Математическая модель движения мобильного робота с двумя независимыми ведущими колесами по горизонтальной плоскости

Автор: Бартенев В.В., Яцун С.Ф., Аль-еззи А.С.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Механика и машиностроение
Статья в выпуске: 4-1 т.13, 2011 года.
Бесплатный доступ
В статье предложены уравнения движения мобильного робота с двумя независимыми ведущими колесами по горизонтальной шероховатой плоскости. Предложенные уравнения предполагают движение робота без проскальзывания с учетом изменения при отработке криволинейных траекторий действующих на ведущие колеса робота сил нормальной реакции опорной плоскости. Представлены результаты моделирования движения робота по s образной траектории.
Мобильный колесный робот, неголономная электромеханическая система
Короткий адрес: https://sciup.org/148200118
IDR: 148200118 | УДК: 531.8
A mathematical model of motion of mobile robot with two independent driving wheels on horizontal plane
Equations of motion of mobile robot with two independent driving wheels on horizontal rough plane have been offered in this paper. The equations describe motion of the robot without sliding. They describe change of forces of basic plane normal reaction that exists when the robot moves along curvilinear pathways. The simulation data of motion of the robot along a curvilinear pathway are given.
Текст научной статьи Математическая модель движения мобильного робота с двумя независимыми ведущими колесами по горизонтальной плоскости
В настоящее время области применения мобильной робототехники существенно расширяются во многих отраслях деятельности человека. Особенно это характерно для деятельности, осуществляемой при решении специальных задач, сопряженных с угрозами для здоровья и жизни людей. К таким задачам относятся анти-террористические операции, военные действия, пожаротушение и т. п.
Одним из классов мобильных роботов являются колесные роботы. Такие роботы не могут эффективно передвигаться по неподготовленным поверхностям. Однако в случае с подготовленными поверхностями применение колесных роботов в сравнении с использованием других видов мобильных роботов (например, шагающих) более оправдано в силу превосходства по экономичности, скорости передвижения и простоте управления.
Расширение областей применения колесных роботов определяет рост требований к качеству их функционирования, которое характеризуется, например, быстродействием, устойчивостью движений, точностью отработки заданных траекторий. Эффективное определение факторов и условий, обеспечивающих требуемое качество движения мобильных систем, возможно на базе математического моделирования их динамики. В этой связи вопрос развития математических
Бартенев Виталий Владимирович, ассистент кафедры теоретической механики и мехатроники.
моделей динамики колесных систем в соответствии с [6] является актуальным.
УРАВНЕНИЯ ДВИЖЕНИЯ МОБИЛЬНОГО РОБОТА С ДВУМЯ НЕЗАВИСИМЫМИ ВЕДУЩИМИ КОЛЕСАМИ
Будем рассматривать мобильного робота с двумя независимо моторизованными ведущими колесами. Его математические модели, предполагающие движение по горизонтальной шероховатой плоскости, представлены в работах [1-6]. Их анализ позволил заключить следующее. В представленных в работах [2, 5] моделях не учитывается динамика электроприводов. Этого недостатка лишены модели из работ [1, 4, 6]. Однако в этих моделях в недостаточной мере учитывается влияние на движение робота результатов взаимодействия этих колес с опорной плоскостью. В большей степени учет влияния такого рода предусматривается в модели, предложенной в работе [3]. Но при этом в ней не учитывается возникающее при движении робота вдоль криволинейных траекторий изменение сил нормальной реакции, действующих на ведущие колеса со стороны опорной плоскости. Указанное изменение сил нормальной реакции может свидетельствовать об отрыве ведущего колеса от опорной плоскости. Также оно может существенно влиять на динамику робота при больших значениях коэффициента трения качения. Исходя из изложенного, представляется целесообразным составление уравнений движения робота, учитывающих влияние моментов трения качения, приложенных к ведущим колесам, при условии изменения сил нормальной реакции опорной плоскости, обусловленного отработкой криволинейных траекторий.
