Критерии выбора конструктивных решений оптимальных малополюсных линейных индукционных машин

Автор: Головенко Е.А., Горемыкин В.А., Кимев Е.С., Гудков И.С., Бежитский С.С.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Технологические процессы и материалы
Статья в выпуске: 1 (47), 2013 года.
Бесплатный доступ
Проведен обзор подходов к конструированию малополюсных линейных индукционных машин металлургического назначения. Показаны критерии выбора конструктивных решений и схем включения машин, полученные на базе многовариантных расчетов и математического моделирования электромагнитных режимов в среде Ansys Multiphysics. Варианты приоритетных конструкций в ходе оптимизации соотнесены с областями предпочтительных геометрических размеров и технических параметров индукторов ЛИМ.
Линейная индукционная машина, полюсный шаг, увеличенный рабочий зазор, численное моделирование, аналитические методы, оптимизационный алгоритм
Короткий адрес: https://sciup.org/148177000
IDR: 148177000 | УДК: 519.872
Choice criteria for constructive decisions of optimum low-polar linear induction machines
The review of approaches to designing of low-polar linear induction machines of metallurgical appointment is carried out. The choice criteria of constructive decisions and schemes of machine turning on, received on the basis of multiple calculations and mathematical modeling of electromagnetic modes in the environment of Ansys Multiphysics are shown. Variants of priority designs during optimization are correlated to areas of the preferable geometrical sizes and technical parameters of inductors LIM.
Текст научной статьи Критерии выбора конструктивных решений оптимальных малополюсных линейных индукционных машин
Линейные индукционные машины (ЛИМ) применяют в металлургии для бесконтактного силового воздействия на расплавы металлов с целью их транспортировки, управления скоростью литья металла из миксеров и печей в кристаллизаторы, перемешивания с целью гомогенизации расплавов по химическому составу, температуре и других технических операций. Такое назначение ЛИМ определяет большую величину зазора между индуктором и рабочим телом, что вызвано необходимостью размещения между ними теплоизоляции. Значительные рабочие зазоры приводят к конструктивным особенностям, т. е. большим абсолютным величинам полюсных шагов и, как следствие, малому числу пар полюсов. Пульсирующая составляющая магнитного поля сопоставима с величиной бегущей [1]. Это вызывает проявление ярко выраженных поперечного и продольного краевых эффектов в рабочем теле. Усиливается влияние эффекта переноса мощности между фазами на работу машины. Перечисленные факторы обусловливают особые требования, предъявляемые к разработке ЛИМ металлургического назначения.
Индуктор плоской односторонней ЛИМ (рис. 1) состоит из ферромагнитного сердечника 1 и многофазной обмотки 2 , расположенной в пазах сердечника. Создаваемое плоской ЛИМ бегущее магнитное поле пронизывает рабочее тело 3 , оказывая на него силовое воздействие, принуждая его к движению со скоростью V M [1].
Работа выполнена при финансовой поддержке КГАУ «Красноярский краевой фонд поддержки научной и научно-
технической деятельности».
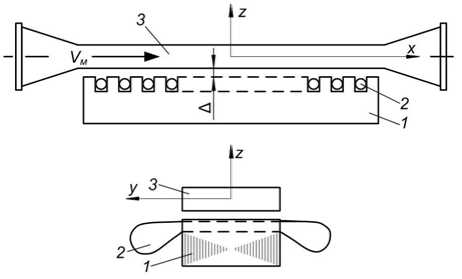
Рис. 1. Плоский индуктор ЛИМ с жидкометаллическим рабочим телом
Вследствие большого зазора Δ между сердечником и рабочим телом рассеяние велико, магнитный поток в рабочем теле ослаблен. В плоских ЛИМ металлургического назначения, линейная токовая нагрузка намного выше, чем в классических электрических машинах вращения. Вместе с тем величина допустимой плотности тока ограничена вследствие сложных условий охлаждения обмоток. Поэтому необходимы мероприятия по увеличению площади паза, что неизбежно приводит к повышению пазового рассеяния.
Применение инженерных методик расчета плоских односторонних ЛИМ с увеличенным рабочим зазором, основанных на аналитических выражениях, приводит к большим погрешностям расчета. Как следствие, существующие сегодня плоские односторонние ЛИМ с увеличенным рабочим зазором, далеки от оптимального варианта с позиций энергетической эффективности. С появлением современных автоматизированных средств численного моделирования и параметрической оптимизации, а также средств автоматизации натурных исследований, появились возможности многовариантных расчетов плоских ЛИМ. Накопленный опыт и информационная база позволяют определить критерии и разработать рекомендации по созданию специальных машин оптимальной конструкции, для эксплуатации в литейных производствах металлургических предприятий.
