Коррекция динамической погрешности измерительных преобразователей на основе сплайн-аппроксимации сигнала

Автор: Ланге П.К.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Управление и моделирование
Статья в выпуске: 1 т.5, 2003 года.
Бесплатный доступ
Рассмотрен метод коррекции динамической погрешности инерционных измерительных преобразователей с передаточной функцией 1-го порядка с использованием параболической сплайн. аппроксимации дискретных значений сигнала, а также его первой производной.
Короткий адрес: https://sciup.org/148197721
IDR: 148197721 | УДК: 621.372.542
Correction of a dynamic error of measuring converters on a base of signal spline approximation
The method of correction of a dynamic error of inertial measuring converters those have 1-st order transfer function by using parabolic spline - approximation of discrete signal sampling and also by its first derivative is considered.
Текст научной статьи Коррекция динамической погрешности измерительных преобразователей на основе сплайн-аппроксимации сигнала
Самарский государственный технический университет
Рассмотрен метод коррекции динамической погрешности инерционных измерительных преобразователей с передаточной функцией 1-го порядка с использованием параболической сплайн ‒ аппроксимации дискретных значений сигнала, а также его первой производной.
Динамическая погрешность, присутствующая при измерениях ряда параметров в динамическом режиме, существенно искажает получаемую с первичных измерительных преобразователей (ИП) информацию. Особое значение эта проблема имеет в тепловых измерениях, где используются инерционные преобразователи.
Динамическая погрешность зависит от постоянной времени ИП, а также скорости изменения измеряемой величины и может быть скорректирована с использованием аппаратных и программных методов.
Применение аппаратных методов сопряжено с решением ряда проблем. Снижение динамической погрешности путем уменьшения по стоянной времени ИП, как правило, снижает его надежность и долговременную стабильность. Кроме того, уменьшение тепловой инерционности ИП связано со значительными технологическими трудно стями.
В связи с этим все большее распространение получает коррекция динамических погрешностей с использованием программных методов.
В ряде случаев коррекция динамической погрешно сти представляет собой об- ратную задачу [1], то есть задачу восстановления входного сигнала по известной информации об операторе А (аппаратной функции) ИП.
Рассмотрим задачу измерения мгновенных значений параметра x(t), который преобразуется ИП в сигнал y(t) , формируемый на его выходе (рис.1).
При динамических измерениях, как правило, интерес представляет не выходной сигнал ИП y(t) , а параметр x(t) . Поэтому задачей обработки результатов измерений является определение значений параметра x(t) по выходному сигналу y(t) и оператору А , описывающему динамические свойства ИП, что представляет собой решение задачи коррекции его аппаратной функции. Наиболее просто такая задача решается реализацией оператора А-1 , обратного оператору А , с использованием корректирующего звена КЗ (рис.1) в аппаратном или программном виде, который обрабатывает сигнал y(t) . Однако по сущности своей такая задача является некорректной, поскольку обратный оператор должен реализовывать функцию предсказания сигнала, что физически реализовать невозможно [1].
В связи с этим корректное решение
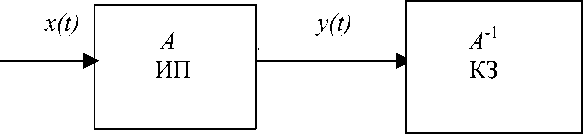
Рис.1. Структурная схема тракта прохождения сигнала
z(t)
обратной задачи при измерениях динамических параметров может быть выполнено, если предусмотреть определенное запаздывание в формировании значений сигнала z(t) на выходе корректирующего звена, что не требует реализации функции предсказания.
В наиболее распространенном случае инерционный ИП имеет передаточную функцию, соответствующую передаточной функции апериодического звена первого порядка
мации.
Коэффициенты пятиточечной парабо-личе ской сплайн‒функции, аппроксимирующей сигнал y(t) по его дискретным значениям, определяются следующими выражениями [2]:
a 0
[п ]= X
— x [ п — 2 ] + 4 x [ п —1] +
^+ 10 x [ п ] + 4 x [ п + 1 ] — x [ п + 2 ]
a 1 [ п ] = 1/8
< x [ п — 2 ]— 6 x [ п — 1 ]+ 2 ^+ 6 x [ п + 1 ] — x [ п + 2 ]?
W (p ) = yM = -K x (p) Tp +1 ’ где Т ‒ по стоянная времени ИП.
При К =1 передаточная функция корректирующего звена принимает вид
W "'
Tdy ) + У ( t ) = z ( t ).
dt
Таким образом, это звено должно реализовать функцию дифференцирования сигнала y ( t ) и сложения его производной с самим сигналом (рис.2).
Для решения такой задачи предлагается использовать цифровой фильтр, реализующий сплайн‒аппроксимацию дискретных значений сигнала y ( t ), а также его производной.
При использовании параболической сплайн ‒ аппроксимации на n -м дискретном участке сигнал описывается параболической функцией (рис.3)
a 2 [ п ] = 1
< — x [ п — 2 ] + 7 x [ п — 1 ] — 6 x [ п ]
—
16 ^— 6 x [ п + 1 ] + 7 x [ п + 2 ] — x [ п + 3 ] "
Коэффициенты пятиточечной парабо-личе ской сплайн‒функции, аппроксимирующей производную сигнала y(t), определяются выражениями [2]:
b 0 [ п ] = Ц2 ( x [ п — 2 ] — 8 x [ п — 1 ] + 8 x [ п + 1 ] — x [ п + 2 ] ) , b 1 [ п ] = 16 ( — x [ п — 2 ] + 10 x [ п — 1 ] — — 18 x [ п ] + 10 x [ п + 1 ] — x [ п + 2 ] ) , (3)
b 2 [ п ] = Ц2 ( x [ п — 2 ] — 9 x [ п — 1 ] + 22 x [ п ] — — 22 x [ п + 1 ] + 9 x [ п + 2 ] — x [ п + 3 ] ) .
