Линейно-квадратические дискретно-непрерывные системы с управляемыми коэффициентами

Автор: Расина Ирина Викторовна, Батурина Ольга Владимировна
Журнал: Программные системы: теория и приложения @programmnye-sistemy
Рубрика: Методы оптимизации и теория управления
Статья в выпуске: 1 (24) т.6, 2015 года.
Бесплатный доступ
Рассматривается частный случай дискретно-непрерывных систем (ДНС): линейно-квадратические по состоянию ДНС с управляемыми коэффициентами. Для указанного класса систем строится аналог метода глобального улучшения Кротова, последняя итерация которого дает решение в форме приближенно-оптимального синтеза управления. Полученный результат можно трактовать как развитие теории аналитического конструирования оптимальных регуляторов (АКОР) применительно к ДНС. Приводится иллюстративный пример.
Дискретно-непрерывные системы, магистральные решения., метод глобального улучшения, оптимальный синтез управления
Короткий адрес: https://sciup.org/14336139
IDR: 14336139 | УДК: 517.977
Psta.psiras.ru/
A special case of discrete-continuous systems (BPS) is considered: linear-quadratic in the state of BPS with controllable coefficients. For this class of systems, an analogue of the Krotov global improvement method is constructed, the last iteration of which gives a solution in the form of an approximately optimal control synthesis. The obtained result can be interpreted as the development of the theory of analytical design of optimal regulators (ACOR) with reference to CSN. An illustrative example is given.
Текст научной статьи Линейно-квадратические дискретно-непрерывные системы с управляемыми коэффициентами
Наряду с традиционными исследованиями в теории оптимального управления наблюдается постоянный интерес к моделям управления системами неоднородной структуры, систематические исследования которых начаты еще в 1960-е–1970-е гг. В различных публикациях эти системы фигурируют под разными названиями: системы переменной структуры [1] , дискретно-непрерывные системы [2] , логико-динамические системы [3, 4] , импульсные системы [5] , гибридные системы [6 , 7] . Однако для подобных систем классические методы оптимального управления непосредственно неприменимы. Один из возможных подходов к исследованию задач оптимального управления для систем неоднородной структуры состоит в обобщении для
Работа выполнена при финансовой поддержке Российского фонда фундаментальных исследований: проекты 14-31-50894 мол_нр «Разработка и исследование алгоритмов оптимизации линейных динамических систем с управляемыми коэффициентами», 15-01-01923 А «Конструктивные методы оптимизации управления системами неоднородной структуры».
○c Программные системы: теория и приложения, 2015
них достаточных условий оптимальности Кротова [8] . В [9] сформулированы общие условия оптимальности для абстрактной динамической системы как многошаговой, операторы которой на разных шагах допускают различную интерпретацию. В [2 , 10 –12] предложена и развита математическая модель дискретно-непрерывной системы (ДНС) в виде конкретизации указанной абстрактной модели [9] , применимая для широкого класса задач управления неоднородными процессами, и для нее получен аналог достаточных условий Кротова для непрерывных и дискретных систем. Как и в случае однородных систем, получение закона управления в форме синтеза для ДНС при численной реализации вызывает серьезные трудности, связанные с «проклятием размерности». Для преодоления этих сложностей в теории управления принято разделять задачу управления на два больших этапа:
-
(1) поиск оптимальной (либо вообще некоторой желаемой) временной программы управления,
-
(2) построение приближенно оптимального синтеза управления с обратной связью в окрестности этой программы с целью ее реализации на основе упрощенной модели объекта, допускающей аналитическое или близкое к нему достаточно простое решение.
Соответствующее направление, связанное с решением задачи (2), получило интенсивное развитие как теория аналитического конструирования оптимальных регуляторов (АКОР) в работах А.М. Летова [13, 14] , Р. Калмана [15] и в ряде других публикаций, где исходная модель заменяется неким линейно-квадратическим приближением.
