Математическая модель, алгоритм формирования вектора состояния и техническая реализация многокоординатного задающего органа внутрикамерных манипуляторов

Автор: Носиков Максим Владимирович, Войнов Игорь Вячеславович, Морозов Борис Александрович
Рубрика: Управление в технических системах
Статья в выпуске: 1 т.23, 2023 года.
Бесплатный доступ
Цель исследования: разработка математической модели и алгоритма формирования вектора состояния многокоординатного задающего органа дельта-типа для осуществления управления манипуляторами с человеком-оператором в контуре управления. Методы исследования. В работе рассмотрены существующие методы дистанционного управления многостепенными манипуляторами (специального назначения) с человеком-оператором в контуре управления, выявлены достоинства и недостатки существующих решений. При этом поставлена задача синтеза задающего органа для обеспечения управления манипулятором в пространстве одной рукой. На сегодняшний день на предприятиях атомной промышленности широко применяются герметичные камеры, в которых устанавливаются электромеханические манипуляторы копирующего типа. В состав таких манипуляторов входят исполнительные органы, устанавливаемые непосредственно в герметичной камере, и их кинематически подобные задающие органы. Оператор вручную перемещает задающий орган, траектория движения звеньев которого повторяется внутри камеры исполнительным органом манипулятора. С учетом физического и морального устаревания данного оборудования требуется введение современных подходов к построению человеко-машинных интерфейсов. В работе предложена математическая модель вычисления вектора состояния (линейных и угловых координат) задающего органа дельта-типа по измеряемой информации об относительном угловом положении в его вращательных кинематических парах. Результаты исследования. Синтезирован алгоритм вычисления координат рукоятки задающего органа на основе априорной информации о взаимном расположении элементов дельта-механизма. С учетом расположенных на рукоятке задающего органа дополнительных дискретных и пропорциональных каналов управления предложенные алгоритм и его практическая реализация позволяют вводить дополнительные режимы управления манипулятором. Заключение. К основным результатам работы относится математическая модель и алгоритм формирования вектора состояния задающего органа дельта-типа, позволяющего оператору осуществлять формирование векторов линейной и угловой скорости движения схвата многостепенного манипулятора одной рукой. Техническая реализация задающего органа и алгоритма, а также опытная эксплуатация задающего органа в составе манипуляционной системы показали высокую эффективность предложенных решений.
Многостепенной манипулятор, герметичная камера, задающий орган, джойстик
Короткий адрес: https://sciup.org/147239457
IDR: 147239457 | УДК: 007.51:007.52:681.516:681.518 | DOI: 10.14529/ctcr230102
Mathematical model, state vector calculation algorithm and realization of multi-axes control stick for intrachamber manipulators
The purpose of the study is a development of a mathematical model and an algorithm for the calculation of the state vector of a multi-axes delta-type control joystick for moving special purposes arm manipulators by a human operator in the loop. Research methods. The paper considers the existing methods of remote control of intrachambers special purpose arm manipulators with a human operator in the control loop, identifies the advantages and disadvantages of existing solutions. The task of synthesizing the optimal control stick to ensure driving of the manipulator in 3D-space was set. Today, nuclear industry enterprises widely use hermetic chambers in which copy-type electromechanical manipulators are installed. The manipulation system includes an arm manipulator installed directly in a sealed chamber, and its kinematically similar control arm. The operator manually moves the control arm, the trajectory of which is repeated inside the chamber by the arm manipulator. Taking into account moral and physical obsolescence, the introduction of modern approaches to the human-machine interaction is required. The paper proposes a mathematical model for calculation the state vector (linear and angular coordinates) of a delta-type control stick from measured information about the relative angular position in its rotational kinematic pairs. Results of the study. An algorithm for calculating the coordinates of the handle of the control stick is synthesized based on a priori information about the relative position of the elements in the delta-mechanism. Taking into account the additional discrete and proportional controls located on the handle of the control stick, the proposed algorithm and its practical implementation make it possible to introduce effective manipulator control modes. Conclusion. The main results of the work include a mathematical model and an algorithm for generating the state vector of the delta-type control stick, which allows the operator to form the linear and angular velocity vectors of the arm manipulator and its gripper movement by one hand. The technical implementation of the control stick and algorithm, as well as its test operation with a dual arm manipulator system, showed the high efficiency of the proposed solutions.
