Манипуляторы с управляемым изгибом

Автор: Мингазова И.Н.
Журнал: Форум молодых ученых @forum-nauka
Статья в выпуске: 7 (23), 2018 года.
Бесплатный доступ
В статье рассматриваются манипуляторы с управляемым изгибом, их конфигурации, принципы работы и актуальность их использования.
Гибкий манипулятор, управляемый изгиб, инспекционный манипулятор
Короткий адрес: https://sciup.org/140283911
IDR: 140283911
Manipulators with controlled bending
The article considers manipulators with controlled bending, their configurations, principles of operation and relevance of their use.
Текст научной статьи Манипуляторы с управляемым изгибом
Каждый день человечество проявляет все новые и новые требования к механизмам и машинам. Это обуславливается стремлением человека повысить эффективность труда, решить задачи по обеспечению качества и точности выполнения работ. Немаловажной причиной также является необходимость работы в агрессивных средах, там, где нахождение человека опасно для его жизни.
Всем этим требованиям удовлетворяют простые по конструкции и очень практичные системы - роботы и манипуляторы. Конструкция манипулятора, как правило, определяет все функциональные возможности промышленных роботов: его манипулятивность, рабочую зону, нагрузочную способность, коэффициент сервиса и т.д. Жесткость звена манипулятора так же немаловажна. По этому признаку можно выделить три больших класса:
-
- с жёсткими звеньями;
-
- с использованием звеньев с контролируемой деформацией;
-
- с управляемым изгибом.
В данный момент проявляется острая потребность в доставке рабочего органа манипулятора в ограниченные, труднодоступные полости сложных механизмов. Эту потребность целиком и полностью удовлетворяют манипуляторы с управляемым изгибом. В них за счет изменения пространственной конфигурации отдельных звеньев относительно основного привода осуществляется движение рабочего органа в необходимом направлении. Для функционирования манипуляторов с управляемым изгибом требуется меньшее количество приводов по сравнению с манипуляторами с жесткими звеньями и с использованием звеньев с контролируемой деформацией, что является их несомненным преимуществом. Другой особенностью манипуляторов данного типа является способность обхватывать объект для его удержания, что позволяет исключить применение схватов.
Однако их малая жесткость, а в следствии невозможность работы с формообразующим инструментом, является недостатком. Но если рассматривать гибкие манипуляторы как средство доставки различных инструментов обработки (например, покраски) и бесконтактного контроля в труднодоступные внутренние полости агрегатов со сложной пространственной формой каналов, то они идеально подходят для решения подобных задач.
Все традиционные манипуляторы являются схемами с жесткой кинематикой: жесткие неразъемные звенья, соединенные в основном кинематическими парами 5 класса, таким образом, достигается жесткость манипулятора. Другим подходом к построению манипуляционной системы и способу изменения ее конфигурации является то, что звенья системы выполняют заведомо не жесткими, а упругими; управляющее воздействие определяет нагружение звена, преобладающее над всеми остальными видами нагрузок, передаваемых звеном, и соответственно его деформацию, за счет которой меняется конфигурация манипуляционной системы .
Примером манипуляционной системы с контролируемой деформацией может служить манипулятор на основе использования трубок Бурдона (рисунок 1). Форма двух последовательно соединенных трубок Бурдона 1 и 2 зависит от подаваемого в них давления. Изменение формы статического равновесия всей системы позволяет менять положение рабочего органа 3 в пределах некоторой области A . Каждая из трубок Бурдона представляет собой упругое звено манипуляционной системы, через изменяемые давление P и P реализуются управляющие воздействия, а деформация трубок, соответствующие положениям статического равновесия, определяют конфигурации манипуляционной системы.
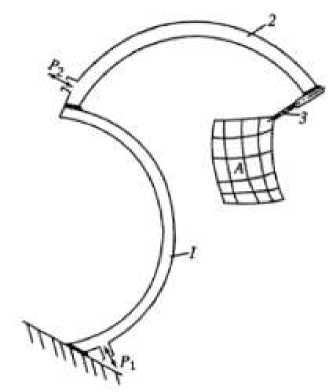
Рисунок 1– Схема манипуляционной системы на основе трубки Бурдона
Следующая распространенная конструкция манипулятора, реализующего принцип управления изгибом путем изменения давления воздуха в полостях деформируемых элементов, которые разделены на два и более независимых сегмента, создана инженерами фирмы Festo и позиционируется ими как бионический манипулятор, повторяющий функции хобота слона. Festo bionic handling assistant – бионический манипулятор Фесто представлен на рисунке 2.
