Критерии устойчивости линейных систем и математические модели их анализа

Автор: Лучников И.В., Богиня Н.А.
Журнал: Международный журнал гуманитарных и естественных наук @intjournal
Рубрика: Физико-математические науки
Статья в выпуске: 4-5 (91), 2024 года.
Бесплатный доступ
Критерии устойчивости, определенные в стандартной теории линейных систем, не являются исчерпывающими и демонстрируют некоторые несоответствия. В данной научной статье рассматривается проблема устойчивости линейных систем и математические модели, используемые для её анализа. Также рассмотрены понятие устойчивости и ее критерии, определяющим устойчивость линейных систем. Основное внимание уделено определению новых критериев устойчивости, которые более соответствуют реальным физическим ситуациям. В частности, приводится различие между статической стабильностью и динамической устойчивостью, чтобы проанализировать устойчивость систем во временной области и в эквивалентной области изображений с учетом преобразования Лапласа.
Устойчивость, линейная система, преобразование лапласа, критерий устойчивости, статическая устойчивость, динамическая устойчивость, частотная устойчивость
Короткий адрес: https://sciup.org/170205001
IDR: 170205001 | DOI: 10.24412/2500-1000-2024-4-5-100-103
Criteria for the stability of linear systems and mathematical models for their analysis
The stability criteria defined in the standard theory of linear systems are not exhaustive and demonstrate some inconsistencies. This scientific article discusses the problem of stability of linear systems and the mathematical models used to analyze it. The concept of stability and criteria determining the stability of linear systems are also considered. The main attention is paid to the definition of new stability criteria that are more consistent with real physical situations. In particular, a distinction is made between static stability and dynamic stability in order to analyze the stability of systems in the time domain and in the equivalent image domain, taking into account the Laplace transform.
Текст научной статьи Критерии устойчивости линейных систем и математические модели их анализа
Устойчивость систем в области изображений с учетом Лапласа эквивалентна стабильности систем во временной области. Для изучения устойчивости систем мы используем такой пробный сигнал, как входная функция (входной сигнал). Различают три типа устойчивости:
-
- статическая устойчивость;
-
- динамическая устойчивость;
-
- частотная устойчивость.
Критерий устойчивости.
Рассмотрим стационарную линейную систему, передаточная функция которой, с учетом преобразования Лапласа, равна
k(s - z 1 )(s - z 2 )…(s - z m ) (s-p 1 )(s-p 2 )…(s-p n )
где z j (j=1, 2, ...m) – нули системы;
p i (i=1, 2, ... n) – полюса и k=b m /a n . С учетом преобразования Фурье
k(jω-z 1 )(jω-z 2 )…(jω-z m )
G(jω) = (jω-p1)(jω-p2)…(jω-pn)
Y(jω) = G(jω)X(jω)(3)
ω = 2πf(4)
Статическая стабильность . Чтобы изучить статическую устойчивость, сигнал Дирака должен подаваться как входной
сигнал на систему, которая изначально должна находиться в состоянии покоя. В этом случае имеем
Y(s) = G(s)X(s) =
k(s -z1)(s-z2)…(s-zm) (s-p 1 )(s-p 2 )…(s-p n )
Поскольку для сигнала Дирака X(s)=1
k(s - z 1 )(s - z 2 )…(s - z m ) (s - p 1 )(s -p 2 )…(s-p n )
Используя алгебраическую факторизацию, имеем
A 1 A 2 A n
Y(s) = + + ⋯ + s-p1 s-p2 s-pn переходя из области изображений во временную область с помощью обратного преобразования Лапласа, имеем
y(t) = A 1 ep1t + A 2 ∗ep2t + ⋯ + A n epnt
Каждое слагаемое Aiepit (i=1, 2, ... n) может иметь различную эволюцию в зависимости от того, являются элементы действительными или комплексными. Если значения действительные, то они могут
быть положительными, нулевыми или отрицательными, и три возможных варианта развития событий представлены на рисунке 1.
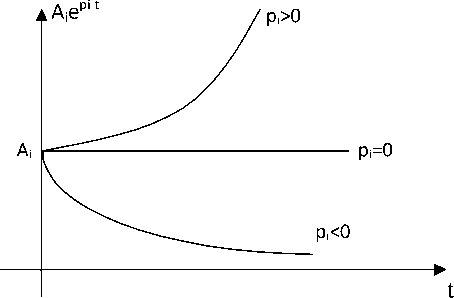
Рис. 1. Эволюция термы Aiepit, в области вещественных значений
Если полюсные элементы комплексные, то, конечно, существует также сопряженный полюс pi*, потому что комплексные алгебраические корни всегда находятся в паре. В этом случае мы имеем pi = αi + jωi pi∗ = αi - jωi используя формулы Эйлера
y(t) = Aiepit + Ai∗epit = 2Aeαitcosωit(11)
где A i = A i * = A.