Вывод уравнений движения робота удобно осуществлять на базе формы уравнений Маджи для электромеханических систем с неголоном-ными связями [6].
Для составления уравнений движения рассматриваемой системы введем следующие системы координат (рис. 1): неподвижную система Oxyz , плоскость которой Oxy совпадает с горизонтальной шероховатой плоскостью, по которой катятся колеса робота, и подвижную система Ax 1 y 1 z 1 с началом в точке A , жестко связанную с его платформой. При этом примем, что центр масс робота C 1 лежит на оси Ax 1 , являющейся осью симметрии шасси. Также примем следующие допущения: робот представляет собой систему абсолютно твердых тел; движение осуществляется без проскальзывания; массы опоры 2 и шестерней редукторов считаются равными нулю; в точке C 2 платформа имеет абсолютно гладкую опору; робот движется опорой вперед.
С учетом принятых допущений робот рассматривается как система трех абсолютно твердых тел, одним из которых является платформа совместно с электродвигателями с редукторами (электроприводами), двумя другими — ведущие колеса. Положение этих тел в системе координат Oxyz определяется вектором обобщенных координат q 1 = | x у Щф 1 ф 2\ , где x , У — координаты точки A (полюса робота) — середины отрезка, соединяющего центры C 3 , C 4 ведущих колес; Щ — угол поворота вокруг вертикали платформы, отсчитываемый от оси Ox ; ф 1 , ф 2 — углы поворота ведущих колес (с центрами в точках C 3 и C 4 соответственно) относительно горизонтальных осей. Так как рассматриваемый робот является электромеханической системой, содержащей два контура с токами, вектор его обобщенных координат q = | x у Щф 1 ф 2 e 1 e 2| включает также заряды e 1 , e 2 такие, что i 1 = e 1 , i 2 = e 2 представляют собой токи в цепях
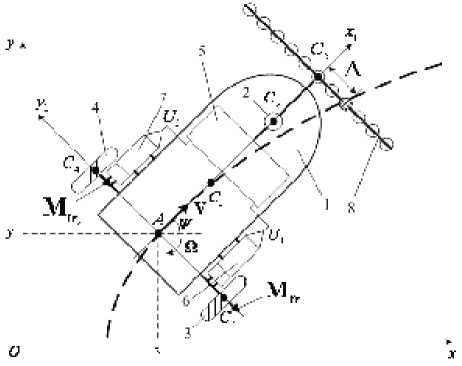
Рис. 1. Расчетная схема мобильного робота для вывода уравнений движения:
1 — платформа; 2 — абсолютно гладкая опора; 3, 4 — ведущие колеса; 5 — блок расчета управляющих напряжений; 6, 7 — электроприводы; 8 — оптронная линейка питания электродвигателей. Соответственно вектор обобщенных скоростей рассматриваемой системы имеет вид q = x у Щ ф1 ф2 е1 ё2| (точка обозначает дифференцирование по времени).
Обобщенные скорости удовлетворяют трем уравнениям неголономных связей:
- x sin щ + у cos щ = 0,
< 5с cosщ + у sin щ + 1Щ - гф, = 0, 5с cosщ + у sin щ - 1хЩ - гф2 = 0,
где l = AC 3 = AC 4 — половина расстояния между ведущими колесами; r — радиус ведущих колес. Поэтому рассматриваемый мобильный робот имеет четыре степени свободы, и вектор его псевдоскоростей П с = | V Q i 1 i 2| включает четыре элемента: скорость V = 5с cos щ + у sin Щ точки A , угловую скорость платформы Q = Щ и токи i 1 = e 1 , i 2 = e 2 во внешних цепях электродвигателей.
Кинематические уравнения движения робота, описывающие зависимость между обобщенными и псевдоскоростями системы, в матричной форме имеют вид
^ r cos щ
0 )
l
П с .