Текст научной статьи Математическая модель, алгоритм формирования вектора состояния и техническая реализация многокоординатного задающего органа внутрикамерных манипуляторов
М.В. Носиков, , И.В. Войнов, , Б.А. Морозов,
M.V. Nosikov, , Voinov, , Morozov,
В технологических процессах переработки отработанного ядерного топлива (ОЯТ) и в аналитических лабораториях соответствующих производств используются герметичные камеры, внутри которых исполнительными органами различных манипуляторов перемещается специальная технологическая тара с жидкими, сыпучими или твердыми радиоактивными материалами. Управление движением манипулятора осуществляется человеком-оператором дистанционно: посредством кинематически подобных задающих органов (ЗО) и системы управления манипулятором, соединенной с исполнительным органом (ИО) механической или электрической связью [1, 2].
В настоящее время наиболее широкое применение для решения поставленных задач на предприятиях атомной промышленности нашли электромеханические манипуляторы МЭМ-10 [3]. Исполнительный орган манипулятора содержит 6 степеней подвижности и размещается внутри герметичной камеры, а кинематически подобный задающий орган с системой управления – в ра- бочей зоне оператора. К недостаткам данного манипулятора относятся значительные люфты в зубчатых передачах манипуляторов, что снижает точность операций взятия-перемещения объектов манипулирования, необходимость определенных физических усилий человека-оператора при перемещении задающего органа, а также использование устаревшей и давно не выпускаемой системы типа «сельсин-датчик – сельсин-приемник». Серийно выпускаемые промышленные роботы-манипуляторы (KUKA и аналогичные) фактически неприменимы к выполнению задач внутри герметичных камер, в первую очередь из-за низкой радиационной стойкости и их массогабаритных характеристик.
На рис. 1 представлена типовая схема работы с радиоактивными материалами с использованием электромеханического копирующего манипулятора с кинематически подобным задающим органом и оператором в контуре управления.
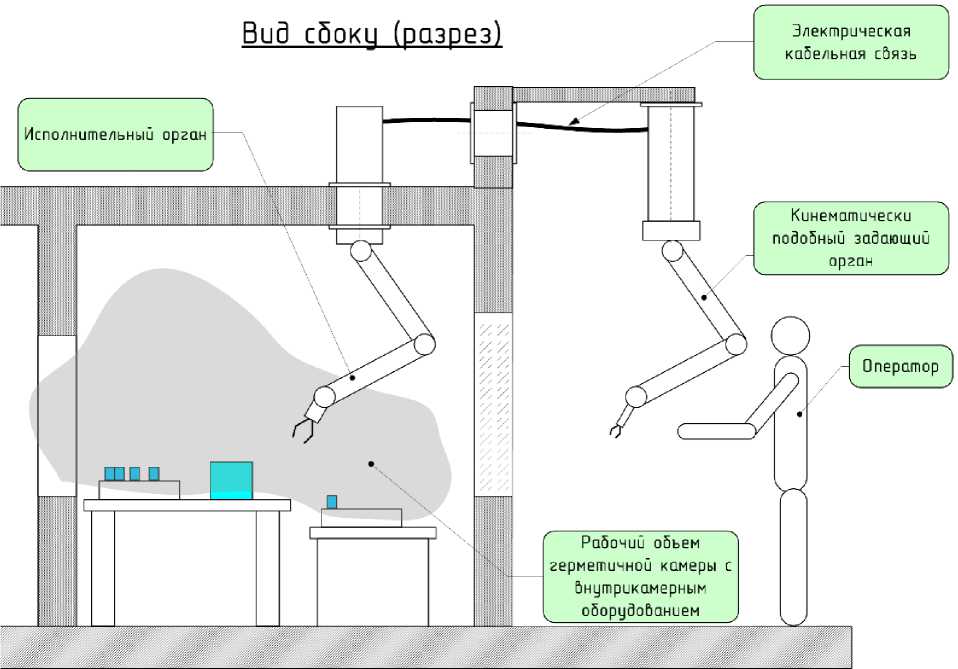
Рис. 1. Копирующий манипулятор в герметичной камере Fig. 1. Copying manipulator in a hotcell
Кроме очевидных достоинств ЗО копирующего типа обладают и рядом недостатков:
-
1) конструктивная сложность как самого ЗО, так и передач ЗО–ИО;
-
2) необходимость механической фиксации промежуточных степеней подвижности ЗО при выполнении ряда операций;
-
3) значительные линейные перемещения ЗО, что в условиях ограниченных по площади рабочих мест операторов может быть помехой.
