Лазерная триангуляционная система для измерения деформаций

Автор: Гаршинов В.Н., Мордасов В.И.
Журнал: Компьютерная оптика @computer-optics
Рубрика: Компьютерная оптика: Дифракционные оптические элементы, технология и приложение
Статья в выпуске: 14-15-2, 1995 года.
Бесплатный доступ
Короткий адрес: https://sciup.org/14058308
IDR: 14058308
Текст статьи Лазерная триангуляционная система для измерения деформаций
ЛАЗЕРНАЯ ТРИАНГУЛЯЦИОННАЯ СИСТЕМА ДЛЯ ИЗМЕРЕНИЯ ДЕФОРМАЦИЙ
Оценка деформаций изделий под влиянием эксплуатационных нагрузок является одной из актуальных технических проблем, решение которой счопутствует всем стадиям жизненного цикла изделия от проекта до серийного образца и изменения его характеристик в процессе функционирования. Если на стадии проектирования превалируют расчетные и модельные оценки, то создание опытного образца сопровождается, как минимум, разработкой методик его испытаний, в том числе и по определению деформаций.
Деформации издений и вызываемая или разъюстировка приборов штатно контролируется тангуляционными методами с помощью авто коллимационных теодолитов [1]. Используемые при этом авто коллимационные теодолиты типа ТБ2А, ТБЗ, Т5В не могут обеспечить среднеквадратичную ошибку измерения углов из одного приема менее 2 угл.с., что не всегда является допустимым значением. Хотя визуальные автоколлиматоры и теодолиты достигают разрешения 0,2...0,5 угл.с., но лишь по маркам специального вида, например, бисекторным [2]. Столь высокая чувствительность глаза к сравнению углов прихода двух волновых фронтов при поперечной наводке (-10 угл.с.) от специальных марок объясняется геометрической структурой расположения светочувствительных элементов сетчатки, в то время как разрешающая его способность к двум точечным источникам в 5...6 раз хуже [3].
Переход от визуальных к объективным методам регистрации и вычислений количественных характеристик изображения вносит ряд позитивных моментов в штатную процедуру измерений:
-
- полное исключение субъективных ошибок наведения, вызванных утомлением оператора при длительных испытаниях;
-
- свести время получения первичной информации о распределении освещенности в изображении ко времени одного кадра (40 мс в телевизионном стандарте, что по крайней мере на 2 порядка быстрее, чем при визуальных наблюдениях);
-
- возможность использования пучков с произвольным распределением плотности мощности излучения по поперечному сечению, а не по специфическим маркам, применение которых не всегда допустимо;
-
- для малых отклонений пучков, не выходящих из поля зрения прибора, отсутствует механическое перемещение оптической оси фотоприемной части, в то время как совмещение автоколлимационных меток, либо перекрестия трубы теодолита с бисекторной маркой достигается, как правило, с помощью механических подвижек.
Последнее обстоятельство особенно выгодно, когда требуются дистанционные измерения, например, в условиях вакуума, инертного газа или иных технологических сред.
В качестве количественных характеристик изображения, с помощью которых оценивается пространственное положение пучков и их смещения, удобно выбрать координаты энергетического центра освещенности. Точность наведения на энергетический центр современных фотоэлектрических микроскопов составляет 0,01 мкм [4]. Однако уже релевское разрешение координат энергетического центра (2/2 » 0,5 мкм в видимом диапазоне) с объективом, имеющим фокусное расстояние 2^1 м обеспечивает угловое разрешение Х^Г =0,1 угл.с., то есть по крайней мере в 2 раза выше, чем в лучших визуальных измерениях.
При объективной регистрации световых полей с целью измерений геометрических характеристик предпочтение отдается матричным твердотельным фотоприемникам, жесткий и стабильный растр которых выгодно отличает их от электронно-лучевых приборов с электрической либо магнитной разверткой электронного пучка [5]. Серийные ПЗС-матрицы, работающиее в телевизионном стандарте, например, К1200ЦМ7 в телекамере КТМ-1, имеют размер одного фоточувствительно го элемента 24x21 мкм [6]. В случае измерения положения фокального пятна с точностью до размера одного фоточувствительного элемента, т.е. 24 мкм, с объективом МТО-ПСА (фокусное расстояние 1 м), угловое разоешение составит 24 мкм/1 м ~ 5 угл.с., что сравнимо с погрешностью визуальных измерений. Однако существуют теоретические предпосылки пространственного разрешения менее размера элементарной фоточувствительной площадки матричного фотоприемника путем расчета координат энергетического центра освещенности изображения пятна.