- l 0 0
0 r 0
r ;
Динамические уравнения движения робота имеют вид nc 1
mV = — ( 1 1 + 1 2) + — ( M fr + M fr 2 ) + m1 a Q ,
J Q = ny ( i , - i 2 ) + r ( M fr - M fr 2 ) - m , aV Q ,
Ldi- + Ri, + nc (V +1Q) = U,, dtr di2
L— + Ri2 + (V - IQ) = U2, dtr
J
где m = m1 + 2 mk + 2—у r2
J = J- + (m, + 2mk)a + 2 —у-l ; r2
m1 — суммарная масса платформы и статоров электродвигателей; mk — суммарная масса ведущего колеса и ротора электродвигателя; J1 — момент инерции робота относительно вертикальной оси, проходящей через его центр масс C1; Jy = Jky + n Jry — “приведенный” момент инерции колеса; Jky — момент инерции колеса относительно горизонтальной оси; Jry — момент инерции ротора электродвигателя; n — передаточное число редуктора; a = AC 1 — расстояние от точки A до центра масс робота C1; c — коэффициент электромеханического взаимодействия; Mfr-, Mfr2 — моменты трения качения; L — обобщенная индуктивность цепи электродвигателя; R — омическое сопротивление цепи ротора; U1, U2 — управляющие напряжения, приложенные к электродвигателям.
Совместно с уравнениями (2) уравнения (3) образуют замкнутую систему уравнений для определения обобщенных координат робота q и его псевдоскоростей π & .
Значения M f^ ( K = 1,2 ) из уравнений (3) определяются следующим образом:
- 3 N K sign( Ф к ), Ф к * 0,
MfrK = '
- nciK , фк = 0, I nez < 5 NK , K , K , K K ,
- 5 N K sign ( С ), Ф к = 0, nci t | > 5 N k ,
где § — коэффициент трения качения; NK — сила нормальной реакции горизонтальной опорной плоскости, действующей на K -ое ведущее колесо.
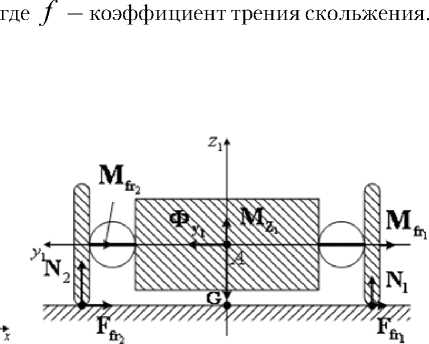
Для определения значений N 1 и N 2 был применен принцип Даламбера. Указанный принцип позволил разработать расчетные схемы, представленные на рис. 2, где Фn — центробежная сила инерции, определяемая нормальным ускорением an ; Фτ — сила инерции, определяемая тангенциальным ускорением aτ ; Mε — момент инерции, определяемый ускорением Ω & ; MZ1 — равнодействующий моментов Mε , моментов, определяемых силами Фn и Фτ , и момента, определяемого силами M f / r и M fr 2 / r ; G — вес робота; VC — скорость центра масс робота.
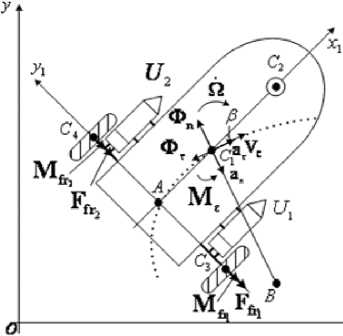
Рис. 2. Расчетные схемы мобильного робота для определения сил нормальной реакции шероховатой плоскости, действующих на ведущие колеса
Равнодействующая параллельных оси Ay 1 составляющих сил и Ф — Ф совместно с равнодействующей сил трения скольжения (при покое) Ffr1 и Ffr2 образует пару сил, влияние которой определяет изменение сил нормальной шероховатой плоскости N1 и N2 при движении робота вдоль криволинейных траекторий. С учетом указанного изменения значения N 1 и N 2 при отсутствии поперечного проскальзывания ведущих колес определяются следующим образом:
ga 1 + r ((V2 + (fi a )2)cosPsign (fi) + fi ap) a + a 1 Ip ga1 r((V2 + (fia)2)cosPsign(fi) + £1 ap)) (5) ___________________________ ^^^^^» a + a1 Ip )
N = m 1 + 2 mt [
1 2 (
N = m i + 2 mi f
2 2 I
где g — ускорение свободного падения; a 1 = C 1 C 2 — расстояние от центра масс робота C 1 до точки крепления опоры C 2 ; p = BC 1 — радиус кривизны траектории движения центра масс робота.