В связи с этим для построения современных систем управления многостепенными манипуляторами необходимо применять новые подходы и возможности современной элементной базы, при этом исходить:
-
1) из двигательных возможностей оператора (его кинематических и силомоментных ограничений) и возможностей расположения пульта управления относительно герметичной камеры;
-
2) числа степеней подвижности объекта управления – исполнительного органа манипулятора;
-
3) режимов управления объектом управления, способов переключения между режимами;
-
4) необходимости и технической возможности реализации дополнительных каналов человекомашинного интерфейса (дополнительные задающие органы, средства индикации и т. п.).
В ряде отраслей промышленности, а также в медицине нашли применение задающие органы типа «джойстик» [4–7]. Специфические условия эксплуатации манипуляторов в атомной промышленности не позволяют использовать данные наработки непосредственно при работе с радиоактивными материалами.
В общем случае при использовании ЗО типа «джойстик» существуют три основных метода управления манипулятором: управление по вектору скорости (УВСК), управление по вектору силы (УВС), управление по положению (УП) [8, 9].
Необходимо принять во внимание, что в связи с ограниченным диапазоном перемещений ЗО управление внутрикамерным манипулятором обычно выполняется по вектору скорости (УВСК), а управление по вектору положения при необходимости осуществляется в ограниченных пространственных зонах.
Для работы по методу УВС в состав ЗО должны входить силовые и/или моментные исполнительные приводы, прикладывающие соответствующие силовые воздействия к рукоятке ЗО, в составе манипулятора – датчики моментных усилий в сочленениях манипулятора или датчики линейных сил, возникающих в схвате манипулятора под действием нагрузки или перемещений. Техническая реализация ЗО для данного метода достаточно трудоемка, и в практических конструкциях манипуляторов применяют методы УВСК и УП.
Применение метода УП для ЗО типа «джойстик» в прямом виде также имеет ограничение на применение в связи с небольшим угловым перемещением рукоятки джойстика, связанным с кинематикой человеческой руки и вопросами эргономики, при существенно большем требуемом диапазоне перемещений манипулятора. В связи с этим данный режим допустим при работе в ограниченных зонах пространства путем перехода из режима УВСК в режим УП и по окончании выполнения операций – обратно.
Для обеспечения решения полного комплекса транспортных задач (выход рабочего инструмента в заданную точку зоны обслуживания манипулятора под заданным углом) исполнительный орган манипулятора должен иметь 6 степеней подвижности [3] (кинематических сочленений вращательного или поступательного типа). Соответственно, система управления манипулятора должна обеспечивать управление этими сочленениями через соответствующие приводы и управление рабочим инструментом, в частности схватом манипулятора [10–12].
Учитывая эргономику рабочего места оператора герметичных камер и возможности человека оперировать двумя руками, был разработан манипулятор модели МР-48 [13], система управления которого реализована на двух джойстиках с тремя и четырьмя степенями подвижности соответственно. Манипулятор успешно прошел испытания в реальных условиях эксплуатации.
В процессе опытной эксплуатации МР-48 был сформулирован круг задач, для решения которых требуется обеспечить управление всеми степенями подвижности и рабочим инструментом манипулятора одной рукой человека-оператора. Таковой, в частности, является задача управления внутрикамерным манипулятором, размещенным на подвижном основании (рис. 2).
Таким образом, в ряде применений многостепенных манипуляторов оптимальным (необходимым) является формирование оператором управляющих воздействий одной рукой. При этом необходимо обеспечение всех требуемых режимов управления (индивидуальное и групповое управление приводами степеней подвижности манипулятора, управление схватом манипулятора в декартовой системе координат и т. д.).
