Лазерная интегрированная инерциально-спутниковая навигационная система с расширенной доступностью спутниковых измерений

Автор: Фомичев А.А., Ларионов П.В., Полукеев Е.А., Вахитов Т.Н., Колчев А.Б., Счастливец К.Ю., Успенский В.Б.
Журнал: Труды Московского физико-технического института @trudy-mipt
Рубрика: Аэрокосмические исследования
Статья в выпуске: 4 (20) т.5, 2013 года.
Бесплатный доступ
Описаны результаты разработки и исследования лазерной интегрированной инерциально-спутниковой навигационной системы с расширенной доступностью спутниковых измерений. Приводится общая характеристика системы, описание информационных режимов ее работы, архитектура программно-алгоритмического обеспечения. Обсуждаются проблемы фильтрации и коррекции при неравномерном поступлении измерений различного состава, предложены структурно-алгоритмические решения этих проблем. Приводятся результаты мобильных испытаний, летной апробации программно-математического обеспечения системы, результаты полунатурных и летных испытаний.
Лазерный гироскоп, интегрированная инерциальноспутниковая система, доступность спутниковой информации, субинтегрированный режим
Короткий адрес: https://sciup.org/142185946
IDR: 142185946 | УДК: 621.391
Текст научной статьи Лазерная интегрированная инерциально-спутниковая навигационная система с расширенной доступностью спутниковых измерений
Создание интегрированных навигационных систем для гражданской авиации нового поколения является одним из приоритетных направления отечественного приборостроения. В соответствии с концепцией RNP [1] в настоящее время к бортовым навигационным системам (НС) самолетов гражданской авиации предъявляются высокие требования по точности, доступности, целостности и непрерывности функционирования, нормированные для различных участков полета. Обеспечить выполнение этих требований в полном объеме возможно только при совместном использовании (комплексировании) инерциальной и спутниковой информации. В связи с этим общей тенденцией для современных НС является интеграция инерциальной подсистемы и приемника сигналов спутниковых радионавигационных систем (СРНС) в рамках единой, конструктивно обособленной единицы. Такая интеграция сопровождается, в свою очередь, внедрением в программно-математическое обеспечение (ПМО) НС алгоритмов комплексирования инерциальной и спутниковой информации.
Судя по известным образцам НС, сегодня можно говорить о двух подходах к подобной интеграции. Первый подход основан на. использовании высокоточной инерциальной системы с реализацией в ней дополнительной функции выработки гибридных (комплексирован-ных) параметров скорости и положения, например, как в LTN-101E (Northrop Grumman), HG2030AD (Honeywell), БИНС-СП (МИЭА) и др. Такие системы, квалифицируемые как «инерциальные навигационные системы» (ИНС), наиболее полно удовлетворяют требованиям RNP, но их высокая стоимость сужает область их применения. Отличительной особенностью алгоритмов комплексирования, реализованных в них, является коррекция навигационных параметров по разомкнутой схеме, сохранение информационного канала, инерциального счисления, ограниченные возможности по адаптации моделей погрешности инерциальных датчиков. Второй подход связан с использованием в НС инерциальных датчиков среднего и низкого класса точности [2, 3]. При наличии достаточного количества радиови-димых навигационных спутников такие системы демонстрируют высокую точность определения скорости и местоположения, сопоставимую с точностью СРНС; обладают полнотой вырабатываемых навигационных, угловых и динамических параметров и высокой частотой их обновления; имеют сравнительно невысокую стоимость, что способствует их внедрению в различные области применения для широкого класса объектов. По принятой классификации навигационного оборудования такие системы могут квалифицироваться как «курсовер-тикали», и к ним применим не стандартизированный, но общепринятый термин интегрированные инерциадино-спутниковые навигационные системы (ИИСНС). Роль алгоритмов комплексирования инерциальных и спутниковых измерений в обеспечении функциональности таких систем существенно возрастает. Реализованные в них алгоритмы, как правило, имеют более сложную структуру: постоянно корректируемый расширенный вектор состояния, включающий угловые параметры и погрешности инерциальных измерений; алгоритмы многоуровневого контроля внешних измерений и обеспечения целостности фильтра; алгоритмы адаптации навигационного фильтра в условиях перерывов спутниковой информации и т.д. Основным недостатком таких систем сегодня является быстро нарастающая погрешность определения скорости и координат при длительном отсутствии спутниковых измерений. Поэтому использование на самолетах автономного режима работы ИИСНС, как основного средства навигации, нормируется допустимой продолжительностью перерывов спутниковой информации. Мощным инструментом повышения точности функционирования ИИСНС является технология AIME (Autonomous Integrity Monitored Extrapolation) [4], разработанная фирмой Litton Aero Products. Ее использование позволяет при наличии спутниковой информации в полете оперативно оценивать погрешность инерциальных датчиков и компенсировать ее в автономных перерывах. Использование такой технологии, в частности, существенно снижает требования к гироскопам в части невоспроизводимо-сти дрейфа «от запуска к запуску», поскольку такая составляющая дрейфа может быть оценена и скомпенсирована в данном сеансе работы.
