Малогабаритная приёмопередающая система для дистанционного контроля полёта беспилотного объекта БКП совместно с ПУ-800

Автор: Безукладников Евгений Владимирович, Разумов Артем Николаевич, Ганиев Руслан Салихьянович, Горев Александр Викторович
Статья в выпуске: 3 (262), 2012 года.
Бесплатный доступ
Приведены описание и принцип работы малогабаритной приёмопередающей системы БКП совместно с ПУ-800 для дистанционного контроля полёта беспилотного объекта. Система применяется для контроля полёта изделий ОАО «ОКБ «Новатор».
Полетный контроль, беспилотный объект, приемопередающая система
Короткий адрес: https://sciup.org/147154815
IDR: 147154815 | УДК: 621.396.61
Compact two-way radio system for remote control of the unmanned flight facility OPF with PU-800
A description and working principle of compact two-way transmission system OPF with PU-800 for remote control of unmanned flying object has been given. The system is used for flight control products of OSC “EDB “Novator”.
Текст научной статьи Малогабаритная приёмопередающая система для дистанционного контроля полёта беспилотного объекта БКП совместно с ПУ-800
Два устройства, БКП и ПУ-800, представляют собой систему, позволяющую получать информацию о движении беспилотного объекта, его параметрах и свойствах, содержащуюся в «большой цифре». Эта информация даёт возможность наблюдать в реальном времени за поведением объекта на каждом этапе его работы и оценивать его действия. Система разработана коллективом авторов ОАО «ОКБ «Новатор».1
В рассматриваемой приёмопередающей системе БКП является передающим блоком контроля полёта. В результате конструктивной разработки БКП представляет собой единый моноблок, интегрированный с антенной системой (рис. 1). При разработке корпуса блока и выборе элементной базы учитывались следующие требования:
-
- форма изделия, на которое устанавливается устройство;
-
- компактность;
-
- устойчивость к перегрузкам, ударам и вибрации;
-
- надёжность работы в допустимом диапазоне климатических факторов.
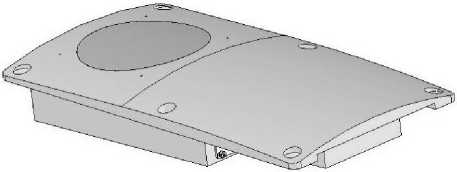
Рис. 1. Внешний вид БКП
Упрощённая функциональная схема БКП представлена на рис. 2.
От источника данных сигнал (электрические характеристики соответствуют ГОСТ 18977–79) поступает в микроконтроллер через преобразователь интерфейса, который предназначен для согласования физических уровней входного сигнала и микроконтроллера. Здесь к каждому пакету информации добавляется заголовок и порядковый
Е.В. Безукладников, А.Н. Разумов, Р.С. Ганиев, А.В. Горев
От источника данных
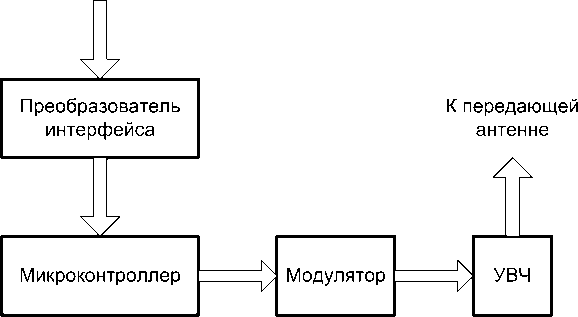
Рис. 2. Упрощённая функциональная схема БКП
номер пакета. Полученные данные из микроконтроллера поступают в модулятор, где формируется ЧМн-сигнал с подавленной несущей. Полученный сигнал усиливается и передающей антенной излучается в эфир.
Параметры радиосигнала следующие:
– частота несущей 869 МГц;
– девиация частоты 200 кГц;
– скорость данных 152,34 кБод.
Данные параметры позволяют не только обеспечить передачу всей полноты информации, но и оставляют некоторый резерв во времени передачи для дальнейших разработок и внедрений.
