Линейные перемещения с микронной и субмикронной точностью

Автор: Штых Дмитрий Владимирович
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Конверсионные, НАНО- и инновационные технологии
Статья в выпуске: 1-2 т.14, 2012 года.
Бесплатный доступ
Рассмотрены сферы применения приводов точных линейных перемещений, определены характерные комплексы требований к параметрам движений выходного звена. Проведен системный анализ возможностей повышения технических характеристик линейных актуаторов, сделан вывод о перспективности применения электромеханических мехатронных модулей (для позиционирования с точностью порядка 1 нм и непрерывного перемещения с кинематической точностью порядка 1 мкм).
Линейное перемещение, точность
Короткий адрес: https://sciup.org/148200668
IDR: 148200668 | УДК: 621.83.06
The linear motions with micron and submicronic accuracy
Spheres of application the drives of precise linear motions are considered, the characteristic complexes of requirements to parameters of output link movements are defined. System analysis of possibilities of increase the technical characteristics of linear actuator is carried out, the conclusion on prospects of use the electromechanical mechatronic modules (for positioning with accuracy about 1 nanometer and continuous moving with kinematic accuracy about 1 micron) is drawn.
Текст научной статьи Линейные перемещения с микронной и субмикронной точностью
В связи с интенсивным развитием таких отраслей народного хозяйства как микроэлектроника, робототехника, микромеханика, точное машиностроение, биология, медицина и др. растёт необходимость в электромеханических устройствах для перемещения различных объектов, в том числе и миниатюрных, с микронной и субмикронной точностью, а также совершения над ними каких-либо операций (например, операции микросборки). Решение поставленных задач осуществляется путём применения различного рода приводов линейных перемещений (электромеханических, пьезоэлектрических, магнито- и электрострикци-онных, электростатических и др.). Однако нет чётких границ областей применения актуаторов, использующих тот или иной принцип действия, что объясняется непрерывным совершенствованием конструкций, улучшением технических характеристик, расширением возможностей мехатронных модулей. Выбор конкретной конфигурации модуля в процессе проектирования, определяется требованиями к перемещению рабочего органа.
Рассмотрим некоторые сферы применения приводов линейных микро- и наноперемещений с целью систематизации требований к качеству движения выходного звена (таблица 1).
Таблица 1. Требования к движению выходного звена приводов линейных перемещений в различных сферах применения
|
Сферы применения |
Нагрузка, Н |
Величина перемещения, мм |
Разрешающая способность, мкм |
Характер движения |
|
микросборка |
- |
~1 |
0,05÷0,2 |
непрерывный |
|
литография |
- |
1÷10 |
0,05÷0,2 |
дискретный |
|
микрохирургия |
1÷10 |
~100 |
5÷50 |
непрерывный |
|
остеосинтез |
800÷1200 |
5÷50 |
10÷20 |
дискретный |
|
выращивание монокристаллов |
500÷5000 |
~1000 |
1÷10 |
непрерывный |
|
прецизионное металлорежущее оборудование |
~1000 |
~1000 |
0,5÷1 |
дискретный |
|
10÷1000 |
~1000 |
1÷5 |
непрерывный |
|
|
системы слежения |
10÷1000 |
~1000 |
1÷5 |
непрерывный |
В приведенной таблице дискретный характер движения относится к таким перемещениям рабочего органа, при которых не существенны
точность и плавность движения между начальной и конечной точками, а важна лишь точность позиционирования. Примером может служить позиционная система ЧПУ. При непрерывном характере движения требования по точности и плавности предъявляются на всём рабочем ходе выходного звена (как при работе контурной системе ЧПУ). Анализируя представленные сферы применения приводов линейных перемещений, определим характерные сочетания требований, определяющие тип и возможный состав применяемого привода (таблица 2).
