Management of vehicular traffic system using artificial bee colony algorithm

Author: Risikat Folashade O. Adebiyi, Kabir Ahmad Abubilal, Abdoulie Momodou Sunkary Tekanyi, Busayo Hadir Adebiyi
Journal: International Journal of Image, Graphics and Signal Processing @ijigsp
Article in issue: 11 vol.9, 2017.
Free access
In this paper, an Adaptive Dynamic Scheduling Algorithm (ADSA) based on Artificial Bee Colony (ABC) was developed for vehicular traffic control. The developed model optimally scheduled green light timing in accordance with traffic condition in order to minimize the Average Waiting Time (AWT) at the cross intersection. A MATLAB based Graphic User Interface (GUI) traffic control simulator was developed. In order to demonstrate the effectiveness of the developed ADSA this paper was validated with the existing work in the literature. The result obtained for the AWT of the developed ADSA had a performance of 76.67%. While for vehicular queues cleared at the intersection the developed ADSA had a performance of 53.33%. The results clearly expressed that the developed ADSA method has been successful in minimizing the Average Waiting Time and vehicular queues at the intersection.
Average Waiting Time, Vehicular queue, Adaptive Dynamic Scheduling Algorithm, Artificial Bee colony, Queue Length and Congestion
Short address: https://sciup.org/15015913
IDR: 15015913 | DOI: 10.5815/ijigsp.2017.11.03
Text of the scientific article Management of vehicular traffic system using artificial bee colony algorithm
Traffic congestion is a crucial problem in large cities. To solve these congestion problems, we have to build new facilities and infrastructure, but at the same time make it smart. However, the drawback to creating new road infrastructure apart from costs is that it still makes the surroundings more congested. This has necessitated the introduction of an intelligent control method which has proven to be more superior to the conventional signal control methods. To alleviate traffic congestion in urban areas, the concept of Intelligent Transportation Systems (ITS) has been widely accepted in developed countries. The ITS is a highly promising system for providing key solutions to current road congestion problem. Therefore, many countries have been able to manage their existing transportation systems by introducing ITS to improve mobility, safety and traffic flow in order to reduce the demand for vehicle use. We apply an Artificial Bee Colony based Adaptive Dynamic Scheduling Algorithm in the traffic control system to provide intelligent green interval responses based on dynamic traffic load inputs, thereby overcoming the inefficiencies of the conventional traffic controllers. The features inherent in Artificial Bee Colony that play a critical role in making it the best choice for traffic control management and analysis is the ability to aid easy modification by introducing model parameters that result in a better performance which uses few parameters and has a good convergence.
Our preliminary review of the literature indicates that Artificial Bee Colony algorithm has not been tested on any traffic control intersection. We have, therefore, attempted to implement this algorithm and study its effects on this problem.
This paper is organized as follows: Section I is an introduction to the paper discusses traffic congestions. Section II talks about the related works that exist in the literature. Intelligent Transportation System is discussed in section III. Section IV consists of Adaptive Traffic Control System while Section V discusses the results. Then, Section VI concludes the work.
-
II. Related Works
This section gives a brief of review of various approaches that have been employed to solve problems associated with adaptive traffic control using algorithms.
In the work of Mittal and Singh [1] , a model based image mosaicking technique was designed. The algorithm adopted the use of inter- arrival and interdeparture times to simulate the left of vehicles. The model provided good and satisfactory results of the Average Waiting Time.
A distributed algorithm for adaptive traffic light control which decides in a dynamic fashion, the green light sequences by selecting movements comprising each phase and its duration was developed by Faye et., al [2] . The system model made use of sensors organized into four hierarchical layers with several communication paths. To ensure that the proposed method is plausible, simulations were conducted with positive results for the minimization of the average waiting time.
Younes and Boukerche [3] introduced a dynamic traffic light scheduling algorithm. This algorithm schedules the competing flows at any signalized intersection, to allow the more dense traffic flows to cross the intersection first. The assigned time for each phase is set based on the traffic distribution over its traffic flows. This algorithm is enhanced to handle the appearance of any emergency vehicle.
Araghi et. al [4] presented a dynamic traffic light phase plan protocol for single-isolated intersections. The developed controlling method was compared with four other methods and showed a good performance in terms of reducing the average and maximum queue lengths, optimizing the given green time amount as needed, and increased the intersection’s throughput (increased the given green time utilization).
In the work of Collota et. al [5] a novel approach to dynamically manage the traffic lights cycles and phases in an isolated intersection. The target of the work is a system that, compared with previous solutions, offers improved performance which is flexible and can be implemented on off-the-shelf components. The proposed solution is a traffic light dynamic control system that combines an IEEE 802.15.4 Wireless Sensor Network (WSN) for real-time traffic monitoring with multiple fuzzy logic controllers, one for each phase, that work in parallel.
