Корреляционный метод поиска и координатометрии излучающего радиоэлектронного средства в заданном секторе

Автор: Козирацкий Ю.Л., Паринов М.Л., Мамаджанян Е.А.
Журнал: Журнал Сибирского федерального университета. Серия: Техника и технологии @technologies-sfu
Статья в выпуске: 8 т.9, 2016 года.
Бесплатный доступ
Предложен метод корреляционной координатометрии источников радиоизлучения, основанный на триангуляционном способе местоопределения, позволяющий реализовать разрежение входного потока электромагнитных контактов с источником радиоизлучения (ИРИ) по пространственному признаку.
Источник радиоизлучения, поиск, координатометрия, триангуляционный метод местоопределения, корреляционная обработка, узкополосные сигналы
Короткий адрес: https://sciup.org/146115158
IDR: 146115158 | УДК: 621.383 | DOI: 10.17516/1999-494X-2016-9-8-1247-1253
Correlation method of search and measurement of coordinates the radiating radio-electronic means in the set sector
The method correlation Measurement of coordinates the radio emission sources, based on a triangulable way of the fixing is offered, allowing to realize depression of an entrance stream of electromagnetic contacts with RIS to a spatial sign.
Текст научной статьи Корреляционный метод поиска и координатометрии излучающего радиоэлектронного средства в заданном секторе
Рис. 1. Графическая постановка задачи
от пеленгаторов; θ1, θ2 – азимуты направления максимумов диаграмм направленностей антенн первого и второго пеленгаторов соответственно.
Существо триангуляционно-корреляционного местоопределения заключается в реализации синхронного по пространству и времени пеленгования источников излучения с последующей корреляционной обработкой потока сигналов от каждого из пеленгаторов в интересах выявления сигналов тех источников, координаты которых принадлежат априорно заданной «просматриваемой» области пространства [2–4]. Пространственно-временная синхронизация реализуется путем одновременного формирования диаграмм направленности пеленгаторов, максимумы которых ориентированы на геометрический центр просматриваемого элемента области поиска.
Выражения, определяющие вычислительный алгоритм управления диаграммами направ-ленностей пеленгаторов, представлены в следующем виде:
где
0 1 ' = arctg (
У о - У1 + j • dy
x0 - x1 + i • dx
0/- a, 01 > a a - 0 ', 01' < a
0 2 ' = arctg (
d
Уо — y + j • dy — Ai
0 y ----42-7 ), 0 2
x - x0 + B - i • d + xA
10 x /2
02'+ a - n, 02' > n - a n - (a + 02'), 02' < n - a
i = 1, n -1, j = 1, m — 1, n = [Dr], m = [Dy1 ] dxdy
Следует отметить, что углы q1', q2' – величины, функционально зависящие от времени. Вид зависимости определяется выражениями (1) через параметры индексов элементов разрешения области поиска. В частности, j = Fy (t), E{Fy (t)} = [1, m -1]
i = F x ( t ), E { F x ( t )} = [1, n - 1]
Одной из основных особенностей формирования Fy ( t ) и Fx ( t ) помимо согласования их областей определения, что обеспечивает синхронизацию в изменении диаграмм направленностей (ДН) пеленгаторов, является реализация возможности функционального исключения элементов разрешения области поиска с наименее вероятным расположением излучающих РЭС.
Очевидно, что с каждого из направлений ориентирования ДН пеленгаторов будет формироваться поток сигналов, излучающих РЭС. Определение наличия в каждом из потоков сигнала одного и того же радиоэлектронного средства, что свидетельствует о его расположении в области пространства пересечения диаграмм направленностей, возможно за счет корреляционной обработки.
При работе источников излучения в непрерывном режиме значение корреляционной функции сигналов пеленгаторов будет определяться в следующем виде:
t + t
K ( t ', t , t ) = J X 1 ( t) x 2 ( t -1 ') dt
t
X i ( t ) = q S i x , y j ( t ) + E S m ( t ) + n 1 (t )
m
X 2 ( t ) = q S 2 x ‘ ’ y j ( t ) + E S k (t ) + n 2 ( t ) ,
k где q e[0,1] - случайный параметр различения; S^-^t) - реализация сигнала Sx(t) (искомого сигнала) на выходе первого и второго пеленгаторов соответственно; Sm(k) – сигналы, поступающие с фиксированных направлений пеленгования первого и второго пеленгаторов соответ-ственн0; ni(2)(t) - шум на выходе первого и второго пеленгаторов; m = 1,M; n = 1, N — количество сигналов в каждом из потоков; τ – интервал времени накопления.
В интересах решения задачи различения сигналов пороговый уровень принятия решения о наличии в реализациях сигнальных функций сигнала S xi , yj ( t ) целесообразно определить в соответствии с критерием идеального наблюдателя, предусматривающим минимизацию вероятности суммарной ошибки:
h opt = argmint P ^ ош ( h )},
∞h где Pzош(h) =fР(K(t',tT)/9 = 0)dK(t',tт) + J p(K(t',tт)/9 = 1)dK(t',tт) [5]. h -∞
Рассмотрим случай пеленгования РЭС, излучающих узкополосные сигналы, поступающие на вход каждого из пеленгаторов. В качестве математических моделей определим комплексные сигналы в виде
S 1 ( t ) = s m 1 ( t ) e ( m ° t + « < t = s m 1 ( t ) j 0
S2( t) = Sm 2( t) ej(^ t+^ t )+Фю) = Sm 2( t) eM t, где Sm1(t), Sm2(t) – комплексные амплитуды рассматриваемых сигналов пеленгаторов [6].