Таким образом, повышение эффективности ИИСНС в настоящее время достигается реализацией двух встречных процессов: совершенствованием используемых инерциальных датчиков и повышением доступности спутниковых измерений, в том числе при неполном рабочем созвездии СРНС. Компромиссный характер такого подхода способен обеспечить оптимальное соотношение между качеством и стоимостью навигационной системы.
Статья посвящена результатам разработки и испытаний интегрированной инерциальноспутниковой навигационной системы НСИ-2000МТС на лазерных гироскопах ЛГК-200 с расширенной доступностью спутниковых измерений. Основанием для разработки является федеральная целевая программа «Развитие гражданской авиационной техники России на 2002-2010 годы и на период до 2015 года» с целью глубокой модернизации и унификации оборудования самолетов Ту-204СМ.
II. Оценка доступности сигналов СРНС ГЛОНАСС
Одной из целей, стоящих перед разрабатываемой системой, является повышение доступности сигналов навигационных спутников ГЛОНАСС для использования в ИИСНС.
На официальном сайте Информационно-аналитического центра ГЛОНАСС [5] приводится оперативно обновляемая информация о целостности и доступности СРНС ГЛОНАСС для решения навигационных задач. Как показывает опыт, для авиационных применений такая информация не вполне объективно отражает доступность высокоточных навигационных определений по спутниковым измерениям. В этих условиях для уточненной оценки доступности спутниковой навигации требуемой точности вводится следующий критерий: максимальная в сутках длительность интервала, в течение которого величина так называемого геометрического фактора PDOP превышает предельно допустимое значение при заданном угле возвышения. Как показывают расчеты, для СРНС ГЛОНАСС при 24-х функционирующих спутниках имеет место целая полоса на поверхности Земли, где такой перерыв достигает 10-15 минут, и отдельные районы, где перерыв составляет 40-45 минут (рис. 1). При этом суммарная длительность перерыва на суточном интервале в некоторых районах достигает 50-60 минут. Ситуация меняется в худшую сторону при возможном уменьшении числа, функционирующих спутников.
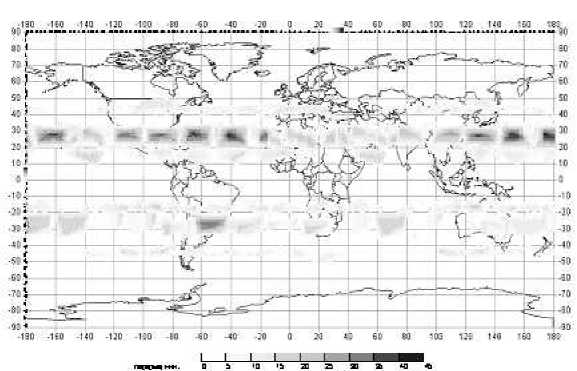
Рис. 1. Максимальный перерыв в навигации авиационного потребителя по системе ГЛОНАСС
Учитывая сказанное, повышение доступности спутниковой информации для использования в ИИСНС является достаточно значимой задачей при полном созвездии СРНС и критически важной при возможном сокращении рабочего созвездия. Такая функция ИИСНС не только способствует выполнению требований RNP по точности и доступности навигации в условиях нарушения навигационного покрытия СРНС, но и повышает отказобезопасность пилотажно-навигационного комплекса, в целом.
III. Общая характеристика и описание информационных режимов работы НСИ-2000МТС
Разработанная лазерная интегрированная инерциально-спутниковая навигационная система HCH-2000MTG (рис. 2) является модернизацией интегрированной навигационной системы НСИ-2000МТ и состоит из инерциального блока (ИБ), блока обработки информации (БОИ), антенны сигналов СРНС. Измерительный сегмент системы включает три зеемановских лазерных гироскопа, три акселерометра, аппаратуру потребителя спутниковой навигации (АПСН) ГЛОНАСС/GPS.

Рис. 2. Внешний вид HCH-2000MTG (блоки ИБ и БОИ в рамах монтажных)
В качестве внешних измерений система, использует информацию от собственной АПСН в виде готового решения, полученного по сигналам ГЛОНАСС или по сигналам GPS/ГЛОНАСС, либо в виде «сырых» данных от 2-3 спутников ГЛОНАСС; измерения баровысоты и истинной воздушной скорости, получаемые от системы воздушных сигналов (СВС). Коррекция расширенного вектора состояния системы осуществляется с частотой 1 Гц. В зависимости от состава, измерений, актуальных на. момент коррекции, в ИИСНС реализуются следующие информационные режимы работы:
-
- интегрированный: коррекция расширенного вектора, состояния по готовому решению, получаемому от АПСН по сигналам смешанного созвездия ГЛОНАСС/GPS либо только ГЛОНАСС;
-
- субинтегрированный: коррекция расширенного вектора состояния по измерениям псевдодальности и радиальной скорости, получаемым от АПСН для 2-3 спутников ГЛОНАСС;
-
- автономный: спутниковая коррекция отсутствует.
