Математическая модель алгоритмов пеленгования источников радиоизлучения фазо-корреляционными пеленгаторами с пространственным распределением элементов пеленгационной решетки

Автор: Карманов Юрий Трофимович, Заляцкая Инна Ивановна
Статья в выпуске: 35 (294), 2012 года.
Бесплатный доступ
Разработана математическая модель алгоритмов пеленгования источников радиоизлучения (ИРИ) фазо-корреляционного пеленгатора с произвольным распределением в пространстве элементов пеленгационной антенной решетки, учитывающая влияние мешающих факторов в виде неидентичностей каналов и шумов приемных трактов.
Алгоритм пеленгования, модель, пеленгационная антенная решетка
Короткий адрес: https://sciup.org/147154851
IDR: 147154851 | УДК: 621.372.542
Mathematical models of algorithms for direction finding of radio-frequency radiation sources by phase correlation direction finders with spatial distribution of direction finding array elements
Mathematical model of algorithms for direction finding of radio-frequency radiation sources of a phase-correlation direction finder with random spatial distribution of elements by direction finding antenna arrays, taking into account the influence of disturbances in the form of non-identicality of channels and receive paths noises, is developed.
Текст научной статьи Математическая модель алгоритмов пеленгования источников радиоизлучения фазо-корреляционными пеленгаторами с пространственным распределением элементов пеленгационной решетки
Цифровые технологии обработки СВЧ-радиосигналов позволяют реализовать пеленгацию источника радиоизлучения (ИРИ) в широком частотном диапазоне при произвольном расположении элементов пеленгационной антенной решетки в пространстве. Это упрощает размещение таких пеленгаторов на малоразмерных объектах (самолеты, дистанционно пилотируемые летательные аппараты, ракеты и т. д.) и создает предпосылки для повышения качества их функционирования.
Вместе с тем при проектировании таких пеленгаторов возникают трудности при исследовании алгоритмов пеленгования из-за отсутствия математических моделей в виде совокупности расчётных соотношений, описывающих процесс пеленгации с учетом произвольного расположения элементов пеленгационной решетки и наличия неидентичностей каналов и внутренних шумов приемного тракта.
В настоящей статье приводится описание одного из вариантов математической модели процесса пеленгования ИРИ.
В пространстве выбрана заданная система декартовых координат ZXYс началом в точке O (z=0, x=0, y=0).
В пространстве действует ИРИ на длине волны λ. ИРИ расположен в точке М u (z=z u , x=x u , y=y u ).
Существует пеленгационная система в виде фазо-корреляционного пеленгатора с произвольным расположением элементов пеленгационной решетки. Она включает в себя [1]:
-
- опорную антенну, находящуюся в точке М оп (z=z оп ,x=x оп ,y=y оп ) . Диаграмма направленности опорной антенны равномерна в секторе нахождения ИРИ;2
-
- пеленгационные измерительные антенны – N антенн в точках М1, М2, М3,… МN – Mi(z=zi,x=x i ,y=yi) i = 1,N. Диаграммы пеленгационных антенн подобны диаграммам направленно-
- Карманов Юрий Трофимович – д-р техн. наук, профессор кафедры инфокоммуникационных технологий, Южно-Уральский государственный университет; ea@drts.susu.ac.ru
сти опорной антенны - равномерные в секторе нахождения ИРИ;
-
- пеленгационную систему, которая в процессе пеленгации ИРИ проводит измерение фазовых сдвигов между радиосигналами, принимаемыми i- й пеленгационной антенной и опорной антенной - Ф;(0и,Ри), i = 1, N, зависящие от азимута 0и и угла места e u ИРИ;
-
- измеренные значения фазовых сдвигов ф;(0и, Р и ), по которым в пеленгационной системе вычисляются значения Дфу = ф; — ф j , i < j, i = 1,N, которые используется в пеленгационной системе для оценки значений - (0и, Р и );
-
- пеленгационную систему, предварительно тестируемую, путем измерения фазовых сдвигов между радиосигналами от i- й антенны и опорной антенны фп^^к), в Т (к), Л Т л)), принимаемых тестовых ИРИ (ТИРИ), находящихся на тестовых углах 0 т (к), в т (к), к = 1,М и излучающих последовательность радиосигналов с длинами волн Л т (п), п = 1,LT. На основе тестовых значений ф1Т (0 Т (к), вТ^к), ЛТ^.п)') вычисляется массив значений А т ф у (0 Т (к), в Т (к), Л Т (п)) = фi П Т0 T Тk), №), Л-^ -ф П 0 Т (к), в Т (к), Л Т (п)) j = 1,N, i = 1,j, к=1,М, п = 1,LT. Тестовый массив хранится в базе данных пеленгационной системы и используется при вычислении пеленга ИРИ фазо-корреляционным алгоритмом.
