Криволинейный пьезоэлектрический актюатор изгибного типа

Автор: Паньков А.А.
Журнал: Журнал Сибирского федерального университета. Серия: Техника и технологии @technologies-sfu
Рубрика: Исследования. Проектирование. Опыт эксплуатации
Статья в выпуске: 1 т.18, 2025 года.
Бесплатный доступ
Предложены новые схемы функционирования пьезоэлектрических стержневых актюаторов изгибного типа на основе эффекта взаимодействия пьезоэлектрической трансформации поперечного сечения и начальной кривизны продольной оси. Разработана математическая модель изгибного деформирования дугообразного актюатора, обусловленного пьезоэлектрическим изменением высоты поперечного сечения. Получены аналитические решения для характеристик актюатора в зависимости от геометрических и электроупругих параметров элементов структуры. Численно исследованы зависимости характеристик актюатора от величины начальной кривизны его продольной оси и высоты поперечного сечения для простого однослойного и составного трехслойного актюаторов. Установлен диапазон значений радиуса кривизны криволинейного актюатора с составным поперечным сечением, при котором величина блокирующей силы превышает соответствующее значение силы для прямолинейного биморфного актюатора.
Пьезоэлектрический актюатор, начальная кривизна, трансформация поперечного сечения, изгиб криволинейного стержня, численное моделирование
Короткий адрес: https://sciup.org/146283036
IDR: 146283036 | УДК: 539.3
Curved piezoelectric actuator of bending type
New schemes of functioning of piezoelectric rod actuators of bending type are proposed on the basis of effect of interaction of piezoelectric transformation of cross section and initial curvature of longitudinal axis. Mathematical model of bending deformation of arc-shaped actuator caused by piezoelectric change of cross-section height is developed. Analytical solutions were obtained for the characteristics of the actuator depending on the geometric and electroelastic parameters of the structure elements. Dependences of actuator characteristics on value of initial curvature of its longitudinal axis and height of cross section for simple single-layer and composite three-layer actuators are numerically investigated. Range of curvature radius values of curvilinear actuator with composite cross section is established, at which value of blocking force exceeds corresponding value of force for rectilinear bimorph actuator.
Текст научной статьи Криволинейный пьезоэлектрический актюатор изгибного типа
Цитирование: Паньков А. А. Криволинейный пьезоэлектрический актюатор изгибного типа / А. А. Паньков // Журн. Сиб. федер. ун-та. Техника и технологии, 2025, 18(1). С. 6–18. EDN: HFQHLB
(прогиба). Многослойные гибкие биморфы используют для повышения чувствительности – отношения величины изгибных деформаций биморфа к приложенному на электроды управляющему электрическому напряжению, в частности, когда отражающая поверхность деформируемого зеркала расположена на внешней стороне одного из слоев биморфа [17].
В [34–36] предложены схемы функционирования криволинейных стержневых пьезоэлектрических актюаторов изгибного типа на основе эффекта взаимодействия управляемой трансформации формы, размера [34, 35] или поворота кручения [36] его поперечного сечения и начальной кривизны его продольной оси. Пьезоэлектрическое изменение формы поперечного сечения осуществляется [34, 35] посредством его изгиба в поперечной плоскости; в результате первоначально прямоугольное однослойное, или двухслойное, или кольцевое сечение приобретает «арочный», или двояковыпуклый «чечевичный» [34], или эллиптический [35] вид соответственно. Такие пьезоэлектрические трансформации поперечного сечения приводят к появлению в сечениях криволинейных стержневых актюаторов неуравновешенных изгибающих моментов, действие которых частично распрямляет, т.е. уменьшает значение начальной кривизны продольной оси актюатора. Наиболее существенно этот эффект проявляется при пьезоэлектрической трансформации прямоугольной формы тонкого двухслойного сечения к двояковыпуклой «чечевично»-трубчатой форме [34].
Цель – разработка математической модели, нахождение аналитических решений и изучение эффекта взаимодействия начальной кривизны продольной оси и пьезоэлектрической трансформации размера – высоты поперечных сечений пьезоэлектрических криволинейных стержневых (Curvilinear Rod) CR-актюаторов [35] изгибного типа для улучшения их изгибных характеристик.