Во все режимах для коррекции используются также измерения баровысоты. Переход между режимами осуществляется автоматически в соответствии с фактическим состоянием видимого созвездия спутников.
Введение субинтегрированного режима коррекции является важным элементом ПМО системы и позволяет повысить доступность спутниковых измерений при неполном рабочем созвездии. При этом в зависимости от состояния и стабильности шкалы времени АПСН для коррекции вектора состояния реализуется либо дальномерный, либо разностнодальномерный метод. В первом случае в качестве измерений используются радиальные дальности и радиальные скорости относительно 2-3 радиовидимых спутников ГЛОНАСС, во втором - разности одноименных параметров для пар спутников. Преимущество использования субинтегрированного режима по сравнению с интегрированным при наличии готового решения с повышенным значением PDOP обуславливается следующим фактором: разностные измерения инвариантны к ошибке таймера АПСН, которая возрастает при увеличении PDOP, а также в разностных измерениях снижается влияние системных погрешностей и погрешности распространения сигналов из-за частичной их компенсации. Несмотря на неполную информативность измерений в условиях субинтегрированного режима, его эффективность достаточно высокая, что продемонстрировано в [7] и подтверждается результатами испытаний.
Таким образом, в системе реализовано попеременное использование двух типов спутниковых данных: готового решения (при его наличии) и «сырых» данных от 2-3 спутников [8]. Такая стратегия, с одной стороны, открывает возможность использования спутниковых измерений при отсутствии или недостоверности готового решения, с другой стороны, позволяет рационально использовать ресурсы вычислителя при продуктивной работе АПСН.
Основные технические и эксплуатационные характеристики HCH-2000MTG приведены в табл. 1.
Таблица!
Основные характеристики системы
|
Точность системы (95%) |
||
|
Координаты |
Интегрированный режим |
100 м |
|
Субинтегрированный режим (не менее 2 спутников ГЛОНАСС) |
500 м |
|
|
Автономный режим |
3,8 км за 1 ч полета |
|
|
Скорость |
Интегрированный режим |
3,7 км/ч |
|
Субинтегрированный режим |
6,5 км/ч |
|
|
Автономный режим |
18,5 км/ч |
|
|
Истинный курс |
Интегрированный / субинтегрированный режим |
1 ° |
|
Автономный режим |
1,25 ° |
|
|
Углы тангажа и крена |
0,2 ° |
|
|
Путевой угол |
Интегрированный режим |
0,5 ° |
|
Субинтегрированный режим |
2,0 ° |
|
|
Автономный режим |
3,5 ° |
|
|
Угловые скорости |
0,1 о/с |
|
|
Перегрузки |
0,01g |
|
|
Инерциальная вертикальная скорость |
9,1 м/мин |
|
|
Готовность (переход в Навигацию) |
10 мин ( Т > 0 °C) 18 мин ( Т < 0 °C |
|
|
Соответствие квалификационным требованиям |
||
|
Внешние воздействующие факторы |
KT-160D |
|
|
ПМО |
КТ-178В (уровень А) |
|
|
Спецификации |
||
|
Габариты |
ИБ-MTG (412 х 194 х 124 мм), БОИ-МТС (386 x 200 х 94,5мм) |
|
|
Масса. |
16,5 кг |
|
|
Электропитание (потребляемая мощность) |
90 Вт |
|
|
Наработка, на. отказ, не менее |
10 000 ч |
|
|
Время непрерывной работы |
24 ч |
|
IV. Архитектура и особенности программно-алгоритмического обеспечения НСИ-2000МТС
Опишем состав и взаимодействие алгоритмов верхнего уровня ПМО-системы:
-
- алгоритмы первичной обработки и контроля входной информации, обеспечивающие вычисление приращений кажущегося поворота, и кажущейся скорости по данным от ИБ согласно математической модели; вычисление псевдодальности до видимых навигационных спутников и ее производной по «сырым» данным, поступающим от АПСН; контроль входных данных по простейшим критериям: на. диапазон, гладкость, повторяемость и т.д.;
-
- алгоритмы подготовки начальных данных для навигации, реализующие горизонтиро-вание, гирокомпасирование, калибровку гироскопов и акселерометров на. этапе выставки;
-
- алгоритмы инерциального счисления (алгоритмы БИНС), включающие в себя алгоритм определения ориентации, алгоритм вычисления линейной скорости и координат объекта по измерениям ИБ;
-
- алгоритмы комплексирования данных и коррекции, включающие алгоритмы проверки непротиворечивости данных от различных источников и контроля состояния фильтра; навигационный фильтр и алгоритм коррекции расширенного вектора, состояния системы с учетом задержки информации; вспомогательные калмановские фильтры малой размерности для коррекции вертикального канала, системного времени и смещения баровысоты относительно геодезической; вспомогательные цифровые частотные фильтры для сглаживания корректирующих поправок;
-
- алгоритмы формирования выходных данных, включающие вычисление, сглаживание и кодирование выдаваемых во внешние системы навигационных параметров с признаками их достоверности; вычисление CKO-ошибок основных навигационных параметров и сигнализация об отказах (целостность системы); формирование служебных слов и телеметрической информации.