Таблица 2. Систематизация требований предъявляемых к качеству движения выходного звена приводов линейных перемещений
|
Рабочий ход, мм |
Нагрузка, Н |
Разрешающая способность, мкм |
Вариант конфигурации привода |
||
|
двигатель |
передача |
датчики |
|||
|
до 1 мм |
~10 000 |
~10-4 |
пьезокерамический |
нет |
интерферометрический |
|
1÷10 |
<10 |
0,001 |
пьезокерамический |
фрикционная |
фотометрический |
|
10÷50 |
~1000 |
0,1 |
электрический |
винт-гайка |
оптический |
|
~1000 |
~1000 |
0,5÷2 |
электрический |
винт-гайка |
оптический |
Как видно из вышеперечисленных вариантов задач, немалая часть из них решается применением электромеханических приводов в различной комплектации. В связи с этим остаётся злободневной проблема улучшения технических характеристик электромеханических мехатронных модулей (таких, как точность, плавность, быстродействие и др.). Для лучшего понимания того, насколько и за счёт чего можно повысить качество движения выходного звена электромеханического модуля, рассмотрим структурную схему привода (рис. 1).
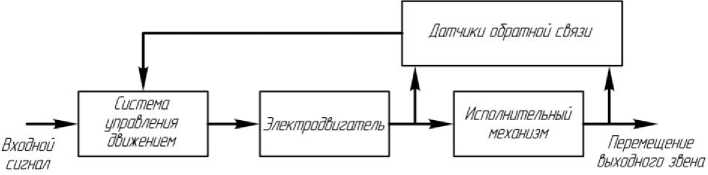
Рис. 1. Структурная схема электромеханического линейного актуатора
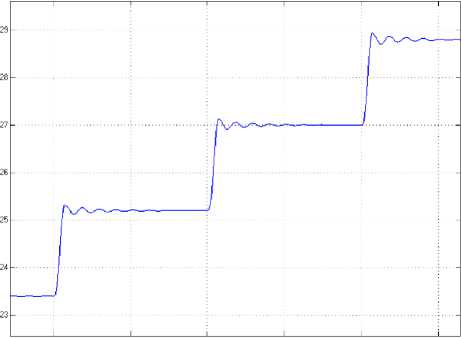
Электродвигатели, применяемые в приводах микроперемещений должны обеспечивать вращение вала, отражающее управляющий сигнал с максимально возможной точностью. В большинстве случаев для этих целей применяют двигатели постоянного тока ввиду лёгкости управления частотой вращения выходного вала. В последнее время широкое применение нашли шаговые двигатели, позволяющие исключить в некоторых случаях систему слежения и определять положение вала по количеству осуществленных шагов. Прерывистость движения частично компенсируется возможностью применения микрошагового режима (см. рис. 2), при котором можно добиться дискретности 160 000 шагов на один оборот вала и полностью устраняется применением векторного режима управления [3]. Сочетание в одной системе управления различных режимов значительно расширяет возможности приводов с шаговыми двигателями.
В качестве исполнительного механизма модуля, как правило, применяют передачи типа
«винт-гайка» в различных модификациях. В настоящее время наилучшими показателями точности и надёжности, быстродействия обладают шариковинтовые (ШВП) и роликовинтовые (РВП) передачи. Это достигается применением промежуточных тел качения, что значительно уменьшает трение в передаче, увеличивает кинематическую точность и нагрузочную способность передачи. В работе [1] проведен сравнительный анализ характеристик ШВП и РВП, в ходе которого выявлено значительное превосходство РВП над ШВП по многим техническим характеристикам.
Датчики должны обеспечивать своевременной поступление информации о положении входного и выходного звеньев исполнительного механизма с необходимой точностью, сигнал с датчиков должен иметь форму удобную для дальнейшей обработки системой управления движением. Например, фирма Heidenhain представляет серию датчиков линейных перемещений (абсолютных и инкрементальных) с шагом измерения до 0,1 мкм и разрешающей способностью 0,005 мкм [5]. Для более точного измерения перемещений используют промышленные интерферометры с разрешающей способностью порядка 1 нм [4].