Garg and Kaushal [6] proposed a novel system that combines several technologies i.e. fuzzy logic and WSN in an original way so as to obtain a lightweight but effective solution. The fuzzy logic controller addresses vehicles turning movements and dynamically manages both the phase and the green time of traffic lights. Simulation results demonstrate that the multi-controller approach here proposed outperforms related works in terms of reduction of the vehicle waiting times in the queues, especially under heavy traffic.
Bratu and Gretu [7] in their paper described an intelligent and complex application that helps to clear traffic and to improve security while having a fast response of the emergency services. By making use of embedded and internet we can develop an application to clear the traffic while coming in the path.
Jovanovic et al., [8] The paper described a new method of optimizing traffic signal settings. The areawide urban traffic control system developed in the paper was based on the Bee Colony Optimization (BCO) technique. The BCO method is based on the principles of the collective intelligence applied by the honey bees during the nectar collecting process. The optimal (or near-optimal) values of cycle length, offsets, and splits were discovered by minimizing the total travel time of all network users travelling through signalized intersections. The set of numerical experiments was performed on well-known traffic benchmark network. The results obtained by the BCO approach are compared with the results found by Simulated Annealing (SA). It has been shown that the suggested BCO approach outperformed the SA.
Lai et al., [9] developed an Adaptive Neural-Fuzzy Inference System (ANFIS) traffic signals controller for multilane-isolated four approaches intersections in order to ease traffic congestions at traffic intersections. The sample data was generated based on fuzzy rules and can be analysed using a tree diagram. This controller was simulated on multilane-isolated traffic intersection model developed using M/M/1 queuing theory and its performance in terms of average waiting time, queue length and delay time are compared with traditional controllers and fuzzy controller. Simulation result shows that the average waiting time, queue length, and delay time of ANFIS traffic signal controller are the lowest as compared to the other three controllers.
-
III. Intelligent Transportation Systems (ITS)
Intelligent Transportation System (ITS) is a system in which information and communication technologies are applied in road transport, including infrastructure, vehicles and users, and in traffic management and mobility management, as well as for interfaces with other modes of transportation. Generally, Intelligent Transportation Systems (ITS) are classified into five systems according to their functions as follows [10] :
-
a) Advanced traffic light management System (ATMS) b) Advanced traveller information system, (ATIS) c) ITS –enabled transportation pricing systems, (ITS-
- ETPS)
-
d) Advanced public transportation system, (APTS) e) Vehicle to infrastructure integration (VII) and
Vehicle to vehicle (V2V) integration.
The various classes of ITS systems such as the Advanced traveller information system, [11] (ATIS) allows road users to access real time information such as in the car, at home, in the office or outdoor by choosing transportation modes, travel trips and routes. The system mainly includes changeable message signs, Highway
Advisory Radio, Global Positioning System Road side weather information systems and so on [12] .
The ITS –enabled transportation pricing systems, (ITS-ETPS) employs technologies to the road network management that helps drivers to automatically pay tolls electronically via a Dedicated Short Range Communications (DSRC-enabled onboard device) or tag placed on the windshield. Another ITS-enabled approach is Vehicles Miles Travelled (VMT) that charges motorists based on miles driven [12] . With this application ITS finds a central role in financing most countries transportation systems [10] .
The advanced public transportation system, (APTS) applies the combined technologies of ATMS, ATIS and ITS-ETPS in public transportation in order to improve the quality of service, increase efficiency and the number of people who take public transportation [10] .The system mainly includes the automatic vehicle location (AVL) monitoring, computer scheduling and e–tickets [12] .
While Vehicle to infrastructure integration (VII) and Vehicle to vehicle (V2V) integration. Uses the technology of Intelligent Speed Adaptation (ISA) which is aimed to assist drivers in keeping with speed limits. By correlating information about the position of the vehicle with a digital speed limit map thus enabling it to recognize if it has passed posted speed limit (Ezell, 2010). Also, Cooperative Intersection Collision Avoidance systems (CICAS) play a role in V2V integration systems [10] .
However, the ATMS is the area in which our research scope addressed the problem of vehicular Average Waiting Time (AWT). The ATMS is usually employed to detect traffic situations, transmits them to a control centre via a communication network, and then develops traffic control strategies by combining all kinds of traffic information. The system makes use of base stations to carry out traffic control and transmits the information to drivers and concerned departments [10] . ATMS includes ITS applications that focus on traffic control devices such as ramp metering, adaptive traffic signal control, traffic operation centres (TOC) and high occupancy vehicle control and so on [12] .
