Математическая модель импульсного сканирования давления по длине пьезоэлектролюминесцентного оптоволоконного датчика

Автор: Паньков А.А.
Статья в выпуске: 1, 2018 года.
Бесплатный доступ
Разработана математическая модель локации неоднородностей давления по длине оптоволоконного пьезоэлектролюминесцентного датчика с использованием локационного сканирующего электрического видеоимпульса с пошаговым изменением его величины. Разработан алгоритм нахождения функции распределения давления по локальному участку и по всей длине датчика по результатам замеряемой на торцевом сечении датчика интенсивности исходящего из оптоволокна света для случая нелинейной «функции свечения» - зависимости интенсивности света от действующего на электролюминесцентный элемент электрического напряжения; задача сведена к решению интегрального уравнения Фредгольма 1-го рода с разностным ядром, зависящим от управляющего и информативного передаточных коэффициентов датчика и заданной функции свечения электролюминесцентного элемента. Получены аналитические решения для функций распределения давления по длине датчика для частных случаев, когда ядро или сама функция плотности распределения выражаются через дельта-функцию и интегральное уравнение Фредгольма сводится к алгебраическим. Определены области допустимых значений управляющего напряжения датчика для различных режимов диагностики распределения давления. Представлены результаты численных решений прямой и обратной задач для неоднородного распределения давления посредством «точечного» сканирования этого давления предельно узким импульсом управляющего электрического напряжения. В прямой задаче найдены функции свечения на выходе из оптоволокна для различных моментов времени и значений величины импульса управляющего электрического напряжения с учетом заданной функции свечения электролюминесцентного элемента; в обратной задаче найдено распределение давления по значениям функции интенсивности свечения в различные моменты времени.
Пьезоэлектроупругость, механолюминесцентный эффект, оптоволокно, датчик давления, импульсное сканирование, численное моделирование
Короткий адрес: https://sciup.org/146211717
IDR: 146211717 | УДК: 531.787.5 | DOI: 10.15593/perm.mech/2018.1.06
Mathematical model of pulse scanning of pressure along a piezo-electro-luminescent fiber-optical sensor
The mathematical model is developed aimed at locating pressure non-uniformity along a fiber optic-piezo-electro-luminescent sensor using the location scanning electrical video pulse with a step by step change of its value. The algorithm of finding the function of pressure distribution along a local section and the whole length of the sensor is developed based on the results of the intensity of light proceeding from a fiber optic phase measured on the edge section of the sensor for a case of nonlinear “luminescence function”, which is a dependence between the intensity of light and voltage acting on the luminescent element. The problem is reduced to the solution of the Fredholm integral equation of the 1st kind with the differential kernel depending on the operating and informative transfer coefficients of the sensor and on the set luminescence function of the element. Analytical solutions for the pressure distribution functions along the sensor are obtained for special cases, when the kernel or the function of distribution density is expressed via delta function, and the Fredholm integral equation becomes algebraic. Domains of admissible values of the operating voltage for various modes of diagnostics of pressure distribution are defined. Results of numerical solutions of direct and reverse problems for non-uniform distribution of pressure by means of “pointed” scanning of this pressure are presented by an extremely narrow impulse of the operating voltage. Luminescence functions at the exit from the optical fiber at various time points and values of the impulse of the operating voltage taking into account the set luminescence function of an electroluminescent element are found in the direct problem. The distribution of pressure depending on the values of the luminescence intensity function at various time points is found in the reverse problem.