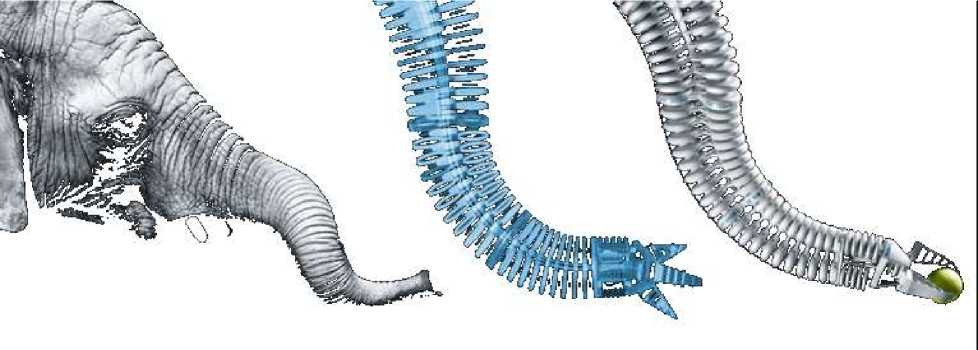
Рисунок 2 - Festo bionic handling assistant
Манипулятор состоит из ультралегких сегментов пластичного материала. Каждый сегмент имеет камеру, наличие которой превращает данный сегмент в независимый пневматический мускул. Соединение таких сегментов разного размера в определенной геометрической последовательности позволило получить манипулятор, обладающий высокой подвижностью, большими значениями коэффициента сервиса. При подаче сжатого воздуха в разные камеры манипулятора получается соответствующее перемещение в трехмерном пространстве.
Ещё один принцип построения манипуляторов с управляемым изгибом основан на применении твердотельных элементов со сферической поверхностью. Подобный гибкий двухзвенный манипулятор был разработан фирмой Spine Inc. в начале 80-х годов прошлого века. Робот Spine -вращающийся робот представлен на рисунке 3. Около 25 образцов таких манипуляторов эксплуатировались на предприятиях Volvo, Volkswagen и JCB на лакокрасочных производствах. Манипулятор имел 7 степеней подвижности: две в плече, две в предплечье и три кистевые.
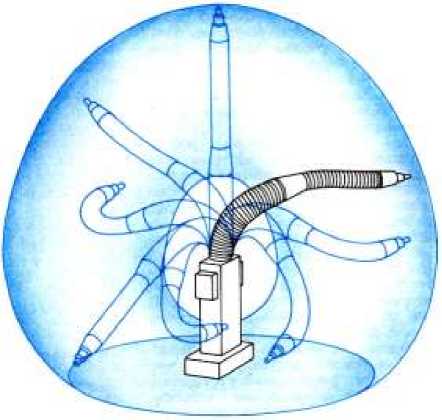
Рисунок 3 - Робот Spine
Эта система состоит из основания и манипулятора, который разделен на нижнюю и верхнюю секции, причем эти секции могут двигаться независимо друг от друга. Такой гибкий манипулятор состоит из множества чечевицеобразных дисков из нержавеющей стали, которые соединены между собой двумя парами тросов, обеспечивающих натяжение. Тросы соединены с поршнями гидравлических цилиндров, которые, создавая натяжение, вызывают перемещения манипулятора. Специальные датчики передают на систему управления информацию о положении манипулятора и его кисти.
Роботизированная зарядка Solid Metal Snake электромобилей Tesla представлена на рисунке 4. Гибкость робота обеспечивает ему возможность подключения к гнездам зарядки, расположенным на любой высоте. Кроме того, он способен находить гнездо без участия человека, и самостоятельно определять уровень зарядки аккумуляторов.

Рисунок 4 - Робот Solid Metal Snake, Tesla Motors
Таким образом, можно отметить следующее: конфигурации и принципы построения манипуляторов на базе жёстких звеньев успешно решают множество задач в различных отраслях машиностроения. Манипуляторы на базе звеньев с управляемым изгибом специфичны и могут использоваться там, где применение традиционных промышленных манипуляторов затруднено, а зачастую и вовсе невозможно. Это направление в развитии робототехники достаточно актуально и требует разработки новых конструкторских решений, применения новых материалов, последних достижений микроэлектроники и вычислительной техники.
Список литературы Манипуляторы с управляемым изгибом
- Богданов Д.Р., Даринцев О.В. Конструктивные особенности манипуляторов с управляемым изгибом // Современные проблемы науки и образования: электронный научный журнал. - 2013. - №6. URL: http://www.science-education.ru/ru/article/view?id=11784
- Твердая металлическая змея /Solid metal snake. URL: http://www.businessinsider.com/tesla-model-s-homemade-charger-looks-like-metal-snake-2016-6
- Фесто - бионический помощник по обработке /Festo bionic handling assistant. URL: https://www.festo.com/group/ru/cms/10241.htm