Радиус кривизны траектории движения центра масс робота C 1 определяется следующим образом:
a p | sin в ' (6)
Значение угла в определяется из соотношения
п
-, V = 0
в=
arctg I - V -1 , V * 0-
Движение робота без поперечного проскальзывания ведущих колес предполагает выполнение условия, выражающегося следующим неравенством (предполагается модель сухого трения Кулона):
, . ( V 2 + ( fi a )2)cos esign ( fi ) a.
( m i + 2 mt )1v ’ p ^a < ( N i + N2^f ’ (8)
РЕЗУЛЬТАТЫ МОДЕЛИРОВАНИЯ ДВИЖЕНИЯ РОБОТА
Моделировалось управляемое движение робота по s -образной траектории. Интегрирование предложенных уравнений движения осуществлялось численным методом в разработанном программном приложении. При этом расчет управляющих напряжений U 1 , U 2 осуществлялся следующим образом:
U 1 = U 0 + k Д ,
U 2 = U о - k Д ,
где k — коэффициент пропорциональности; д — отклонение от заданной траектории, измеряемое оптронной линейкой; U 0 — базовое напряжение (подается на двигатели при отсутствии отклонения от заданной траектории движения) (рис. 1).
Параметры математической модели робота были инициализированы следующим образом: m 1 =4,15кг; mk =1,1кг; J 1 =0,7 кг - м2; Jky =0,00028кг - м2; J ry =0,00003 кг - м2; n =5; a =0,15 м; a 1 =0,25 м; c =0,01 В - с; L =0,0002 Гн; R =1 Ом; l =0,2 м; r =0,075 м; f =0,7; 5 =0,00075 м; k = 1,9; U 0 =3,2 В. Начальные условия были следующими: x = 0,3 м ; y = 1 м ; щ = 0 ; ф 1 = 0 ; ф 2 = 0 ; i1 = 0 ; i 2 = 0 ; V = 0 ; Q = 0 ; д = 0 • Конечным условием было: x > 14,05 м •
Результаты моделирования движения робота представлены на рис. 3, где толстой линией обозначена заданная траектория, тонкой — отработанная. Последняя является траекторией движения точки C 5 — середины оптронной линейки.
Временные диаграммы на рис. 4 отражают характер изменения модулей сил нормальной реакции опорной плоскости, действующих на ведущие колеса, и характер изменения кривизны траектории движения центра масс робота C 1 .
Изменение действующих на ведущие колеса сил нормальной реакции опорной плоскости существенно влияет на динамику робота при боль-
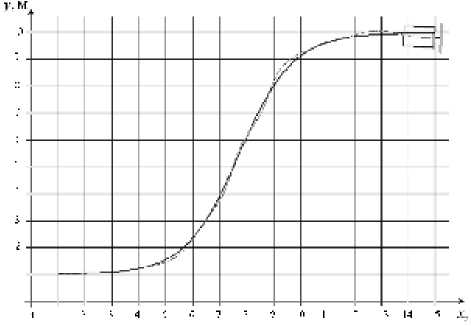
Рис. 3. Заданная и отработанная траектории движения робота
ших значениях коэффициента трения качения 5 , что, в частности, отражается на точности отработки заданной траектории движения. Это проиллюстрировано на рис. 5, где представлен график зависимости среднего модуля отклонения, измеряемого оптронной линейкой, от значения коэффициента трения качения.
