Макет для разработки программно-алгоритмического комплекса контроля объектов космического пространства

Автор: Махов Владимир Евгеньевич, Борисов Сергей Викторович, Широбоков Владислав Владимирович, Закутаев Александр Александрович
Рубрика: Управление сложными системами
Статья в выпуске: 1, 2019 года.
Бесплатный доступ
Разработаны компактный экспериментальный стенд и методика исследования характеристик объектов космического пространства на базе оптико-электронной системы. Макет спутника имеет роботизированную систему управления ориентации в пространстве, оптико-электронная система (ОЭС) регистрации изображения размещена на дистанционно управляемой подвижной платформе, обеспечивающей взаимную ориентацию регистрируемого макета спутника и ОЭС. На базе компьютерных технологий фирмы National Instruments разработана методика построения основных алгоритмов определения геометрических и динамических характеристик объектов наблюдаемого ОЭС космического пространства.
Космический аппарат, модель спутника, оптико-электронная система, оэс, космическое пространство
Короткий адрес: https://sciup.org/148309525
IDR: 148309525 | УДК: 528.8 | DOI: 10.25586/RNU.V9187.19.01.P.075
Layout for the development of software and algorithmic complex control objects outer space
A compact experimental stand and a technique for studying the characteristics of objects in outer space based on an optical-electronic system have been developed. The satellite model has a robotic orientation control system in space; an optical-electronic system (OES) image registration is placed on a remotely controlled mobile platform, ensuring the mutual orientation of the registered satellite and OES mockup. Based on the computer technologies of National Instruments, a method has been developed for constructing the basic algorithms for determining the geometric and dynamic characteristics of objects observed in OES of outer space.
Текст научной статьи Макет для разработки программно-алгоритмического комплекса контроля объектов космического пространства
Сегодня на земной орбите находятся тысячи функционирующих космических аппаратов (КА), а их общее количество вместе с отработавшими ресурс аппаратами превышает 12 тыс. единиц. Система контроля космического пространства – особая система, задачей которой является наблюдение за искусственными спутниками и иными космическими объектами космического пространства (КП) [20].
Все объекты КП имеют собственные индивидуальные характеристики, в том числе динамические. В связи с этим возникает целый ряд актуальных задач идентификации и определения пространственно-временных параметров для объектов КП, определения технического состояния космических аппаратов путем исследования деформации их поверхностей. Для решения этих задач в настоящее время успешно используются оптикоэлектронные системы. Для получения подробной информации об объектах КП специаль-
76 Выпуск 1/2019
но разрабатываются программно-алгоритмические комплексы. Совместная отработка аппаратной и программной частей системы контроля объектов КП в реальных условиях весьма затруднительна.
В данный момент продолжают разрабатываться новые схемы оптико-электронных систем (ОЭС), обеспечивающие, с одной стороны, более полное решение круга задач контроля КП, с другой – получение новых признаков объектов КП, включая дальностные и динамические портреты исследуемых объектов КП. Совершенствование и разработка новых ОЭС, разработка новых высокоэффективных алгоритмов требуют достаточно обширных экспериментальных исследований при значительных вариациях ситуаций и их дальностных параметров.
В связи со сказанным весьма актуальной является разработка компактных экспериментальных стендов, имитирующих космическую ситуацию и находящиеся в космосе объекты, обеспечивающих возможность исследовать эти объекты с разных ракурсов при различных углах визирования ОЭС и различных динамических характеристиках. Пока таких компактных стендов не существует.
Обзор
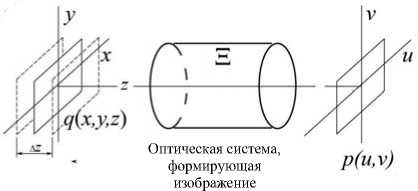
В настоящее время оптические системы (ОС) средств контроля КП представляют собой ОЭС и включают некоторую оптическую систему [15], формирующую яркостную структуру входящих в нее лучей от объектов в поле зрения ОЭС [2] (рис. 1- а ). Любая ОС имеет некоторую глубину резко отображаемого пространства Δ z на фотоприемнике (ФП) изображения.
