Математическая модель асинхронного двигателя с эксцентриситетом ротора

Автор: Прудников А.Ю., Боннет В.В., Логинов А.Ю.
Журнал: Вестник Красноярского государственного аграрного университета @vestnik-kgau
Рубрика: Технические науки: Процессы и машины агроинженерных систем
Статья в выпуске: 6, 2015 года.
Бесплатный доступ
В статье приведено математическое описание асинхронного электродвигателя при эксцентриситете ротора, составлена система уравнений относительно токов и потокосцеплений обмоток.
Асинхронный электродвигатель, эксцентриситет, математическая модель
Короткий адрес: https://sciup.org/14084356
IDR: 14084356 | УДК: 621.333.2.001.57
The mathematical model of the induction motor with the rotor eccentricity
The article presents the mathematical description of the induction motor in the rotor eccentricity, the system of equations for the currents and winding flux linkages is composed.
Текст научной статьи Математическая модель асинхронного двигателя с эксцентриситетом ротора
Определение связей между диагностируемым дефектом и диагностическим признаком может быть осуществлено экспериментально или на основе математической модели, которая позволит определить эту связь теоретически. Следует учитывать, что математическая модель не может отражать все факторы, характеризующие реальный объект, и поэтому полного соответствия с экспериментом получить не представляется возможным. К достоинству математической модели относится то, что у объекта можно создавать дефекты и изменять степень их проявления. При этом продолжительность расчетов модели занимает значительно меньше времени, чем проведение эксперимента.
Простейшая модель асинхронного двигателя имеет вид двухфазного электромеханического преобразователя с двумя обмотками на статоре и роторе, сдвинутыми относительно друг друга по фазе на 90° (рис. 1) [2, 3].
Рис. 1. Модель обобщенной электрической машины
Здесь ω rα , ω rβ , ω sα , ω sβ – число витков обмоток ротора и статора по осям α и β соответственно; u rα , u rβ , u sα , u sβ , – напряжения в обмотках ротора и статора по осям α и β соответственно; ω r – угловая скорость ротора.
Для описания модели обобщенной электрической машины справедливы уравнения [2]:
– напряжения r^Sα
Щ- α ur β = ps β
d rsα+dt ^sα
d
— M dt
d
— M dt d rsα+dt ^r α
- Mat
- Lr αш 0
^rβ 0)r d r’β+dtLrβ
Мы
d
— M dt
d
— M dt
d
×
Flsα
⎢ ir α ⎥ ⎢ ir β ⎥ ⎣ β ⎦
;
r'β+ dt ^sβ
– электромагнитного момента
– движения
M э =Μ( is β ir α
-
is α ir β );
d(0r
± Mc = э ,
где i rα , i rβ , i sα , i sβ – токи в обмотках ротора и статора по осям α и β соответственно; r rα , r rβ , r sα , r sβ – активные сопротивления обмоток ротора и статора; М – взаимная индуктивность; L rα , L rβ , L sα , L sβ – полные индуктивности обмоток ротора и статора по осям α и β; ω r – угловая скорость ротора; M э – электромагнитный момент; M с – момент сопротивления на валу машины.
Взаимная индуктивность между обмотками ротора и статора описывается выражением
M = ^(0),
где ω s , ω r – число витков обмоток статора и ротора соответственно; k s , k r – обмоточный коэффициент статора и ротора соответственно; т – полюсное деление; ia – длина пакета активной части ста-
тора; А(в) - удельная магнитная проводимость воздушного зазора, зависящая от угла поворота ротора 0 .