Следует отметить, что время отработки заданного участка траектории было одинаковым при всех принимаемых значениях коэффициента трения качения. Это достигалось посредством варьирования параметра U 0 .
В рамках проведенных вычислительных экспериментов отрыва ведущего колеса от плоскости опоры не возникало. Однако на практике нештатные режимы движения по криволинейным траекториям с отрывом от опорной поверхности одного из ведущих колес наблюдаются довольно часто. В этой связи представляет интерес определение условий, выполнение которых обеспечивает безотрывное движение робота по криволинейным траекториям.
Очевидно, что отрыва ведущих колес не возникает, когда N 1 и N 2 из выражений (5) имеют неотрицательное значение, то есть N 1 > 0 л N 2 > 0 • Указанное условие выполняется, если верным является неравенство ( m 1 + 2m k ) r |1 ( V2 + (q a ) 2 )Q arctg^V ||sin| arcigV'^sign( Q) + fl a | < Ns (10) где Ns — модуль силы нормальной реакции шероховатой плоскости, действующей на ведущее колесо робота в случаях его движения по прямолинейным траекториям либо нахождения в состоянии покоя, определяемый из выражения
( m x + 2 m t ) ga , 2( a + a , )
Если рассматривать движение с нулевым Q , то неравенство (10) можно записать в виде
( m. + 2 m, ) r f ( Q a )) | fQ a l)|
-
1------ — (V^ + ( Q a )2 ) cos l arctg sm l arctg\ l< N ,.
-
2 al ( V ) l l V l l s
V 7 V V 77(12)
В этом неравенстве значение радиуса ведущего колеса r представляет собой высоту центра масс робота. Для обеспечения возможности получения решения неравенства (12) относительно V и Q| для различных значений высоты центра масс введем параметр h и заменим им параметр r в неравенстве (12). В результате по- лучаем неравенство вида
( m , + 2 m k ) h 2 al
( V 2 + ( Q a )2
< N s .
Его решения при различных значениях высоты центра масс робота h включает область 1 на рис. 6. Соответственно при значениях V и Q| из области 2 рассматриваемое неравенство не
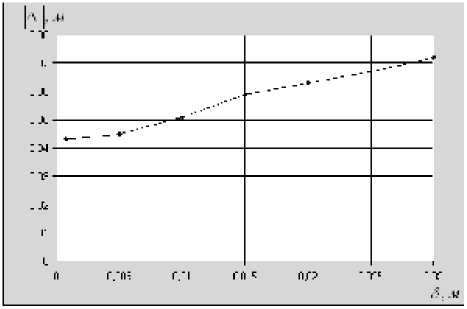
Рис. 5. График зависимости среднего модуля ошибки отработки заданной траектории движения от значения коэффициента трения качения
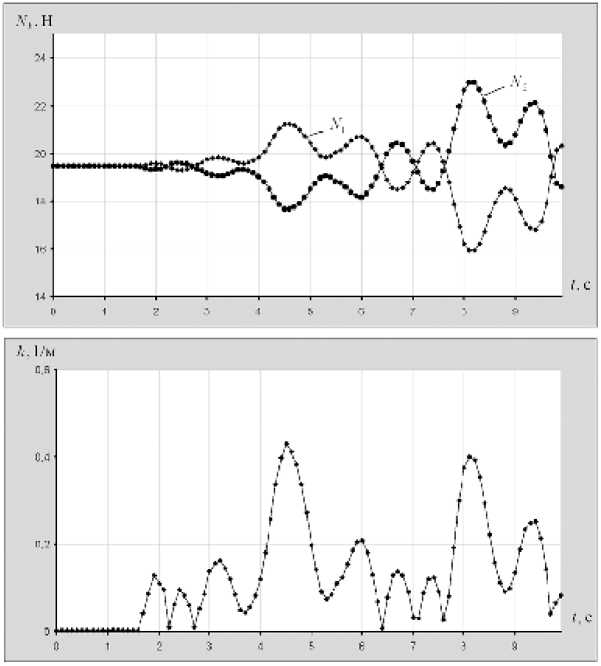
Рис. 4. Временные диаграммы модулей сил нормальной реакции опорной плоскости, действующих на ведущие колеса робота, и кривизны траектории движения его центра масс
выполняется даже при минимальном из принятых значений h .