б
Рис. 1. Модель ОЭС оптических регистраторов объектов в пространстве: а – оптическая система формирования изображения на ФП;
б – оптическая система регистратора светового поля
Махов В.Е., Борисов С.В., Широбоков В.В., Закутаев А.А. Макет для разработки... 77
Используемые для контроля КП ОЭС построены по схеме телескопа, который состоит из объектива и окуляра. В фокальную плоскость объектива вместо окуляра может помещаться регистратор изображения или матричный фотоприемник (МФП). В таком случае объектив телескопа с точки зрения оптики является проектирующим объективом, а сам телескоп превращается в астрограф. В этом случае происходит формирование изображения объективом телескопа. Разрешающая способность телескопа δ = λ/ D ( D – диаметр объектива) должна соответствовать разрешающей способности приемника изображения. Угловой размер объекта наблюдения по отношению к разрешающей способности определяет размер получаемого изображения в пикселях фотоприемника. В то же время линейное увеличение проектирующей ОС β определяется фокусным расстоянием объектива f’ и расстоянием до контролируемого объекта s : β = f’ /( s – f’ ). Для объекта размером R , проектируемого на МФП (размер фотодиода a ), количество пикселей N соответствующих размеру объекта, будет β = Na / R . Поэтому при разработке макета следует использовать длиннофокусный объектив с эквивалентным фокусным расстоянием чтобы обеспечить регистрацию масштабной модели спутника с заданного расстояния s соответствующим расстоянию S регистрации спутником объектов в КП, соответствующий по параметрам МФП.
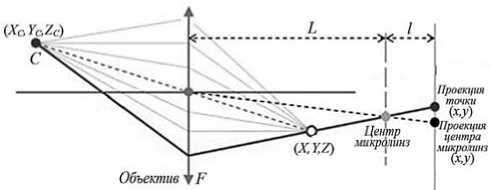
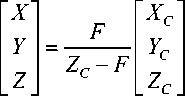
В первом приближении проектирующая ОС отображает объекты пространства, находящиеся в ее поле зрения на ФП, и может быть описана моделью тонкой линзы [3]:
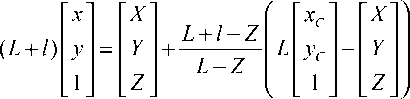
В то же время модель ОС с микролинзами, согласно представленной схеме (рис. 1-б) описывается следующим образом:
В качестве регистрирующей изображения части ОЭС широко используются МФП различного принципа действия и топологии [17]. МФП имеют разное число фотодиодов ( m × n ), размер их для различных моделей МФП варьируется в широких пределах (2–20 мкм). Как правило, твердотельные МФП имеют свою схему формирования сигнала. В настоящее время промышленность выпускает достаточное число моделей таких устройств, имеющих разнообразный интерфейс согласования с вычислительной платформой [12]. В ряде случаев используются более сложные микропроцессорные системы управления МФП, например цифровые камеры (ЦК) высокого разрешения, что требует иных принципов автоматизированного получения кадров изображения [7]. В технике также широко используются смарт-камеры, совмещенные с интеллектуальной микропроцессорной системой обработки получаемых сенсором изображений в реальном времени и сетевыми коммуникациями вычислительной платформы.
В настоящее время появились новые виды оптических регистраторов – ЦК светового поля (СП) [9], позволяющих зарегистрировать не только координаты, но и направления распространения яркостных лучей в одном кадре. Указанный принцип отображения объектов в объеме пространства реализуется путем введения в оптическую систему
78 Выпуск 1/2019
после основного объектива перед матричным фотоприемником массива микролинз (см. рис. 1- б ). Последующее получение плоских яркостных изображений (2D) заданного слоя пространства реализуется алгоритмами суммирования сигналов с подлинзовых фотодиодов МФП, что позволяет программно реализовать угловую фильтрацию входящих в оптическую систему лучей. Известно, что угловая фильтрация лучей является мощным средством формирования информационных признаков исследуемых объектов [8].