Текст научной статьи Математическая модель импульсного сканирования давления по длине пьезоэлектролюминесцентного оптоволоконного датчика
ВЕСТНИК ПНИПУ. МЕХАНИКА № 1, 2018PNRPU MECHANICS BULLETIN
Сенсорика за последние годы сформировалась в самостоятельную высокотехнологичную ветвь измерительной техники [1], одной из центральных задач которой является разработка все более совершенных датчиков для диагностирования различных физико-механических параметров исследуемых объектов. К новым датчикам предъявляются все более высокие требования. В частности, наряду с высокими метрологическими характеристиками особое значение придается их высокой надежности, долговечности, стабильности, малым габаритам, массе и энергопотреблению, возможности встраивания в объекты и системы мониторинга, совместимости с микроэлектронными и компьютерными устройствами обработки информации, низкой себестоимости, что в наибольшей степени характеризует именно оптико-электронные волоконные датчики. В [1] рассмотрены классификация, принципы действия, конструкции, параметры и характеристики оптикоэлектронных и волоконно-оптических датчиков, дан анализ влияния различных факторов на характеристики датчиков и приведены принципиальные схемы построения электронных и оптических датчиков для решения различных промышленных, технологических и медицинских задач. Различие между активными и пассивными датчиками обусловлено различием принципов их функционирования, отражающих, в свою очередь, фундаментальные отличия: активные датчики сами являются генераторами информативного выходного сигнала различной физиче- ской природы, пассивные - имеют лишь информативное воздействие на процесс, в частности, через изменение удельного сопротивления изменяется сила электрического тока в проводнике или через изменение показателя преломления оптоволокна (световода) изменяются выходные характеристики светового потока. В активном пьезоэлектрическом датчике параметр измерения, в частности внешнее давление, воздействует на пьезоэлектрический элемент, что приводит к деформации и появлению на его гранях электрических зарядов противоположного знака, величина которых связана с измеряемым давлением. Световод может использоваться в качестве линии передачи информативного сигнала и/или чувствительного элемента, в частности, в виде участка световода с дифракционной решеткой Брэгга [2-6]; механолюминесцентный эффект использован в конструкциях датчиков [7]. В [8-11] представлены результаты теоретических и экспериментальных исследований по оценке механических свойств и деформаций полимерных композиционных материалов с помощью интегрированных в структуры материалов оптических волокон с решетками Брэгга. В [12] найдено распределение деформации по длине оптоволоконного датчика, и установлена минимально допустимая длина датчика для различных случаев нагружений в результате численного моделирования деформационных процессов в системе «подложка-клей-оптоволоконный датчик» в рамках линейной теории термовязкоупругости. Возможность измерения градиентных полей деформаций волоконнооптическими датчиками с решетками Брэгга продемонст- рирована в [13] на примере пластины с вырезами в сравнении с результатами, полученными при использовании трехмерной цифровой оптической системы, и с результатами численного моделирования методом конечных элементов. Оценки технологических деформаций в полимерных композиционных образцах с использованием внедренных волоконно-оптических датчиков с решетками Брэгга даны в [14]. Другим перспективным решением проблемы диагностирования неоднородных полей деформаций и наличия дефектов в элементах композитных конструкций являются сенсорные пьезоэлектрические сети [15–17], внедренные в структуру конструкции. Моделирование процессов в пьезоэлектрических чувствительных элементах датчиков проводится на основе решений соответствующих связанных краевых задач электроупругости аналитическими [18–21] или численными [22–26] методами механики сплошной среды. В [27–30] предложены новые конструкции пьезоэлектролюминесцентных оптоволоконных датчиков для уточненного диагностирования давления [27–29] и сложного объемного напряженно-деформированного состояния композитных конструкций [30] с использованием алгоритмов [28, 29] обработки приемником-анализатором интегральных оптических сигналов на выходе из световода датчика. Информативный световой сигнал возникает на локальном участке датчика в силу механолюминесцентного эффекта, обусловленного взаимодействием пьезоэлектрического и электролюминесцентного слоев датчика, и передается по световоду к приемнику-анализатору; наличие управляющих электродов позволяет диагностировать локации неоднородностей давления по длине датчика.
Цель – разработка математической модели импульсной локации неоднородностей давления по длине оптоволоконного пьезоэлектролюминесцентного датчика [27] с использованием локационного сканирующего электрического видеоимпульса на управляющих электродах по результатам замеряемой на торцевом сечении волоконного датчика интенсивности исходящего из оптоволокна света для различных моментов времени; для частного случая – сканирования предельно узким импульсом – получить аналитическое решение для диагностируемого неоднородного давления, что значительно упростит известный алгоритм [29] обработки светового сигнала на выходе из оптоволокна датчика.