Координаты энергетического центра рассчитываются с помощью выражений [7]:
Г - V ^О V - М т01
где Nx и Ny - максимальное число отсчетов вдоль соответствующих осей координат; т00, тю> ^oi " двумерные моменты распределенияя плотности мощности лазерного излучения в изображении.
Под двумерным моментом подразумевается величина вида:
xpy9I(x,y)dxdy,
где Дх,у) - распределение интенсивности излучения в поперечном сечении пучка; 5 -площадь облости, в которой значения I(x,y)^R (R - порог чувствительности средств измерения); Тх, Ту - максимальные размеры области 5 вдоль соответствующих осей координат.
Оценка значения величины т^ с помощью матричного фотоприемника определяется соотношением:
где Nx, Ny - максимальное число отсчетов вдоль соответствующих осей координат; к, I - номер отсчета в соответствующем направлении; I (к,1) - значение интенсивности света на элементе с номером (к,Ь-
У матриц с квадратным растром Nx=Ny=N , а число элементов ЛЫ56. Физический смысл момента нулевого порядка mgo - средняя освещенность матричного фотоприемника, т.е.
где Wo - величина, пропорциональная полному световому потоку, падающему на фотоприемник.
Если сделать естественное предположение, что энергетический центр расположен вблизи центра растра, т.е. с номерами отсчетов k=l=N/2, то
Среднее квадратичное отклонение измеренных координат энергетического центра от его истинного положения для координаты х определяется выражением [7] (для координаты у аналогично):
где

Q2 =
D10
o^ + lXlAT. + l) Ц Г (Л^+^2Л^+^ aNX +oNXV ,+ 2N.
_2 a2 фХ^А ^ NxNy+ oNxNy
. , ^(^+1)
^[^ю^оо] - 2N2N * ^
В выражениях (7)...(9):
5*10 - среднее квадратичное отклонение в измерении момента т^д; 5qq - то же для момента mgo; ст - средняя квадратичная погрешность измерения интенсивности в точке, т.е. погрешность измерения интенсивности одним элементом матричного фотопреобразователя; 7r - порог чувствительностии матричного фотопреобразователя.
Упростим выражения (7)...(9) путем подстановок
Nx+i«N; 2^+1 « 2N, - (10)
так как 7^256^1. Кроме того предположим, что интенсивность нормирована на 1. т.е.
L№L (И)
а число уровней квантования сигнала с одного элемента ПЗС-матрицы равнво М. Тогда можно принять
° Ir м "
В упрощенной форме выражения (7)...(9) принимают вид:
с-2Ч 1 1 ~ 1
хо~ М2кЗКт INTlNW
MTN2 ’
Подставляя (13)...(15) в (6), получим:
2 1 М2
s,° зл/чии ' (16)
Частное W^N2- представляет собой среднюю освещенность одного фоточувствительного элемента. Учитывая условие нормировки (И) считаем, что средняя освещенность одного фоточувствительного элемента составляет 50% от максимальной, т.е. /О/7^=О,5, что не нарушает общности рассуждений. В итоге имеем
5__L_
*°" (Vw) '
Таким образом, повышая разрешение по интенсивности каждого фоточувствительного элемента, получаем выигрыш в погрешности измерения координат энергетического центра. Если при бинарной обработке М=1 и \д« 1, то восприятие 4, 8 или 16 градаций интенсивности улучшает разрешение до долей размеров ячейки ПЗС-матрипы.
Существует и схемотехнический путь повышенияя пространственного разрешения ПЗС-матрицы с многофазной структурой каждого элемента. Он заключается в накоплении фотогенерированных зарядов под произвольно выбранным электродом этой многофазной структуры. В этом случае разрешение увеличивается пропорционально удвоенному значению числа фаз [8].
Поскольку объективная регистрация не накладывает жестких ограничений на функцию относительного распределения плотности мощности в поперечном сечении пучка, целесообразно использовать в качестве источников излучения лазеры видимого диапазона. Здесь, при размерах контролируемых изделий ~10 м и комплексных воздействий на него в производственных условиях, в первую очередь проявляются такие свойства лазерного излучения, как малая расходимость и монохроматичность, что обуславливает малые потери лучистой энергии на протяженных трассах и эффективностьь спектральной селекции от фоновых засветок.