Для обработки изображений и выделения необходимой информационной составляющей об исследуемых объектах в настоящее время широко используются технологии фирмы National Instruments (NI – НИ) на базе графической среды программирования NI LabVIEW [22] и модуля технического зрения NI IMAQ Vision. Функции модуля технического зрения NI расширяют возможности среды разработки приложений НИ [1] в задачах, связанных с автоматизированным получением изображений от различных источников и их обработкой. Так как среда программирования NI LabVIEW модульная и иерархичная, она позволяет использовать функции других модулей фирмы НИ, обеспечивая также все виды сетевых коммуникаций с вычислительными платформами [16].
Цель работы
Разработка универсального компактного макета контроля объектов космического пространства для экспериментальной отработки программно-алгоритмического комплекса получения заданных информационных характеристик контролируемых объектов, построение методики для разработки основных алгоритмов идентификации и определения заданных характеристик объектов космического пространства в статическом и динамическом режиме.
Разработка экспериментального стенда
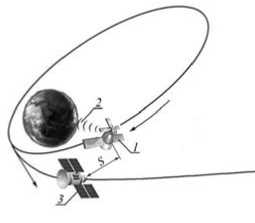
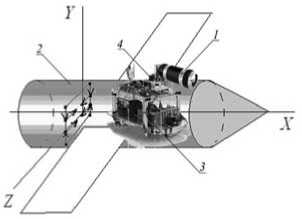
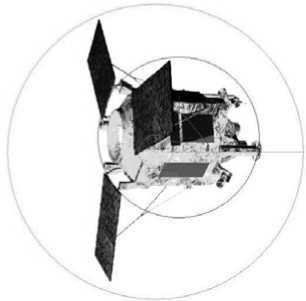
При разработке экспериментального стенда использована спутниковая модель контроля КП (рис. 2). Данная модель включает в себя автономный спутник 1 с управляемой ОЭС (рис. 2- а ), который осуществляет наблюдение сектора КП и передачу полученных или обработанных данных на стационарный наземный пункт 2 . Интересуемый объект КП (спутник) 3 , двигающийся по своей орбите, в определенный момент времени попадает в поле зрения ОЭС. Во время движения по своим орбитам изменяется расстояние S между контролируемым и контролирующим спутниками. Необходимо также учитывать, что в каждый момент может меняться ориентация контролируемого спутника относительно ОЭС на контролирующем спутнике.
Таким образом, в разрабатываемом макете системы контроля КП следует в первую очередь учитывать возможность позиционирования макета спутника, изменения его ракурса относительно ОЭС. Предполагаемое расположение ОЭС обзора КП на контролирующем спутнике показано на рисунке 2- б , она должна иметь возможность ориентации по двум угловым координатам. Угловую ориентацию ОЭС 1 в горизонтальной и вертикальной плоскостях в собственной системе координат спутника 2 ( XYZ ) обеспечивают специальный контроллер 3 и система приводов 4 углового позиционирования ОЭС. Такая система позволяет осуществлять обзор КП или удержание в поле зрения интересуемого объекта.
Представленная модель КП с движением спутников и необходимостью позиционирования ОЭС (см. рис. 2) была учтена в процессе разработки компактного универсального стенда, имитирующего реальную ситуацию в КП. Учтены возможность изменения указанных параметров спутников и позиционирования ОЭС контролирующего спутника.