В данной работе рассматривается модель линейно-квадратической ДНС как частный случай общей модели [12], и для нее строится аналог метода глобального улучшения управления [12] , позволяющий получить решение в форме приближенно-оптимального синтеза. В отличие от работ [13, 14] предлагается линейно-квадратическое приближение функций Кротова–Беллмана и обобщенного лагранжиана Кротова в окрестности реализуемой программной траектории, как для итерационного поиска оптимальной программы, так и для приближенно-оптимального синтеза в ее окрестности, который автоматически находится по окончании итерационного процесса. Полученный результат можно рассматривать как развитие теории АКОР для ДНС в рамках иного подхода к задачам АКОР, предложенного в [16]. В заключение приведены результаты вычислительных экспе- риментов на методическом примере.
-
1. Линейно-квадратические дискретно-непрерывные процессы и основные конструкции
Рассматриваемая модель ДНС представляет собой двухуровневую управляемую систему. На верхнем уровне фигурирует дискретная модель
-
(1) x°(k + 1) = x°(k) +— a(k,u)lxl2 + b(k, u), x° E R,
-
(2) x(k + 1) = A(k,u)x(k) + B(k,u), x E R m ( k ),
k E K = {kI,kI + 1, ..., kF}, и E U(k, x) C Rr(fc), где k — номер шага (этапа), не обязательно физическое время, U(k,x) — заданное при каждом k и x множество, a(k,u), b(k,u) — заданные функции, A(k,u), B(k,u) — матрицы размеров m(k) х m(k), m(k) х 1 соответственно.
На некотором подмножестве K ‘ C K , k F E K ’ действует непрерывная система нижнего уровня
-
(3) x c0 = -ac(t, u c )|x c | 2 + b c (t, u c ), x c0 E R,
-
(4) x c = A c (t,u c )x c + B c (t,uc), x c E R n ( k ) ,
t E T (z) = [ti(z),tF(z)], xc E Xc(z,t) C Rn(fc), uc E Uc (z,t,xc) C Rp(fc), z = (k, x) , ac(t, uc), bc(t, uc) — заданные функции, Ac(t, uc), Bc(t, uc) — матрицы размеров n(k) х n(k), n(k) х 1.
Оператор правой части (1) имеет вид
x(k +1) = y(k)xc(k,tF), k E K‘, xc(tI) = ^(k)x, где через ^, 9 обозначены матрицы соответствующих размеров. Здесь z = (k, x) — совокупность переменных верхнего уровня, играющая на нижнем уровне роль параметров.
Решением этой двухуровневой системы считается набор m = (x(k),u(k)), где при k Е K‘: u(k) = mc(k), mc(k) Е Dc(z(k)), (называемый линейно-квадратическим дискретно-непрерывным процессом), где mc(k) — непрерывный процесс (xc(k,t), uc(k,t)), t Е T(z(k)), а Dc(z) — множество допустимых процессов mc удовлетворяющих указанной дифференциальной системе (3)–(4) при кусочно-непрерывных ис(к,к) и кусочно-гладких хс(к,к) (на каждом дискретном шаге к).
Будем рассматривать для модели (1) – (4) задачу оптимального управления как задачу о минимуме функционала I = х 0 (к р ) на множестве D решений т при фиксированных к / = 0, к р , х (к / ) и дополнительных ограничениях х(к) е Х (к).