Алгоритмы комплексирования данных и коррекции (АКДК) функционируют с частотой 1 Гц в низкоприоритетном вычислительном канале, остальные алгоритмы - с частотой 100 Гц. Собственно коррекция осуществляется путем обновления текущего вектора, состояния системы с учетом корректирующих поправок, формируемых в расширенном фильтре Калмана (ФК). В расширенный вектор состояния включены как основные навигационные параметры (координаты, скорость, параметры ориентации), так и параметры компенсирующих моделей погрешностей измерений гироскопов и акселерометров. Математическое описание используемых моделей и алгоритма фильтрации приведено в [9], особенности субинтегрированного режима описаны в [7]. Отметим, что оперативная идентификация параметров дрейфа гироскопов (аналог технологии AIME) позволяет существенно уменьшить влияние неопределенности величины дрейфа, установившегося в данном запуске, на точность работы системы в автономном режиме. Изменчивость дрейфа в запуске, обусловленная тепловыми процессами, компенсируется с помощью сплайновой модели дрейфа от измеряемых температурных параметров [10].
Одним из недостатков интегрированных систем с замкнутой схемой коррекции является отсутствие параметров инерциального счисления, что недопустимо для средств навигации высшего уровня критичности. Для устранения этого недостатка в HCII-2000MTG параллельно с корректируемым каналом реализован отдельный канал инерциального счисления. Вычисляемые в нем углы тангажа и крена поступают на выход системы. Таким образом достигается независимость формируемых системой параметров вертикали от спутниковой информации, необходимая для средств навигации требуемого уровня критичности. Описанная схема формирования выходных данных ИИСНС соответствует концепции, закрепленной в [11].
Навигационный фильтр является ядром алгоритмического обеспечения ИИСНС. Специфические условия функционирования ИИСНС, связанные с неравномерным поступлением внешних измерений, их переменным составом, возможностью длительного отсутствия спутниковых измерений, могут приводить к негативным эффектам в процессах фильтрации и коррекции. Перечислим некоторые из них:
-
- кратковременное возрастание погрешности определения скорости, координат и их оценочных дисперсий при переходе от интегрированного к субинтегрированному режиму коррекции;
-
- физически не обоснованное влияние измерений баровысоты на оценку параметров дрейфа, формируемых в фильтре, в условиях длительного отсутствия спутниковой информации;
-
- скачкообразное изменение, возможно с перерегулированием, корректируемого вектора состояния при восстановлении коррекции по спутниковой информации после длительного перерыва;
-
- медленное уменьшение вектора невязок в фильтре при восстановлении интегрированного режима.
Основные причины указанных эффектов следующие:
-
- снижение адекватности линеаризованной модели ошибок, используемой в ковариационном блоке фильтра на шаге экстраполяции, в условиях длительного отсутствия корректирующих измерений;
-
- значительные переходные процессы в фильтре при восстановлении коррекции после длительного перерыва;
-
- несовместимость моделей ошибок вектора измерений различного состава, изменение информативности состава измерений при переходе из одного режима коррекции в другой;
-
- несоответствие параметров моделей входных возмущений и помех, используемых в фильтре, их фактическим значениям.
Принимая во внимание объективность причин снижения эффективности ИИСНС в оговоренных выше условиях, а также невозможность их устранения, в ИМО реализованы следующие мероприятия для блокирования негативных эффектов:
-
- введение трех параллельных информационных каналов обработки инерциальных измерений с различной степенью коррекции вектора состояния в них;
-
- распределение процедуры формирования выходных навигационных параметров между информационными каналами с различной степенью коррекции;
-
- изоляция процесса коррекции вектора состояния с помощью ФК высокой размерности внутри одного информационного канала, называемого сильно корректируемым и непосредственно не связанного с выходом системы;
-
- формирование координат, скорости и угла курса системы с помощью информационного канала, в котором по окончании переходных процессов в фильтре реализуется «под-
- тягивание» к вектору состояния сильно корректируемого канала;
-
- эвристический подбор настроек фильтра.