В плоских ЛИМ более половины энергии, потребляемой индуктором, расходуется на компенсацию последствий пазового рассеяния. Кроме того, большой рабочий зазор приводит к заданию больших значений полюсного шага и, как следствие, малому числу полюсов. Из-за малого числа полюсов в машинах с разомкнутым магнитопроводом присутствует магнитное перераспределение мощностей между обмотками разных фаз. Эти факторы приводят к существенным особенностям расчета и проектирования плоских ЛИМ по сравнению с машинами вращения, но ограничивают число вариантов их исполнения.
Можно встретить разные конструктивные исполнения ЛИМ. Так, например, уже более полувека шведско-германский концерн АВВ использует индукторы ЛИМ с расщепленной фазой. Эта конструкция имеет двухфазную обмотку с одной полюсной парой на длину машины 2р = 2. Аналогичные индукторы для сталеплавильных печей под названием «Статор электромагнитного перемешивания» (СЕП 2) в СССР поставляла «Электросила» (г. Ленинград). Недостатками таких конструкций были водяное охлаждение токоведущих частей, большая стоимость, относительная сложность и невысокая надежность.
Известен опыт применения конструкции плоской ЛИМ, разработанной СКБ МГД при институте физики Латвийской АН. Эта ЛИМ выполнена с обмоткой барабанного типа вокруг ярма магнитопровода, с водяным охлаждением катушек и электропитанием от сети промышленной частоты. В силу тонкой футеровки в месте установки индуктора ЛИМ, комплекс показал себя малонадежным.
Более перспективной оказалась конструкция индуктора плоской ЛИМ с перекрещенными обмоткам по высоте паза, разработанная под руководством В. Н. Тимофеева (А. с. № 1697577) в Красноярском государственном техническом университете. Очевидным преимуществом этого индуктора ЛИМ стало воздушное охлаждение токоведущих частей, что достаточно высоко оценили металлурги. Такие индукторы ЛИМ получили широкое распространение, как в России, так и за рубежом. Однако эти ЛИМ также имеют существенные недостатки. При единичном обмоточном коэффициенте (kоб = 1) обмотка имеет коэффициент заполнения паза медью не более 0,2 и может быть использована только в двухфазном исполнении, что требует специального источника питания. Далее такая конструкция условно обозначена ЛИМ 1.
Опыт проектирования показал, что многообразие конструктивных исполнений ЛИМ не ограничено представленными вариантами. Индукторы ЛИМ могут выполнять с укороченным шагом обмотки. Такие устройства вполне конкурентоспособны вследствие их достоинств. Примеры исполнения ЛИМ с укороченным шагом представлены на рис. 2, б–г .
Вариант ЛИМ с укороченным шагом обмотки, показанный на рис. 2, б , есть частный случай машины Шербиуса [1] с четырьмя явно выраженными выступами на длину машины, с двухфазной обмоткой с фазной зоной α = 90 электрических градусов, с относительным шагом β = 1/2, двумя парами полюсов 2 р = 2, числом пазов Z = 4 и обмоточным коэффициентом k об = 0,707. Однако также как и ЛИМ 1, машине (далее ЛИМ 2) свойственны специальные требования к источнику питания.
Значительные перспективы применения имеют индукторы ЛИМ с трехфазной укороченной обмоткой, и с тремя (рис. 2, в ) или с шестью явно выраженными полюсными выступами (рис. 2, г ) на длину машины. Эти варианты обозначены соответственно ЛИМ 3 и ЛИМ 4. Для электропитания таких конструкций можно применить стандартные транзисторные IGBT-преобразователи частоты. Особенностью трехфазных ЛИМ является возможность их работы в разных схемах включения. Например, катушки ЛИМ 3 можно включать по двум схемам – ABC и AYC (обозначения векторно-топографической диаграммы [1]). При схеме включения ABC индуктор ЛИМ будет иметь параметры: α = 120 электрических градусов, β = 2/3, 2 р = 2, k об = 0,985. А по схеме AYC: α = 60 электрических градусов, β = 1/3, 2 р = 1 и k об = 0,342 . Вторая схема характеризует инверсное включение средней катушки. При этом будет изменен полюсный шаг, что способствует медленному ослаблению бегущего магнитного поля в рабочем зазоре. Поэтому схема AYC имеет преимущества.