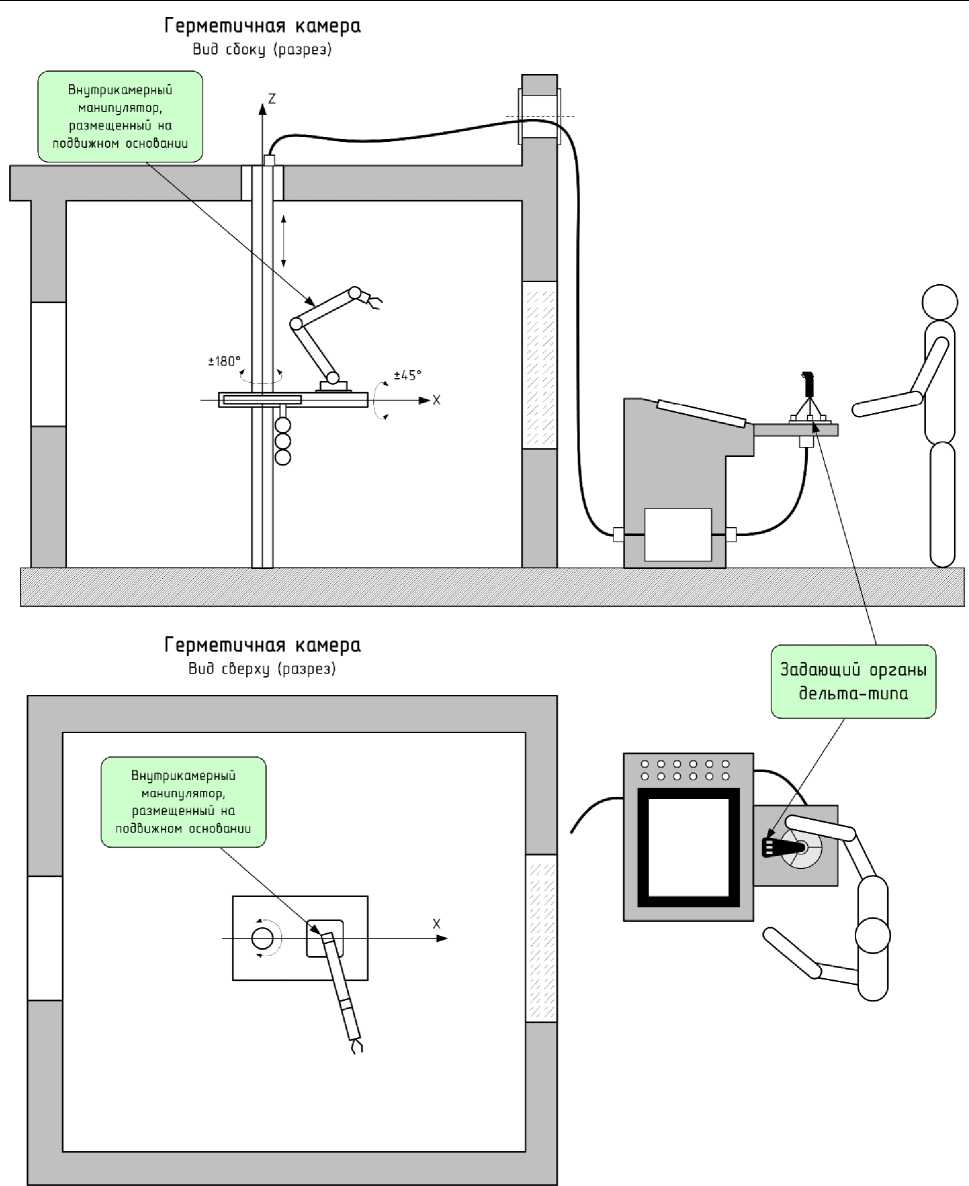
Рис. 2. Внутрикамерный манипулятор на подвижном основании с дистанционным управлением от джойстиков
Fig. 2. Hotcell manipulator on movable base with joysticks distance control
Предлагается решение указанной задачи с помощью задающего органа, выполненного по кинематической схеме дельта-типа, внешний вид которого приведен на рис. 3.
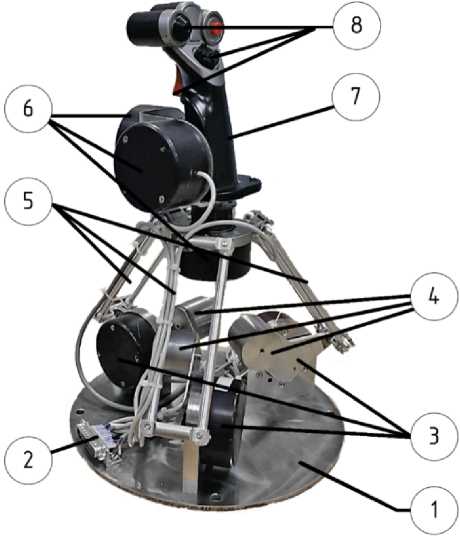
Рис. 3. Внешний вид многостепенного джойстика дельта-типа
Fig. 3. Structure and parts of delta-type joystick
На рис. 3 обозначены:
-
1 – неподвижное основание;
-
2 – выходной информационный разъем;
-
3 – шарнирные подвесы и датчики углового положения промежуточных тяг (рычагов);
-
4 – противовесы;
-
5 – основные тяги к верхней подвижной платформе;
-
6 – датчики углового положения рукоятки (ориентации рукоятки);
-
7 – управляющая рукоятка;
-
8 – дополнительные дискретные и пропорциональные каналы управления.
