Кривая обучения опытного хирурга и ранние результаты применения роботической системы CORI при эндопротезировании коленного сустава

Автор: Айрапетов Г.А., Данильянц А.А., Загородний Н.В., Сулейманянц Д.К., Яцукова В.Е., Ахмат А.А., Аль Кафавин А.Х.А., Самкович Д.А.
Журнал: Вестник Национального медико-хирургического центра им. Н.И. Пирогова @vestnik-pirogov-center
Рубрика: Оригинальные статьи
Статья в выпуске: 1 т.21, 2026 года.
Бесплатный доступ
Введение. Эндопротезирование коленного сустава является методом выбора при лечении поздних стадий гонартроза. Новый этап развития технологий в ортопедии связан с внедрением в практику хирургов-ортопедов роботических систем. Цель работы – оценить кривую обучения и сравнить ранние результаты эндопротезирования коленного сустава с применением роботической системы CORI с мануальным способом замены сустава. Материалы и методы. В проспективном исследовании приняло участие 30 пациентов (11 мужчин, 19 женщин), которые с целью рандомизации были разделены на две группы с использованием генератора случайных чисел: группа №1 (n = 15), пациентам выполнялось роботизированное эндопротезирование коленного сустава с применением системы CORI компании Smith & Nephew; группа №2 (n = 15), пациентам выполнено эндопротезирование коленного сустава мануальным способом. Оценка функционального состояния коленного сустава в послеоперационном периоде проводилась и использованием опросника KSS. Результаты. Анализ кривой обучения хирурга, имеющего опыт применения других роботических систем, показал, что, начиная с 3-ой операции её длительность начала снижаться и вышла на плато с 6-го применения роботической системы CORI. В группе №1 длительность операции была статистически значимо больше, по сравнению с группой №2. Объём интраоперационной кровопотери был сопоставим в обеих группах. Значения показателя KSS были статистически значимо выше в группе №1. Обсуждение. Авторы предполагают, что основной причиной более высоких баллов KSS в группе №1 является минимальный мягкотканный релиз, в данном исследовании достигаемый применением подхода функционального выравнивания. Заключение. Полученные в ходе исследования данные свидетельствуют о том, что хирург, имеющийся опыт применения других роботических систем, может преодолеть кривую обучения и выйти на плато уже на 6-ом эндопротезировании коленного сустава. При этом длительность операции с применением роботической системы после преодоления кривой обучения была дольше, в сравнении с мануальной методикой. Применение подхода функционального выравнивания оси нижней конечности способствовало более высоким показателям KSS в раннем послеоперационном периоде, однако для более точного понимания необходимы дальнейшие исследования.
Роботическое эндопротезирование коленного сустава, функциональное выравнивание, гонартроз
Короткий адрес: https://sciup.org/140314185
IDR: 140314185 | DOI: 10.25881/20728255_2026_21_1_83
Learning curve of experienced surgeon and early results of the CORI robotic system in knee replacement
Introduction. Knee arthroplasty is the method of choice in the treatment of late stages of gonarthrosis. A new stage in the development of technologies in orthopedics is associated with the introduction of robotic systems into the practice of orthopedic surgeons. The aim of the study: to evaluate the learning curve and compare early outcomes of knee replacement using the CORI robotic system with manual joint replacement. Materials and methods. The prospective study involved 30 patients (11 men, 19 women), who were randomized into two groups using a random number generator: Group 1 (n = 15), patients underwent robotic knee arthroplasty using the CORI system from Smith&nephew; Group 2 (n = 15), patients underwent manual knee arthroplasty. Evaluation of the functional state of the knee joint in the postoperative period was also carried out using the KSS questionnaire. Results. Analysis of the learning curve of a surgeon with experience in using other robotic systems showed that starting from the 3rd case, the duration of the operation began to decrease and reached a plateau from the 6th case of using the CORI robotic system. In group №1, the duration of the operation was statistically significantly longer compared to group №2. The volume of intraoperative blood loss was comparable in both groups. The KSS values were statistically significantly higher in group №1. Discussion. The authors suggest that the main reason for the higher KSS scores in group №1 is the minimal soft tissue release, which in this study was achieved using the functional alignment approach. Conclusion. The data obtained during the study indicate that the existing experience in using robotic systems contributes to a faster mastery of the robot-assisted CORI system. In our opinion, a surgeon with experience in working with a robotic system can overcome the learning curve and reach a plateau already at the 6th case of knee arthroplasty. Moreover, the duration of the operation using the robotic system after overcoming the learning curve was longer, compared to the manual technique.