Для моделирования удобно уравнение (1) преобразовать и записать относительно потокос-цеплений и токов:
1 г а
MVra
(LSL
—
dVs а
dVr а
1 s а
dt
М2 )
—
dt
= U s а
= Ыг Чага
^г ‘га
(LSL
—
—
—
Rs ls а;
R riГР ;
М2 ) ; lsP
М 4S а (L SL
—
d4 se_
= ^-s p
dt
—
rs l s в;
dVr в
dt
= ^г ^ г в
Lr^sp
(LSL
—
М2 )
—
—
М2 ); i r e =
MVrp
(LSL
—
Мэ = (тр/2)(M/L r)( i S р Чага
da>-
—
lrаЧгв); dt
Rriга ;
М 4S а (L SL
—
М2 );
М2 )
—
М'Р р (LSL
—
М 2 );
Р
J (Мэ
—
Мс )
где ^га , Ч гр , Ч sа , 4 sp - потокосцепления обмоток ротора и статора по осям а и в; R s = r sa = r se ; R r = r rα = r rβ ; p – число пар полюсов; L r , L s – индуктивности рассеяния ротора и статора соответственно; m – число фаз.
Для математического моделирования электродвигателя с эксцентриситетом ротора необходимо учесть зависимость воздушного зазора δ от угла поворота ротора при смещении его оси на расстояние d от оси статора, определяемую выражением
800) = R — г + dcos00) = 8m + dcos00),
где R, r – радиусы расточки статора и ротора соответственно; δm – номинальный воздушный зазор между ротором и статором; d – смещение осей ротора и статора вследствие эксцентриситета; 6 - угол текущего положения ротора (рис. 2).
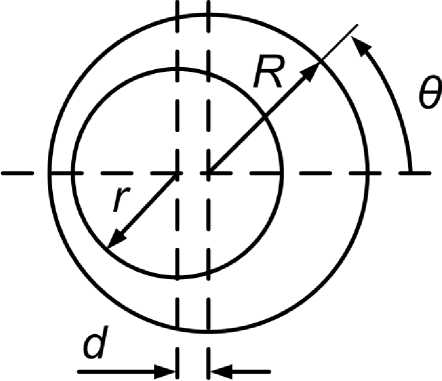
Рис. 2. Эксцентриситет ротора асинхронного двигателя
Цикличное изменение индуктивностей вызывает цикличное изменение сопротивлений обмоток ротора и статора. Вследствие изменения этих сопротивлений появляются пульсации тока статора на частоте fэкс, определяемой выражением экс
= сети (
1±
p
- *,
где f сети – частота напряжения питающей сети; s – скольжение ротора.
При эксцентриситете ротора меняется удельная магнитная проводимость зазора
^З^т(1+£ соѕ(0)), где μ0 – магнитная постоянная; kδ – коэффициент Картера; ɛ = d/δm – относительный эксцентриситет.
С учетом выражения (8) взаимная индуктивность при эксцентриситете ротора определяется выражением
Po
(в)=usksurkrTla ^^(1+£ соѕ(0 )).(9)
С учетом выражения (9) система уравнений (5) примет вид:
^S α D ; . ^β
α=( ^s^r - Mm (0)); hp = - ( ))-Mm (0) ^sa (^s^r - Mm (0));(10)
( -( ))
Mm ( 9 ) 4^
ir α = ГГ () ( )) - Mm ( 0 ) ^sa ( ^s^r - Mm ( 0 ));
( -( ))
Mm (0) ^re lrβ=(LsLr - I'm (9))-Mm (0)^( LsLr - Mm (0 )); э=( /2)( ( )/ )( α- α β); =․
: j ( M э-)
Выводы. Полученные математические выражения позволяют смоделировать работу асинхронного двигателя при различных значениях эксцентриситета ротора. В результате расчетов можно получить функциональные зависимости угловой скорости вращения ротора, тока статора и момента на валу в функции времени ω r (t), i(t), M э (t).
Список литературы Математическая модель асинхронного двигателя с эксцентриситетом ротора
- Петухов В.С. Диагностика состояния электродвигателей на основе спектрального анализа потребляемого тока//Новости электротехники. -2005. -№ 1 (31). -С. 23-26.
- Копылов И.П. Математическое моделирование асинхронных машин: учеб. для вузов. -3-е изд., перераб. и доп. -М.: Высш. шк., 2001. -327 с.
- Копылов И.П. Электрические машины: учеб.для вузов. -2-е изд., перераб. и доп. -М.: Высш. шк., Логос, 2000. -607 с.