Махов В.Е., Борисов С.В., Широбоков В.В., Закутаев А.А. Макет для разработки... 79
а б
Рис. 2. Модель контроля космического пространства:
а – перемещение контролируемого и контролирующего спутников в КП; б – расположение ОЭС обзора на контролирующем спутнике
С целью задания максимальных дальностей между контролируемым и контролирующим спутниками S стенд был выполнен из двух независимых макетов. Система крепления и ориентации модели контролируемого спутника выполнена на специальной роботизированной подставке-манипуляторе (рис. 3- а ). В качестве прототипа крепления и ориентации спутника была выбрана роботизированная система [13]. Система крепления и ориентации модели контролируемого спутника обеспечивает закрепление модели спутника 1 на двухшарнирном электромеханическом узле 2 , она крепится на поворотной платформе 3 основания 4 , где расположен блок питания электроприводов. В данной модели предусмотрены подвижные рычаги 5 для закрепления и перемещения дополнительных элементов модели. Также имеется точечная фронтальная фотодиодная подсветка 6 . Пульт управления 7 включает реверсивные приводы подвижных механических узлов системы для ориентации модели, обеспечивая изменение ракурсов макета контролируемой модели спутника по двум угловым координатам и изменение положения макета спутника по высоте.
Регистрирующая изображение ОЭС выполнена в виде отдельной роботизированной системы регистрации изображения (рис. 3- б ).

а

б
Рис. 3. Роботизированный макет установки исследования объектов КП: а – автоматизированная модель ориентации спутника;
б – роботизированная система ОЭС регистрации модели спутника
80 Выпуск 1/2019
Конструктивная и кинематическая схемы автоматизированного узла позиционирования модели контролируемого спутника представлены на рисунке 4. Размерные параметры и возможности позиционирования макета спутника показаны на рисунке 5.
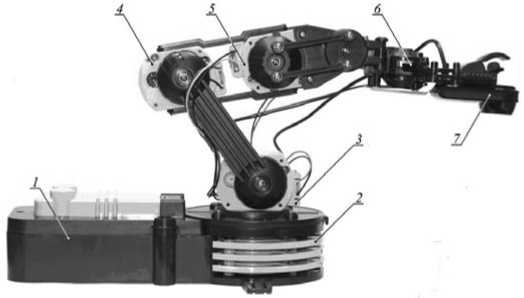
Рис. 4. Конструктивная кинематическая схема узла позиционирования модели:
1 – основание; 2 , 3 – узел горизонтального вращения; 4 , 5 – узел вертикального наклона;
6 – узел наклона; 7 – узел крепления спутника
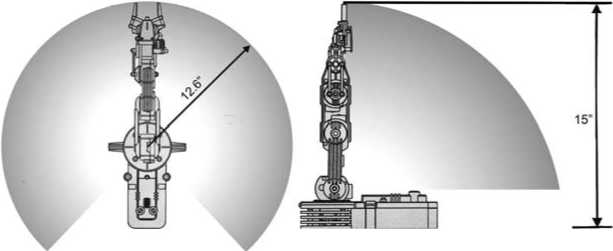
Рис. 5. Размерные параметры узла позиционирования спутника
Роботизированная система ОЭС регистрации модели спутника представлена на рисунке 3- б . В ее основе лежит подвижная платформа 1 . Перемещение платформы 1 в горизонтальной плоскости осуществляется четырьмя роликовыми колесами 2 специальной конструкции с независимыми электроприводами, что обеспечивает возможность осуществить любую траекторию движения ОЭС с заданной скоростью, включая развороты ее на месте. Внутри платформы расположены сами электроприводы колес и аккумуляторы разъемы подзарядки и ряд других конструктивных элементов. В блоке 4 (см. рис. 3- а ) расположены контроллер реального времени и другие электронные компоненты. Верхняя часть конструкции имеет систему поворотных рычагов 5 ориентации верхней крепежной площадки 6 по высоте и наклону. На верхней площадке закреплялось сменное крепление модели спутника . Вся система имеет беспроводное управление с компьютера по модулю Wi-Fi. Роботизированная система построена на базе контроллера реального времени.