В общем случае достаточные условия оптимальности для такой задачи получены в [12]. Функции Кротова р, рс зададим в виде р = фт (к)х + -хтсг(к)х — х0, рс = фст(к, t)хc + -хсТсгс(к, t)хc — хс0, где ф(к), фc(k,t) — вектор-функции, а ст(к), стc(k,t) — матрицы соответствующих размеров. При этом основные конструкции общих достаточных условий для рассматриваемой задачи имеют вид:
G = ф т (к р )х + - х т а(к р )х,
R = ф т (к + 1)(А(к, и)х(к) + В(к, и)) — х 0 (к) —
-
— -а(к, и) |х| 2 — Ь(к, и)+
+ - (А(к, и)х(к) + В(к, и))Т а(к + 1) (А(к, и)х(к) + В(к, и)) —
-
— ^ т (к)х — -х т ст(к)х,
G c = —фт(к + 1)0(к)х с (к, t P ) — - (0(к)х с (к, t P )) т ст(к)0(к)х с (к, t P )+
+ ^ т (к)х + -х т ст(к)х + ф с т (к р )х с (к, t P ) — ^ ст (к / )^(к)х+
+ -х ст (k,t р )а с (k,t р )х c (k,t р ) — -(^(к)х) т ст с (к, t / )^(к)х,
R c = хсТ(ф с + ^ с (к, t))(А c (t, и с )х с + В c (t, и с )) —
-
— -ac (t, и с )|х с | 2 — b c (t, и с ) + -ф с т х с + -х с тгг с (к, t)х c ,
-
2. Метод глобального улучшения
L = G — ^ R + ^
K \ K ‘ \ k F K ’
Здесь L — обобщенный лагранжиан, который на множестве D , как показано в [12] , совпадает с исходным функционалом I . В соответствии с общей процедурой [12] решение поставленной задачи сводится к исследованию на экстремум введенных конструкций по указанным аргументам при каждом к, t.
В работах [17 , 18] был предложен метод глобального улучшения управления, его аналог для ДНС получен в работе [12] , а модификации для линейных ДНС и билинейного случая в [19, 20] . Для однородных процессов один из возможных подходов к реализации указанного метода дан в [21] . Рассмотрим далее его модификацию для класса линейно-квадратических ДНС (1) – (4) , но предварительно укажем исходные предпосылки.
Предположим, что X (k) = R m(fc) , X c (z,t) = R n(fc) , t I = т (z), t p = ”d(z), k I , x i и k p — заданы, x c p E R n(fc) .
Задан элемент m 1 E D и требуется найти элемент m 11 E D такой, что I (m11) < I (m1) . Функции p (k, x (k)) , p c (z, t, xc) найдем из условий:
R (k, x(k'),uI(k)^ ^ min, G (x) ^ max,
R c (z, t, x c (k, t) , u c (k, t)) ^ min, v ' Xе
Gc (z,xc(t p ,z)) - I
T ( Z )
R c (z(k), t, x c (t, z), u cI (k, t))dt ^ max,
X
где xc(t, z) — результат операции в (7) . Минимизация и максимизация производится по областям, где ожидается прохождение улучшенной траектории. Такие области, как правило, известны в практических приложениях.
Эти условия могут быть выполнены неоднозначно и оставляют значительную свободу выбора функций p и pc. Если потребовать, чтобы левые части в этих условиях не зависели от x, xc, то получится дискретно-непрерывная цепочка относительно p, рс, описываемая уравнениями типа Беллмана, не содержащими операции поиска максимума по и, ис и, следовательно, линейными относительно ус:
-
(9) у (к,х) = у (к + 1,/ (к, х (к) , и 1 (к))) , к Е К \ К ‘ \к Р ,
-
(10) у (к р , х) = —F (х) , ) с = —Н с (z,t,xc,у^ K c ) ,
Н с (z, t, х с , ис\р) = р т / с (z, t, х с , и а ) ,
-
(11) ) с (z,t F ,х р ) = у (к + 1,в (z,x p )) ,
-
(12) у (к,х) = ) с (z,T (z) ,^ (z)) , к Е К ’ ,
которая разрешается в порядке следования от к р к к ; .
Пусть
U (к, х) = arg max R (к,х (к) , и (к)) , u ^ U ( k,x )
и с (z,t,х с )= arg max R с (z,t,х с ,и с ) .
u c e u c ( z,t,x c )
Тогда из заданной дискретно-непрерывной системы и начальных условий при полученных управлениях находятся функции X II (к), х сII (к,t) и программы управлений:
и11 (к) = U (к, XII(к)) , I (к, t) = Кс (к, t, хп(к), хс11(к, t)) , т.е. элемент mII. Повторяя итерационно эти операции, получим улучшающую последовательность {ms}.
Теорема 1. Для элементов m I и m II справедливо неравенство I (m I ) > I (m II ) .