-
IV. Adaptive Traffic Control System
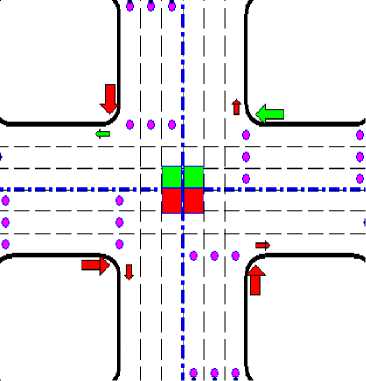
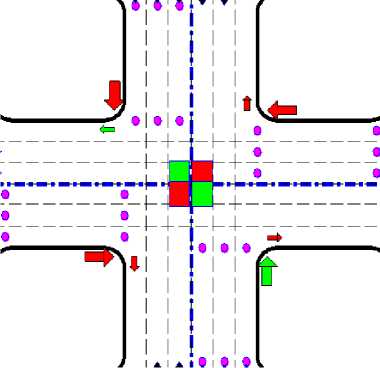
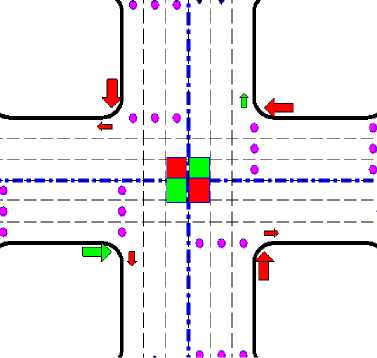
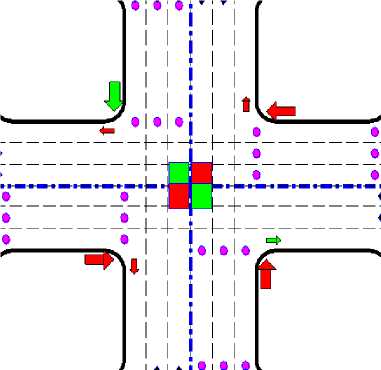
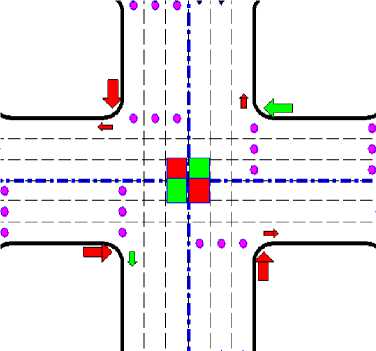
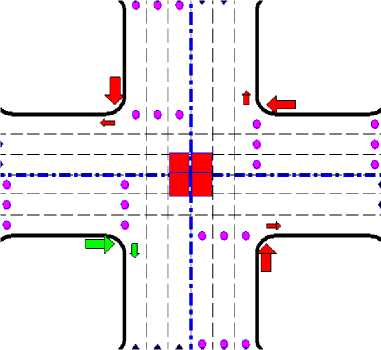
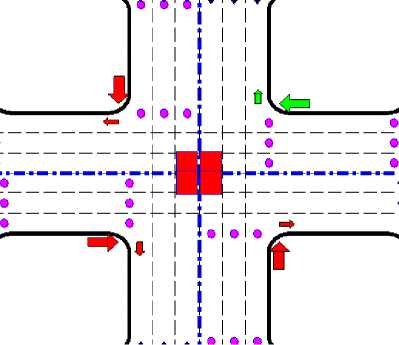
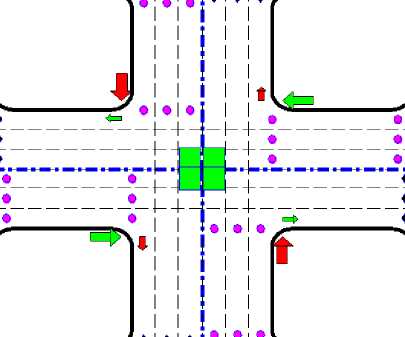
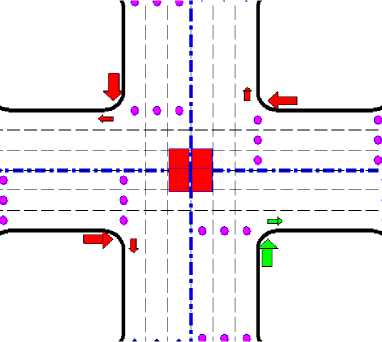
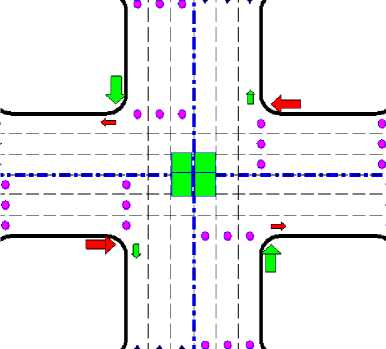
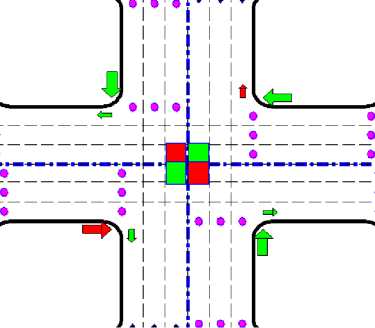
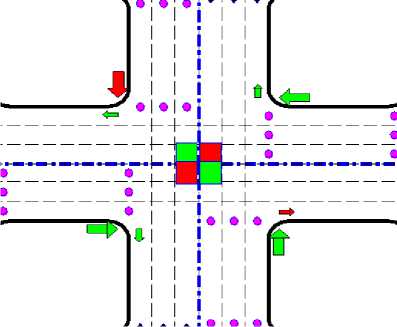
The Artificial Bee Colony (ABC) algorithm is a population-based metaheuristic optimization which was inspired by the foraging behaviour of the honey bee swarm. The ABC colony is divided into employed bees and onlooker bees [13]. In ABC algorithm, the position of a food source represents a possible solution to the optimization problem and the nectar amount of a food source corresponds to the quality (fitness) of the associated solution [14]. In this paper, ABC algorithm is employed to determine the appropriate green light duration for each of the roads forming the intersection. A new structure of traffic control system was described using Artificial Bee Colony based Adaptive Dynamic Scheduling Algorithm. The methodology used a Vehicular Traffic Control System model in order to ease implementation of traffic scenario at a cross –intersection as described by Fig 1 while decoding. The various VTCS codes generated by the Cross road- intersections are demonstrated by Fig 2.
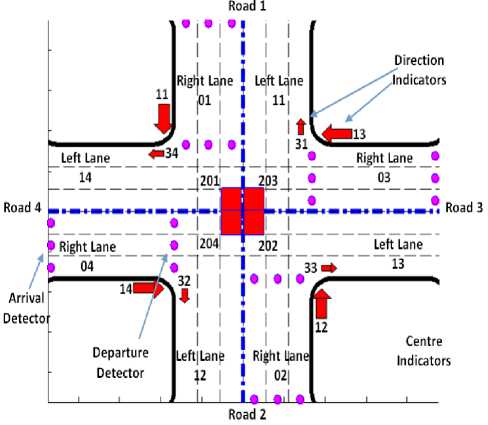
Fig.1. Cross – Road Intersection as Generated by the Developed Simulator
In the developed model, each lane is represented by a double digit array/number as further described in the following:
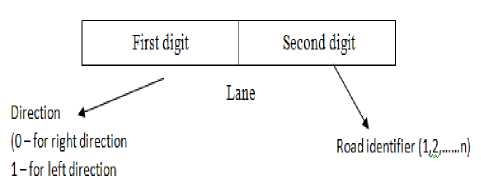
Fig.2. Coding a Lane at the Intersection