Текст научной статьи Кривая обучения опытного хирурга и ранние результаты применения роботической системы CORI при эндопротезировании коленного сустава
Эндопротезирование коленного сустава является методом выбора при лечении поздних стадий гонар-троза [1]. С целью улучшить результаты первичного эндопротезирования за счет повышения точности пози- ционирования компонентов были предложены системы компьютерной навигации, а также персоницифицирован-ные инструменты. Однако согласно данным литературы указанные устройства не получили значительной вос-

требованности, в результате большинство хирургов по всему миру продолжают выполнять эндопротезирование коленного сустава классическим мануальным способом [2; 3]. Новый этап развития технологий в ортопедии связан с внедрением в практику хирургов-ортопедов роботических систем. Как известно, на данный момент существует несколько типов роботических установок, при этом большим интересом пользуются активные и полуактивные системы.
Активные роботические системы выполняют последовательные опилы костей автономно, при этом хирург осуществляет интраоперационный контроль и может в любой момент остановить установку и/или перейти к мануальному способу эндопротезирования. Указанные системы работают по заранее заданному предоперационному плану, основанному на проведенном КТ-исследовании нижней конечности (принцип image-based – основанный на предоперационном планировании) [4; 5]. Данный способ эндопротезирования обозначается, как роботизированное.
Полуактивные системы оснащены роботизированной рукой, с помощью которой хирург выполняет опилы. При этом данные системы могут работать как по принципу image-based (с предоперационным планированием), так и по принципу image-less (интраоперационное планирование) – план позиционирования компонентов выполняется интраоперационно на основании регистрации анатомических ориентиров роботизированной рукояткой [6]. Данный способ эндопротезирования обозначается, как робот-ассистированное.
Основными преимуществами роботических систем являются повышенная прецизионность установки компонентов, что потенциально увеличивает срок службы эндопротеза, а также возможность применения альтернативных подходов выравнивания оси нижней конечности [7–9]. К последним относятся персонифицированные способы восстановления конституционального положения коленного сустава, такие как кинематическое и ограниченное кинематическое выравнивания [10; 11]. При этом согласно данным литературы, именно внедрение в практику роботических систем, благодаря их технологическим особенностям вызвало особый интерес к функциональному выравниванию оси конечности [12]. К недостаткам роботических установок относят высокую стоимость оборудования, необходимость обучения хирургов и медицинского персонала, а также увеличенную длительность оперативного вмешательства [13].
В литературе уже описаны исследования, в которых авторы анализировали кривую обучения освоения роботической системы у хирургов, прошедших специальную подготовку, а также исследования, направленные на сравнение кривых обучаемости хирургов с разным опытом эндопротезирования коленного сустава и влияния этого фактора на скорость освоения роботической системы [14; 15].
Цель работы – оценить кривую обучения и сравнить ранние результаты эндопротезирования коленного сустава с применением роботической системы CORI с мануальным способом замены сустава.
Материалы и методы
Проведено проспективное рандомизированное одноцентровое клиническое исследование на базе кафедры травматологии и ортопедии РУДН в отделении ортопедии ГКБ №31 им. академика Г.М. Савельевой. В исследовании приняло участие 30 пациентов (11 мужчин, 19 женщин), которые с целью рандомизации были разделены на две группы с использованием генератора случайных чисел: группа №1 (n = 15), пациентам выполнялось роботизированное эндопротезирование коленного сустава с применением системы CORI компании Smith&nephew; группа №2 (n = 15), пациентам выполнено эндопротезирование коленного сустава мануальным способом.