1. Оптоволоконныйпьезоэлектролюминесцентный датчик
Датчик давления (рис. 1) [27–29] представляет собой составное слоистое волокно, состоящее из оптоволокна 1, электролюминесцентного 2 и с радиальной поляризацией пьезоэлектрического 3 цилиндрических концентрических слоев с внутренним фотопрозрачным, в частности, перфорированным или сеточным 4 и внешним 5 непрерывными управляющими электродами. Действие радиального напряжения (давления) а, на некотором локальном участке внешней боковой поверхности датчика приводит к соот- ветствующим деформациям участка пьезоэлектрического слоя 3 и появлению в нем и в смежном с ним локальном участке электролюминесцентного слоя 2 электрического поля, приводящего к свечению локального участка электролюминесцентного слоя внутрь (через фотопрозрачный электрод 4) оптоволокна 1; управляющие электроды 4, 5 с напряжением U упр дают возможность изменять, в част ности, однородно или неоднородно по длине датчика электрическое напряжение на электролюминесцентном слое 2 и как результат величину интенсивности света I на выходе из оптоволокна.
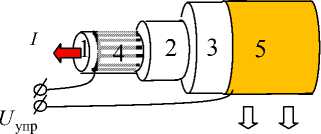
Рис. 1. Датчик давления а , с управляющим напряжением U упр и интенсивностью света I на выходе из световода Fig. 1. Sensor of pressure a , with the operating voltage U упр and intensity of light I at the exit from the light guide
2. Математическая модель сканирования
Рассмотрим процесс сканирования неоднородного давления a ( z ) по оси датчика z e (0; 1 ) локационным электрическим управляющим напряжением U упр ( z , t ) на электродах, которое представим в виде суммы некоторого постоянного по длине значения U 0 и локационного электрического видеоимпульса прямоугольной формы U 1 ( z , t ), распространяющегося в положительном направлении оси z .
U упр ( z , t ) = U 0 + U 1 ( z , t ) (1)
В произвольный момент времени t 1 e (0; T ) импульсная функция U 1 ( z , t 1 ) отлична от нуля и равна значению U 1 лишь на локальном участке l 1 с координатами z с ( z 1 - 1 1 / 2; z 1 + 1 1 /2) и длиной 1 1 с центром в точке z 1 = z 0 + ct 1 , где координаты начального и конечного положений центра импульса z 0 ^ 1 1 /2 и 1 - 1 1 /2 соответственно, координата z e (0; 1 ); длина электрода l ; время прохождения центром одиночного импульса от начального до конечного положений T = ( 1 - 1 1 )/ c ; скорость распространения импульса c .
Таким образом, для диагностики давления а,1 на участке l1 с центром z1 имеем (после проведенных в n циклах диагностики замеров интенсивностей света на выходе оптоволокна) функцию I = I(Uупр1), заданную через узловые значения интенсивности света I(k) ^ I (tk) на выходе оптоволокна и управляющего напряжения на участке 11 Uупр1(k) = U0 + U1(k), где моменты времени прохождения импульсом этого участка tk = (z1 - z 0) / c + (k - 1)T. Однородная составляющая U0 и величина импульса Uцk) =-U1 a + A U1(k -1) постоянны в течение каждого цикла k = 1, n диагностики и варьируются, в частности увеличиваются на некоторую малую величину AU1 лишь при начале следующего цикла для случая U1 е [-U1 a; U1 a ], где минимальное и максимальное значения U1(1,n) = + U1 a; амплитуда импульса U 1 a > 0; n - число циклов диагностики.