Приёмным устройством системы является ПУ-800. Оно состоит из приёмного (рис. 3) и интерфейсного модулей и приёмной антенны (рис. 4).
Упрощённая функциональная схема ПУ-800 представлена на рис. 5.
Радиосигнал улавливается приёмной антенной и поступает на демодулятор, который включа-
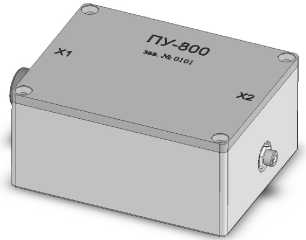
Рис. 3. Внешний вид приёмного модуля ПУ-800
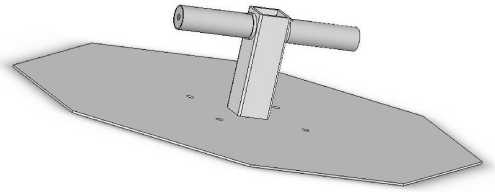
Рис. 4. Внешний вид приёмной антенны
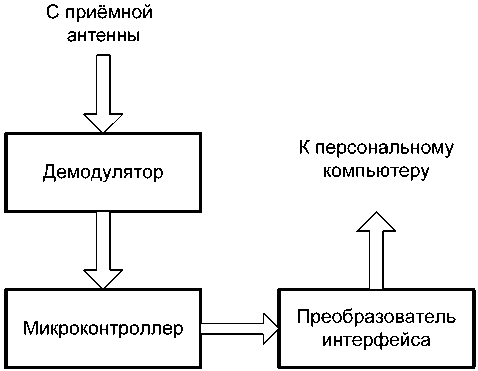
Рис. 5. Упрощённая функциональная схема ПУ-800
Малогабаритная приёмопередающая система для дистанционного контроля полёта беспилотного объекта БКП совместно с ПУ-800
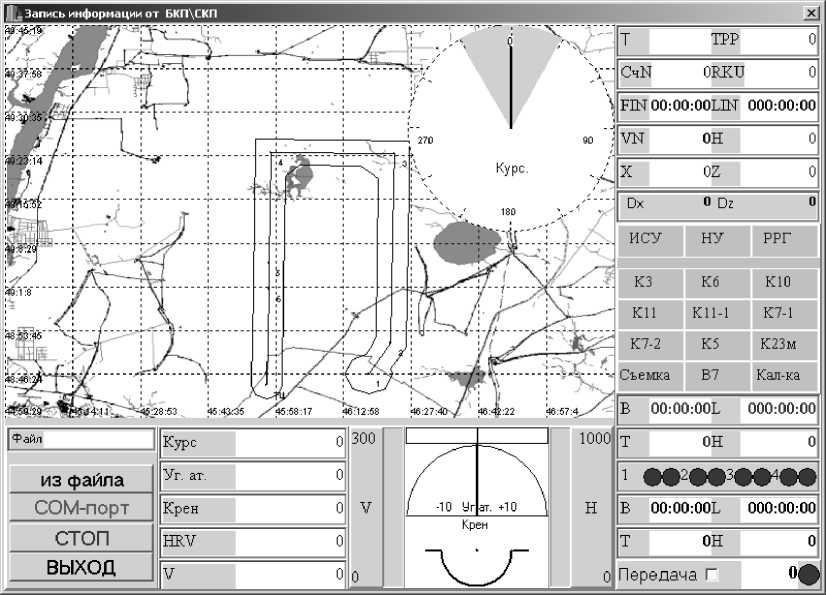
Рис. 6. Окно программы вывода информации от ПУ-800 на экран ПК
ет в себя также функции селектора сигнала. Далее полученная информация передаётся в микроконтроллер, откуда через преобразователь интерфейса на USB-порт компьютера.
Для обработки принятых данных было разра- ботано специализированное программное обеспечение, которое позволяет наблюдать за несколькими необходимыми параметрами в реальном времени работы БКП. Рабочее окно программы показано на рис. 6.