Доказательство. Покажем, что I (m II ) — I (m I ) < 0. Имеем
I (m II ) — I (m I ) = L (m II , ) I , ) с1 ) — L (m I , ) I , ) с1 ) =
= G (x 11, ) 1 ) —G (x 1 ,) 1 ) — ^ (R (к, X II (к), и 11 (к), ) I ) —
K \ K ‘ \ k F
-
— R (к, x I (к), и 1 (к), у 1 )) + ^ (G с (z II (к), ) I , ) с1 ) —
K ′
-
— G с (z I (к), у 1 , у с1 )) — У (R с (z II (к),t, x сII (t), и сII (t), у 1 , у с1 ) —
T ( Z )
-
— R с (z I (к), t,x сI (t), и сI (t), у 1 , у с1 )) dt = A i — Д 2 + Д 3 — Д 4 .
где Д 1 = G (х 11) — G (х1) < 0 в силу условия (6) .
При этом
Д 2 = ( R (к, ж 11 (к) , Мп (к) , y I ) — R (к, ж 1 (к) , и 1 (к) , у 1 )) =
K \ K ‘ \ k F
= Е ( R (к, ж 11 (к) ,ип (к) , y I ) — R (к, ж 11 (к) ,u I (к) ,y I )) + K \ K ‘ \ k F
+ ^^ (R (к, ж 11 (к) , и 1 (к) , у 1 ) — R (к, ж 1 (к) , и 1 (к) , у 1 )) > 0
K\K‘\kF согласно (5).
Далее имеем
Д з = E (° C (Z II (к) , У 1 , y CI ) — G C (Z I (к), У 1 , y CI )) < 0 K ′
и
Д 4 = У (R c (z II (к) , t, ж I (t), u cII (t), у 1 , y cI )
T ( Z )
—R c (^(к), t, ж с 1 (t), u c I (t), y I , y c I )) dt =
= I (RC ( Z II (к), t, ж с11 (t), u cII (t), y I , y cI ) T ( Z )
—R C ( z ii ( / ) , t, ж cII (t), u CI (t), y I , y CI )) dt+
+ I (R C (z II (.к),t,ж c II (t),u c I (t),yI,y c I ) —
T ( Z )
—R C (г 1 (к), t, ж cI (t), u CI (t), y I , y CI )) dt > 0
в силу условий (7) , (8) . Тогда
I (mn) — I (m I ) = Д 1 — Д 2 + Д 3 — Д 4 < 0.
□
Вернемся к исходной задаче и рассмотрим соотношения (9) – (12)
более подробно. Из указанных равенств получаем:
-
(13) '(к р ) = 0, о(к р ) = 0,
-
(14) '(к) = Ат(к, u I )'ф(k + 1) + Ат(к, u I )ст(к + 1)В(к, u I ),
-
(15) о(к) = А т (к, п1)^(к + 1)A(k,u I ) — а(к,и1')Е, к Е К \ К ‘ \к р ,
-
(16) ' c = AcT(t, ucl)' c + ocB c (t, u cI ),
-
(17) о c = —a c (t, ucl)E + CT c A c T (t, u cI ),
-
(18) ' c (k,t p ) = 6 т (к)'(к), A'A-Jp ) = в т а(к)в,
-
(19) '(к) = ( T ' c (k +1,t j ), о(к) = (^(к +1,t t )( к Е К ’ .
Замечание 1. Если уравнения (1) , (3) содержат линейные слагаемые:
х°(к + 1) = х 0 (к) + а°(к, u)x + — a(k, u)|x| 2 + Ь(к, и),
X c 0 =ac0(t,u c )x c + |a c (t,u c )|x c | 2 + b c (t,u c ), где a 0 (k,u), a c 0 (t,u c ) — вектор-функции строки, то уравнения для ', ' c примут вид:
'(к) = —Ea 0T + А т (к, u I )'(k + 1) + А т (к, u I )ст(k + 1)В(к, u I ), ' c = —Ea c0T + A cT (t, u cI )' c + B cT (t, u cI )j c .
Нетрудно видеть, что выражения для поиска функций U,U c пополнятся дополнительными слагаемыми.
Таким образом, алгоритм метода состоит из следующих этапов:
-
1. Задается элемент т 1 .