Рассмотрим вероятностную модель, в которой распределение действующего на боковую цилиндрическую поверхность волоконного датчика внешнего давления а ( z ) по координате z описываем непрерывной случайной величиной а , , реализациями которой являются различные значения действующего давления а ( z ), где z е (0; 1 ); аналогично для случайной величины о 1 , реализациями являются различные значения а ( z ) на соответствующем локальном участке z е 1 1 датчика. Электрическое напряжение на электролюминесцентном локальном участке l 1 датчика
U 1 , = an упр1 + a 2 ^ 1 . (2)
также является случайной величиной, связанной с давлением о1, параметрами датчика a1, a2. Найдем функции плотности f, (Z1) распределения этого давления а1, по анализу интенсивности света I на выходе из оптоволокна датчика. Считаем, что свойства электролюминесцентного элемента заданы «S-образной» кривой зависимости интенсивности свечения I = I (U) от приложенного напряжения U с характерными точками заданных пороговых напряжений: Umin для начала свечения и Umax для начала насыщенного свечения электролюминесцентного элемента (рис. 2).
Алгоритм расчета функции плотности распределения f 1 , ( Z 1 ) давления на локальном участке оптоволоконного датчика рассмотрен в [29], согласно которому искомая функция f , ( Z 1 ) является решением интегрального уравнения Фредгольма 1-го рода
-A-= a l У/х й ) d U упр1 1 ^min \
V f . ( Z 1 ) d Z 1 , I U = a 1 U упр1 + a 2 ^ 1
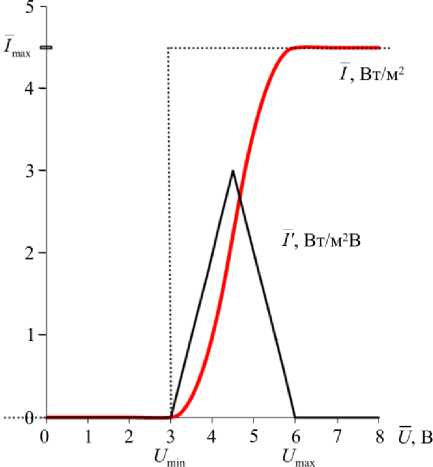
Рис. 2. Заданная функция I и производная I ' интенсивности свечения электролюминесцентного элемента от значений приложенного напряжения U
Fig. 2. The set function I and derivative I ' of luminescence intensity of the electroluminescent element on the values of the enclosed voltage U
где границы интегрирования
Z 1min =Z 1 (0) = ( U (0) - ^U упр1 ) / a 2 ,
1max
Z 1 ( I max ) ( U ( I max ) a 1 U упр1 ) / a 2
-
с учетом (2). В каноническом виде интегральное уравнение Фредгольма (3) имеет вид
smax f (x) = j K (x - 5)y(5)ds ,(5)
smin где разностное ядро nJ, —
K(x - s) = -111'(x - s)(6)
a2l с учетом новых переменных x = a1Uупр1 , s = -a2z1, известная f (x) ^
' dI vd U упр1
с учетом (7) и иско-
I U упр1 = x / a 1
мая y ( s ) ^ f 1 , ( Z 1 )i функции, границы интегрирова- 1 5 1 =- s / a '2
ния: smin = x - U(Imax ) , smax = x - U(0) или smin ^ Z , smax = x с учетом (4), U(0) = 0 , U(Imax) ^ ” . Различные аналитические и численные методы решения интегральных уравнений Фредгольма (5) даны в [31–35]. В частном случае, когда зависимость I = I (U) - ступенчатая функция (пунктирная линия на рис. 2), произ- водная в ядре (6) уравнения (5) выражается
I '(U ) = I max 8(U - U min ) через дельта-функцию Дирака и из (3) получим решение для искомой функции плотности распределения
I U упр1 = ( U min - a 2 ^ 1)/ a 1
где константа к 1 - a 2 /( a11 1max); максимальная интенсивность свечения 1 1max ^ I max 1 1 / 1 участка электролюминесцентного элемента оптоволоконного датчика длиной l 1 .