Пациенты принимали участие в исследовании после подписания информированного добровольного согласия в соответствии со следующими критериями включения: 1. Установленный диагноз остеоартрит коленного сустава 3–4 ст. по классификации Kellgren-Lawrence, 2. Варусная/вальгусная деформация оси конечности не более 10°. Критериями невключения являлись: 1. Наличие предшествующего хирургического вмешательства в области оперируемого коленного сустава; 2. IV–V класс анестезиологического риска по шкале ASA.
Опил тибиального плато в первых 3-х случаях выполнялся методом Burr All, с 4-го случая хирург выполнял поверхностный опил плато полотном пилы с последую-

Айрапетов Г.А., Данильянц А.А., Загородний Н.В. и др.
КРИВАЯ ОБУЧЕНИЯ ОПЫТНОГО ХИРУРГА И РАННИЕ РЕЗУЛЬТАТЫ ПРИМЕНЕНИЯ РОБОТИЧЕСКОЙ СИСТЕМЫ CORI ПРИ ЭНДОПРОТЕЗИРОВАНИИ КОЛЕННОГО СУСТАВА
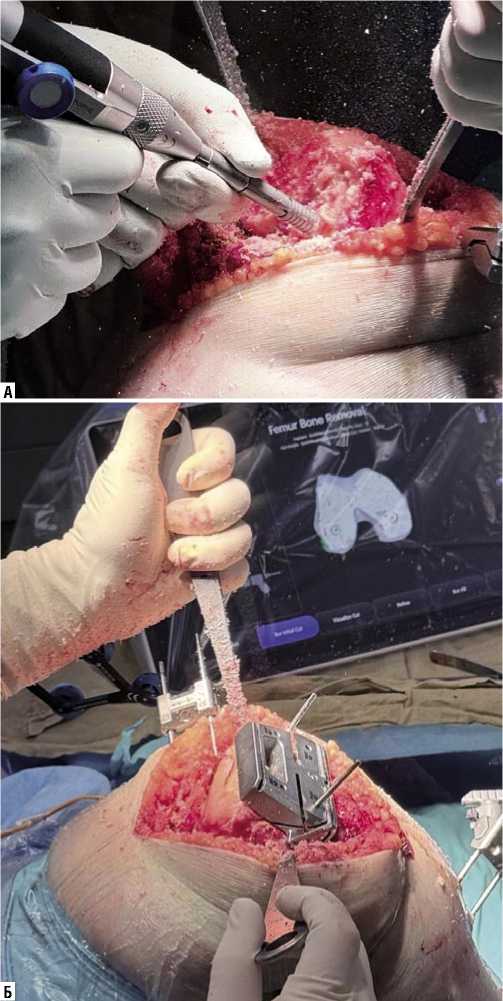
Рис. 1. А – хирург выполняет дистальный опил бедренной кости фрезой роботизированной рукоятки; Б – метод гибридного опиливания бедренной кости. Установлен резекторный блок с предварительным рассверливанием костных ориентиров роботизированной рукояткой.
щей фрезеровкой поверхности фрезой роботизированной рукоятки (Рис. 2, 3).