-
2. Справа налево решаются системы уравнений (13) – (19) относительно вектор-функций ', ' c и матриц о, ос.
-
3. Находятся функции U, U c из условий
U (к,х) = arg max ('(к + 1)T)B(k,u) — b(k,u)+ u e u ( fc,x )
-
+ - (А(к)х(к) + В ( к, u)) T о ( к + 1)(А(к)х(к) + В ( к, u)), U c ( z,t, x c ) = arg max f (' c (k, t) + о c (k, t)x c ) T B c (t, u c ) — b c ( t, u c ) ) .
-
4. Полученные управления подставляются в исходную ДНС. Тем самым находится элемент m 11 .
u = E U = ( z,t,i = ) V /
Подчеркнем тот факт, что управления й, й с зависят от переменных состояний верхнего и нижнего уровней линейно-квадратическим образом, т.е. дают решение в форме приближенного синтеза оптимального управления. Такую форму решения можно рассматривать как один из видов АКОР для ДНС. При этом, в отличие от традиционной задачи АКОР, которая получается при линейно-квадратической аппроксимации исходной нелинейной задачи по состоянию и управлению, здесь рассматривается аппроксимация только по состоянию, а управление остается нелинейным, ограниченным исходным множеством, что позволяет использовать имеющиеся ресурсы управления полностью.
Процесс итераций заканчивается при выполнении условия
^s+l — Is | < е, где е — заданная точность вычислений.
Заметим, что если функционал ограничен снизу, то построенный итерационный процесс сходится по функционалу. Действительно, в силу теоремы 1 алгоритм генерирует монотонную по функционалу улучшающую последовательность, которой соответствует монотонно убывающая числовая последовательность I s = I(m s ), сходящаяся, как известно из анализа, к некоторому пределу I * .
Пример 1. Рассматривается нелинейная задача:
х1 = (х2 )2(х2 — 1)2 + (t — 1)х2 + Х2й, X2 = й, х1(0)=0, х2 (0) = 0,
|й| < 2, 0 < t < 2, I = х 1 (t p ) ^ inf, t p = 2.
Эта задача при предположении, что управление не ограничено, сводится к производной задаче (первого порядка) [22 –24] :
у = х 1 - 2 ( х 2 ) 2 ,
^ inf,
у = (х 2 ) 2 (х 2 — 1) 2 + (t — 1)х 2 ,
I = (« г + 2(х Р ) 2 )
которая решается непосредственно минимизацией правой части и функционала по новому управлению. Нетрудно видеть, что правая часть указанного уравнения — выпуклая функция по переменной х 2 и, следовательно, ее минимум достигается в стационарной точке.
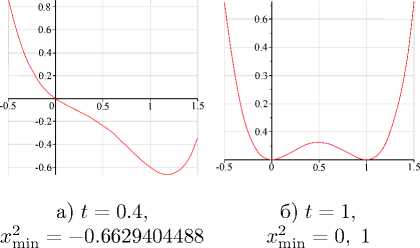
Рис. 1. Графики х 2 для некоторых t
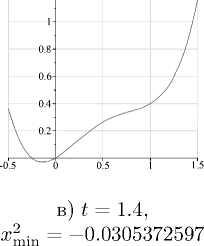
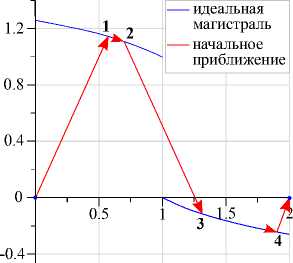
Рис. 2. Идеальная магистраль и начальное приближение
Для его поиска при фиксированном t с некоторым шагом на отрезке [0, 2] находился минимум функции (ж 2 ) 2 (ж 2 — 1) 2 + (t — 1)ж 2 . На рис. 1 представлены графики ж 2 для некоторых значений t. Непосредственно из выражения функционала следует, что его минимум достигается на управлении ж ^ = 0. Тем самым получается идеальное магистральное решение исходной задачи с кусочно-непрерывной функцией ж 2 (t) в качестве управления. Это решение модифицируется естественным образом — заменой в окрестностях точек разрыва решениями уравнения ж 2 = к при |к| < 2. Получается кусочно-гладкая функция ж 2 (t), используемая далее как начальное приближение в итерационной процедуре минимизации функционала (рис. 2) .