Для случая, когда на рассматриваемом участке z' e 11 диагностируемое давление a1e = const или когда ширина l1 сканирующего импульса является предельно малой величиной (11 = Az -^ l) и давление CT1, (z') ® const для z' e (z; z + Az), функция плотности распределения вырождается к виду f,(Z1 )=5(Z1 -Q1.) (9)
и из интегрального (3), (5) получим алгебраическое уравнение aa=arI '(U)- , (10)
d U упр1 1 U = aU упр1 + a 2 ° 1 *
функция интенсивности свечения I на выходе из оптоволокна
l
I U упр1 ) = 1 0 + 7 1 U )| , (11)
1 U=aU упр1+ a 2^1, где Iо = 10(Uо) обусловлено возможным свечением участка 10 = 1 \ 11. В частности, значение U0 в (1) может быть подобрано из условия I0 = 0 отсутствия свечения на выходе из световода в отсутствие импульса. В результате получим искомое решение для величины диагностируемого давления ab=( I-1(Л) - axU) / a 2, (12)
где I -1 - функция, обратная известной I = I (U ) (см. рис. 2) величина
Л 1 ( I (U упр1 ) - I о ) (13)
l 1
выражается через экспериментально измеренную интенсивность I(Uупр1) для соответствующего значения управляющего напряжения Uупр1 . Отметим, что в (12) CT1, = ст. (z) - это давление в малой окрестности внешней границы сечения датчика с координатой z ; величина Л рассчитывается через интенсивность света I на выходе из световода в момент времени t = 2z / c, где c – скорость распространения электрического импульса (света), начальный момент времени t = 0 соответствует моменту входа импульса в датчик.
-
3. Области допустимых значений параметров управляющего напряжения
Для диагностики оптоволоконным датчиком значений давления ст , из всего рабочего диапазона ( CT min; CT max) необходимо выполнение условий: во-первых, минимальное значение управляющего сигнала U упр(min) должно приводить к прекращению свечения ( U , ^ U min) даже на участке, где действует максимальное давление CT max , и, во-вторых, максимальное значение управляющего сигнала U упр(max) должно приводить к максимальному «насыщенному» свечению ( U , > U max ) даже на участке, где действует минимальное давление CT min. Эти условия с учетом того, что напряжение на электролюминесцентном элементе, например на участке l 1 действия импульса, имеет вид U , 1 ( t ) = a 1 U упр1 ( t ) + a 2 ст , 1 (2), запишем как систему неравенств
I a1U упр1(min) + a 2 CT 1(max) ^ U min , (14)
[ a1Uупр1(max) + a2CT1(min) ^ Umax с использованием заданных пороговых напряжений Umin для начала свечения и Umax для начала насыщенного свечения электролюминесцентного элемента. Для случая, когда величина импульса U1 e (-U1 a; U1 a), систему (14) преобразуем к виду
I a 1 ( U 0(min) - U 1 a ) + a 2 CT 1(max) ^ U min , (15)
I a1 (U0(max) + U1 a ) + a2CT1(min) ^ Umax с учетом равенств Uупр1(min) = U0(min) - U1 a, UуПр1(max) = = U0(max) + U1 a (1), амплитуды импульса U1 a > 0 и допуская для общего случая вариации однородной составляющей управляющего напряжения U0 на интервале значений (U0(min);U0(max)). Таким образом, область допустимых значений параметров управляющего сигнала найдем из решения системы
U 0(min) - U 1 a ^ b 1 ,
' U 0(max) + U 1 a ^ b 2 , (16)
U1 a ^ 0, где коэффициенты b1 = (Umin - a2CT1(max) ) / a1, b2 = ( Umax - a2 CT1(min) ) / a1 (17)
с учетом того, что a12 > 0 .
Для случая, когда U 0 = const, в (15), (16) полагаем равенства и 0( mi n) = и 0(max) = и 0 :
U 0 - U 1 a ^ b l ,
^ U 0 + U 1 a У b 2 ,
U 1 a У 0.
В частности, при U 0 = 0 амплитуда импульса выбирается из области допустимых значений (16)
U 1 a У - b 1 ,
1 U 1 a У b 2 , (19)
. U 1 a У 0.
Для случая, когда U 1 a = 0 импульс отсутствует, область допустимых значений границ U 0(min) , U 0(max) для варьирования величины однородной составляющей управляющего напряжения U 0 находим из системы
U 0(min) ^ b1 ,
U 0(max) У b 2 .