Математическая модель актюатора
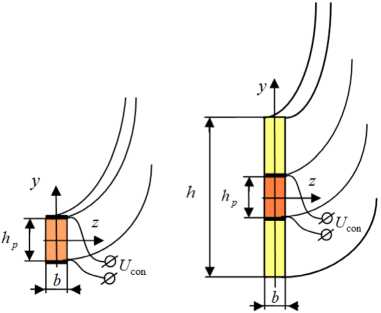
Криволинейный CR-актюатор (рис. 1) представляет собой поляризованный по толщине пьезоэлектрический дугообразный стержень с прямоугольным поперечным сечением и по-
а б
Рис. 1. Расчетные схемы криволинейного однослойного (а) и трехслойного (б) пьезоэлектрического актюатора изгибного типа
Fig. 1. Design diagrams of curvilinear single-layer (a) and three-layer (б) bending-type piezoelectric actuator верхностными электродами на его нижней и верхней цилиндрических поверхностях (рис. 1а); возможна установка дополнительных упругих покрытий (слоев) поверх электродов с образованием составного трехслойного CR-актюатора (рис. 1б) для расширения диапазона рабочих характеристик – результирующих значений прогиба и блокирующей силы на свободном торце консоли. При подключении управляющего электрического напряжения Ucon к выходам поверхностных электродов криволинейного CR-актюатора происходит пьезоэлектрическое растяжение или сжатие (в зависимости от знака Ucon) его поперечного сечения по высоте (толщине) на основе обратного пьезоэффекта. Такая пьезоэлектрическая трансформация поперечного сечения обуславливает появление в сечениях криволинейного стержня CR-актюатора реактивных изгибающих моментов. То есть изгиб криволинейного CR-актюатора возникает не от его непосредственного изгиба, как это реализуется по традиционной схеме «биморф», а опосредованно от управляемой пьезоэлектрической трансформации размера его поперечного сечения.
При подключении к электродам управляющего электрического напряжения U con пьезоэлектрический слой деформируется по толщине на величину
Sp = ^222 Л0” , (1)
hP что обуславливает перемещения
Vye(-^;^)
’ 2 2
Vy e (--;--^)
’ 2 2
точек составного поперечного сечения (рис. 1), где hp – толщина, d 222 – деформационный пьезомодуль пьезоэлектрического слоя с поляризацией по толщине. С учетом наличия начальной кривизны составного стержня управляемые пьезоэлектрические перемещения Vy (2) обуславливают возникновение удлинений
A(dl) = (Ло + j + vv )dQ - (Ro + y)dQ = vvdQ, осевых деформаций e =AC^Z)=^
* ^zo Ro + У и напряжений
= Rx ---- (3)
элементарных «волокон» с начальной длиной dl 0 = ( R 0 + y ) d θ вдоль оси x , где Ex – модуль Юнга по оси x , например, при равенстве значений этого модуля для пьезоэлектрика и для вспомогательных упругих слоев (рис. 1б). В результате в каждом сечении составного (рис. 1) криволинейного стержня (актюатора) возникает результирующий изгибающий момент
или в виде

с учетом вида неопределенных интегралов
Изгибающий момент Mz (4) частично распрямляет, т.е. уменьшает значение начальной кривизны дугообразной консоли актюатора.
Величины радиальной v • r и окружной v •α компонент


вектора перемещения v • (рис. 2) центра свободного торца дугообразной консоли актюатора определены по методу интегралов Мора c учетом выражений вспомогательных моментов
Mzl = P1R0 sin а , М-2 = PtRq (1 — cos а)
от действия единичных сил Д.2 = 1 на свободном торце консоли вдоль радиального и окружного направлений соответственно; при этом величина полного перемещения V. =4^+^ , где Jz – осевой момент инерции составного сечения (рис. 1). Аналогично (5) определим угол поворота
свободного торца консоли с учетом значения вспомогательного моментаЛДз=1, где l = α 0 R 0 – длина консоли.