В предложенной кинематической схеме оператор имеет возможность независимого линейного перемещения рукоятки вдоль осей связанной с основанием декартовой системы координат OXYZ и, независимо от линейного положения, ее ориентирования в полулирном подвесе на углы а, р, у. Диапазоны линейного пере- мещения определяются конструкцией шарнирных подвесов и длинами тяг (поз. 3, 5, рис. 3), аналогичным образом конструкцией полулирного подвеса определяются диапазоны углов ориен тации рукоятки. Оператор пальцами кисти имеет возможность воздействия на дополнительные пропорциональные и дискретные каналы управления, размещенные непосредственно на рукоятке.
Выходной вектор состояния данного ЗО можно представить следующим образом:
O OUT ( t ) =
'^ pY) T ' ( X , y , Z ) T O PC V O DC У
' F 1 ( q a , q e , q Y ) '
F 2 ( q j 1 , q j 2 , q j 3 )
O PC
V ODC У
где OOUT ( t ) - выходной вектор состояния задающего органа;
OPC – вектор состояния дополнительных пропорциональных каналов управления, разме- щенных на рукоятке;
-
O DC – вектор состояния дополнительных дискретных каналов управления, размещенных на рукоятке;
-
а , в , Y — углы ориентации рукоятки;
-
x , y , z – координаты линейного положения рукоятки относительно основания;
-
q а , q p , q Y - сигналы (информация) от датчиков углового положения рукоятки (поз. 6, рис. 3);
-
qj 1, qj 2, qj 3 – сигналы (информация) от датчиков углового положения, расположенных на основании ЗО (поз. 3, рис. 3);
-
F 1, F 2 – отображения множеств информационных сигналов датчиков углового положения в векторы выходных координат ЗО.
-
Введем следующие обозначения элементов дельта-механизма (рис. 4):
-
L 1 = OA 1 = OA 2 = OA 3; L 2 = A 1 B 1 = A 2 B 2 = A 3 B 3; L 3 = B 1 D = B 2 D = B 3 D .
Задача определения линейного положения рукоятки джойстика в пространстве сводится к нахождению координаты точки D при заданных длинах звеньев L1, L2, L3 и углах поворотов шарниров qj1,qj2,qj3.
Используя метод трилатерации, сформируем алгоритм вычисления координаты точки D . Трехмерная проблема трилатерации представляет собой нахождение координат точки пересечения трех сфер. Пусть B 1 ( x 1 , y 1 , z 1 ) , B 2 ( x 2 , y 2 , z 2 ) , B 3 ( x 3 , y 3 , z 3 ) - центры исходных сфер; L 3 = B 1 D = B 2 D = B 3 D - радиусы сфер; D ( x , y , z ) - искомая точка. По известным длинам звеньев
L 1, L 2, L 3 , измеренным углам шарниров qj 1, qj 2, qj 3 и начальному условию, что основание A 1 A 2 A 3 является равносторонним треугольником, определим координаты центров сфер B 1, B 2, B 3 (формула (2), рис. 4, 5).