Фазо-корреляционный алгоритм пеленгации ИРИ , который заключается [1 ]
-
а) в измерении ф(0 и , в и , Л), i = 1,N и вычисления по ним Дф , (0 и , в и , Л) = ф , (0 и , в и , Л) - ф , (0 и . в и , Л) , i
-
б) вычислении корреляционной суммы 1(0 т (к), в Т (к), Л Т (п)/ 0 и , в и , Л), где Л Т л) - тестовое значение длин волн ТИРИ ближайщее к длине волны Л пеленгуемого ИРИ (определяются по результатам измерения несущей частоты пеленгуемого сигнала) по выражению (1):
г
,Ри.^ =
1(0т(к'),Р т (к'),^(П ^ )
\ 0и
N(N — 1)
/
j=1 \К]
у cosS tj
/
й у2 ^SiLTlStj /
Uj = Дф/j(0u,Рu,Я)—ДтФij(0т(k),Рт(k),Л(nЛ));
(1) в) вычислении пеленгационного сигнала
Т(0 Т (к), в Т к), Л Пп/^и, в и , Л ) =
= -1О1д(/(0т(к), вТк), Лт(л)/0и, ви, Л)),
Л т (л л ) - значение Л т (л л ), п = 1,LT ближайшее к длине волны ИРИ - Л ;
-
г) в качестве оценки пеленга ИРИ 0 и , в и выбираются значения 0и = 0т(ко), Ри = вт(к0), при которых пеленгационный сигнал Т (0 т ( к ), вТ^к), Л т (п)/0 и , в и , Л) достигает своего абсолютного минимума,
Т\0 и = 0 т (к о ),Р и = в т (к о )\ =
= Мтк=^Т(0 т (к), Р т (к), А т (пх)/0 и , Р и , А)
Процессу пеленгования мешают следующие факторы:
-
- наличие шумов в измерительных радиоканалах пеленгатора;
-
- неидентичности фазовых характеристик антенн, каналов пеленгатора.
Все эти факторы приводят к появлению в измеряемых значениях ф ; паразитных фазовых сдвигов - E i , значения которых не связаны с измеряемыми пеленгами.
В математической модели будем полагать, что E 1 , e2,.. E N - случайные величины.
Задача состоит в нахождении совокупности математических выражений, позволяющих вычислить пеленгационный сигнал Т^Т^к), вТ^к), Л т ( л )/0 и , в и , Л) по заданным характеристикам пеленгационной системы и заданным значениям E 1 , E 2 ,. E n , в сферической и угловой системах координат.
Математическая модель алгоритмов пеленгации в сферической системе координат В задачах радиолокации и радионавигации используется сферическая система координат, изображенная на рис. 1.
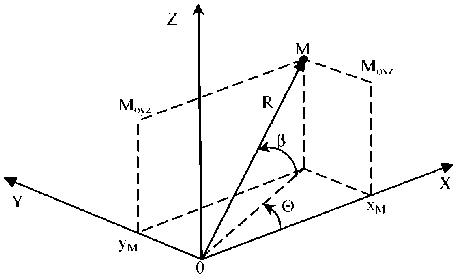
Рис. 1. Сферическая система координат
Координаты точек в сферической системе R, 0 , в связаны с декартовыми координатами соотношениями:
1 х = R • cosP • cos0, у = R • cosP • sin0, z = R • sinp.
Фазовый сдвиг между радиосигналами ИРИ, принятыми i -й антенной и опорной антенной, вычисляется в сферической системе координат по выражению:
Математическая модель алгоритмов пеленгования источников радиоизлучения фазо-корреляционными пеленгаторами с пространственным распределением элементов…
Г ф1 (д и , Р и , Л) 2v : 5 + Е . ,
1 ф /Т (6 т (к), ^ Т (к),Л Т (п я )) = 27 ^ г °" + £ Т1, X Л г ( п ^ )
где R i , R on – расстояние между ИРИ и i- й измерительной и опорной антеннами.
Значения R i , R on вычисляются по выражениям:
Г ^ = [(xz- %J2 + (y - yj2 + (zt - zu)2]1 / 2, t^ on = [(^ on — ^ u ) + (N on У и ) + (^ on — ^ u ) ] ■
Заменяя в данном выражении декартовые ординаты на сферические, запишем значения меряемых ф ^ и тестовых ф^:
Ф ( 0 „ , р и , z ) — [ x i cos р и cos © и +
-
+ У 1 sin Р и cos © и + z i sin Р и ] + E i ,
Фиг ( ©T (k), рг ( k) , У (пЯ)) -
-
- —-—- xiT cos P t ( k ) cos © T ( k ) ,
ко-
из-
ф2Г (©T (k) , рг ( k) , У ( пЯ )) -
2 „
-
-—--- У г sin p T ( k ) cos © t ( k )
Фы г ( © т ( k ) , р г ( k ) , / Г ( п Я ) ) - ^ , 27 х z i sin P t ( k ) ,
Математическая модель алгоритмов пеленгации в угловой системе координат
Угловая система координат используется в задачах радиоуправления летательными аппаратами. Положение точки М в угловой системе координат характеризуется координатами:
-
• R - расстояние от начала координат до точки М;
-
• ах - горизонтальный угол линии визирования ОМ в плоскости ZOX;
-
• ау - вертикальный угол линии визирования ОМ в плоскости ZOY.