Штриховой линией на рис. 6 показана граница областей значений параметров движения робота без поперечного проскальзывания и с поперечным проскальзыванием ведущих колес. Первая из них ограничена штриховой линией и осями. Из указанного рисунка следует, что для рассматриваемого мобильного робота при принятом значении коэффициента трения скольжения f отрыва ведущего колеса от горизонталь-
D№
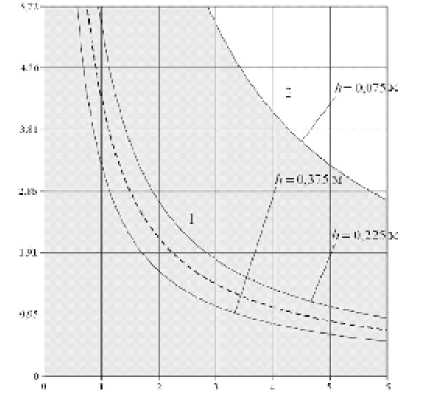
Рис. 6. Области значений параметров движения робота:
1 — без отрыва ведущего колеса от горизонтальной опорной плоскости; 2 — с отрывом ведущего колеса от горизонтальной опорной плоскости ной опорной плоскости не произойдет в силу возникновения поперечного проскальзывания ведущих колес. Указанный отрыв может произойти в случае, например, если высота центра масс h =0,375 м.
ЗАКЛЮЧЕНИЕ
В настоящей работе предложена математическая модель движения мобильного робота с двумя независимыми ведущими колесами по горизонтальной шероховатой плоскости, учитывающая изменение при отработке криволинейных траекторий действующих на эти колеса сил нормальной реакции опорной шероховатой плоскости. Указанная особенность предложенной модели позволяет определять возникновение отрыва ведущего колеса от опорной плоскости. В случаях исследования безотрывного движения ее использование представляет интерес при больших значениях коэффициента трения качения. Практическая значимость полученных результатов заключается в том, что на базе предложенной математической модели представляется возможным синтезировать управление криволинейным движением робота, предотвращающее возникно- вение его нештатных режимов типа отрыв от опорной поверхности одного из ведущих колес.
Список литературы Математическая модель движения мобильного робота с двумя независимыми ведущими колесами по горизонтальной плоскости
- Буданов В.М., Девянин Е.А. О движении колёсных роботов//ПММ. 2003, Т. 67. Вып. 2. С. 244-255.
- Голубев Ю.Ф. Основы теоретической механики. М.: Изд-во МГУ, 2000. 720 с.
- Динамика, управление, моделирование роботов с дифференциальным приводом/В.В. Евграфов, В.Е. Павловский, В.В. Павловский//Теория и системы управления. 2007. №5. С. 171-176.
- Моделирование движения мобильного робота по сложному маршруту/С.Л. Зенкевич, А.В. Назарова, Д.М. Лисицын//Материалы науч. школы конференции "Мобильные роботы 2000". М.: Изд-во Моск. ун-та, 2000. C. 14-27.
- Мартыненко Ю.Г. Динамика мобильных роботов//Соросовский образовательный журнал. 2000. №5. С. 110-116.
- Мартыненко Ю.Г. Управление движением мобильных колесных роботов//Фундаментальная и прикладная математика. 2005. №8. С. 29-80.