x 1 = L 1 + L 2 cos( q j 1 ); У 1 = 0; z 1 = L 2 sin ( q j 1 ) ;
x 2 =— ( L 1 + L 2cos ( q j 2
П I ; z 2 = L 2 sin ( q j 2 ) ;
6 ) x 7
I n x3 =—( L1 + L 2cos (qj 3)) sin I— I;
y 3 =- ( L 1 + L 2 cos ( q j 3
n i ; z 3 = L 2 sin ( q j 3 ) . 6 )
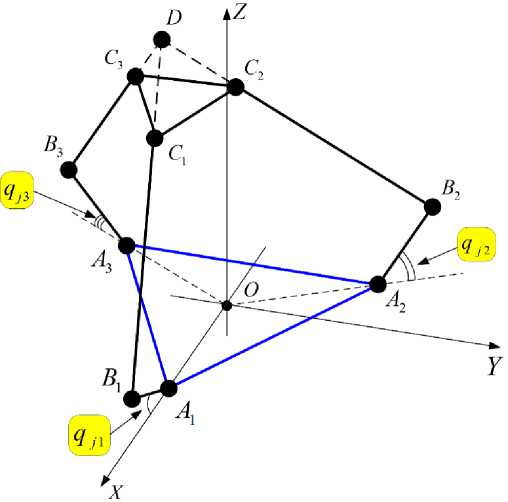
Рис. 4. Геометрическая модель многостепенного джойстика дельта-типа Fig. 4. Geometric model of delta-type joystick
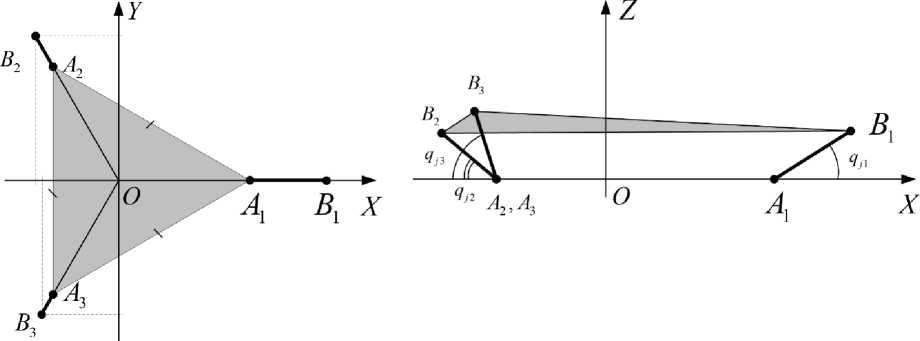
Рис. 5. Проекции точек A i , B i на плоскости XY , XZ
Fig. 5. Projections of points A i , B i to planes XY , XZ
Пользуясь тем, что каждая пара сфер пересекается по окружности, центр которой лежит на прямой, соединяющей центры сфер, и тем, что данная окружность лежит в плоскости, перпендикулярной данной прямой, можно решить задачу через линейную систему уравнений.
Найдём точку B 12 – центр окружности, по которой пересекаются первые две сферы. Посколь-
D (x + x2 У1 + У2 z + z2 )
ку радиусы сфер равны, то точка B i2 1 1 2 , 1 2 , 1 2 I является серединой отрезка BiB 2.
Искомая точка D лежит в плоскости, проходящей через B 12 и перпендикулярной B 1 B 2 . Для неё выполняется уравнение данной плоскости
( x + x2 ^/ Г y +y ^/ Г z + z2 ^/
I x \ 2 l ( x 2 - x i ) + 1 У ''2 2 1 ( У 2 - У 1 ) + l z 1 2 2 l ( z 2 - z i ) = 0 (3)
или иначе x (x 2
- x ) + У ( У 2 - У1) + z ( z 2
12 2 2
- z 1 ) - — ( x 2 - x 1 + y 2
- у 12 + z 2 - z 12 ) .
Аналогичное уравнение выводится для координат точки B13 – центра окружности и середи- ны отрезка B1B3 :
X ( X3
- xi) + У (У3 - У1) + z (z 3
- z i ) - 2 ( x з - x i + У з - У 1 + z з - z i ) .
Пересечение двух полученных плоскостей даёт прямую, перпендикулярную плоскости тре-угольника B 1 B 2 B 3 . Пересечение данной прямой с плоскостью треугольника даёт точку P – основание перпендикуляра из точки D на плоскость треугольника. Дополнив систему уравнением плоскости треугольника, получим линейную систему уравнений для координат точки P .
Уравнение плоскости треугольника:
[ ( У 3 - У 1 )( z 2 - z i ) - ( У 2 - У 1 )( z з - z i ) ] ( x - x i ) +
+ [( z 3 - zi )( x 2 - xi )-( z 2 - zi )( X3 - xi )](У - У1 ) +
+ [ ( x 3 - x i )( y 2 - У 1 ) - ( x 2 - x i )( У 3 - У 1 ) ] ( z - z i ) - 0. (6)
Преобразуем уравнение (6):
[ ( У 3 - У 1 )( z 2 - z i ) - ( У 2 - У 1 )( z 3 - z i ) ] x + [ ( z 3 - z i )( X 2 - x i ) - ( z 2 - z i )( X 3 - x i ) ] У +
+ [ ( X 3 - x i )( У 2 - У 1 ) - ( X 2 - x i )( У 3 - У 1 ) ] z -[ ( У 3 - У 1 )( z 2 - z i ) - ( У 2 - У 1 )( z 3 - z i ) ] x i +
+ [ ( z 3 - z i )( X 2 - x i ) - ( z 2 - z i )( X 3 - x i ) ] У 1 +[ ( X 3 - x i )( У 2 - У 1 ) - ( X 2 - x i )( У 3 - У 1 ) ] z i . (7)
Координаты точки P находятся как решение системы трех линейных уравнений (4), (5), (7) с тремя неизвестными x , y , z . Данную систему можно представить в матричном виде AX = B .