Для измерительных целей наилучшими технике-экономическими показателями обладают гелий-неоновые лазеры. Однако у серийных экземпляров девиация пространственного положения оси диафрагмы направленности (ОДН) достигает 10 угл.с. и более за 8 часов работы. Пассивная стабилизация положения ОДН конструктивными (инвар, теплоизоляция и крепление газоразрядной трубки [9]), либо схемными (передача излучения лазера через световолокно, излучающий торец которого расположен в фокусе объектива [10]) решениями не позволяет добиться стабильности ОДН лучше 1 угл.с. Активные системы стабилизации позволяют снизить флуктуации ОДН до 0,3 угл.с. [11], но в настоящее время отечественной промышленностью серийно не производятся, и излучатели ими не комплектуются. Таким образом, чтобы нейтрализовать флуктуации ОДН необходимо использовать двух или многолучевые схемы измерения, в которых один из пучков выполянял бы функции опорного пучка.
Двухлучевые разностные схемы измерения имеют еще одно преимущество при транспортировке пучков от измерителя до изделия и обратно, а именно взаимодействуя с одними и теми же участками прозрачных сред и отражающих границ, пучки испытывают сходные возмущения. В результате появляется возможность скомпенсировать влияние иллюминаторов, поворотных зеркал, неоднородностей среды распространения, нестабильность характеристик приемной аппаратуры на погрешности измерения взаимных смещений лазерных пучков и реализовать принципиально достижимое разрешение.
Проектирование двухпучковых разностных схем предусматривает применение оптических элементов и выбор траекторий лазерных пучков, нечувствительных к малым флуктуациям ОДН, т.е. сохраняющих взаимную ориентацию пучков при их распространении до объекта измерений и далее до фотоприемных устройств. Проверку на неразъюстируемость оптической схемы по отношению к малым флуктуациям ОДН можно провести последовательно для каждого из оптических элементов с помощью выражений, приведенных в руководстве [12].
Рассмотрим пример со светоделителем, собранным из двух зеркал 1 и 2, первое из которых полупрозрачное (см.рис.1).
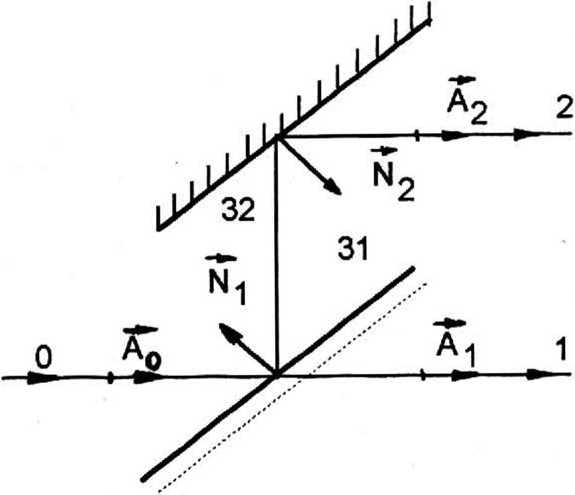
Рис Л. Схема светоделителя:
31 - полупрозрачное зеркало; 32 - глухое зеркало; 0, 1, 2 - лазерные пучки
Пренебрегаем преломлением пучка 0 в полупрозрачном зеркале 1, тогда пучок 1 распространяется параллельным пучку 0. Ориентацию пучков 0, 1 и 2 и, нормалей _к зеркалам 1 и 2 зададим соответствующими единичными векторами-ортами Jq, Л}, Л2, Ny и N^. Так как |Ло|=|Л]]=|Л2|=1> то угол между лучами 1 и 2 <р можно найти по значению его косинуса:
cos??
(Л^МЛА)
Орт второго пучка, который образуется в результате двух отражений пучка 0, выражается через орт начального пучка следующим образом
- - (- А 7 Г-1
Л^ = Л^со52с7+2р^Л^1$ш ст-1 J0pjsin2cr , (19)
где р - орт направления ребра, образованного пересечением плоскостей зеркал 1 и 2; о -угол между зеркалами.
г Если зеркала светоделителя выставлены идеально, т.е. о=180°, то сразу видно, что ^2=^1 и пучки 1 и 2 распространяются по параллельным траекториям независимо от флуктуаций ОДН.