Перечисленные мероприятия касаются как архитектуры программно-алгоримического обеспечения, так и параметрической настройки алгоритмов.
Инерцңалж bit блок
ЕІЕІЗИІЕТО-
Ел вврревцик Ейртикального канала
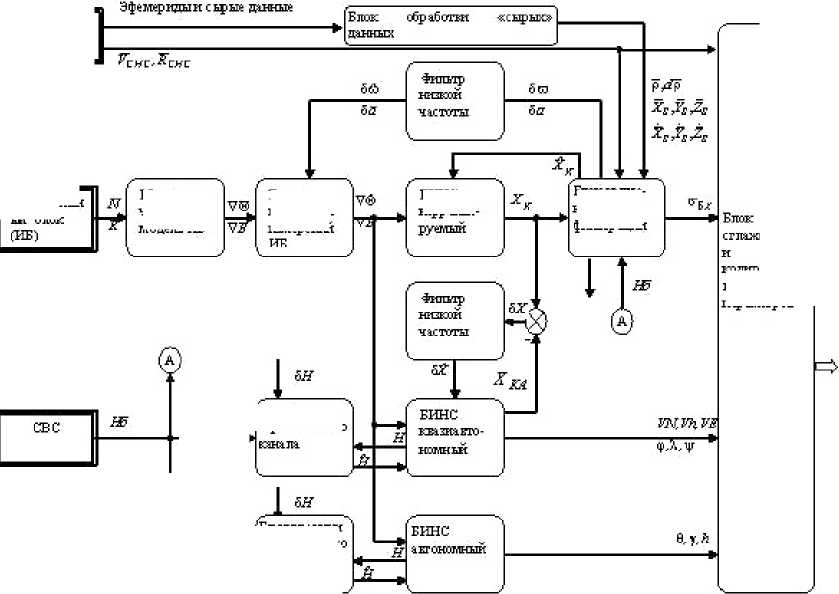
Рис. 3. Схема, информационных связей основных алгоритмов системы

МіТСГіЮТІ-
мотга ИЕ
коррекции измерении
БИНС ксрр свои-
Блок валки-
но вс кои
ІИЛЫТьЩЕПІ
КОДИрОЕ'£НЕСЯ выходных параметров
Блюоррекцик ' ЕфППаЛЬНОТО
Структура, информационных связей основных алгоритмов ПМО НСИ-2000МТС в режиме Навигация отображена, на. рис. 3. На рисунке использованы следующие обозначения: N , R - информационные импульсы, получаемые от трех гироскопов и трех акселерометров, пропорциональные вектору угла, кажущегося поворота, и вектору кажущейся скорости; VO, V B - приращения вектора кажущегося поворота и вектора кажущейся скорости, вычисленные согласно математической модели ИБ; V©, VB - скорректированные приращения вектора, кажущегося поворота, и вектора, кажущейся скорости по результатам идентификации дрейфа гироскопов и смещения нуля акселерометров; Хк - прогнозируемое по инерциальным данным значение вектора, состояния, включающего радиус-вектор положения, вектор скорости и кватернион инерциальной ориентации, в канале БИНС корректируемый; Хк — скорректированное с учетом внешних измерений значение вектора состояния; стах ~ вектор среднеквадратического отклонения (СКО) ошибок основных навигационных параметров, формируемый в ковариационном блоке ФК и используемый для обеспечения функции целостности системы (диагностика параметрических отказов); бш, бб - оценки параметров модели ошибок измерений гироскопов и акселерометров, получаемые в ФК; бш -сглаженная оценка дрейфа гироскопов; Н1 - баровысота, поступающая от СВС и используемая для коррекции вертикальных каналов алгоритмов БИНС; 6Н - параметр смещения баровысоты относительно геодезической высоты; Н - геодезическая высота, вычисляемая в алгоритмах «БИНС квазиавтономный» и «БИНС автономный»; H - геодезическая высота, скорректированная с учетом измерений СВС; Хка ~ вектор состояния алгоритма «БИНС квазиавтономный»; 6Х - вектор отклонения параметров «БИНС квазиавтономный» от одноименных параметров «БИНС корректируемый»; 6Х - сглаженный с помощью фильтра 1-го порядка вектор 6Х (служит для коррекции параметров «БИНС квазиавтономный»); VN, Vh, VE - северная, вертикальная и восточная составляющие скорости самолета, у, А - широта и долгота, ф - угол истинного курса, выдаваемый алгоритмом «БИНС квазиавтономный» во внешние системы; Ө,^ - углы тангажа и крена, Һ - высота инерциальная, поступающая из алгоритма «БИНС автономный» во внешние системы; Грне, Йене ~ вектор скорости и радиус-вектор положения самолета в системе координат WGS-84, поступающий из АПСН при наличии достаточного числа радиовидимых спутников; р, dp - векторы радиальной дальности и радиальной скорости для 2-3 радиовидимых спутников ГЛОНАСС, вычисляемые по сырым измерениям АПСН и предназначенные для коррекции вектора состояния «БИНС корректируемый» в субинтегрированном режиме;Xg,¥g,Zg,Xg,Yg,Zg -координаты и скорость радиовидимых спутников ГЛОНАСС в системе координат ПЗ-90, вычисляемые с учетом эфемерид и используемые в субинтегрированном режиме.