For example, 01 is used to represent the right lane of road 1, while 14 denotes the left lane of road 4. There is no particular manner in which the roads must be numbered, but what matters is that once the roads are numbered, the order remains the same throughout the simulation.
In our proposed algorithm, the following assumptions were made:
-
1. Each of the road forming the intersection has two lanes that are wide enough to support three separate vehicle queue
-
2. Vehicles are allowed to queue-up on each lane according to their intended motion direction decision, i.e.
-
a) Left decision → Left part of the lane
-
b) Right decision → right part of the lane
-
c) Straight decision → centre of the lane
-
3. Delay is not caused by service vehicles crossing the intersection in non-conflicting manner i.e. vehicles do not manoeuvre their way while at the intersection.
-
4. The sensors can detect vehicles on each of the lanes regardless of their speed and position i.e. vehicles are accurately counted.
Using a VTCS equation for an objective function that has been minimized at any instant in time
n
N = XNoi + Ait - git (1)
i = 1
For the problem of function optimization, where f is the function to be minimized, ABC computes the fitness of a candidate solution x using (2) [15] .
Since x i representing the ith bee, x i is a row of np is a set of random real numbers taken in the range (0,1), tg can be redefined as follows.
Let:
g ( xi ) =
np
X X k=1
np
By substituting g ( X ;) , k into equation (5) yields;
fitnesS( xt)
1 + f (x/
1 + 1 f ( X )
f (x,)2 0
otherwise
f (xi ) =
np nP - ktgmax X xi k=1
np
kt 7 x.
gmax i k=1
The conventional objective function of ABC algorithm shown in equation (2) that, it best suits minimization problem. Meaning that the objective function will have a maximum value of unity. For values of f ( x x) <0, the objective function becomes greater than zero.