В зависимости от того, является ли действительная часть α i положительной, отрицательной или нулевой, пара комплексных
полюсов может иметь три возможных варианта развития, представленных на рисунке 2.
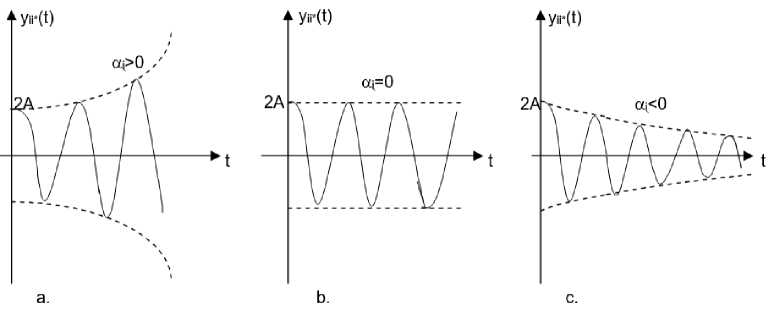
Рис. 2. Эволюция терма y ii* (t) с учетом одной пары комплексных полюсов a) действительная часть α i положительна, b) действительная часть α i равна нулю, c)
действительная часть α i отрицательна
В соответствии с данным определением статической устойчивости можно сказать, что система обладает статической устойчивостью только в том случае, если полюса системы являются отрицательными действительными или имеют отрицательную действительную часть, если полюс является комплексным.
В любом случае, граница стабильности – это мягкая форма нестабильности. Также отметим, что критерий статической устойчивости эквивалентен общему критерию устойчивости.
Динамическая устойчивость . Применим однократный ступенчатый сигнал на входе к системе, которая, как предполагается, изначально находится в состоянии покоя. Поскольку X(s)=1/s, входной сигнал добавляет нулевой действительный полюс к выходному сигналу Y(s)=G(s)X(s).
Согласно данному определению динамической устойчивости, справедливо следующее: система обладает динамической устойчивостью только в том случае, если полюса системы являются отрицательными действительными или имеют отрицательную действительную часть, если полюс является сложным.
Частотная устойчивость . Что касается (2) и (3), то мы видим, что если входной сигнал синусоидальный, то амплитуда постоянного отклика выходного сигнала бесконечна и не ограничена, если m>n или в передаточной функции есть воображаемый полюс.
На самом деле, если m>n, то мы имеем нестабильность для очень высокой частоты (ω→∞)
lim G(jω) = ∞ (12)
ω→∞
Если передаточная функция имеет один воображаемый полюс p i =jω i , то член jω i -p i =0
lim G(jω) = ∞ ω→ωi
В этом случае система нестабильна по частоте, потому что она нестабильна для частоты ω=ω i .
Система обладает стабильностью по частоте только в том случае, если m≤n и в передаточной функции нет воображаемых полюсов.
Список литературы Критерии устойчивости линейных систем и математические модели их анализа
- Бойков, В.П. Теория автоматических систем. Линейные системы: учебно-методическое пособие для студентов: в 3 ч. / В.П. Бойков, Ю.Ф. Вашкевич, В.Н. Плищ. 2013. - Ч. 1. - 131 с.
- Гаркушенко В.И., Дегтярев Г.Л. Теория автоматического управления: Учебное пособие. - Казань: Изд-во Казан. гос. техн. ун-та, 2010. - 274 с.
- Зенков А.В. Системы дифференциальных уравнений и элементы теории устойчивости: Учебник для студентов физических специальностей. - Екатеринбург: ГОУ ВПО УГТУ-УПИ, 2010. - 54 с.
- Ковалёв Д.А., Шаряков В.А., Шарякова О.Л. Теория автоматического управления: учебное пособие / ВШТЭ СПбГУПТД. - СПб., 2020. - 79 с.
- Макаров И.М., Менский Б.М. Линейные автоматические системы (элементы теории, методы расчета и справочный материал). - М.: Машиностроение, 1982. - 504 с.
- Павловская О.О. Теория автоматического управления. - Ч. 1. Линейные системы. Учебное пособие. - Челябинск: Изд. ЮУрГУ, 2020. - 60 с. EDN: DJSSDJ
- Плотников С.А., Семенов Д.М., Фрадков А.Л., Математическое моделирование систем управления. - СПб.: Университет ИТМО, 2021. - 193 с.