Опишем работу схемы с точки зрения информационных потоков и назначения блоков в ней.
Инерциальные измерения в виде VO, VB поступают параллельно в три блока: «БИНС корректируемый», «БИНС квазиавтономный», «БИНС автономный», в которых по алгоритму инерциальной навигации вычисляются координаты, скорость и ориентация самолета. Назначение блока «БИНС корректируемый» - прогноз вектора состояния на интервалах между коррекциями, используемый в ФК. Данные блока корректируются 1 раз в секунду апостериорной оценкой вектора состояния, полученной с использованием спутниковых измерений и баровысоты. Блок «БИНС квазиавтономный» предназначен для формирования выходных параметров системы: скорости, истинного угла курса и планарных координат. Вектор состояния блока корректируется через фильтр низкой частоты данными из блока «БИНС корректируемый» и сглаженной оценкой баровысоты. Использование фильтра низкой частоты позволяет сгладить скачки в оценке вектора состояния, возможные после длительного перерыва спутниковой информации. При отсутствии спутниковой информации корректирующая связь разрывается и восстанавливается после окончания переходных процессов в фильтре, связанных с возобновлением коррекции по спутниковым данным. Блок «БИНС автономный» предназначен для формирования выходных параметров системы: углов тангажа и крена и инерциальной высоты.
Спутниковая информация в виде готового решения или «сырых» данных для 2-3 спутников ГЛОНАСС после предварительной подготовки поступает в ФК в качестве измерений. В блоке ФК, куда также поступают измерения баровысоты, осуществляется контроль непротиворечивости полученных измерений и отбраковка недостоверных. После чего в зависимости от установленного актуального набора измерений вычисляется скорректированный расширенный вектор состояния. Скорректированный вектор навигационных параметров обновляет вектор состояния блока «БИНС корректируемый», а оценки погрешности измерений инерциальных датчиков после контроля достоверности через фильтр низкой частоты поступают в блок коррекции измерений ИБ.
Помимо описанных структурных решений, для устранения негативных эффектов от неравномерного поступления корректирующих измерений в фильтре Калмана реализуются различные алгоритмы адаптации используемых в нем параметров моделей шумов. В качестве критерия эффективности адаптации, использованного при разработке, принимается соответствие фактических ошибок оценивания их оценочным дисперсиям из ковариационного блока фильтра при неравномерном поступлении корректирующих измерений переменного состава. Для достижения ожидаемых результатов коррекции в специфических условиях работы ИИСНС предусмотрено также автоматическое управление величиной корректирующего воздействия на различные компоненты вектора состояния, достигаемого путем временного изменения соответствующих элементов ковариационной матрицы ошибок.
Все указанные способы и приемы организации процессов обработки инерциальной информации, фильтрации и коррекции надежно устраняют негативные эффекты, связанные со специфическими условиями функционирования ИИСНС.
V. Результаты испытаний НСИ-2000МТС
В настоящее время система, прошла, комплекс стендовых, мобильных, наземных испытаний (на. борту самолета. Ту-204СМ), а. также летную апробацию ПМО (в составе НСИ-2000МТ) на. борту Ил-96-300, Су-30 (в качестве «пассажира»), Ту-334-100 (20 полетов в составе пилотажно-навигационного комплекса), Ту-214. Результаты работы системы анализировались по телеметрической информации, формируемой самой системой, по данным бортовой КЗА «Пирит» и в некоторых полетах по данным КБТИ.
В процессе стендовых и мобильных (на. автомобиле) испытаний проверены информационные режимы работы системы. Точностные характеристики системы в ходе четырех мобильных испытаний приведены в табл. 2.