В отличие от ЛИМ 3, устройство ЛИМ 4 представляет собой машину Шербиуса с шестью явно выраженными выступами и имеет уже четыре схемы включения:
AZBXCY (α = 60º, β = 1/3, 2 р = 2, k об = 0,342);
AABBCC* (α = 120º, β = 1/3, 2 р = 2, k об = 0,557);
AAYYCC* (α = 60º, β = 1/6, 2 р = 1, k об = 0,168);
ABCABC (α = 120º, β = 2/3, 2 р = 4, k об = 0,985).
Примечание. * Схемы AABBCC и AAYYCC являются аналогами ABC и AYC, но при этом отличаются наличием двух полюсов на соответствующую фазу.
Такое разнообразие схем соединения позволяет плавно регулировать технологические параметры металлургического оборудования и получать полезные закономерности распределения поля скоростей в рабочем теле.
Таким образом, определение критериев выбора перспективной и эффективной конструкции ЛИМ из рассмотренных выше, является непростой научно-технической задачей и требует проведения исследований до принятия решения. Инструментальным средством поддержки алгоритма принятия решения служат результаты физического и вычислительного эксперимента. С развитием мощных средств численного имитационного моделирования натурные уступают приоритет машинному моделированию. Их применяют с целью верификации численно-математических моделей.
В фундаменте профессиональных инструментов разработчика лежат численные методы [3]. За ними безусловный приоритет при формировании информационной базы для проектного решения. Но для полноценной реализации численных моделей требуются значительные временные и вычислительные ресурсы, что можно отнести к недостаткам.
В определенном смысле численным методам можно противопоставить аналитические методы и модели. Однако эксперименты с ЛИМ показали, что применение инженерных методик расчета линейных машин, вбирающих результаты исследований А. И. Вольдека, Х. И. Янеса [1; 2] и других выдающихся ученых, особенно при учете специфики электромагнитных процессов малополюсных ЛИМ, для различных схем их включения, дают погрешность от 20 до 50 %. Это обусловлено тем, что плоские односторонние ЛИМ с увеличенным рабочим зазором отличаются от вращающихся электрических машин, а методики сгенерированы на базе теории асинхронных двигателей и адаптированы с помощью коэффициентов, получен- ных из аналитических выражений, с существенными допущениями.
Поэтому для оптимального выбора лучшего конструктивного исполнения ЛИМ была решена задача построения комбинированной математической модели, достоверно отражающей электромагнитные процессы в ЛИМ с учетом описанных особенностей плоских односторонних ЛИМ с увеличенным рабочим зазором. С применением модели в совокупности подсистем среды моделирования ANSYS проведены комплексные исследования и получены результаты, позволяющие сделать обобщающие выводы по принятию решения.
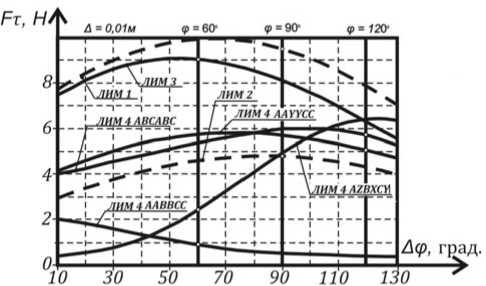
Результаты сравнения плоских ЛИМ различных конструктивных исполнений для типоразмера с активной длиной индуктора ЛИМ l 1 = 280 мм (рис. 3), приведены в [3; 4]. Характер процессов учитываемых во всех четырех конструктивных исполнениях, аналогичен ЛИМ-3.
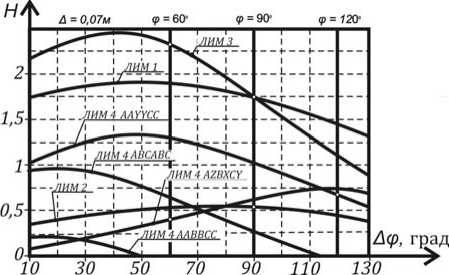
Зависимости тангенциальной составляющей силы F τ от разности фаз Δφ на рабочих зазорах 0,01 м и 0,07 м представлены соответственно на рис. 3, а , б .
При малых рабочих зазорах высокие характеристики имеет ЛИМ-1 (рис. 3, а ), что определяется единичным обмоточным коэффициентом, но с увеличением зазора эта конструкция начинает проигрывать ЛИМ-3 (см. рис. 3, б ).
Преимущество ЛИМ-3 перед двухфазной ЛИМ-1 наблюдается почти во всем диапазоне рабочих зазоров (рис. 4). При этом ЛИМ-3 не требуется специального источника питания. Она имеет меньшие массогабаритные показатели из-за более компактных лобовых частей и меньшую мощность. При равном электромагнитном напоре достигается экономия электроэнергии в пределах 25–40 % в зависимости от типоразмера индуктора. В результате исследований в качестве прототипа для построения серии предложено использование машины Шербиуса с тремя явно выраженными выступами и схемой включения AYC для всех рабочих зазоров 0,05τ ≥ Δ ≥ 0,5τ.