Величины радиальной P • r и окружной P •α компонент силы P • (рис. 2), приложенной в центре свободного торца консоли и блокирующей ее прогиб
Р,г — (Ь^122 Ь2С112)/А, Р.а —(Ь2а11 Ъхах2) / ^
где ^^ — ^11^22 ^12 определим из решения системы линейных алгебраических уравнений
c коэффициентами
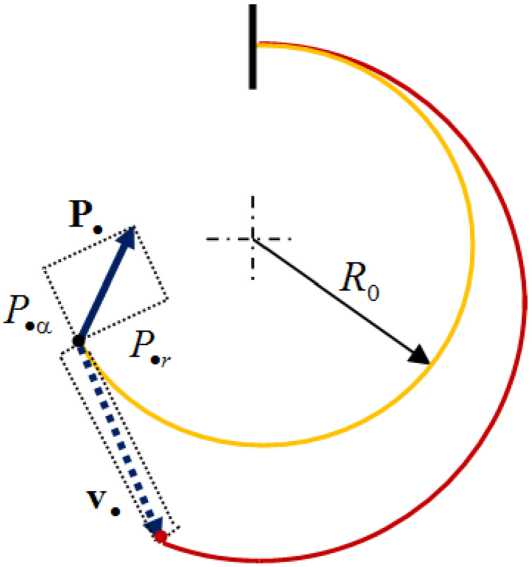
Рис. 2. Начальная и деформированная формы пьезоэлектрического актюатора, где R 0 – начальный радиус кривизны, P • – блокирующая сила, v • – перемещение свободного торца консоли при приложении электрического напряжения U con
Fig. 2. Initial and deformed shapes of the piezoelectric actuator, where R 0 is an initial radius of curvature, P • is a blocking force, v • is a displacement of the free end of the cantilever when an voltage U con is applied
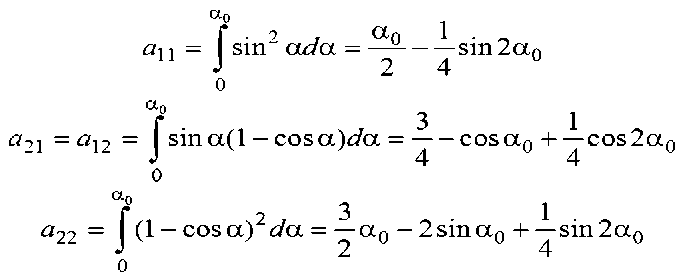

при этом полная величина блокирующего усилия ^» у Р»т + ^«а . Решение (8) получено с ис- пользованием интегралов Мора, представления грузового изгибающего момента MzP в виде разложения
Mzp = [^r Sin а + ^а О “ COS а)К по длине консоли от действия на свободном торце силы P• с компонентами P•r, P•α (рис. 2) и вспомогательных равенств
с учетом вида вспомогательных моментов ^^zl , м z~> (6). Коэффициенты деформационной ζ v и силовой блокирующей ζ P эффективности
Ц^у.!у. Qp=P./P
криволинейного пьезоэлектрического актюатора (рис. 2) рассчитываем с использованием вспомогательных решений для прогиба и блокирующей силы

на свободном торце прямолинейной биморфной консоли с поляризацией пьезоэлектрических пластин биморфа по толщине, т.е. по оси y . Решения V , р получены из рассмотрения задач чистого и поперечного изгибов прямолинейного стержня соответственно и могут быть записаны в виде
с учетом выражения изгибающего момента
Mz =bh?e2ll^ = ±bhpe2llUcon (11)
как момента пары нормальных пьезоэлектрических сил, действующего в поперечном сечении биморфа, где h 1 = hp /2 – толщина каждого слоя – плечо пары сил, Jz =bh*/12 – осевой момент инерции прямоугольного поперечного сечения биморфа. Считаем, что толщина прямолинейного двухслойного биморфа h bim = hp (рис. 1), hp /2 – расстояние и U con – управляющее электрическое напряжение между взаимодействующими внутренними и наружными поверхностными электродами. Отметим, что решение для прогиба V (10) совпадает с известным решением [37] в приближении e 211 / Ex ≈ d 211 .