Thus,
Fobj = N ( g ) (3)
1
Fob1 = 1 + f (x,) (4)
By considering the average arrival rate, λ and the average departure rate, µ of the intersection
The green light timing t g , the minimized equation in (2) yields:
N
-
1 - X( N OI + Atg - gtg )
f(x)=—-------------- (5)
X ( N oI + A i t g - gi g )
i = 1
In this work, t limits the value of t . Let t be gmax g g a function of the population of bees (X,) and
m
kX(z/- g)
i = 1
Therefore: t g = t g гах g ( x )
This equation (6) represents the ABC based VTCS objective function.
The Adaptive Dynamic Scheduling algorithm runs real-time traffic light regulation of phase sequence and green time duration based on data gathered by the WSN on the road [16] . The phase sequence is determined by using queue length for each input variable or flow or by sorting them in descending order of priority [17]. The phase sequence assigns priority to each phase equal to the maximum queue length of that phase. The calculation of green time is then considered.
-
V. Results and Discussion
In this section, the simulation was done by creating a highly graphical application as in Fig 3. In order to ease the development of the vehicular traffic congestion control algorithm, a MATLAB based Graphic User Interface (GUI) fitted with several buttons as shown in Fig 3 was developed.
These buttons are further explained using Table 1
Table 1. Functional Buttons of the developed VTCS Simulator
|
BUTTON NAME |
Description |
|
START |
Run the ADSA and generate the relevant graphs |
|
RESET |
Resets the texts displayed in all the text boxes |
|
VIEW |
Generate the green light configuration for a selected traffic phase |
|
SIMULATE |
Demonstrate all the possible traffic movement across the intersection |
|
SIMULATE TLC |
Simulates other possible road intersection e.g 3- Road, 5 -road, 6 road e.t.c |
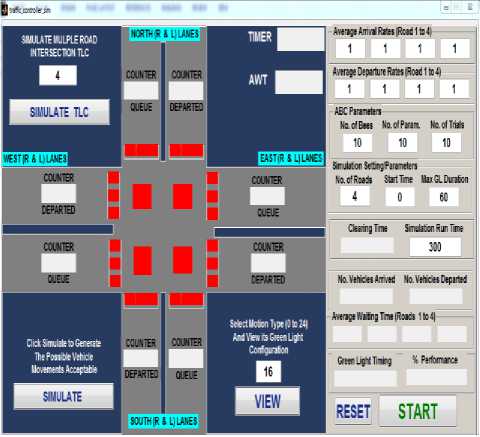
Fig.3. Graphic User Interface of the Developed Simulator
(1) VTCS Code: 14 204 202 33 04 13
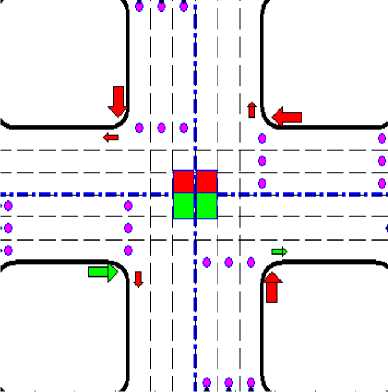
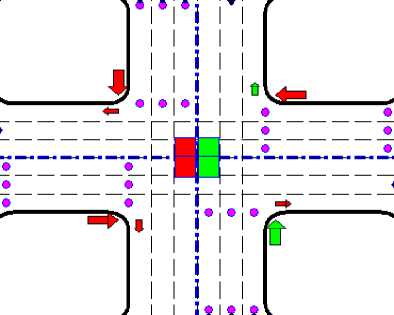
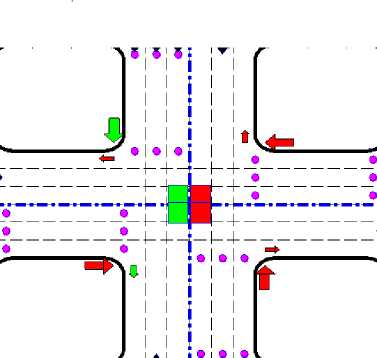
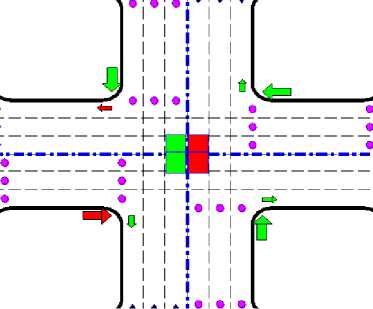
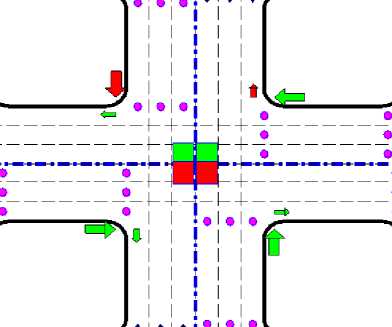
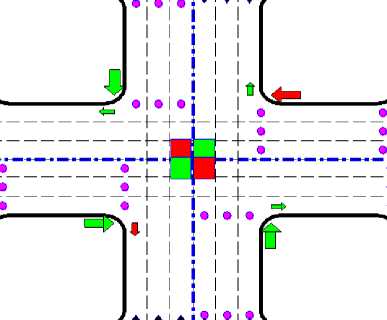
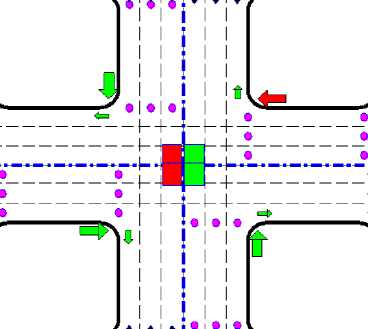
The GUI developed generated Vehicular Traffic Control System (VTCS) model for 22 possible phases as shown in Fig 5.
