Коррекция наведения авиационной оптико-электронной станции при проведении поисковых работ

Автор: Маркелов Владимир Владимирович, Гурьянов Андрей Владимирович, Шукалов Анатолий Владимирович, Костишин Максим Олегович, Жаринов Игорь Олегович, Нечаев Владимир Анатольевич
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Авиационная и ракетно-космическая техника
Статья в выпуске: 1-2 т.19, 2017 года.
Бесплатный доступ
Рассматривается способ проведения коррекции углов наведения оптико-электронной станции, размещенной на летательном аппарате, при проведении поисковых работ. Коррекция осуществляется с использованием визуально видимого ориентира с известными координатами местоположения. Представлена методика осуществления коррекции углов наведения авиационной оптико-электронной станции по удаленному ориентиру коррекции. Коррекция включает в себя определение поправок к курсовому углу и углу места положения линии визирования. Поправки определяются как разница между расcчитанными по информации спутниковой навигационной системы и измеренными углами визирования выбранного ориентира. Коррекция углов наведения оптико-электронной станции по удаленному ориентиру в процессе осуществления поисковых работ призвана компенсировать ошибки измерений углового положения летательного аппарата и ошибки размещения станции на летательном аппарате, что, в конечном счете, обеспечивает повышение точностных характеристик при определении координат объекта поиска и наведении на него.
Оптико-электронная станция, углы визирования, определение местоположения
Короткий адрес: https://sciup.org/148205052
IDR: 148205052 | УДК: 629.051
Correction of the aviation optical-electronic station targeting at carrying out the search works
The way of carrying out the targeting angles correction of the optical-electronic station placed on the aircraft when carrying out search works is considered. Correction is carried out with use the visually visible reference point with the known coordinates of location. The technique of implementation the correction of targeting angles of the aviation optical-electronic station on a remote reference point of correction is presented. Correction includes definition to a course corner and a corner of the position of the vising line. Corrections are defined as a difference between the angles of vising of the chosen reference point calculated according to a navigation satellite system and measured one. Correction of targeting angels of the optical-electronic station on a remote reference point in the course of implementation of search works is intended to compensate errors of measurements of angular position of the aircraft and an error of placement of the station on the aircraft that, eventually, provides increase in precision characteristics when determining coordinates of a subject to search and aiming at him.
Текст научной статьи Коррекция наведения авиационной оптико-электронной станции при проведении поисковых работ
Нечаев Владимир Анатольевич, старший преподаватель кафедры Машинного проектирования бортовой электронно-вычислительной аппаратуры. E-mail: nil-
Использование ОЭС лазерного дальномера в принципе нивелирует величину ошибки определения координат. Но в ряде случаев применение дальномера ограничено, и координаты объекта могут быть определены только угломестным способом. Существенное влияние на ошибочное определение координат объекта оказывает ошибка определения угла места визирования ОЭС. В частности, при определении координат без использования лазерного дальномера (например, малозаметного объекта на водной поверхности) с высоты 1 км и на дальности 6 км, ошибка в определении угла места величиной до 10 влечет за собой ошибку в определении координат порядка 0,7 км [10, 11].
Для компенсации ошибок установки ОЭС на летательном аппарате предусмотрено проведение штатной наземной юстировки и настройки, однако данные мероприятия не учитывают возможные погрешности, возникающие в полете в виде деформации конструкции и узлов крепления станции. Также не учитываются погрешности бортовых систем измерения курса и вертикали [12, 13]. Вместе взятые неучтенные погрешности и влекут за собой появление ошибки в определении углов линии визирования. А с учетом того, что ОЭС является измерительным инструментом повышенной точности, даже незначительные ошибки в ее измерениях могут привести к заметной потере качества выполнения целевой задачи. В качестве одного из методов уточнения углов наведения ОЭС в полете предложен вариант коррекции ее углов наведения по удаленному ориентиру в районе проведения поисковых работ.