Результаты численного моделирования
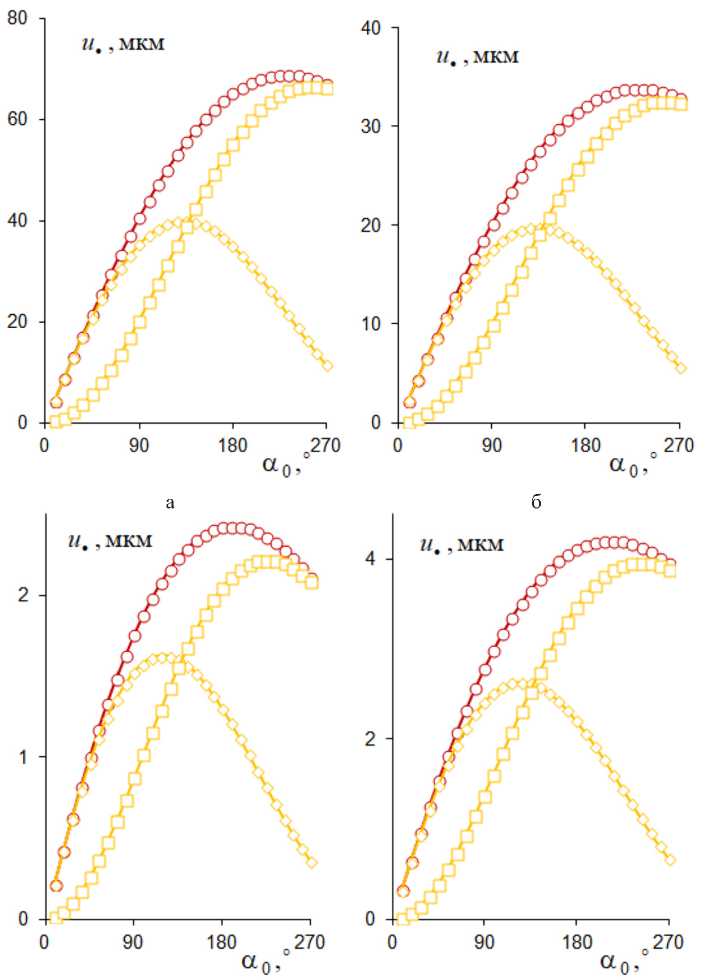
Электроупругие характеристики пьезоэлектрического слоя были заданы через продольный Ex = 61.5 ГПа и поперечный Ey = 53.4 ГПа модули Юнга, пьезомодули d 222 = 373 пКл/Н, e 211 = 5.4 Кл/м2 керамики PZT-5. Величина приложенного к выходам электродов (рис. 1) управляющего электрического напряжения U con =1500 В. Для составного поперечного сечения (рис. 1б) модуль Юнга вспомогательных верхнего и нижнего упругих слоев приравнен к продольному модулю Ex =61.5 ГПа пьезокерамики. На рис. 3 и 4 в виде графиков представлены результаты расчета зависимостей радиальных u • r , P • r , окружных u •α, P •α компонент и абсолютных значений u • , P • векторов перемещения v • (рис. 3) и блокирующей силы P • (рис. 4) от угла охвата α0 при фиксированном значении длины l = 100 мм дугообразной консоли (рис. 2) с учетом выражения радиуса R 0 = l /α 0 начальной кривизны ее продольной оси. Ширина поперечного сечения b =5 мм (рис. 1), толщина пьезоэлектрического слоя hp =1 мм или 2 мм или 20 мм (рис. 1а), а для составного поперечного сечения (рис. 1б) были заданы значения: hp =2 мм, h =20 мм. Дополнительно на рис. 4в, г приведены значения блокирующей силы p (10) для прямолинейного биморфа с различными значениями 2 мм, 20 мм его толщины h bim для сравнения со значениями блокирующей силы P • криволинейного актюатора (рис. 1 и 2).