In order to, ease decoding the various traffic phases generated in Fig 5, it is good to decode the VTCS code using Fig 4. A VTCS Code such as 11 201 202 33 0113 representing traffic phase (8) in the paper can be split into a Control Signal code and a Motion Decision Variable. These are further expressed as values representing either a Start, Center or End Indicator (s) for any direction of the cross-intersection that has a green light timing. This forms the basis in which all the 22 phases were easily generated and decoded.
(2) VTCS Code: 13 203 201 34 13 31 0314 0311
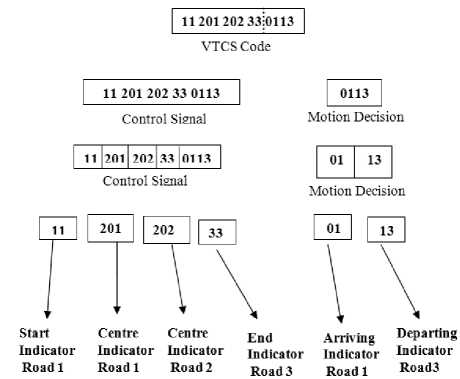
Fig.4. Procedure for decoding a VTCS Code
(3) VTCS Code: 12 202 203 31 0211
(4) VTCS Code: 11 201 204 32 0112
(7) (VTCS Code:12 202 201 34 0214
(5) VTCS Code: 14 204 203 31 0411
(8) VTCS Code: 11 201 202 33 0113
I A I A 1 • I I •
(6) VTCS Code: 11 203 204 32 0312
(9) VTCS Code: 14 32 0412
(10) VTCS Code: 13 31 0311
(11) VTCS Code: 12 33 0213
(13) VTCS Code: 13 203 201 34 14 204 202 330413 0314
(14) VTCS Code: 11 201 204 32 12 202 203 31 0212 0111
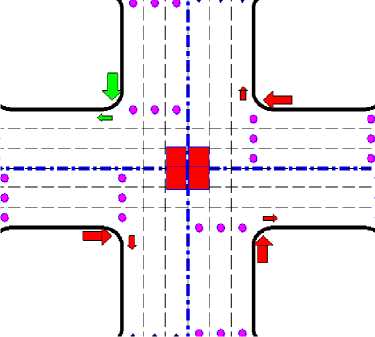
(12) VTCS Code: 11 34 0114
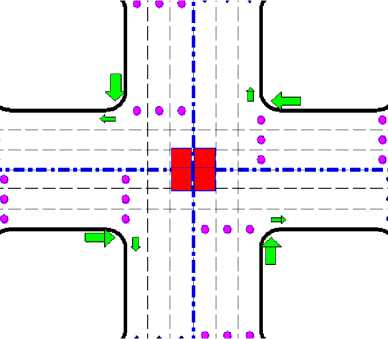
(15) VTCS Code: 11 34 13 31 14 32 12 33 0114 0311 0412 0213
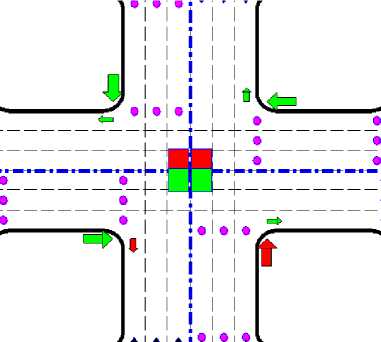
(19) VTCS Code: 11 201 204 32 13 31 12 33 0112 0311 0213)
(16) VTCS Code: 11 34 13 31 14 33 0114 0311 0413
(20) VTCS Code: 14 204 203 31 11 34 12 33 0411 0114 0213
-
(17) VTCS Code: 13 203 201 34 14 33 14 32 12 33 0314 0413 0213 0412
(21) VTCS Code: 13 203 204 32 11 34 12 33 0311 0114 0213
-
(18) VTCS Code: 12 202 203 31 12 33 11 34 14 32 0211 0114 0412 0213
(22) VTCS Code: 12 202 201 34 14 32 13 31 0214 0412 0311
Fig.5. Traffic Phases
-
A. Validation