Угловая система координат представлена на рис. 2.
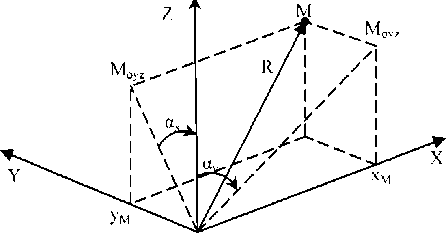
Рис. 2. Угловая система координат
Сферические координаты точки М связаны с угловыми координатами соотношениями:
фг (©т (k), Pt (k), Яг (пЯ)) ~
- Фи г + ^ 2 iT + Ф з гг + E Ti ,
tg © -
tg «У tg «X
E Ti - случайные ошибки измерения тестовых фа
|sin р - [ 1 + tg2 « х + tg2 « у ] 1/2
зовых сдвигов ф1Т .
Используя выражения (1) и (3), представим выражения для пеленгационного сигнала в сферической системе координат в виде:
5 а - 2 7 [ ( x i " x j ) cos р и cos ©u +
+ (yi - У;)cos ри sin ©u ++ (zi - zj )sin ри + (Ei - Ej )] -
Используя эти соотношения, представим выражения для пеленгационного сигнала в угловой системе координат в виде:
s 2.7 ^i - — i Я
(x i - x j )tg « x + ( y i - У ; )tg « y + (z i
-
27 , [ ( x i - X ; ) cos ©T ( k ) cos P t ( k ) +
2 7 -----X Я (п Я )
j +
<
+ ( y i - У ; ) sin P t ( k ) cos ©T ( k ) + + ( z i - z j ) sin р г ( k ) + ( E Ti - E Tj ) ] , T ( © t ( k ) , P t ( k ) , Я г ( n x ) / © и , Р и , Я ) -
= - 10lg ^
N
Z cos 8 i
A 2
A 2
(x i - x ; )t g « Tx ( k ) + ( y i - У ; tg « Ty ( k ) + (z i - z j )
1/2
+ ( E Ti E Tj ) ] , (5)
T [Tx ( k ) , « Ty ( k ) , Я Т ( п Я ) / « х , « y , Я ] -
N
+ ^ sin 8 i
,
= - 10lg ^
г
N
У cos 5 i
А2
г
N
+ Z sin 8 ij
А2
г ,
Я Т ( п я ) - значение Я г ( п ) , ближайшее к Я .
V i < ;
R ^ ^ ; « x , « y - угловые координаты ИРИ
|a x | < 90° , | a y | < 90 ° ; a Tx , a Ty - угловые координаты тестового ИРИ | a Tx | < 90 ° , | a Ty | < 90 ° .
Предложенные математические модели удобно использовать при выборе параметров пеленгаторов путем оперативного моделирования их пеленгационных характеристик для исключения ложных пеленгов, формирования требований к неидентичностям каналов пеленгатора и уровням шумов в них.
В качестве примера, иллюстрирующего сказанное, на рис. 3 приведена пеленгационная характеристика пеленгатора, у которого пеленгационные элементы расположены по спирали на стенках цилиндра диаметром и высотой 30 см, при пеленгации ИРИ с 0и = 20°, ^м = 45° и X = 30 см. Ось цилиндра совпадает с осью OZ.
Как следует из рисунка, пеленгатор с такой «экзотической» пеленгационной антенной решеткой имеет пеленгационную характеристику с ярко выраженным минимумом в направлении ИРИ.
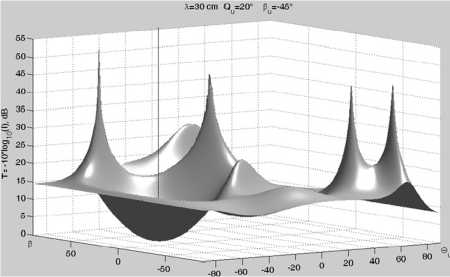
Рис. 3. Пеленгационная характеристика
Ложные минимумы на 10 дБ меньше истинного минимума, что позволяет прогнозировать низкий уровень появления ложных пеленгов.
Список литературы Математическая модель алгоритмов пеленгования источников радиоизлучения фазо-корреляционными пеленгаторами с пространственным распределением элементов пеленгационной решетки
- Рембовский, А.М. Радиомониторинг: задачи, методы и средства/А.М. Рембовский, А.В. Ашихмин, В.А. Козьмин. -М.: Горячая линия -Телеком, 2006. -492 с.