-
1. Коррекция углов наведения ОЭС. Коррекция углов наведения ОЭС по удаленному ориентиру в районе проведения поисковых работ предполагает наличие постоянной коррекции местоположения летательного аппарата по спутниковой навигационной системе и визуальную видимость указанного ориентира. Коррекция осуществляется в горизонтальном полете. При коррекции углов наведения ОЭС обеспечивается определение расчетных углов визирования ориентира коррекции, определяемых по известным координатам ориентира и летательного аппарата, и их сравнение с текущими, измеренными ОЭС, углами. Принимается, что размещение ОЭС на летательном аппарате обеспечивает привязку ее системы координат к системе координат летательного аппарата таким образом, что нулевые углы визирования станции соответствуют направлению продольной оси летательного аппарата. Коррекция углов наведения предполагает определение ошибок по углам в связанной системе координат летательного аппарата: по курсу, тангажу и
- крену. При этом курсовая ошибка определяет погрешность наведения ОЭС по курсовому углу, а ошибки по углу крена и тангажу — погрешность по углу места.
При дальнейшей после коррекции работе ОЭС в поисковом режиме, поправки, определенные как ошибки углов наведения, используются при формировании углов визирования. В этом случае расчетные углы положения линии визирования, включающие в себя угол места е и курсовой угол в, определяются как:
е = e*+(AucosP+AysinP), в = в*+Аф, где е*, в* - измеренные значения по углу места и курсовому углу соответственно, Аф, Au, Ay - поправки по курсовому углу, углу тангажа и углу крена соответственно, определенные при коррекции углов наведения ОЭС. Процесс использования коррекции углов наведения ОЭСв полете показан на рис. 1.
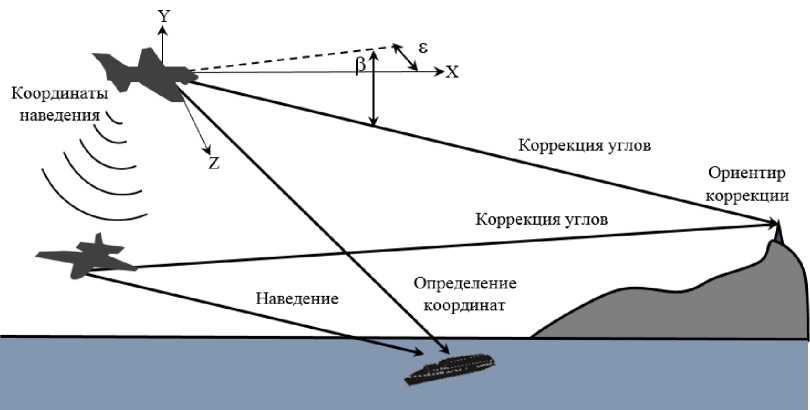
Рис. 1. Применение коррекции наведения авиационной ОЭС при проведении поисковых работ
Методически коррекция углов наведения ОЭС включает в себя следующие этапы:
-
- выбор ориентира для коррекции;
-
- автоматическая отстройка линии визирования ОЭС по расчетным углам на ориентир;
-
- при необходимости, ручная коррекция оператором совмещения линии визирования и ориентира;
-
- запоминание поправок на углы визирования;
-
- визуальный контроль положения линии визирования на ориентире после проведения коррекции.
-
2. Расчет поправок на положение линии визирования. При коррекции углов наведения ОЭС рассматриваются два вида ошибки: ошибка по курсовому углу и ошибка по углу места. Очевидно, что ошибка по курсовому углу включает в себя курсовую ошибку летательного аппарата и, собственно, ошибку установки ОЭС. Ошибка по углу места в
свою очередь включает в себя ошибки измерения углов крена и тангажа летательного аппарата, а также ошибку установки ОЭС относительно плоскости строительной горизонтали. С учетом медленно меняющихся ошибок ориентации и курса летательного аппарата, вычисляемые поправки на положение линии визирования в состоянии компенсировать все указанные ошибки в течение как минимум десятков минут с момента их определения. В качестве ориентира коррекции выбирается контрастный, хорошо распознаваемый ориентир с известными координатами и высотой. При этом важным критерием выбора ориентира является дальность до него. Минимальное значение дальности выбирается из условия минимизации ошибки, вносимой измерением высоты летательного аппарата.