Махов В.Е., Борисов С.В., Широбоков В.В., Закутаев А.А. Макет для разработки... 81
Аналогичные конструкцию макета можно строить на базе конструкторов типа «Tetrix», совместимой также с платформой “LEGO Mindstorms” с контролером технологии NXT [10], который использовался нами ранее для создания автоматизированных лабораторных установок по оптике [18]. Таким образом, разработанный в исследовании стенд является аппаратно и программно масштабируемым решением, что позволяет в едином программном поле производить макетирование ситуаций КП и обработку полученных с ОЭС изображений.
Разработка программно-алгоритмического комплекса
Для разработки программно-алгоритмического комплекса макета контроля объектов КП использована среда разработки приложений фирмы National Instruments NI LabVIEW 2013 [8], обеспечивающая возможность построения распределенной контрольно-измерительной системы [19]. Среда разработки приложений NI LabVIEW модульная и иерархичная, позволяет использовать функции множества встроенных математических методов [21], а также методов, представленных в дополнительных модулях фирмы НИ. Например, модуль NI Advanced Signal Processing Toolkit включает все функции частотно-временного и вейвлет-анализа [4; 6], модуль NI Robotics Module – средства управления позиционированием ОЭС в пространстве. Программные средства НИ имеют высокую вычислительную эффективность [5], поэтому могут быть успешно использованы как на обычной вычислительной платформе, так и на целевой, обеспечивая контролируемую синхронизацию обработки потоков данных.
Как показывает анализ, набор функций модуля NI IMAQ-Vision, собственных функций среды NI LabVIEW, функций дополнительных модулей НИ обеспечивает широкие возможности решения большинства задач по контролю объектов КП, таких как анализ качества получаемого изображения, определение параметров формы объектов, ориентация исследуемых объектов. Все это достигается установкой параметров узлов обработки данных как в процессе построения алгоритмов, так и в процессе выполнения программы. Методика создания алгоритмов обработки изображений рассмотрена в работе [14]. Разработка и отладка алгоритма обработки и измерения проводились в приложении NI Vision Assistant 2013 [23].
Для разработанного макета был создан алгоритм (скрипт) обработки изображений различных спутников с целью определения его формы и координат (рис. 6). Описание и параметры использованных узлов обработки данных (функций) алгоритма (скрипта) представлены в таблице.
1 2 3 4 5 6

Original Image Color Plane Filters 1 Threshold Basic Morphology Adv, Morphology Extraction
7 8 9 10 11
0 @ @
Filters 2 Particle Analysis Geometry Binary Image Conversion
Inversion
Рис. 6. Алгоритм (скрипт) обработки изображения
82 Выпуск 1/2019
Функции скрипта обработки изображения
|
№ п/п |
Вид функции |
Функция |
Параметры |
Описание |
|
1 |
Original Image |
Выбор местоположения и файла |
Получает изображение |
|
|
2 |
□*а |
Color Plane Extraction |
RGB-Blue Plane |
Извлекает из изображения цветные плоскости (RGB, HSV или HSL) |
|
3 |
® |
Filter 1 |
Edge Detection-Laplacian → Kernel Size – 3, Divider – 0 |
Преобразует изображение выбранным методом фильтрации для выделения в изображении необходимой информации |
|
4 |
**1 |
Threshold |
Manual Threshold → Minimum – 100 |
Выбирает диапазон значений пикселей в изображении оттенков серого |
|
5 |
Morph |
Basic Morphology |
Dilate Objects → Size – 3, Iterations – 3, ИИВ Structuring Elements – 01ЕЗ QB83 |
Изменяет форму двоичных объектов в изображении |
|
6 |
01 |
Advanced Morphology |
Fill Holes |
Выполняет высокоуровневые операции в кластерах бинарных изображений |
|
7 |
® |
Filter 2 |
Edge Detection Canny → Sigma – 3, High Threshold – 1, Low Threshold – 0,5, Window Size – 25 |
Преобразует изображение выбранным методом фильтрации для выделения в изображении необходимой информации |
|
8 |
S+1H |
Particle Analysis |
Отображает результаты измерений для отдельных кластеров изображения |
|
|
9 |
■^1^ |
Geometry |
Rotation – 345,7 |
Изменяет геометрическое представление изображения |
|
10 |
Ц±^ |
Binary Image Inversion |
Изменяет динамику изображения, содержащего два разных оттенка серого |
|
|
11 |
^3 |
Conversion |
Unsigned 16 bit [0, 65535] |
Преобразует полученное изображение в указанный формат изображения |
Два изображения, получаемые на разных этапах работы представленного алгоритма, показаны на рисунке 7. В результате обработки каждого изображения получаются изображение контура объекта, его координаты, размерные параметры и идентификационные признаки. Функциональность алгоритма может быть расширена путем введения дополнительных функций обработки изображения и измерительных функций.