Когда о*лл (л=0,±1,±2,...), представим:
sin (7
C0S(7= - (aw)
Воспользовавшись выражениями (18) и (19), находим угол между пучками 1 и 2:
/ - - А / _ А/ _ А 7
cos?? = I Л^Л01соз<7+21 Л^ II Л ^jsin
(Г- 1- Г - V 2
<т-11 А^р 1Лф Isin2(7=cos2cr+2I М^\ sin
- Л I- I2
так как I ^Ло I = Ш = 1 Поскольку р и Яд
• ([vk)=°-
- орты, то, обозначив угол между ними ц/ , будем иметь
I рА^ J = cos у< .
Флуктуации ОДН и есть флуктуации угла у . Тогда, представив у в виде суммы
y=ipQ+bV ,
где \р0 - среднее значение угла между р и ^; Д\р- амплитуда флуктуаций.
Воспользовавшись выражением для косинуса суммы двух углов, получаем:
I2 1
| = cos2 \р0 cos2 Ахр——sin2 ф0 sin 2 Д\р+ sin2 ц^ sin2 Д\|/ . (24)
Так как флуктуации ОДН гелий-неоновых лазеров не превышают 1 угл.мин., то можно принять cos Ду «1, sin2A\p « 2 Ду и зт2Ду«0. Тогда выражение для cosy приобретает относительно простой вид:
cosy = cos2c+2cos2 у0 sin2 ст-2 sin 2у0 5Ш2стД\р .
Проанализируем выражение (25). Видно, что флуктуации ОДН (угол Ду) в первые два слагаемых не входит. Третье же слагаемое при установке светоделительных зеркал в параллельное состо^уие с погрешностью не хуже 1 угл.мин., то есть когда угол между векторами 180о-Г<7^^2<180о+Г , имеет порядок (1 угл.мин.а0,0003 рад)3=3*10-11. Таким образом угол между пучками 1 и 2 флуктуирует с амплитудой не более 3*10"п рад.
Аналогично приводилось рассмотрение всех элементов оптической схемы лазерной триангуляционной системы на ее нечувствительность к флуктуациям ОДН излучателя.
Возможны как параллельная, так и последовательная процедуры формирования опорного и измерительного пучков на фоточувствительном слое ПЗС-матрицы. Преимущества последовательной схемы: большой динамический диапазон по пространству, включающий все поле зрения и простое программное обеспечение, так как обрабатывается кадр, на котором запечатлен лишь один пучок. Основной недостаток последовательной процедуры - ограничение быстродействия длительностью двух последовательных кадров. В параллельной схеме, наоборот, возникают сложности в пространственном разделении пучков, хотя время съема информации ограничено длительностью лишь одного кадра.
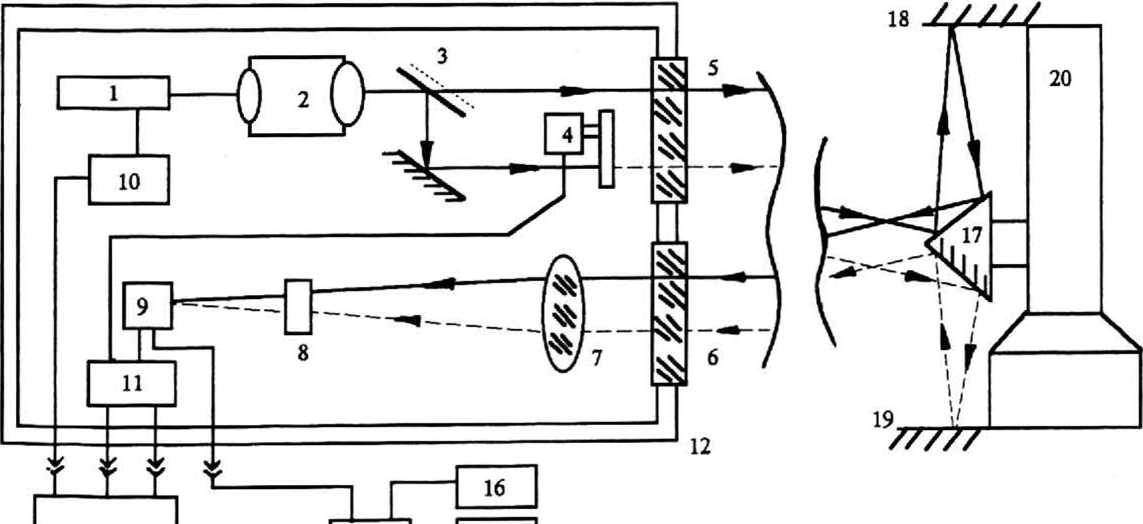
Упрощенная схема лазерной триангуляционной системы для измерения деформаций приведена на рис.2. Источником света служит гелий-неоновый лазер Л ГН-224 1. Лазерный пучок расширяется двухлинзовым коллиматором 2 до диаметра 1 см и попадает на двухзеркальный расщепитель пучка 3. С помощью электромеханической заслонки 4 пучки можно поочередно перекрывать. Через иллюминатор 5 пучки попадают на угловое зеркало 17, закрепленное на испытуемом изделии 20. Отразившись от углового зеркала лазерные пучки попадают на зеркала 18 и 19, жестко закрепленные на соответствующих сечениях испытуемого изделия.