Производится тейлоровская линейно-квадратическая аппрокси- мация исходной системы по х"2 в окрестности траектории текущей s-й итерации:
-
(21) х 1 = a(t) + b(t)(x 2 — x 2 (t)) + -c(t)(x 2 — x 2 (t))' 2 + х 2 ^ х 2 = u,
x 1 (0) = 0, х 2 (0) = х 0 , |u| < 1, 0 < t < 2,
a(t) = (x 2 ) 2 (x 2 - 1) 2 + (t - 1)x 2 ,
b(t) = 2x 2 (x 2 — 1)(2x 2 — 1) + t — 1, c(t) = 2((2x 2 — 1) 2 + 2x 2 (x 2 — 1)).
Преобразованная система допускает аналогично исходной нелинейной переход к производной системе с использованием того же преобразования у = х 1 — 2 (x 2 ) 2 :
-
(22) у = a(t) + b(t)(x 2 — ^to) + 2 c ( t )( x 2 — x 2 ( t )) 2 .
Если присоединить уравнение x 2 = u, то получится удобная запись системы (21) в новых переменных (у, х 2 ), где управление входит лишь в одно уравнение.
Для последовательного улучшения приближенного магистрального решения представим его как дискретно-непрерывный процесс, предполагая, что его структура по итерациям не меняется. Будем рассматривать t p (к) как дискретное управление u 1 . В данном случае K ‘ = K \k p = 0,..., 4. Векторы переменных верхнего (дискретного) уровня обозначим через х, u, а нижнего (непрерывного) уровня — через х с , u c . Будем иметь:
х 1 (к +1)= u 1 , х 1 (к) < u 1 < u 1max , к Е K ‘ , U max = 2, х 1 (0) = 0.
При к = 2, 4:
Qi = х2(к), х/2 = х3(к), qc = b(t)(:Ec2 — x22(t)) + 2c(t)(xC2 — x22(t))2, хс2 = uc, t Е [х1 (к), u1 (к)], х2(к + 1) = qcF(к), х3(к +1) = хр2(к), |uc| < 2.
При к = 1, 3:
q j = х 2 (к), t Е [х 1 (к), к 1 (к)], qc = b(t)(х е2 - х е (к, t)) + 2c(t)(х е2 - x = 2 (t)) 2 , х 2 (к + 1) = q c F (к) - 2 (х > 2 (к)) 2 , х 3 (к + 1) = к 2 (к), b(t) = 2х 2 (х 2 - 1)(2ж 2 - 1) + t - 1, c(t) = 2((2ж 2 - 1) 2 + 2ж 2 ( х 2 - 1)).
Переменная х е1 (к, t) находится по формуле х е1 = q c + а + х е2 - u s , a(t) = (X g 2 ) 2 (X g 2 -1) 2 + (t- 1)х ^ 2 . Здесь переменная q c введена с целью преобразования линеаризованной модели к виду, рассмотренному в теории.
Заданы начальные условия и минимизируемый функционал: х 1 (0) = 0, х 2 (0) = 0, х 3 (0) = х 3 , I = х 2 (5).
Обратим внимание, что на разных этапах используются разные непрерывные системы: на четных этапах — исходная преобразованная система, а на нечетных — производная.
Соответствующая ДНС для сопряженных переменных ф, ф е , ст, ст е имеет следующий вид.
При к = 2, 4: ф(5) = 0, ст(5) = 0, ф = (ф 1 , ф 2 , ф 3 ), ф е = (ф е1 , ф е2 ), ст, ст е — матрицы размера 3 х 3, 2 х 2, ^ = (0,1,1),
^(к) = ^ф е (к + 1, t j ), ст(к) = < т ст е (к + 1, t j )£, ^) е = Е (0, -Ь) + ст е (0,1) T , <ст е = -cE,
010 010
Ф ( к,t F )= 0 0 1 ^ (к) , ст ( к,t F )= 0 0 1 ст(к)
При к = 1, 3:
тф е = -b, ст е = -с, ф е (к,t F ) = ф 2 (к), ст е (к,t F ) = ст 22 (к), Ф(к) = ^ф е (к +1,t j ), ст(к) = ^ Т ст е (к +1,t j )^, ^ = (0,1,0).