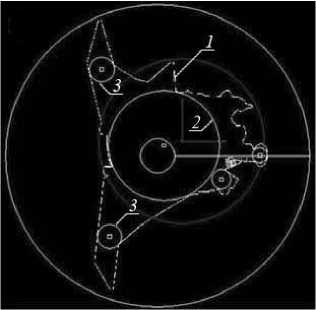
В итоге работы алгоритма находится кривая контура наблюдаемого спутника 1 , размер окружности эквивалентного размеру спутника 2 , координаты спутника по окружности 2 , характерные особенности формы в виде радиусов и координат, найденных вписанных в контур (бинарный кластер) окружностей 3 . Получаемая кривая контура может быть оцифрована с получением функциональной зависимости внешнего облика контролируе-
Махов В.Е., Борисов С.В., Широбоков В.В., Закутаев А.А. Макет для разработки... 83
мого спутника [11] – G ( x , y ) = 0, что может быть использовано для точной идентификации внешнего облика при регистрации с различных расстояний G ( mx , my ) = 0. Масштаб m идентификации облика определяет дальностные параметры. Аналогично могут быть получены другие информационные признаки контролируемого спутника.
а
б
Рис. 7. Результаты работы алгоритма обработки изображения:
а – изображение градации серого, зона поиска границ, поиск эквивалентной окружности по границам; б – бинарное изображение, нахождение вписанных окружностей в бинарный кластер нахождение кривой контура границ
В результате проведенных исследований разработаны компоновка экспериментального и демонстрационного стендов работы роботизированной системы контроля КП и программное обеспечение дистанционного управления моделью контролирующего спутника и получения результатов контроля (рис. 8). На мониторе отображаются этапы работы алгоритма обработки полученных изображений.
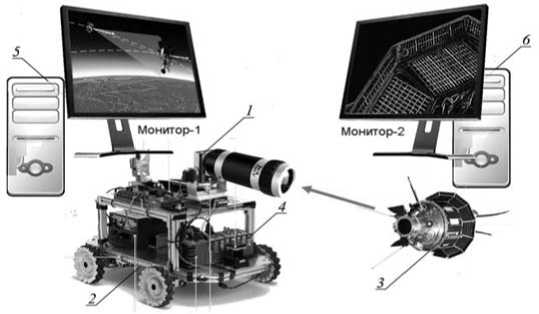
Рис. 8. Структура демонстрационного стенда системы контроля объектов КП:
1 – ОЭС; 2 – модель контролирующего спутника; 3 – модель контролируемого спутника;
4 – система управления моделью контролирующего спутника; 5 – компьютер демонстрации объектов КП; 6 – компьютер демонстрации контроля
Выпуск 1/2019
Для практического использования разработанные алгоритмы объединялись в логическую схему решаемой задачи для предполагаемых объектов КП в приложении промышленной автоматизации NI Vision Builder AI 2018 [24] (рис. 9), которое может быть использовано для моделирования процесса идентификации объектов на тестовых изображениях.