80 п
60 -
40 -
20 - а и,, мкм и., мкм
б и,, мкм и,, мкм
180 270
а0,
180 270
а0,
180 270
а05
180 270
а0> в г
Рис. 3. Зависимости радиальной u • r (◊) и окружной u •α (□) компонент перемещения u • (○) от угла охвата консоли α 0 при h p = h =1 мм (а), 2 мм (б), 20 мм (в), h p =2 мм, h =20 мм (г)
Fig. 3. Radial u • r (◊) and circumferential u •α (□) components of displacement u • (○) vs cantilever angle α 0 at h p = h = 1 mm (a), 2 mm (б), 20 mm (в), h p = 2 mm, h = 20 mm (г)
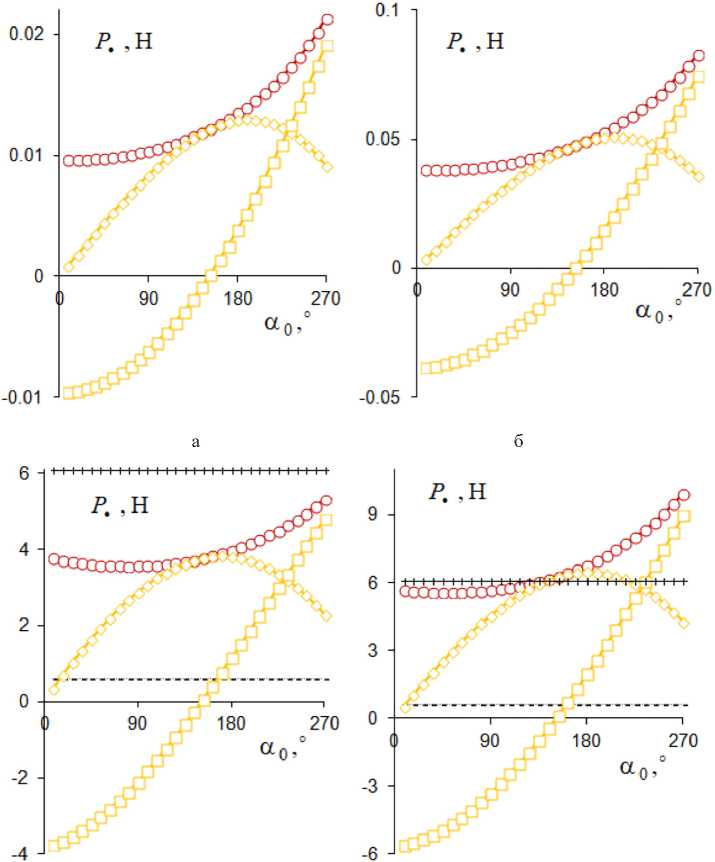
Рис. 4. Зависимости радиальной P • r (◊) и окружной P •α (□) компонент силы P • (○) от угла охвата консоли α 0 при h p = h =1 мм (а), 2 мм (б), 20 мм (в), h p =2 мм, h =20 мм (г) в сравнении со значениями для прямолинейного биморфа толщиной h bim =2 мм (–), 20 мм (+)
Fig. 4. Radial P • r (◊) and circumferential P •α (□) components of force P • (○) vs. cantilever angle α0 at h p = h = = 1 mm (a), 2 mm (б), 20 mm (в), h p = 2 mm, h = 20 mm (г) vs. straight-line bimorph at thickness h bim = 2 mm (–), 20 mm (+)
Выводы
Разработана математическая модель деформирования криволинейного пьезоэлектрического актюатора изгибного типа на основе эффекта взаимодействия двух связанных процессов: активного – управляемого пьезоэлектрического трансформирования – изменения высоты поперечного сечения и реактивного – перехода актюатора к новой равновесной криволинейной форме. Выявлено, что для «простого» (рис. 1а) пьезоэлектрического актюатора в виде однородного пьезоэлектрического дугообразного стержня (рис. 2) имеем рост величины блокирующей – 14 – силы P• с увеличением толщины hp пьезоэлектрического слоя, в частности, от значения ≈0.02 Н при hp =1 мм (рис. 4а) до значения ≈5 Н при hp =20 мм (рис. 4в) при угле обхвата α0 = 270° консоли (рис. 2); при этом величина перемещения u• свободного торца консоли убывает с увеличением толщины hp пьезоэлектрического слоя (рис. 3). Имеем немонотонную зависимость величины перемещения u• (рис. 3) и практически монотонно возрастающую зависимость величины блокирующей силы P• (рис. 4) от угла обхвата α0 консоли в исследуемом диапазоне значений (0°; 270°). Из сравнения характеристик u• (рис. 3в, г), P• (рис. 4в, г) подобных пьезоэлектрических криволинейных актюаторов с простым (рис. 1а) и составным (рис. 1б) поперечными сечениями одинаковой 20 мм толщины установлено, что наличие дополнительных слоев в составном сечении (рис. 1б) приводит к увеличению значений обеих характеристик u•, P•, что обусловлено более высокими (по сравнению с простым сечением на рис. 1а) значениями напряженности электрического поля из-за меньшего расстояния между электродами пьезоэлектрического слоя при одинаковом значении управляющего электрического напряжения Ucon. Установлено (рис. 4г), что для случая составного (рис. 1б) поперечного сечения и значений угла α0 > 135° величина блокирующей силы P• для криволинейного актюатора превышает соответствующее значение силы p (10) для прямолинейного биморфного актюатора при толщине биморфа hbim = hp (рис. 1), расстоянии hp/2 между внутренним и наружными электродами и управляющем электрическом напряжении Ucon.
