а также базисные функции N1 , N2 , N3 , N4 , N5 в граничных точках равны нулю a0 _ 0 и a6 _ 0 , получим
Применение к уравнению второго порядка (6) стандартного метода взвешенных невязок дает
2n + 2
2ˆ ˆ f M + C— + Ka _ f W„dT _ 0. (15)
T n ( d T 2 d T J) n
T
, 2 + + 2
n _ 0,1,2,...
Здесь интегрирование производится только по элементу n , поэтому в полученном выражении можно подставить для aˆ значение (13). Учтем, что матрицы C и K зависят от времени. Тогда в силу (14) уравнение метода взвешенных невязок после соответствующих преобразований принимает вид
0 1 2 3 4
в---•---e---•----e•—
T,=0 T, T, 7, 7,T,
I CD I CD I CD
• - внутренние узлы элементов, О - граничные узлы элементов
Рис. 2. Разбиение временной области на квадратичные конечные элементы
5 ^ 1 (0) 5 N 2 (0) , 5 N 3 (0) ,
Mi a о
1 ^ 2 ^3
08 0808
5 N (0) 5 N (0) n
+ a 4/-J- + a. — _ 0
4 58 5
5 N (1) 5 N (1) 5 N (1)
a 1 +a 2 +a 3
58 585
5 N (1) 5 N (1) n
+ a4 4^ + a._
4 58
5 2 N , (0) 5 2 N 2 (0) 5 2 N 3 (0)
a 1 5 8 2 + a 2 5 8 2 + a 3 5 8 2 +
52 N (0) 52 N (0)
+ a4---- 4г^ + a=, ----5r^ = 0
4 582 5
5 2 N (1) 5 2 N (1) 5 2 N 3 (1)
1—2-^-3-^- aaa
1 582 2 5823
5X0) 5 X 0) _0
aa
4 582 5
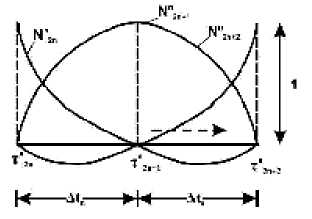
Рис. 3. Базисные функции элемента n
зации по времени At = —. В качестве начальных данных в рассматриваемой трехслойной схеме для начала вычислений требуются начальные данные, которые задаются в виде da
a( T = 0) = a0 = 0 , "^(t = 0) = 0 . (21)
Для определения a1 применим стартовую ко-
Таким образом имеем 4 уравнения и 5 неизвестных величин a 1 , a 2 , a3 , a 4 , a5 . a3 находим из уравнения (6), которое для случая одного элемента можно записать в виде
[ М зз f dU !• [ ' ■"f dU 1+ [ KU ] = f ] . (20) d r J d T J
Необходимо отметить, что изменение граничных условий не приводит к перестройке конечноэлементной схемы решения. Выражения (11) для внутренних узлов элемента остаются прежними. Изменяется только вид уравнений системы (19), описывающих граничные условия. В конечно-разностной модели изменение граничных условий приводит к перестройке схемы решения, что увеличивает трудоемкость получения результатов расчета по сравнению с предложенной конечноэлементной моделью.
В качестве модельного примера возьмем трубопровод со следующими параметрами: l = 0,4м ; d = 0,004м ; 5 = 0,0006м ; p = 7800кг / м3 , E = 2 • 1011 Па ; R = 0,23м ; где d - наружный диаметр трубопровода, 5 - толщина стенки трубопровода; R – радиус кривизны.
Предположим, что в начальный момент времени деформация трубопровода отсутствует и он находился в состоянии покоя. Затем трубопровод нагружается установившимися колебаниями рабочей жидкости в которой реализуется стоячая волна с параметрами f = 250Гц, р х = 10 5 Па. Характеристики рабочей жидкости: Р ж = 870кг/м3 , с = 1300м/с.
При проведении расчётов возьмем один семиузловой элемент и постоянный шаг дискрети- da a - a нечно-разностную схему —- =------ dt At
, где i – со-
ответствующий временной слой.
Для того, чтобы полученная схема была безусловно устойчивой необходимо, чтобы значения в и Y удовлетворяли условиям
Список литературы Конечноэлементная математическая модель динамики криволинейного трубопровода с пульсирующим потоком рабочей жидкости
- Макарьянц Г.М., Прокофьев А.Б., Шахматов Е.В., Шестаков Г.В. Исследование виброакустических характеристик трубопровода при его силовом нагружении с использованием программного комплекса ANSYS//Сборник трудов четвертой конференции пользователей программного обеспечения CAD-FEM Gmb H. М.: Полигон-пресс, 2004. С. 280-287.
- Макарьянц Г.М. Разработка методик расчета и исследование виброакустических характеристик трубопроводных систем. Дисс... канд. техн. наук. Самара: СГАУ, 2004. 191 с.
- Прокофьев А.Б. Разработка метода комплексного анализа динамики и прочности трубопроводных систем с гасителями колебаний рабочей жидкости. Дисс... докт. техн. наук. Самара: СГАУ, 2008. 191 с.
- Светлицкий В.А. Механика стержней. М.: Высшая школа, 1987. 304 с.
- Зенкевич О., Морган К. Конечные элементы и аппроксимация/М.: Мир, 1986. 318 с.
- Бабаков И.М. Теория колебаний. М.: Дрофа, 2004. 591 с.