Theta (degrees]
0.06 0.062 0.064 0.066 0.068 0.07
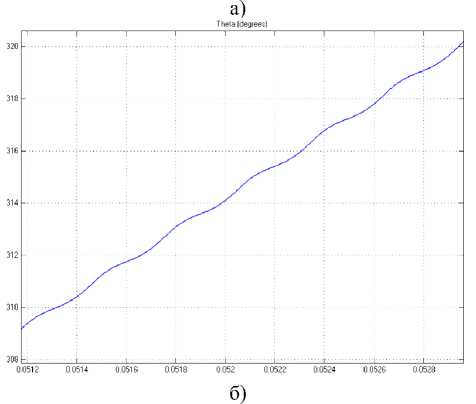
Рис. 2. Дискретность вращения выходного вала шагового двигателя в полношаговом (а) и в микрошаговом (б) режимах (моделирование в прикладном пакете Simulink системы компьютерной математики MATLAB)
Система управления движением представляет собой микропроцессорный блок, осуществляющий обработку информации о заданном и действительном перемещении выходного звена и формирующий сигнал управления, а также силовой блок, непосредственно управляющий работой электродвигателя. Важнейшим из параметров системы управления является быстродействие. Обеспечение необходимого быстродействия возможно совместно аппаратным и программным методами. Применение новейших электронных компонентов и соответствующего им программного обеспечения позволит не только увеличить быстродействие системы, но и расширить функциональные возможности привода. В настоящее время контроллеры управления шаговыми двигателями имеют возможность осуществления стабилизации разных параметров движения (положения, скорости, ускорения), опрос датчиков происходит с частотой порядка 20 кГц, инерционность управления ~5 мкс.
Теперь попробуем виртуально собрать мехатронный модуль линейных перемещений, обеспечивающий максимально возможные технические характеристики. В качестве двигателя применим шаговый электродвигатель, так как он позволяет осуществлять управление в шаговом, микрошаговом и векторном режимах при дискретности позиционирования до 160 000 шагов на оборот [3]. Исполнительный механизм – РВП с устройством выборки зазоров [1]. РВП позволяет получить высокие кинематическую точность (~0,1 мкм), редукцию (~0,1 мм/об), нагрузочную способность (~10 000 кН), скорость перемещения, КПД, надёжность. В качестве датчика положения используем интерферометр с разрешающей способностью 1 нм [4]. Так как система управления должна быть адаптирована под конкретные задачи, то программное обеспечение необходимо разработать и отладить по максимальному быстродействию и точности отработки управляющих сигналов.
Проанализируем возможности такого привода. В режиме дискретного движения (как при работе позиционной ЧПУ) точность позиционирования определяется разрешающей способностью датчика положения и шагового электродвигателя. Данная конфигурация позволяет теоретически получить точность позиционирования 0,625 нм. В режиме непрерывного движения точность и плавность определяется кинематической точностью передачи, которая находится в пределах 0,1 мкм и быстродействием системы управления. При небольших скоростях (в границах быстродействия системы управления движением) возможна динамическая коррекция перемещения по сигналам от датчика, что улучшит характеристики движения. При высоких скоростях плавность перемещения выходного звена увеличивается за счёт демпфирования приведённой инерционной массы ротора двигателя и передачи, являющейся фильтром высших гармоник.
Выводы: мы виртуально синтезировали электромеханический привод линейных перемещений с высокими техническими характеристиками, намного превышающими характеристики существующих модулей данного типа. Конечно, все рассуждения являются теоретическими, но показатели компонентов модуля взяты от лучших реальных образцов, поэтому создание таких мехатронных систем является реальной решаемой задачей. Данный вывод говорит о перспективности применения электромеханических приводов для осуществления линейных перемещений с микронной и субмикронной точностью.
Список литературы Линейные перемещения с микронной и субмикронной точностью
- Козырев, В.В. Конструкции роликовинтовых передач и методика их проектирования. -Владимир: Редакционно-издательский комплекс ВлГУ, 2004. 102 с.
- Жданов, А.В. Исследование показателей качества движения приводов линейных микроперемещений/А.В. Жданов, Д.В. Штых//Научно-технический вестник Поволжья. -Казань. 2012. №1. С.170-173.
- http://www.servotechnica.ru/catalog/type/brand/index.pl?id=18
- http://www.delcam-ural.ru/cai/lazernyy_interferometr_9
- http://www.heidenhain.ru/