Введем обозначение:
A a i i - a i - a i , a e { x , у , z } , i e { 2,3 } .
Тогда:
A -
A x 2i
A x 3i
( A y 3i A z 2i -A У 2i A z 3i
A y 21 A z 2i
A У 31 A z 3i
A z 3i A x 2i -A z 2i A x 3i A x 3i A y 2i -A x 2i A y 3i ^
y 12
+ z 2 - z i2 )
B -
1 ( x 32
- x i + y 3 - y i + z 3 - z i )
(A y 3i A z 2i
- A y 2i A z 3i ) + ( A z 3i A x 2i - A z 2i A x 3i ) + ( A x 3i A y 2i - A x 2i A y 3i )
Обозначим найденные координаты точки P как x0 , y0 , z0 . Тогда координаты точек пересече- ния трех сфер:
x = x о + k ( ( y 3 - y i )( z 2 - z i ) - ( y 2 - y i )( z з - z i ) ) ; y = y 0 + k ( ( z 3 - z 1 )( x 2 - x 1 ) - ( z 2 - z 1 )( x 3 - x 1 ) ) ; z = z 0 + k ( ( x3 - x 1 )( y 2 - y 1 ) - ( x 2 - x 1 )( y 3 - y 1 ) ) .
k = ±
У L 3 - 1 ^^ 112
2 S B 1 B 2 B 3
где SB 1 B 2 B 3 – площадь треуго льника B 1 B 2 B 3 .
Одна из точек может быть о тброшена, так как она имеет отрицательную координату по оси аппликат. Точка с положительной координатой z будет являться искомой точкой D .
Полученные координаты дают составляющую (x, y, z)T в векторе состояния ЗО (1). Ориентация рукоятки в пространстве (углы а, в, у) вычисляется методом прямого измерения и преоб разования сигналов qа, qp, qу датчиков углового положения, установленных в полулирном подвесе. В результате вычисленный полный вектор состояния ЗО (1) позволяет реализовать метод управления манипулятором (схватом манипулятора либо отдельными его степенями подвижности) по вектору скорости либо в позиционном режиме, оператор при этом осуществляет управление одной рукой. Дополнительные каналы управления (пропорциональные или дискретные), размещенные на рукоятке задающего органа, могут быть использованы для задания (переключения) специальных режимов движения манипулятора, управления положением и ориентацией подвижного основания, управления внутрикамерным технологическим оборудованием.
Заключение
Предложенный в статье спос об управления манипулятором от задающего органа дельта -типа с результирующими тремя лине йными и тремя угловыми выходными коор динатами в векторе состояния, а так же дополнитель ными пропорциональными и дискретными к аналами позволяют человеку- оператору осуществля ть выполнение внутрикамерных транспортн ых и технологич е ских операций более естественн ым для человека образом, что в целом приво дит к снижению и здержек времен и, утомляемости, повышению точности управления.

а) b)
Рис. 6. Манипуляционная система МР-64 (а) и ее задающий орган (b) Fig. 6 Manipulator system MR-64 (a) and its control delta-joystick (b)
Алгоритм реализован в составе опытного образца манипуляционной системы МР-64 (рис. 6а)
-
[14] . В состав манипуляционной системы входит исполнительный орган, пуль т управления с се н-
- сорным экраном, задающий орган дельта-типа. В ходе отладки, испытаний и опытной эксплуатации манипуляционной системы подтверждены предложенные алгоритмические решения и возможность эффективного (с точки зрения затрат времени и точности) выполнения операций одной рукой (рис. 6b).