Здесь ст 22 — элемент матрицы ст.
Управляющие воздействия находятся по приведенным ниже формулам.
Таблица 1. Изменение функционала по итерациям
|
№ итерации |
Значение функционала |
|
0 |
-0.285436 |
|
1 |
-0.296333 |
|
2 |
-0.300289 |
|
3 |
-0.300284 |
При к = 2, 4:
й 1 (к, х) = argmax(-^ 1 (к + 1)й 1 +
+ |(й1^
с
(к),х
с
р)ст (к + 1)(й
1
, q
c
F
(к), х
^
2
)
т
,
й
с
(z, t, х
с
)
= argmax(^
c
+
ас(q
c
, х
с2
))
т
(c, йс)т(фс+
+ ^c(qc,xc2)), |йс|< 2, где qc = b(t)(xc2 — хс2(к, t)) + 2c(t)(xc2 — xC2(t))2.
При к = 1, 3:
й 1 (к,х) = argmax(^1^ + 1)й 1 + |(й 1 , qcF(к) —
-
— |(х' р 2 (к)) 2 ,й2)а(к +1')(й1,q c F (к) — |(х' р 2 (к)) 2 ,й 2 ) т ), й 2 (к,х) = argmax(^ 3 (k + 1)й 2 + -(й 1 , q F (к) —
-
— 2(х р (к))2,й 2 )ст(к +1)(й 1 ,q c F (к) — |(х' р 2 (к)) 2 , й 2 ) т ),
й с (z, t, х с ) = х с2 = argmax(—b(t)(x c2 — x C 2 (t)) —
-
— 2 c (t)( x c2 — x C 2 (t)) 2 ) .
-
3. Заключение
Расчеты проводились предложенным в работе алгоритмом. В качестве начального приближения использовалась траектория, приведенная на рис. 2 . Решение получено за 3 итерации. Соответствующие управления и траектория x 2 (t) приведены на рис. 3, 4 . Изменение функционала по итерациям дано в таблице 1.
Для сравнения эта же задача в исходной постановке без преобразования к ДНС и специального выбора начального приближения была решена тем же методом при начальном приближении управления й(t) = 0 на всем заданном отрезке времени. Близкое решение
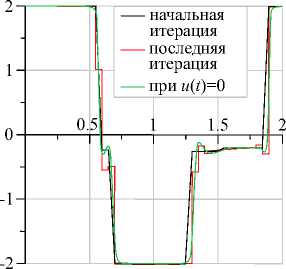
Рис. 3. Управление на начальном приближении и на итерациях
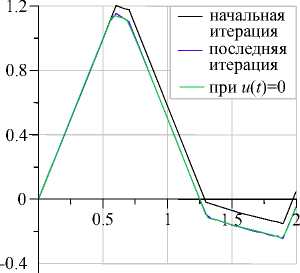
Рис. 4. Траектория ж2 на начальном приближении и на итерациях со значением функционала I = -0.302669 получено за 85 итераций. Траектория и управление также приведены на рис. 3, 4 и носят аналогичный характер.
Таким образом, в работе предложена математическая модель линейно-квадратической по состоянию ДНС с управляемыми коэффициентами, для которой дана конкретизация общих достаточных условий оптимальности и построен метод глобального улучшения управления с линейно-квадратическими функциями Кротова. Доказана теорема об улучшаемости начального приближения.
Этот метод особенно эффективен для вырожденных задач оптимального управления с магистральными решениями, широко распространенных на практике. Это подтверждается проведенными вычислительными экспериментами на тестовом примере. Найденное начальное приближение в магистральной форме дало значительный эффект по сравнению с традиционным случайным выбором начального приближения из множества допустимых управлений.