Величина погрешности, вносимая ошибкой измерения высоты Аа определяется как:
Аа = SAH / (S-H(H+AH)), где S - горизонтальное расстояние до ориентира, Н - вертикальное превышение летательного аппарата над ориентиром, АН - расчетная ошибка определения высоты летательного аппарата.
Для получения удовлетворительных результатов измерений величина погрешности, вносимая ошибкой измерения высоты, должна составлять до 5 угловых минут. Таким образом, например, при допустимой погрешности по углу места до 5 угловых минут и ошибке измерения высоты ±12 м, дальность до ориентира должна быть не менее 6 км.
При известных взаимных геодезических координатах и высотах летательного аппарата и ориентира коррекциипутем решения классической обратной геодезической задачи в пространстве определяются декартовы прямоугольные топоцентриче-ские координаты ориентира в системе координат летательного аппарата: Z o , n o , Z o - Где ось Z направлена по нормали к поверхности земного эллипсоида, ось Z лежит в плоскости меридиана и направлена на север, ось n перпендикулярна осям Z и Z и направлена в сторону увеличения долготы [2]. Далее, с учетом положения летательного аппарата в пространстве, определяются углы визирования ориентира в связанной системе координат, где ось X направлена вдоль продольной оси летательного аппарата, ось Y - вверх, а ось Z дополняет систему координат. С учетом малости значения угла крена и тангажа в горизонтальном полете:
X = Z o COSф+Z o u+n o sinф ,
Y = Z o (-ucosф-YSinф)+Z o +n o (-usinф+YCOSф) ,
Z = Z o (uYCOSф-sinф)-Z o Y+n o (uYSinф+cosф).
где ф - курс летательного аппарата, и - угол тангажа, y - угол крена.
Соответственно, расчетное положение линии визирования в углах ОЭС определяется углом места е и курсовым углом в:
е = arctg ( Y / Sqrt ( X 2 + Z 2), в = arctg ( Z / X ).
По данным углам отстраивается линия визирования ОЭС. Несовпадение расчетной линии визирования с фактическим положением ориентира принимается в качестве поправок к ориентации ОЭС. Искомая поправка по углу места:
Ае = е - е*, где е* - измеренное значение угла места ОЭС.
Поправка по курсовому углу:
Аф = в - в*, где в* - измеренное значение курсового угла ОЭС.
Значение поправок по углу тангажа и углу крена Аи и Ay соответственно может быть корректно определено по двум и более замерам, разнесенным по углу на величину от 600 до 1200 как решение системы уравнений вида:
Ае =AucoSP+AYSinp.

Рис. 2. Коррекция наведения авиационной ОЭС по ориентиру
При расположении ориентира коррекции в рабочем секторе ОЭС, ограниченном курсовым углом ± 300 достаточно одного замера, при этом поправки по углу тангажа и углу крена могут быть определены как:
Δυ = Δεcosβ , Δγ = Δεsinβ.
На рис. 2 представлен пример осуществления (индикационный кадр) коррекции наведения ОЭС по визуально видимому ориентиру. Индикация на борту воздушного судна отображается летному составу на экране бортовых многофункциональных индикаторов (МФЦИ). Индикаторы МФЦИ представляют собой [14, 15] изделия авионики, содержащие жидкокристаллический (светодиодный) экран, вычислительный узел, узлы интерфейсных каналов ввода-вывода информации и кнопочную панель управления.
Выводы: коррекция наведения авиационной оптико-электронной станции по визуально видимому ориентиру может применяться в качестве оперативной коррекции ошибок измерений положения линии визирования при проведении авиационных поисковых работ. Применение коррекции позволит повысить точность определения координат объектов поиска и точность координатного наведения на них. Ожидаемая величина погрешности определения угловых координат объекта после проведения коррекции составляет не более 10 угловых минут.