Список литературы Криволинейный пьезоэлектрический актюатор изгибного типа
- Tzou HS. Piezoelectric Shells (Distributed Sensing and Control of Continua). Kluwer Academic Publishers, 1993. 320.
- Rubio WM., Vatanabe SL., Paulino GH., et al. Functionally Graded Piezoelectric Material Systems – A Multiphysics Perspective. 301–339. Advanced Computational Materials Modeling: From Classical to Multi-Scale Techniques. Edited by Eduardo A. de Souza Neto, and Pablo A. Munoz-Rojas. WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim. 2011.
- Piezoelectric Materials and Devices – Practice and Applications / Edited by Farzad Ebrahimi. IntechOpen, 2013. 176. http://dx.doi.org/10.5772/45936
- Уорден К. Новые интеллектуальные материалы и конструкции. Свойства и применение. М.: Техносфера, 2006. 224. [Uorden K. New intelligent materials and structures. Properties and application. Moscow: Tekhnosfera, 2006. 224. (in Rus.)]
- Берлинкур Д., Керран Д., Жаффе Г. Пьезоэлектрические и пьезомагнитные материалы и их применение в преобразователях. Физическая акустика. Т. 1: Методы и приборы ультразвуковых исследований. Часть А. М.: Мир, 1966. 204–326. [Berlinkur D., Kerran D., ZHaffe G. Piezoelectric and piezomagnetic materials and their application in transducers. Physical acoustics. T. 1: Ultrasound methods and instruments. Part A. Moscow: Mir, 1966. 204–326. (in Rus.)]
- Каралюнас РИ. Эффективные термопьезоэлектрические свойства слоистых композитов. Механика композитных материалов. 1990. 5. 823–830. [Karalyunas RI. Effective thermal and electrical properties of layered composites. Mekhanika kompozitnyh materialov. 1990. 5. 823–830. (in Rus.)]
- Гетман ИП. О магнитоэлектрическом эффекте в пьезокомпозитах. ДАН СССР. 1991. 317(2). 1246–1259. [Getman IP. On the magnetoelectric effect in piezocomposites. DAN SSSR. 1991. 317(2). 1246–1259. (in Rus.)]
- Коган ЛЗ., Мольков ВА. Магнитоэлектрические свойства волокнистых пьезокомпозитов. Изв. РАН. Механика твердого тела. 1996. 5. 62–68. [Kogan LZ., Mol’kov VA. Magnetoelectric properties of fibrous piezocomposites. Izv. RAN. Mekhanika tverdogo tela. 1996. 5. 62–68. (in Rus.)]
- Gorbachev VI. Integral formulas in electromagnetic elasticity of heterogeneous bodies. application in the mechanics of composite materials. Composites: Mechanics, Computations, Applications. An International J. 2017. 8(2). 147–170.
- Han JM., Adriaens TA., Koning WL., et al. Modelling Piezoelectric Actuators. IEEE/ASME Transactions on Mechatronics. 2000. 5(4). 331–331.
- Ivan IA., Rakotondrabe M., Lutz P., et al. Quasistatic displacement self-sensing method for cantilevered piezoelectric actuators. Review of Scientific Instruments. American Institute of Physics. 2009. 80(6). 065102–1/065102–8.