In order to demonstrate the validity of the developed ADSA for vehicular traffic control, the scenario simulated in the work of [16] was replicated using the developed simulator. The results of AWT and Traffic Queue were generated and plotted against those obtained in the work of [16]. Fig 6 and 7 shows a comparison of AWT and Traffic Queue respectively. The conventional Fixed Time traffic light controllers are characterized by their constant AWT regardless of the traffic condition. This can easily be observed from the ‘red' colour shown in Fig 6. The Fuzzy logic approach presented in the work of [16], yielded an AWT represented by the ‘green’ colour shown in Fig 6. On the other hand, the developed ABC based Adaptive Dynamic Scheduling Algorithm (ADSA) yielded the ‘blue' colour. The wide variation observed in the AWT of the ADSA is due to the large dependency of the developed ADSA approach to traffic condition. The scenario simulated made use of thirty points (30) on the curve. Out of the 30 scenarios for AWT, the developed ADSA performs better than fuzzy on 23 points (76.67%), while fuzzy approach performs better on 5 points (16.67%). On the remaining 2 points (6.67%) their results are similar. The overall performance shows that the developed ADSA is better than the fuzzy-based approach.
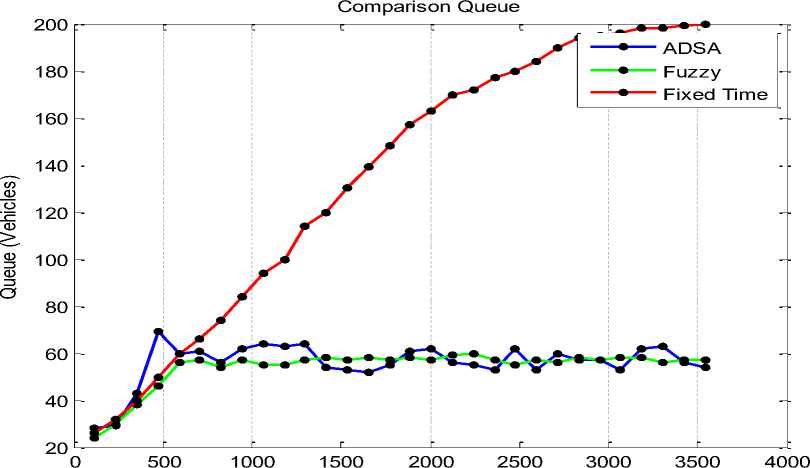
The continuous increase in queue length common to Fixed-Time controllers (as represented by the ‘red’ colour shown in Fig 7) is usually mitigated by using variable-time controllers. From Fig 7, it could be observed that both the ADSA and fuzzy based controllers have a relatively fixed queue length as compared to the Fixed-Time controllers. This may be associated with the proportionate green light time scheduled by the variabletime controllers. The scenario simulated made use of thirty points (30) on the curve. Out of the 30 scenarios for traffic queues, the developed ADSA performs better than fuzzy on 16 points (53.33%), while fuzzy method performs better on 7 points (23.33%). On the remaining 7 points (23.33%) their results are similar. The overall performance shows that the developed ADSA is better than the fuzzy-based approach.