Список литературы Коррекция наведения авиационной оптико-электронной станции при проведении поисковых работ
- Сильвестрова, М.М. Эргатические интегрированные комплексы летательных аппаратов. -М.: Филиал Воениздата, 2007. 512 с.
- Черный, М.А. Воздушная навигация/М.А. Черный, В.И. Кораблин. -М.: Транспорт. 1991. 432 с.
- Производство полетов воздушных судов. Том 2. Построение схем визуальных полетов и полетов по приборам. Doc 8168. -Монреаль, ИКАО, 2014. 940 с.
- Бабич, О.А. Обработка информации в навигационных комплексах. -М.: Машиностроение, 1991. 512 с.
- Байбородин, Ю.В. Бортовые системы управления полетом/Ю.В. Байбородин, В.В. Драбкин, Е.Г. Сменковский и др. -М.: Транспорт, 1975. 336 с.
- Маркелов, В.В. Принципы индикации маршрутных траекторий полета летательного аппарата на экране бортовых средств отображения информации/В.В. Маркелов, М.О. Костишин, И.О. Жаринов и др.//Научно-технический вестник информационных технологий, механики и оптики. 2016. Т. 16, № 1. C. 96-107.
- Маркелов, В.В. Реализация построения маршрутных траекторий для отображения на бортовых многофункциональных индикаторах/В.В. Маркелов, М.О. Костишин, И.О. Жаринов, В.А. Нечаев//Информационно-управляющие системы. 2016. № 1. C. 40-49.
- Маркелов, В.В. Алгоритм расчета навигационных параметров полета летательного аппарата по маршрутам зональной навигации/В.В. Маркелов, А.В. Шукалов, М.О. Костишин и др.//Мехатроника, автоматизация, управление. 2016. Т. 17, № 10. C. 697-702.
- Markelov, V. The course correction implementation of the inertial navigation system based on the information from the aircraft satellite navigation system before take-off/V. Markelov, A. Shukalov, I. Zharinov et al.//IOP Conference Series: Materials Science and Engineering. 2016. Vol. 124. №. 1. Art. 012020.
- Markelov, V.V. Constructing and displaying the trajectory path on the aircraft on-board cockpit multifunction displays/V.V. Markelov, A.V. Shukalov, I.O. Zharinov et al.//Indian Journal of Science and Technology. 2016. Vol. 9. №. 21. Art. 95219.
- Костишин, М.О. Оценка точности визуализации местоположения объекта в геоинформационных системах и системах индикации навигационных комплексов пилотируемых летательных аппаратов/М.О. Костишин, И.О. Жаринов, О.О. Жаринов и др.//Научно-технический вестник информационных технологий, механики и оптики. 2014. № 1. C. 87-93.
- Жаринов, И.О. Алгоритм формирования и вывода картографических изображений в системах навигации пилотируемых летательных аппаратов/И.О. Жаринов, Ю.А. Кирсанова, П.В. Коновалов, М.О. Костишин//Мехатроника, автоматизация, управление. 2014. № 8. C. 68-72.
- Костишин, М.О. Алгоритмы автоматизации конфигурирования загрузочных компонентов аэронавигационной информации и геоинформационных данных авионики/М.О. Костишин, А.В. Шукалов, П.П. Парамонов и др.//Мехатроника, автоматизация, управление. 2014. № 9. C. 64-72.
- Жаринов, И.О. Бортовые средства отображения информации на плоских жидкокристаллических панелях: учеб. пособие/Информационно-управляющие системы//И.О. Жаринов, О.О. Жаринов. -СПб: ГУАП, 2005. 144 с.
- Костишин, М.О. Исследование визуальных характеристик средств отображения пилотажно-навигационных параметров и геоинформационных данных в авионике/М.О. Костишин, И.О. Жаринов, О.О. Жаринов//Информационно-управляющие системы. 2014. № 4. C. 61-67.