а
б
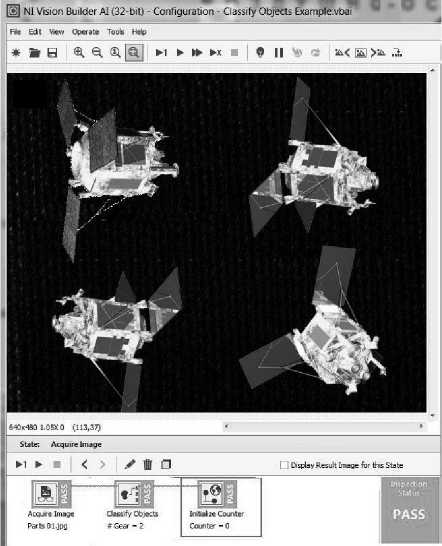
Рис. 9. Автоматизированная идентификации объектов КП в приложении Vision Builder AI: а – окно просмотра; б – скрипт инспекции; в – алгоритм инспекции
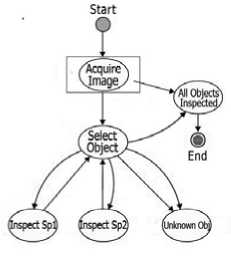
в
Разработанные алгоритмы, преобразованные в программное обеспечение, могут впоследствии быть использованы для непрерывного мониторинга ОЭС для реальных и модельных объектов КП на контроллерах реального времени.
Приложение Vision Builder AI позволяет проводить контрольные проверки и вариации модельной системы. Моделирование вариации системы контроля обеспечивает гарантию достаточной производительности вычислительной платформы в работе системы, даже если в режиме визуального контроля алгоритм на всех этапах работает корректно. Вариациями внешних условий являются уровень и характер освещения, размытость изображения, изменение углов визирования ЦК.
Заключение
В результате анализа модели спутникового космического пространства разработана структурная схема компактного макета, позволяющая исследовать работу ОЭС и проводить в условиях стенда разработку и тестирование программно-алгоритмического комплекса. Показано, что в условиях стенда необходимо подобрать параметры оптической
Махов В.Е., Борисов С.В., Широбоков В.В., Закутаев А.А. Макет для разработки... 85
системы и приемника, эквивалентные аппаратной части спутника, контролирующего объекты космического пространства.
Проведенный анализ показал возможность проводить масштабное изучение алгоритмов исследования объектов КП на базе компьютерных технологий фирмы National Instruments. Определена методика применения функций обработки изображений и измерения Было разработано программное обеспечение для роботизированного движения ОЭС в условиях стендовых испытаний.
Результаты исследований представлялись на IV Открытой выставке научно-технического творчества (НТТА) ВКА им. А.Ф. Можайского в 2016 г. (II место), Международном военно-техническом форуме «Армия-2018» (грамота). Результаты исследований обсуждались на межведомственном научно-техническом семинаре «Вопросы развития и испытаний информационных средств ракетно-космической обороны» (Санкт-Петербург, 16 мая 2018 г.), IV Всероссийской научно-практической конференции «Проблемы применения космических сил и средств в системе операций Вооруженных сил Российской Федерации» (24 октября 2018 г.).
Список литературы Макет для разработки программно-алгоритмического комплекса контроля объектов космического пространства
- Система контроля космического пространства // Военно-технический сборник «Бастион». Режим доступа: http://bastion-karpenko.ru/kosmos-kontrol
- Махов Е.М., Потапов А.И., Махов В.Е. Прикладная оптика: учеб. пособие. СПб.: СЗТУ, 2004. 348 с.
- Грузман И.С., Киричук В.С., Косых В.П. [и др.] Цифровая обработка изображений в информационных системах: учеб. пособие. Новосибирск: Изд-во НГТУ, 2000. 168 с.
- Джеррард А., Бёрч Дж.М. Введение в матричную оптику. М.: Мир, 1978. 341 с.
- Полупроводниковые формирователи сигналов изображения / под ред. П. Йесперса. М.: Мир, 1979. 570 с.