Т а б л и ц а 2
Результаты мобильных испытаний
|
№ пп |
Наименование режима |
Продолжительность режима |
Максимальная погрешность по широте / долготе, м |
Максимальная погрешность путевой скорости, км/ч |
|
1 |
интегрированный |
40 мин |
34/8 |
1,1 |
|
субинтегрированный |
2ч 40 мин |
401/105 |
5,0 |
|
|
автономный |
_ |
_ |
_ |
|
|
2 |
интегрированный |
15 мин |
7/7 |
1,2 |
|
субинтегрированный |
1ч 15 мин |
60/166 |
2,5 |
|
|
автономный |
_ |
_ |
_ |
|
|
3 |
интегрированный |
15 мин |
53/12 |
3,2 |
|
субинтегрированный |
50 мин |
27/60 |
2,2 |
|
|
автономный |
_ |
_ |
_ |
|
|
4 |
интегрированный |
1ч 50 мин |
16/8 |
1,8 |
|
субинтегрированный |
_ |
_ |
_ |
|
|
автономный |
1ч |
220/2420 |
15,8 |
Во время летной апробации ПМО-системы отрабатывалось взаимодействие с внешними системами в штатных условиях. Точностные характеристики интегрированного режима приведены на. рис. 4.
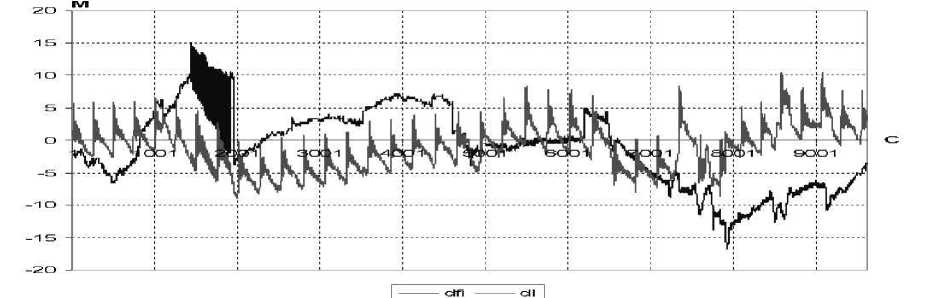
Рис. 4. Погрешность определения координат в интегрированном режиме на. Ту-334-100
Для демонстрации возможности субинтегрированного режима, на. рис. 5, 6 приведены результаты полунатурного моделирования работы ПМО-системы на. реальных телеметрических данных полета. И.л-96-300 по маршруту Анадырь-Москва. После 3,5 часов интегрированного режима, система, переведена, в субинтегрированный режим продолжительностью 5,5 часов.
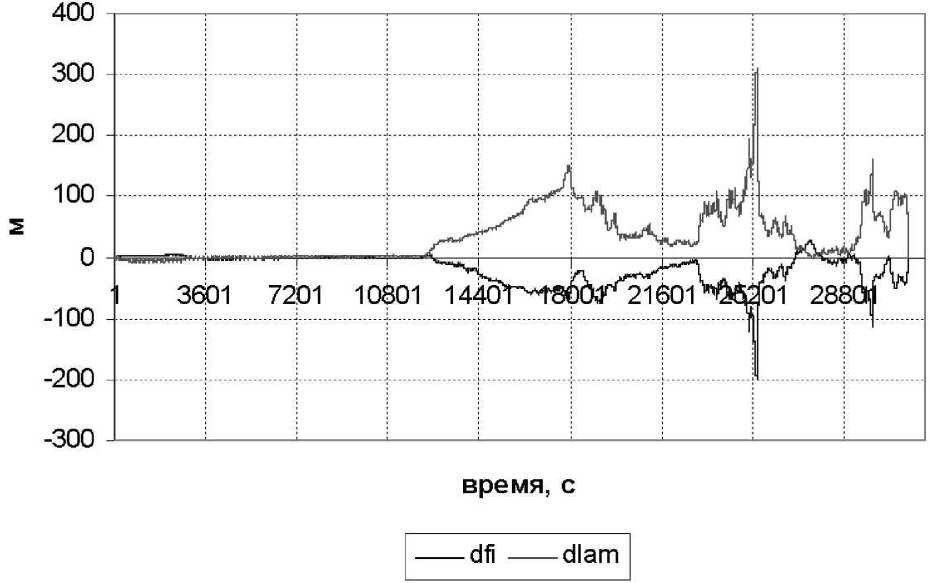
Рис. 5. Погрешность определения координат в субинтегрированном режиме
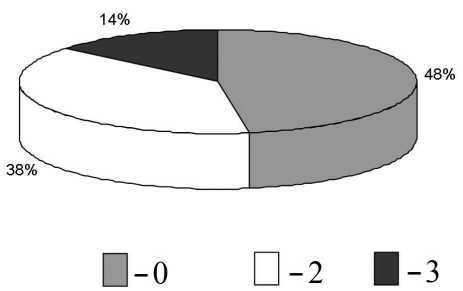
Рис. 6. Частота коррекций в субинтегрированном режиме от 0, 2 и 3 спутников ГЛОНАСС
Летные испытания субинтегрированного режима проводились на самолете Ту-214 в составе комплекса. Погрешность определения широты и долготы в субинтегрированом режиме, продолжительность которого до посадки самолета составила 3 ч 20 мин, приведена на рис. 7.