- Софронов А., Никифоров В., Климашин В. Биморфные пьезоэлектрические элементы: актюаторы и датчики. Компоненты и технологии. 2003. 30(4). 46–48. [Sofronov A., Nikiforov V., Klimashin V. Bimorph piezoelectric elements: actors and sensors. Komponenty i tekhnologii. 2003. 30(4). 46–48. (in Rus.)]
- Zhu D., Almusallam A., Beeby SP., et al. A bimorph multi-layer piezoelectric vibration energy harvester. PowerMEMS. 2010. Leuven, Belgium. 1–4.
- Bansevičius R., Navickaitė S., Jūrėnas V., et al. Investigation of novel design piezoelectric bending actuators. Journal of Vibroengineering. 2013. 15(2). 1064–1068.
- Ватульян АО., Гетман ИП., Лапицкая НБ. Об изгибе пьезоэлектрической биморфной пластины. Прикладная механика. 1991. 27(10). 101–105. [Vatul’yan AO., Getman IP., Lapickaya NB. On bending of a piezoelectric bimorph plate. Prikladnaya mekhanika. 1991. 27(10). 101–105. (in Rus.)]
- Ватульян АО., Рынкова АА. Об одной модели изгибных колебаний пьезоэлектрических биморфов с разрезными электродами и ее приложениях. Известия РАН МТТ. 2007. 4. 114–122. [Vatul’yan AO., Rynkova AA. About one model of bending oscillations of piezoelectric bimorfs with split electrodes and its applications. Izvestiya RAN MTT. 2007. 4. 114–122. (in Rus.)]
- Патент РФ № 2099754. Деформируемое зеркало на основе многослойной активной биморфной структуры. Йелстаун Корпорейшн Н. В. Дата публикации: 20.12.1997. [Patent RF № 2099754. Deformable Mirror Based on Multilayer Active Bimorph Structure. Jelstaun Korporejshn N. V. Data publikacii: 20.12.1997. (in Rus.)]
- Антоняк ЮТ., Вассергисер МЕ. Расчет характеристик изгибного пьезоэлектрического преобразователя мембранного типа. Акустический журнал. 1982. 28(3). 294–302. [Antonyak YU.T., Vassergiser M. E. Calculation of the characteristics of a membrane-type bending piezoelectric transducer. Akusticheskij zhurnal. 1982. 28(3). 294–302. (in Rus.)]
- Аронов БС. Электромеханические преобразователи из пьезоэлектрической керамики. Л.: Энергоатомиздат. 1990. 270. [Aronov BS. Electromechanical converters from piezoelectric ceramics. Leningrad: Energoatomizdat. 1990. 270. (in Rus.)]
- Williams CB., Yates RB. Analysis of a microelectric generator for Microsystems. Sensors and Actuators A: Physical. 1996. 52(1–3). 8–11.
- Аббакумов КЕ., Коновалов РС., Цаплев ВМ. Экспериментальное исследование дискового биморфного пьезоэлектрического генератора. Известия СПбГЭТУ «ЛЭТИ». 2014.
- 9. 59–63. [Abbakumov KE., Konovalov RS., Caplev VM. Experimental study of a disk bimorph piezoelectric generator. Izvestiya SPbGETU «LETI». 2014. 9. 59–63. (in Rus.)]
- Liu H., Zhong J., Lee C., et al. A comprehensive review on piezoelectric energy harvesting technology: Materials, mechanisms, and applications. Applied Physics Reviews. 2018. 5(4). 041306; https://doi.org/10.1063/1.5074184
- Васильев ВА., Веремьёв ВА., Тихонов АИ. Влияние частотных факторов и параметров на информативный сигнал пьезоэлектрических датчиков давления. Датчики и системы. 2003. 8. 5–9. [Vasil’ev VA., Verem’yov VA., Tihonov AI. Influence of frequency factors and parameters on the informative signal of piezoelectric pressure sensors. Datchiki i sistemy. 2003. 8. 5–9. (in Rus.)]
- Шарапов ВМ., Мусиенко МП., Шарапова ЕВ. Пьезоэлектрические датчики. М.: Техносфера. 2006. 632. [SHarapov VM., Musienko MP., SHarapova EV. Piezoelectric sensors. Moscow: Tekhnosfera. 2006. 632. (in Rus.)]