С целью анализа эффективности действий оператора при выполнении технологических операций, соответствия характера движений манипулятора оптимальным траекториям, а также дальнейшей настройки и адаптации системы человеко-машинного интерфейса и системы управления в целом данные о векторах состояния манипуляторов сдвоенной манипуляционной системы, векторах состояния задающих органов передаются в базу данных системы тренажерного обучения и анализа действий операторов, реализованной на основе фрэймворка ROS [15], структура которой описана в [16, 17].
Список литературы Математическая модель, алгоритм формирования вектора состояния и техническая реализация многокоординатного задающего органа внутрикамерных манипуляторов
- Sturges R.H. Practical field robotics: A systems approach. Wiley, 2015. 479 p. DOI: 10.1002/9781118941171, ISBN 978-1-118-94114-0.
- Field and Service Robotics: Results of the 8th International Conference / K. Yoshida, S. Tadokoro (Eds.). Springer, 2014. (Springer Tracts in Advanced Robotics. Vol. 92). DOI: 10.1007/978-3-642-40686-7, ISBN 978-3-642-40685-0.
- Юревич Е.И. Основы робототехники. СПб.: БХВ-Петербург, 2005. 416 с. ISBN 5-941574-73-8.
- Dynamic and interactive generation of object handling behaviors by a small humanoid robot using a dynamic neural network model / M. Ito, K. Noda, Y. Hoshino, J. Tani // Neural Networks. 2006. Vol. 19 (3). P. 323–337. DOI: 10.1016/j.neunet.2006.02.007
- Human-Robot Interaction / N. Sarkar (Ed.). Vienna, Austria: I-Tech Education and Publishing, 2007. DOI: 10.5772/51, ISBN 978-3-902613-13-4.
- Brain-controlled interfaces: Movement restoration with neural prosthetics / A.B. Schwartz, X.T. Cui, D.J. Weber, D.W. Moran // Neuron. 2006. Vol. 52, iss. 1. P. 205–220. DOI: 10.1016/j.neuron.2006.09.019
- Nagata F., Watanabe K. Controller design for industrial robots and machine tools: Applications to manufacturing processes. Woodhead Publishing Limited, 2013. 357 p. ISBN 978-0-85709-462-9.
- Montesano L., Minguez J., Montano L. Modeling dynamic scenarios for local sensor-based motion planning // Autonomous Robots. 2008. Vol. 25, no. 3. P. 231–251. DOI: 10.1007/s10514-008-9092-9
- Springer Handbook of Robotics / B. Siciliano, O. Khatib (Eds.). Springer, 2016. 2155 p. ISBN 978-3319325507.
- Marghitu D.B. Mechanisms and Robots Analysis with MATLAB. Springer, 2009. 479 p. DOI: 10.1007/978-1-84800-391-0, ISBN 978-1-84800-390-3.
- New advances in Mechanisms, Mechanical Transmissions and Robotics. Proceedings of The Joint International Conference of the XII International Conference on Mechanisms and Mechanical Transmissions (MTM) and the XXIII International Conference on Robotics (Robotics ’16). Springer International Publishing, 2016. 472 p. DOI: 10.1007/978-3-319-45450-4, ISBN 978-3-319-45449-8.
- MT 200 TAO Electrically Assisted, Computer-Aided Master-Slave Manipulator. URL: https://www.lacalhene.com/int/applications-products/remote-manipulation/mt200-tao/ (дата обращения: 30.06.2022).
- Патент RU 172431 U1, МПК B25J 1/00, B25J 9/18, B25J 13/02. Манипулятор МР-48 для атомной промышленности / И.В. Войнов, И.Ф. Круглов, Б.А. Морозов и др. 2016.
- Патент RU 209596 U1, МПК B25J 21/00. Манипуляционная система для герметичных камер / И.В. Войнов, И.Ф. Круглов, Б.А. Морозов, М.В. Носиков. 2021.
- Newman W.S. A Systematic Approach to Learning Robot Programming with ROS. CRC Press, 2018. 531 p. ISBN 978-1498777827.
- Nosikov M.V. Architecture of Human-controlled Arm Manipulator Operator Training System // Proceedings of the Global Smart Industry Conference (GloSIC). Chelyabinsk, 2018. P. 1–6. DOI: 10.1109/GloSIC.2018.8570118
- Носиков М.В. Архитектура тренажерной системы подготовки операторов радиационно-стойких манипуляторов // Вестник ЮУрГУ. Серия «Компьютерные технологии, управление, радиоэлектроника». 2019. Т. 19, № 2. С. 38–54. DOI: 10.14529/ctcr190204