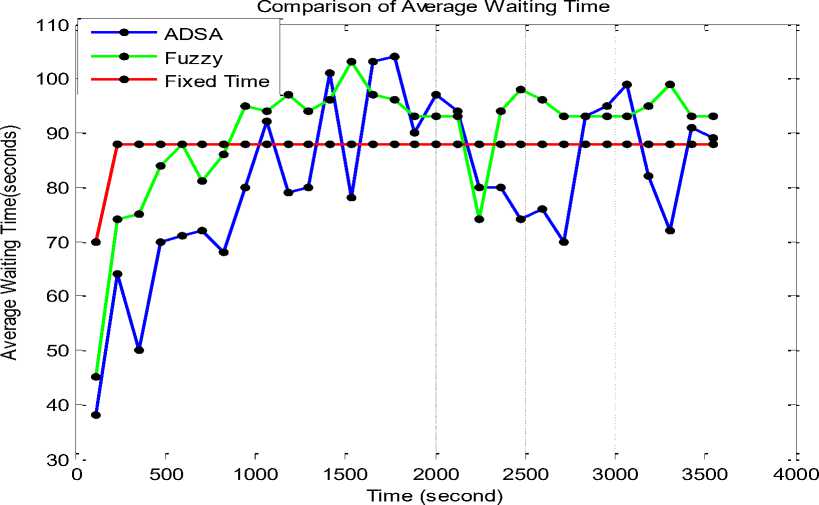
Fig.6. Comparison of AWT for Fuzzy, Fixed-Time, and ADSA Based Traffic Controllers
Time (second)
Fig.7. Comparison of Queue for Fuzzy, Fixed-Time, and ADSA Based Traffic Controllers
-
VI. Conclusion
In this work, the conventional ABC algorithm has been improved in order to suit application in vehicular traffic control (VTC). An ABC based Adaptive Dynamic Scheduling Algorithm (ADSA) for VTC has been developed. A mathematical model and control strategy for a cross -road intersection has been developed to suit application in traffic green light controller design. A VTC simulator was developed using MATLAB GUI development environment. In order to further demonstrate the validity and the effectiveness of the developed simulator, a comparison between the two approaches (Fixed-Time and fuzzy - based approach) presented in the work of [16] and the developed ADSA showed that the developed ADSA outperformed the fuzzy–based approach with 76.67% performance for AWT and 53.33% for queues. The results clearly expressed that the developed ADSA method has been successful to outperform the fuzzy-based approach.
References Management of vehicular traffic system using artificial bee colony algorithm
- Mittal, P.K. and Y. Singh, Analysis and designing of proposed intelligent road traffic congestion control system with image mosaicking technique. International Journal of IT, Engineering and Applied Science Research (IJIEASR) Vol, 2013. 2: p. 27-31.
- Faye, S., C. Chaudet, and I. Demeure. A distributed algorithm for adaptive traffic lights control. in Intelligent Transportation Systems (ITSC), 2012 15th International IEEE Conference on. 2012. IEEE.
- Younes, M.B. and A. Boukerche, An efficient dynamic traffic light scheduling algorithm considering emergency vehicles for intelligent transportation systems. Wireless Networks, 2017: p. 1-13.
- Araghi, S., A. Khosravi, and D. Creighton, Intelligent cuckoo search optimized traffic signal controllers for the multi-intersection network. Expert Systems with Applications, 2015. 42(9): p. 4422-4431.
- Collotta, M., L.L. Bello, and G. Pau, A novel approach for dynamic traffic lights management based on Wireless Sensor Networks and multiple fuzzy logic controllers. Expert Systems with Applications, 2015. 42(13): p. 5403-5415.
- Garg, H. and E.G. Kaushal, Traffic Lights Control System for Indian Cities Using WSN and Fuzzy Control. Traffic, 2017. 4(07).
- Bratu, A. and M. Creţu, Real-Time Traffic Management for Emergency Services. Bulletin of the Transilvania University of Brasov. Engineering Sciences. Series I, 2017. 10(1).
- Jovanović, A., M. Nikolić, and D. Teodorović, Area-wide urban traffic control: A Bee Colony Optimization approach. Transportation Research Part C: Emerging Technologies, 2017. 77: p. 329-350.
- Lai, G., et al., Controlling Traffic Flow in Multilane-Isolated Intersection Using ANFIS Approach Techniques. Journal of Engineering Science and Technology, 2015. 10(8): p. 1009-1034.
- Samadi, S., et al., Performance evaluation of intelligent adaptive traffic control systems: A case study. Journal of transportation technologies, 2012. 2(03): p. 248.
- Dhole, R.N., et al. Smart traffic signal using ultrasonic sensor. in Green Computing Communication and Electrical Engineering (ICGCCEE), 2014 International Conference on. 2014. IEEE.
- Ezell, S., Explaining International IT application leadership: Intelligent transportation systems. 2010.
- Karaboga, D., An idea based on honey bee swarm for numerical optimization. 2005, Technical report-tr06, Erciyes university, engineering faculty, computer engineering department.
- Karaboga, D., et al., A comprehensive survey: artificial bee colony (ABC) algorithm and applications. Artificial Intelligence Review, 2014. 42(1): p. 21-57.
- Priti Bansal, S.S. and Nitish Mittal, A Hybrid Artificial Bee Colony and Harmony Search Algorithm to Generate Covering Arrays for Pair-wise Testing. International Journal of Intelligent Systems and Applications (IJISA), 2017. 9(8): p. 59-70.
- Erwan, E.P., W. Oyas, and S. Selo, Design and Simulation of Adaptive Traffic Light Controller Using Fuzzy Logic Control Sugeno Method. International Journal of Scientific and Research Publications, 2015. 5(4): p. 6.