1*
Исходя из соотношения a ( t ) • b ( t ) = -Re{ a ( t ) • b ( t ) J a ( t ) • b ( t )} , можно показать, что
K ( t \t , t ) = 1 [Re J Ц( t ) S(t - t ') dt } + Re‘J S ( t ) S 2 ( t - t)dt }].
Интегрируя комплексные функции сигналов, получим:
I t * *
f S ( t ) S 2 ( t - t ') dt = S 1 m ( t ) S 2 m ( t ) [ e j(2 w 0t +1V) ( e j w 0 t - 1)]
t 2 w 0
.
J S ( t ) S 2 ( t - 1 ') dt = .S 1 m ( t ) . S 2 m ( t )t e - j ( w 0 t 1 -A j ) t
Следует отметить, что выражения (8) получены при ограничениях на динамику изменения огибающей сигналов и множителей угловой модуляции (ejj1(t),ejj2(t)), а именно dS1m(t) dt
« 0, dS 2 m (t ) t e [ t , t + t ] dt
« 0
t g [ t,t + t ]
d j 1 ( t ) dt
« 0 d j 2 ( t ) t e [ t, t + t ] dt
« 0
t g [ t,t + t ]
Подставляя (8) в (7), окончательно для корреляционной функции узкополосных сигналов получим:
K ( t ', t , t ) = S 1 m S 2 m [ sm( W c t ) sin(2 w 0 t + w 0 t + w 0 t '+ j 1 ( t ) + j 2 ( t ) + j 01 + j 02 ) +
2 w 0 (10)
+ t cos( w 0 1 '-A j )]
Введенные ограничения (9) позволяют произвести анализ корреляционной функции, положив j 1 ( t ) = j 1 = 0, j 2( t ) = j 2 = 0, j 01 = 0, j 02 = 0, что не повлияет на закономерность ее поведения на множестве аргументов.
Таким образом,
K ( t ', t , t ) = S 1 m S 2 m [ Sin( W 0 t ) sin(2 w 0 1 + w 0 t + w 0 1 ') + 1 cos( w 0 1 ')]. (11)
-
2 w 0
В соответствии с выражением (11) были получены графики зависимости K ( t ', t , t ) от времени задержки и интервала времени накопления применительно к сигналу с частотой f = 1 МГц (рис. 2).
Анализ представленных зависимостей свидетельствует о периодичности корреляционной функции, что объясняется гармоническим характером исходных сигналов. При этом в области – 1251 –
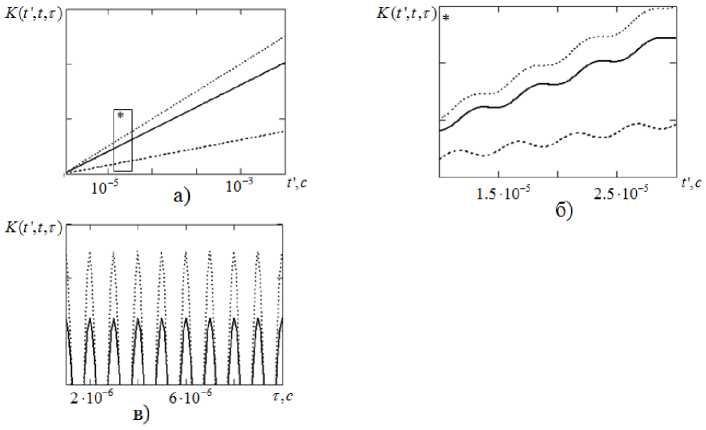
Рис. 2. Графики зависимости K ( t ', t , t ) от времени задержки сигналов и времени накопления
значений времени накопления период функции корреляции TK(ttt) = T0/2 (рис. 2б), в области значений времени задержки между сигналами TK(t‘ t,t) = T0 (рис. 2в). Следует отметить, что при больших значениях времени накопления по сравнению с длительностью периода функции (t >> T0) величина флуктуаций корреляционной функции значительно меньше ее средне го, так, при t / T0 = 100 и времени задержки, кратному T0 (t1 / T0 = n, n е □ )
K ( t ', t , t )
A K ( t ', t , t )
□ 1000
. Помимо этого, периодичность функции корреляции следует учитывать при анализе времени
(2^, n е □ - K ( t ', t , t ) = 0.
задержки сигналов пеленгаторов, в частности при t , / T 0 =
Таким образом, в статье рассмотрен метод определения местоположения источников радиоизлучения в заданном секторе поиска, основанный на триангуляционной координато-метрии с совместной корреляционной обработкой аддитивного потока сигнальных функций каждого из пеленгаторных постов, позволяющей реализовать режекцию входного потока электромагнитных контактов с ИРИ, тем самым повысить пропускную способность системы местоопределения и обеспечить поиск и анализ излучений в априорно заданном секторе поиска.
Список литературы Корреляционный метод поиска и координатометрии излучающего радиоэлектронного средства в заданном секторе
- Радзиевский В.Г., Сирота А.А. Информационное обеспечение радиоэлектронных систем. М.: ИПРЖР, 2001. 456 с.
- Козирацкий Ю.Л., Паринов М.Л. Способ определения местоположения источников радиоизлучений с режекцией входного потока излучений на основе корреляционного анализа результатов наблюдения. Радиотехника, 2013, 7, 16-19
- Патент на изобретение РФ № 2540126, МКИ G01S. М.: РОСПАТЕНТ, 2014
- Модели пространственного и частотного поиска/отв. ред. Ю.Л. Козирацкий. М.: Радиотехника, 2014. 342 с
- Тихонов В.И. Статистическая радиотехника. М.: Сов. радио, 1966. 624 с
- Баскаков С.И. Радиотехнические цепи и сигналы. М.: Высш. шк., 2003. 462 с