Таким образом, сигнал на выходе корректирующего звена должен иметь вид z (t) = c 2[ п ] t2 + c1[ п ] t + c 0[ п ], (4)
где c0[п] = a0 [п] + T ■ b0 [п] , c1[ п ] = a1 [п ] + T ■ b1 [п ], (5)
У п ( t ) = a 2 [ п ] t 2 + a x [ п ] t + a 0 [ п ] , (1)
где a2 , a1 , a0 ‒ коэффициенты аппрокси-
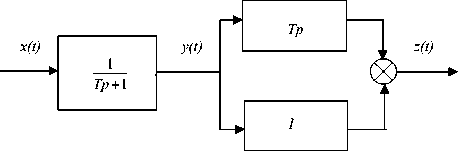
Рис.2. Структурная схема корректирующей цепи
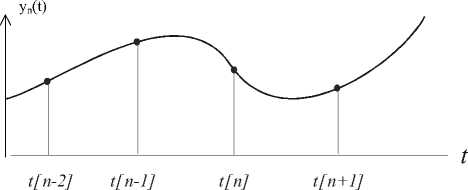
Рис.3. Аппроксимация выходного сигнала измерительного преобразователя параболической сплайн - функцией
c2[n] = a2 [n] + T■ b2 [n].
При t =0 из (8) следует:
z(n) = c0[n] = a0 [n] + T ■ b0 [n]. (6)
Как видно из (3), сигнал z(t) на выходе корректирующего звена формируется с задержкой в 3 дискретных интервала.
Выражение (4) определяет сигнал на выходе корректирующего звена, который в идеальном случае (при отсутствии погрешностей) должен повторять по форме сигнал x(t) .
Использование сплайн‒аппроксима-ции позволяет определить значения сигналов y(t), z(t) внутри интервалов дискретизации, что является достоинством рассмат- риваемого метода.
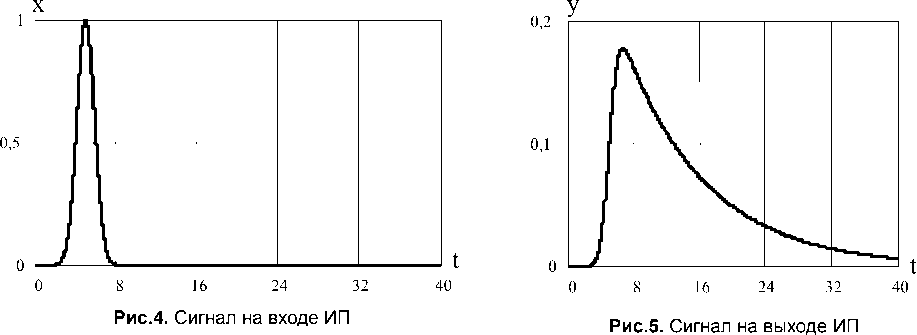
Рассмотрим в каче стве примера прохождение через описанную корректирующую цепь, изображенную на рис.1, единичного сигнала Гауссовой формы (рис.4)
(t - 5)\ x(t) = exp[-v 7 ].
.
При передаточной функции ИП
W (p ) = —1—
Tp +1 , его переходная характеристика определя- t ется выражением h(t) = (1 - e T).
Выражение для сигнала y(t) на выхо-
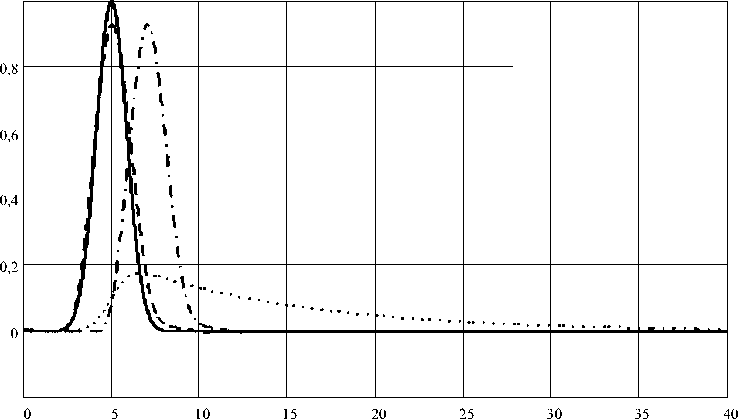
Рис.6. Диаграммы сигналов сигнал x(t) на входе первичного преобразователя сигнал y(t) на выходе первичного преобразователя сигнал z(t) на выходе корректирующего фильтра сигнал z(t-2)
де ИП может быть получено с использованием интеграла Дюамеля:
t
1 г
у(t) = -| exp(-T 0 L
( t - т - 5) 2
1.5
т
) exp ( - т ) dT .
Для конкретного значения постоянной времени Т =10с передаточной функции ИП график этой функции изображен на рис.5.
При аппроксимации сигнала y ( t ) сплайн ‒ функцией с использованием выражений (2) ‒ (3) для коэффициентов аппроксимации, а также выражений (4) ‒ (5) определяется функция сигнала z ( t ) на выходе корректирующего звена.
Эти функции изображены на рис.6, при рассмотрении которого видно, что рассмотренное корректирующее звено доста- точно эффективно восстанавливает по форме сигнал x(t), действующий на входе инерционного ИП, с запаздыванием в 3 интервала дискретизации.