При этом важно отметить, что опил тибиального плато в данном случае нельзя назвать в чистом виде гибридным, поскольку гибридная методика подразумевает использование резектороного блока. Однако авторы сочли данный подход при опиле тибиального плато менее удобным по сравнению с описанной выше методикой опила с использованием полотна. В группе №1 использовалась методика функционального вырав-
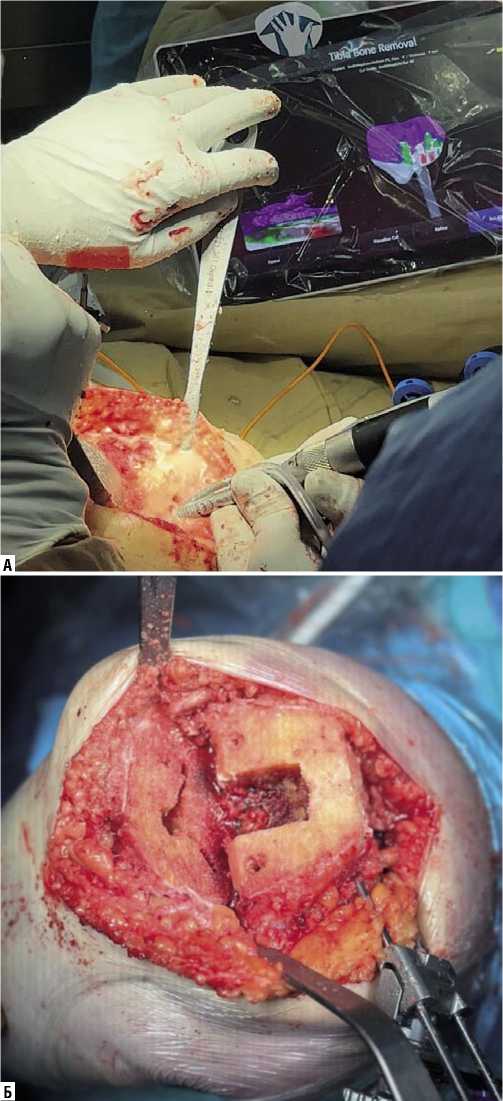
Рис. 2. А – хирург выполняет опил тибиального плато методом Burr All; Б – костные опилы после применения гибридной методики.
нивания оси нижней конечности. При нейтральном и варусном положении коленного сустава приоритетным в сохранении конституционального положения являлся угол MPTA (диапазон ±5°). При вальгусном положении коленного сустава приоритетным в сохранении конституционального положения являлся угол LDFA (диапазон ±5°). При этом планируемый угол HKA не выходил за пределы безопасной зоны ±3° [16]. Вы-
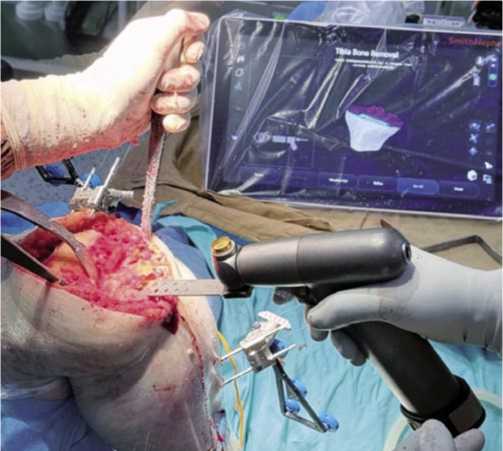
Рис. 3. Опил плато большеберцовой кости полотном пилы после формирования направительного ложа фрезой роботизированной рукоятки.
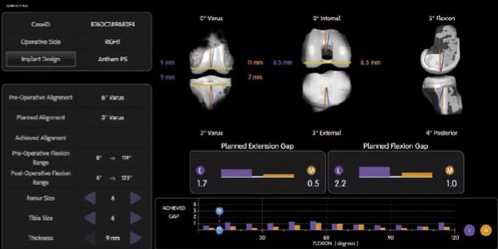
Рис. 4. Информация из планировочной консоли хирурга во время операции. Предоперационная ось конечности имеет 6° варуса. Хирург расположил компоненты таким образом, чтобы сохранить варусную конституцию коленного сустава в пределах безопасной зоны при этом сбалансировав щель.
полнение функционального выравнивания позволяло скомпенсировать сгибательную и разгибательную щели, не выполняя мягкотканный релиз. В большинстве случаев ротация бедренного компонента составляла 0° (Рис. 4). Ротация тибиального компонента находилась в пределах 3–10°.