13 14 ---- 15
Рис.2. Оптическая схема лазерной триангуляционной системы измерения деформаций:
1 - лазер ЛГН-224; 2 - коллиматор; 3 - светоделитель; 4 - электромеханическая заслонка; 5,6 - иллюминатор; 7 - объектив МТ0-11СА; 8 - интерференционный светофильтр; 9 -ПЗС-телекамера КТМ-1; 10 - источник питания лазера; И - электронный блок; 12 -контейнер; 13 - пульт управления; 14 - блок ввода-вывода изображений; 15 - мини ЭВМ; 16 - видеомонитор; 17 - угловое зеркало; 18,19 - зеркала; 20 - испытуемое изделие
В процессе испытаний в результате деформаций изделия угол между зеркалами 18 и 19 меняется. Это вызовет изменения траекторий отраженных ими пучков, которые через иллюминатор 6, объектив 7 и интерференционный светофильтр 8 попадают на фоточувствительный слой ПЗС-матрицы телекамеры КТМ-1 9. ПЗС-матрица располагается в фокальной плоскости объектива, вследствие чего угловые смещения пучков преобразуются в линейные перемещения фокальных пятен по ПЗС-матрице:
А/ = УДф, (26)
где Д/ - линейные смещения фокального пятна; F - фокусное расстояние объектива; Др - угловое смещение пучка.
Часть испытаний изделий аэрокосмического назначения проводят в термобарокамерах в условиях пониженных давлений (10*5...800 мм рт.ст.) и тепловых нагрузок излучением с плотностью потока мощности лучистой энергии на уровне солнечной постоянной. Являясь уникальными сооружениями, термобарокамеры мало приспособлены для оптических систем контроля, расположенных вне камеры, что заставляет устанавливать оптические датчики внутри нее. При этом оптические элементы должны быть адаптированы к основным воздействующим факторам, либо защищены от них. Вариант защиты прибора путем помещения его в герметичный контейнер представляется предпочтительным, поскольку позволяет использовать серийную элементную базу и проводить настройку прибора в лабораторных условиях.
Приемо-передающий блок лазерной триангуляционной системы помещен в герметичный контейнер 12. В нем же размещены источник питания лазера 10 и электронный блок 11. Электронный блок содержит источники питания телекамеры и оптоэлектронных датчиков положения электромеханической заслонки, а также преобразователи уровня сигналов оптоэлектронных датчиков. Электропитание лазера, телекамеры и заслонки, а также обмен информации с приемо-передающим блоком осуществляется по кабелю. Поверхность стенок контейнера термостабилизируется с помощью приваренных к ним дюралевых труб, по которым прокачивается вода. Давление внутри контейнера поддерживается за счет герметичности.
Наружная часть системы состоит из пульта управления 13, блока ввода-вывода изображений 14, мини-ЭВМ 15 и видеомонитора 16. С пульта управления включается лазер, телекамера и электродвигатель заслонки. В ручном режиме заслонка может быть остановлена в любом положении по команде оператора. В автоматическом режиме останов заслонки происходит по сигналу оптоэлектронного датчика, когда перекрыт один из пучков. Блок ввода-вывода изображений оцифровывает телевизионный сигнал быстродействующим АЦП, запоминает один кадр изображения и обменивается информацией с ЭПМ и видеомонитором. Мини-ЭВМ управляет работой блока ввода-вывода, рассчитывает и запоминает координаты энергетического центра. Видеомонитор визуализирует поле зрения прибора.
Габариты контейнерного приемо-передающего блока - 0850x450 мм, рабочая длина волны 0,63 мкм, угловое разрешение с объективом, имеющим фокусное расстояние 1 м, 0,5 угл.с., пределы измерения угловых смещений ±5 угл.мин.