а

б

в

г
Рис. 2. Конструктивные исполнения плоских ЛИМ
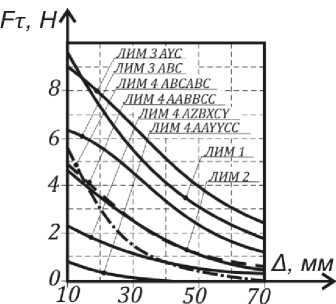
Рис. 4. Зависимости тангенциальной составляющей усилия от рабочего зазора
а
Рис. 3. Интегральные характеристики ЛИМ различных конструктивных исполнений
б
На основе полученных результатов разработаны рекомендации по применению конкретного конструктивного исполнения ЛИМ при разных величинах рабочего зазора. Сведения, полученные в ходе оптимизационных исследований, положены в основу прикладной задачи проектирования серии линейных машин. Проанализировав полученные зависимости можно сделать общий вывод, что эффективной работы любой из конструкций ЛИМ необходимо проводить анализ, выявления оптимальных размеров и параметров питания.
Примером практического применения полученных результатов может быть выбор оптимальной конструкции и типоразмера ЛИМ для конкретных заданных условий производства. Для примера были заданы следующие условия:
-
1. Величина рабочего зазора для ЛИМ 40 мм.
-
2. Заданный уровень тангенциального усилия 2,5 Н.
-
3. Ограничение по активной длине индуктора не более 220 мм, то есть типоразмер 1 или меньше.
Зависимости тангенциального усилия от величины рабочего зазора представлены на рис. 5. На плоскости с усилиями ЛИМ отмечена точка 3, которая удовлетворяет всем условиям по зазору и усилию. Заданным параметрам ЛИМ удовлетворяют ЛИМ-1 и ЛИМ-3 AYC. Эти варианты ЛИМ даже превышают требуемые условия. Так, например, ЛИМ-1 позволяет разви- вать на рабочем зазоре 40 мм усилие 2,85 Н (точка 2), а ЛИМ-3 со схемой AYC – 3,7 Н (точка 1). Таким образом, напряжение, а следовательно, и мощность ЛИМ могут быть снижены. Эти же машины при необходимости могут использоваться и на больших рабочих зазорах, например, ЛИМ-1 на зазоре 44 мм, а ЛИМ-3 со схемой AYC – 55 мм.
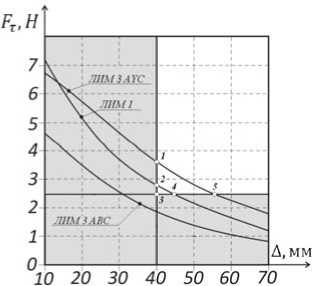
Рис. 5. Пример оптимального выбора конструктивного исполнения ЛИМ по заданным критериям
При массовом выпуске машин для указанных условий целесообразно разработать такую ЛИМ, которая бы удовлетворяла требованиям и имела меньшие массогабаритные размеры и потребляемую мощность. Кривая зависимости усилия от рабочего зазора проходит через точку 3. Эта задача может быть решена путем оптимизационного поиска перебором или с помощью современных стохастических алгоритмов.
Таким образом, можно сделать следующие выводы:
-
1. В большинстве конструкций ЛИМ, предназначенных для бесконтактного силового воздействия на расплавы металлов, есть запас для повышения их энергоэффективности. Исследованием выявлены пути улучшения ЛИМ, основные достоинства и недостатки в процессе проектирования и эксплуатации.
-
2. Результаты исследования по численным параметрическим моделям среде ANSYS существующих конструкций, а также альтернатив, позволили выде-
- лить варианты ЛИМ с низкими показателями эффективности при одинаковых исходных условиях и обосновать бесперспективность модификации подобных технических решений.
-
3. Для одного их перспективных решений на основании расчетов проведен выбор конструкции и схемы включения индуктора и получены положительные результаты для конкретных условий эксплуатации.
-
4. Показано, что при равной линейной токовой нагрузке выгоднее использовать конструкцию ЛИМ-3 с включением по схеме AYC. При этом есть возможность существенно снизить плотность тока в проводнике и тем самым повысить надежность.
-
5. В результате исследования получен комплекс качественных и количественных критериев для построения алгоритма оптимального выбора конструктивного исполнения ЛИМ и параметров питания.