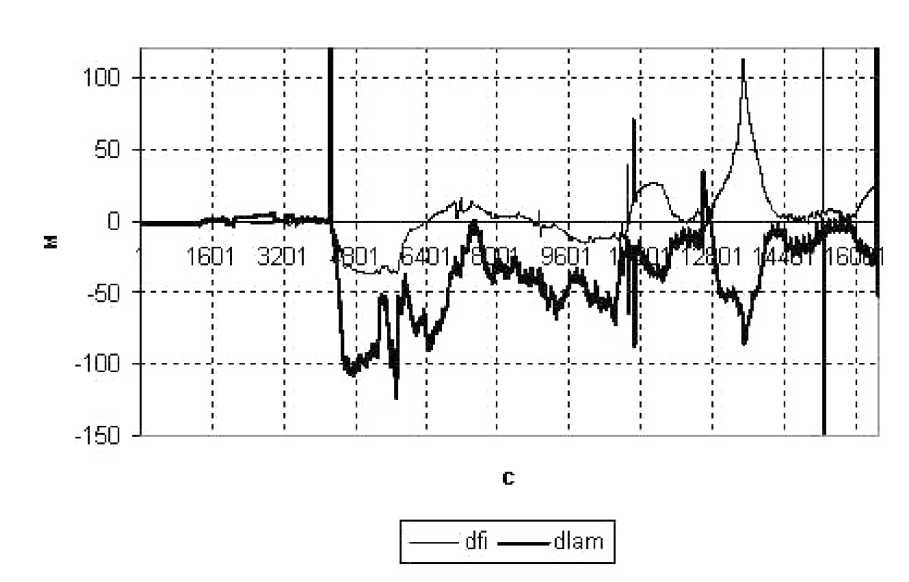
Рис. 7. Погрешность определения координат в субинтегрированном режиме на Ту-214
VI. Заключение
Одним из направлений совершенствования интегрированных инерциально-спутниковых систем является повышение доступности спутниковой информации для ее использования в ИИСНС. В этом случае интегрированные системы, сохраняя свою стоимостную привлекательность для широкого круга, потребителей, могут стать надежным, высокоточным средством навигации. Опыт разработки лазерной интегрированной инерциально-спутниковой системы HCII-2000MTG и результаты испытаний демонстрируют целесообразность и эффективность введенного субинтегрированного режима, способного при малом числе видимых спутников обеспечить долговременную точность, сопоставимую с точностью спутниковой навигации. Алгоритмические решения, заложенные в ПМО-системы, позволяют преодолеть известную ограниченность и недостатки, присущие интегрированным системам с инерциальными датчиками среднего класса, точности.
Список литературы Лазерная интегрированная инерциально-спутниковая навигационная система с расширенной доступностью спутниковых измерений
- Руководство по требуемым навигационным характеристикам. Doc 9613, изд.3, Монреаль, ИКАО, 2008
- Веремеенко К.К., Антонов Д.А., Жарков В.М., Зимин Р.Ю. Малогабаритная интегрированная навигационная система//Материалы XVII Санкт-Петербургской международной конференции по интегрированным навигационным системам. -2010. -С. 188-190
- http://www.teknol.ru/products/aviation/companav2/
- Assured-Integrity Monitored-Extrapolation Navigation Apparatus/John W. Diesel. US Patent 5,583,774. 1996
- http://www.glonass-center.ru/
- Квалификационные требования (КТ-34-01 «Бортовое оборудование спутниковой навигации») (3 редакция). -2005. -30 с
- Фомичев А.А., Колчев А.Б., Ларионов П.В., Пугачев Р.В., Успенский В.Б. Комплексирование информации в интегрированной навигационной системе при неполном рабочем созвездии спутников//Гироскопия и навигация. -2007. -№ 1. -С. 3-15
- Патент РФ №2334199 «Инерциально-спутниковая навигационная система с комбинированным использованием спутниковых данных», приоритет 19.03.2007
- Фомичев А.А., Успенский В.Б., Счастливец К.Ю., Брославец Ю.Ю., Колчев А.Б. Комплексирование информации в интегрированной навигационной системе с лазерными гироскопами на основе обобщенного фильтра Калмана//Материалы X Международной конференции по интегрированным системам. Санкт-Петербург, 2003
- Фомичев А.А., Колчев А.Б., Ларионов П.В., Успенский В.Б. Сплайновая модель температурной зависимости дрейфа лазерного гироскопа//Материалы XV Международной конференции по интегрированным системам. Санкт-Петербург, 2008
- Патент РФ №2277696 «Интегрированная инерциально-спутниковая навигационная система», приоритет 21.04.2004