Алгоритм хирургических шагов при выполнении эндопротезирования коленного сустава с применением системы CORI представлен на рис. 5.
Оценка KSS после операции производилась в день выписки (4–5 сутки после операции).
Анализ статистических данных выполнялся с применением программы Jamovi 2.4.11. Оценка количественных параметров на предмет соответствия нормальному распределению выполнялась с помощью критерия Шапиро-Уилка. Поскольку все исследуемые признаки в обеих группах имели распределение отличное от нормального количественные данные описывали с помощью медианы (Me) и межквартильного размаха (Q1-Q2). Категориальные данные описывали с указанием абсолютных значений и процентных долей. Сравнение двух групп по количественному показателю, распределение которого отличалось от нормального, выполняли с помощью U-критерия Манна-Уитни. Сравнение двух групп по качественному показателю, распределение которого отличалось от нормального, выполняли с помощью критерия (хи-квадрат) Спирмена. Различия считали достоверными при статистической значимости p≤0,05.
Результаты
Приведенные в табл. 1 данные свидетельствуют о сопоставимости двух когорт и об отсутствии статистически значимых различий между изучаемыми группами пациентов, что позволяет проводить последующий анализ результатов корректно.
Анализ кривой обучения хирурга, имеющего опыт применения других роботических систем, показал, что, начиная с 3-ей операции её длительность начала снижаться и вышла на плато с 6-го применения роботической системы CORI (Рис. 6).
- Подготовка
системы CORI мед. сестрой
Регистрация:

- анатомических
- Определение

- Выполнение доступа
ориентиров на бедре и тибии
- оси конечности и объема сгибания/ разгибания
- бедра и тибии
размеров компонентов
- Оценка мягкотканного баланса
- Планирование позиционированная компонентов
-
- Определение чек-поинтов
Фрезерование:
-
- бедра
-
- тибии
-
- удаление остеофитов
- Примерка тестовых
компонентов
Повторная регистрация чек-поинтов
-
- Оценка мягкотканного баланса и объема движений
-
- Классические шаги завершения операции

Рис. 5. Схема последовательности хирургических шагов во время выполнения эндопротезирования коленного сустава с применением роботической установки CORI.

Айрапетов Г.А., Данильянц А.А., Загородний Н.В. и др.
КРИВАЯ ОБУЧЕНИЯ ОПЫТНОГО ХИРУРГА И РАННИЕ РЕЗУЛЬТАТЫ ПРИМЕНЕНИЯ РОБОТИЧЕСКОЙ СИСТЕМЫ CORI ПРИ ЭНДОПРОТЕЗИРОВАНИИ КОЛЕННОГО СУСТАВА
Табл. 1. Данные пациентов и оценка предоперационного функционального состояния оперируемого коленного сустава
|
Показатель |
Группа №1 |
Группа №2 |
p |
|
Возраст, лет |
69 (66,5–71,5) |
68 (66–72) |
0,85* |
|
ИМТ |
32 (29,6–34) |
31,3 (28,3–35,1) |
0,95* |
|
Сторона вмешательства (правая/ левая) |
7 (46,7%)/8 (53,3%) |
6 (40%) /9 (60%) |
0,7** |
|
Пол (м/ж), абс |
6 (40%)/9 (60%) |
5 (33,3%)/10 (66,7%) |
0,71** |
|
Шкала KSS, баллы |
59 (45–75) |
58 (47–72) |
0,9* |
Примечание : используемый метод: * – U-критерий Манна-Уитни;
** – критерий (хи-квадрат) Спирмена.
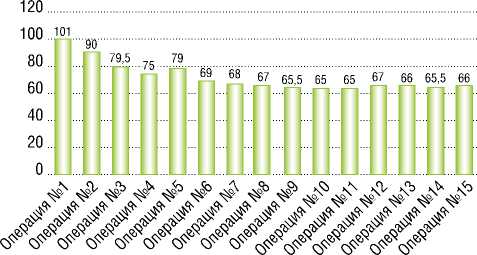
Рис. 6. График кривой обучения хирурга при эндопротезировании коленного сустава с применением роботизированной системы CORI.