Список литературы Линейно-квадратические дискретно-непрерывные системы с управляемыми коэффициентами
- С. В. Емельянов (ред.). Теория систем с переменной структурой, Наука, М., 1970.
- В. И. Гурман. К теории оптимальных дискретных процессов//Автоматика и телемеханика, 1973, №6. С. 53-58.
- С. Н. Васильев. Теория и применение логико-управляемых систем//Труды 2-ой Международной конференции "Идентификация систем и задачи управления", SICPRO’03, 2003. С. 23-52.
- А. С. Бортаковский. Достаточные условия оптимальности управления детерминированными логико-динамическими системами//Информатика. Сер. Автоматизация проектирования, т. 2-3, ВНИИМИ, М., 1992. С. 72-79.
- Б. М. Миллер, Е. Я. Рубинович, Оптимизация динамических систем с импульсными управлениями, монография, Наука, М., 2005, 429 с.
- J. Lygeros. Lecture Notes on Hybrid Systems, University of Cambridge, Cambridge, 2003, 70 pp.
- A. J. Van der Shaft, H. Schumacher. An Introduction to Hybrid Dynamical Systems, Springer-Verlag, London, 2000, 176 pp.
- В. Ф. Кротов, В. И. Гурман. Методы и задачи оптимального управления, Наука, М., 1973, 448 с.
- В. Ф. Кротов. Достаточные условия оптимальности для дискретных управляемых систем//ДАН СССР, Т. 172, №. 1. 1967. С. 18-21.
- В. И. Гурман, И. В. Расина. Дискретно-непрерывные представления импульсных решений управляемых систем//Автоматика и телемеханика, 2012, №8. С. 16-29.
- И. В. Расина. Дискретно-непрерывные модели и оптимизация управляемых процессов//Программные системы: теория и приложения, 2011, №5(9). С. 49-72, URL http://psta.psiras.ru/read/psta2011_5_49-72.pdf.
- И. В. Расина. Итерационные алгоритмы оптимизации дискретнонепрерывных процессов//Автоматика и телемеханика, 2012, №10. С. 3-17.
- А. М. Летов. Аналитическое конструирование регуляторов, II//Автоматика и телемеханика, Т. 21, №. 5. 1960. С. 561-568.
- А. М. Летов. Динамика полета и управление, Наука, М., 1969, 360 с.
- R. Kalman. Contributions to the theory of optimal control//Bul. Soc. Mech. Mat., 5 (1960). P. 102-119.
- В. И. Гурман, И. В. Расина. Улучшение и приближенно-оптимальный синтез управления в окрестности опорной траектории//Автоматика и телемеханика, 2011, №12. С. 24-37.
- В. Ф. Кротов, И. Н. Фельдман. Итерационные методы решения экстремальных задач//Моделирование технико-экономических процессов, Изд-во Московского экономико-статистического института, М., 1978. С. 22-35.
- В. Ф. Кротов, И. Н. Фельдман. Итерационный метод решения задач оптимального управления//Изв. АН СССР. Техн. киберн., 1983, №2. С. 160-168.
- И. В. Расина, О. В. Батурина. Оптимизация линейных по состоянию дискретно-непрерывных систем//Автоматика и телемеханика, 2013, №4. С. 80-90.
- И. В. Расина, О. В. Батурина. Оптимизация управления в билинейных системах//Автоматика и телемеханика, 2013, №5. С. 102-113.
- В. И. Гурман, Е. А. Трушкова. Приближенные методы оптимизации управляемых процессов//Программные системы: теория и приложения, 2010, №4(4). С. 85-104, URL http://psta.psiras.ru/read/psta2010_4_85-104.pdf.
- В. И. Гурман, М. К. Ни. Вырожденные задачи оптимального управления, I//Автоматика и телемеханика, 2011, №3. С. 36-50.
- В. И. Гурман, М. К. Ни. Вырожденные задачи оптимального управления, II//Автоматика и телемеханика, 2011, №4. С. 57-70.
- В. И. Гурман, М. К. Ни. Вырожденные задачи оптимального управления, III//Автоматика и телемеханика, 2011, №5. С. 32-46.