- Mouhli M. Analysis and shape modeling of thin piezoelectric actuators. Virginia Commonwealth University. 2005. 100. https://scholarscompass.vcu.edu/etd/1552
- Панич АЕ. Пьезокерамические актюаторы. Ростов на Дону: РГУ. 2008. 159. [Panich AE. Piezoceramic actuators. Rostov na Donu: RGU. 2008. 159. (in Rus.)]
- Yamada H., Sasaki M., Nam Y. Active vibration control of a micro-actuator for hard disk drives using self-sensing actuator. Journal of Intelligent Material Systems and Structures. 2008. 19(1). 113–123.
- El-Sayed AM., Abo-Ismail A., El-Melegy MT., et al. Development of a micro-gripper using piezoelectric bimorphs. Sensors. 2013. 13. 5826–5840. doi:10.3390/s130505826
- Бардин ВА., Васильев ВА., Чернов ПС. Современное состояние и разработки актюаторов нано- и микроперемещений. Труды международного симпозиума «Надежность и качество». 2014. 2. 123–127. [Bardin VA., Vasil'ev VA., CHernov PS. The current state and development of nano-and micro-displacement actors. Trudy mezhdunarodnogo simpoziuma “Nadezhnost’ i kachestvo”. 2014. 2. 123–127. (in Rus.)]
- Бардин ВА., Васильев ВА. Актюаторы нано- и микроперемещений для систем управления, контроля и безопасности. Современная техника и технологии. 2014. 2. 1–5. [Электронный ресурс]. https://technology.snauka.ru/2014/02/3057. [Bardin VA., Vasil’ev VA. Nano- and micro-displacement actors for control, control and safety systems. Sovremennaya tekhnika i tekhnologii. 2014. 2. 1–5. [Elektronnyj resurs]. https://technology.snauka.ru/2014/02/3057. (in Rus.)]
- Zhou J., Dong L., Yang W. A Double-Acting Piezoelectric actuator for helicopter active rotor. Actuators. 2021. 10(247). 1–15. https:// doi.org/10.3390/act10100247
- Abedian B., Cundari M. Resonant frequency of a polyvinylidene flouride piezoelectric bimorph: the effect of surrounding fluid. Proc. SPIE 1916, Smart Structures and Materials 1993: Smart Materials, 23 July 1993. https://doi.org/10.1117/12.148486
- Патент RU № 2723567. Лопасть воздушного винта с управляемой геометрией профиля. Паньков АА., Аношкин АН., Писарев ПВ., опубл.: 16.06.2020 Бюл. № 17, заявка № 2019137042 от 18.11.2019 г. [Patent RU № 2723567. Propeller blade with controlled profile geometry. Pan’kov AA., Anoshkin AN., Pisarev PV., opubl.: 16.06.2020 Byul. № 17, zayavka № 2019137042 ot 18.11.2019. (in Rus.)]
- Патент RU № 2819557. Пьезоактюатор изгибного типа. Паньков АА., опубл.: 21.05.2024 Бюл. № 15, заявка № 2023128935 от 08.11.2023 г. [Patent RU № 2819557. Piezoactuator of bending type. Pan'kov AA., opubl.: 21.05.2024 Byul. № 15, zayavka № 2023128935 ot 08.11.2023. (in Rus.)]
- А.с. Пьезоактюатор изгибного типа. Паньков А. А., заявка № 2024106328 от 12.03.2024 г. [A.s. Piezoactuator of bending type. Pan’kov A. A., zayavka № 2024106328 ot 12.03.2024. (in Rus.)]
- Патент RU № 2822976. Пьезоактюатор изгибного типа. Паньков А. А., опубл.: 16.07.2024 Бюл. № 20; заявка № 2024100462 от 11.01.2024 г. [Patent RU № 2822976. Piezoactuator of bending type. Pan’kov A. A., opubl.: 16.07.2024 Byul. № 20, zayavka № 2024100462 ot 11.01.2024. (in Rus.)]
- Wang Q. M., Cross L. E. Constitutive equations of symmetrical triple layer piezoelectric benders. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 1999. 46. 1343–1351.