Табл. 2. Послеоперационные результаты функции коленного сустава, длительности операции и интраоперационной кровопотери
|
Параметр |
Группа №1 |
Группа №2 |
р* |
|
Длительность операции, мин. |
67 (65,8–77,0) |
58 (55,5–61,5) |
<0,001 |
|
KSS, баллы |
84 (82–85,5) |
76 (74,5–77,5) |
<0,001 |
Примечание : * – используемый метод: – U-критерий Манна-Уитни.
В группе №1 длительность операции была статистически значимо больше, по сравнению с группой №2. Объём интраоперационной кровопотери был сопоставим в обеих группах. Значения показателя KSS были статистически значимо выше в группе №1. Количественные значения исследуемых параметров приведены в табл. 2.
Обсуждение
Полученные в ходе исследования данные продемонстрировали, что предшествующий опыт применения роботических систем, основанных на предоперационном планировании, у хирурга способствовал быстрому освоению роботической установки CORI, работающей по принципу интраоперационного планирования. Полученные результаты согласуются с исследованием, проведенным S.D. Stegelmann et al. [17]. В эксперименте приняли участие два хирурга, выполняющих 50–100 эндопротезирований коленного сустава мануальным способом ежегодно. В ходе исследования каждый хирург выполнил 100 робот-ассистированных операций по замене коленного сустава. Авторы пришли к выводу, что кривая обучения обоих хирургов начала снижаться после выполнения 50 случаев робот-ассистирован-ного эндопротезирования с применением установки, основанной на интраоперационном планировании. Цель исследования, проведенного C. Schopper et al., заключалась в анализе кривой обучения практикующих хирургов-эндопротезистов, выполняющих робот-ас-систированное эндопротезирование коленного сустава под руководством хирурга, имеющего опыт применения роботических систем [18]. Авторы пришли к выводу, что у всех трех хирургов, принимающих участие в исследовании, кривая обучения начала снижаться после 9-го роботического эндопротезирования.
Стоит отметить, что в ходе проведения научной работы авторы выполняли эндопротезирование коленного сустава вне зависимости от фенотипа колена по классификации CPAK [19], принимая в исследование пациентов с выраженными варусной и вальгусной деформациями, а также высоким ИМТ, что потенциально усложняло начальный этап кривой обучения. Кроме того, авторы предполагают, что применение подхода функционального выравнивания вне зависимости от вида деформации коленного сустава также могло быть причиной увеличения средней продолжительности операции в первых 4-х эндопротезирований коленного сустава.
При анализе кривой обучения выявлено, что определенные сложности возникли в 3 и 5 эндопротезированиях. В обоих наблюдениях коленный сустав имел вальгусную деформацию.
При анализе послеоперационных показателей KSS было выявлено, что более высокие баллы характерны для группы №1. Авторы предполагают, что основной причиной является минимальный мягкотканный релиз, в данном исследовании достигаемый применением подхода функционального выравнивания и, согласно данным литературы, способствующий более быстрому послеоперационному восстановлению [20; 21].
Заключение
Полученные в ходе исследования данные свидетельствуют о том, что хирург, имеющийся опыт применения других роботических систем, может преодолеть кривую обучения и выйти на плато уже на 6-ом эндопротезировании коленного сустава. При этом длительность операции с применением роботической системы после преодоления кривой обучения была дольше, в сравнении с мануальной методикой. Применение подхода функционального выравнивания оси нижней конечности способствовало более высоким показателям KSS в раннем послеоперационном периоде, однако для более точного понимания необходимы дальнейшие исследования.
Информированное согласие. Пациенты дали добровольное письменное информированное согласие.