4. Результаты численного моделирования
Численный расчет области допустимых значений параметров: U 0 , U 1 a управляющего напряжения на рис. 3 проведен (18) для значений границ: Hu mi n) = 70кПа, ст 1 ( max ) = 80 кПа действующего на участке 1 1 давления а 1 е , пороговых напряжений для начала U min = 3 В и насыщенного U max = 6 В свечений электролюминесцентного элемента (см. рис. 2), параметров датчика a 1 = 0,972, a 2 = 0,235 - 10 — 4 В/Па [28, 29] и рассчитанных значений коэффициентов Ь 1 « 1,152 В, b 2 ® 4,480 В (17). Вертикальным красным отрезком на рис. 3 обозначены допустимые значения U 1 a У b 2 амплитуды импульса для случая (19) отсутствия ( U 0 = 0) однородной составляющей в управляющем напряжении (1).
На рис. 4, а построены зависимости интенсивности света I = I(Uупр1) (с учетом I0 (0) = 0 , где интенсивность свечения I0 = I0(U0) участка 10 = 1 /11, который светится лишь при значении U0 > U1 = 0,91 В) и производной I' = dI / dUупр1 на выходе из оптоволокна от управляющего напряжения Uупр1 при заданном равномерном законе распределения f1, (Z1) действующего давления о1е е (ст '1; ст '2) на участке 11 в границах ст '1 = 70кПа, ст '2 = 80 кПа с параметрами датчика a1 = 0,972, a2 = 0,235 -10-4 В/Па, относительной длиной 11 /l = 0,01 участка 11. Значение амплитуды им пульса U1 a = 5 В (U0 = 0) было выбрано с учетом области допустимых значений параметров управляющего напряжения (см. рис. 3). Пунктирные графики (см. рис. 4, а) зависимостей интенсивности света I и производной I ' от управляющего напряжения Uупр1 на участке 11 построены для случая, когда функция I = I (U) задана в виде ступенчатой функции (см. рис. 2) с параметрами Imax = 4,5 Вт/м2, Umin = 3В.
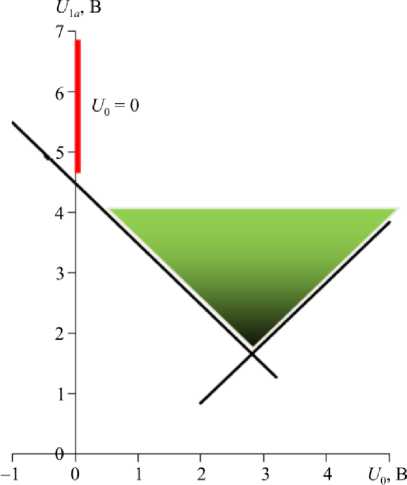
Рис. 3. Область допустимых значений параметров
U 0 , U 1 a управляющего напряжения
Fig. 3. Domain of admissible values of parameters:
U 0 , U 1 a of operating voltage
На рис. 4, б для случая наличия лишь однородной по длине датчика составляющей варьируемого управляющего напряжения U 0 в отсутствие импульса ( U 1 a = 0) построены зависимости интенсивности света I и производной I ' = dI / dU 0 (5) на выходе из оптоволокна от управляющего напряжения U 0 при заданном равномерном законе распределения f , ( Z ) действующего давления ст , е ( ст 1 ; ст 2) по всей длине 1 в границах ст 1 = 30 кПа, ст 2 = 90кПа. Допустимые значения границ U 0(min) , U 0(max) варьирования величины управляющего напряжения U 0 е ( U 0 ( min ) ; U 0 ( max ) ) найдены из решения (20). Пунктирные графики на рис. 4, б рассчитаны для случая, когда функция I = I (U ) задана в виде ступенчатой функции (см. рис. 2). Граничные значения давлений ст 1 2 связаны с соответствующими характерными значениями U 1,2 управляющего напряжения U 0 зависимостью ст 1 2 ^ ( U min - a 1 U 2 1 ) / a 2 с учетом (2); для рассматриваемого случая (см. рис. 4, б) имеем значения U 1 = 0,91 В, U 2 = 2,36 В.
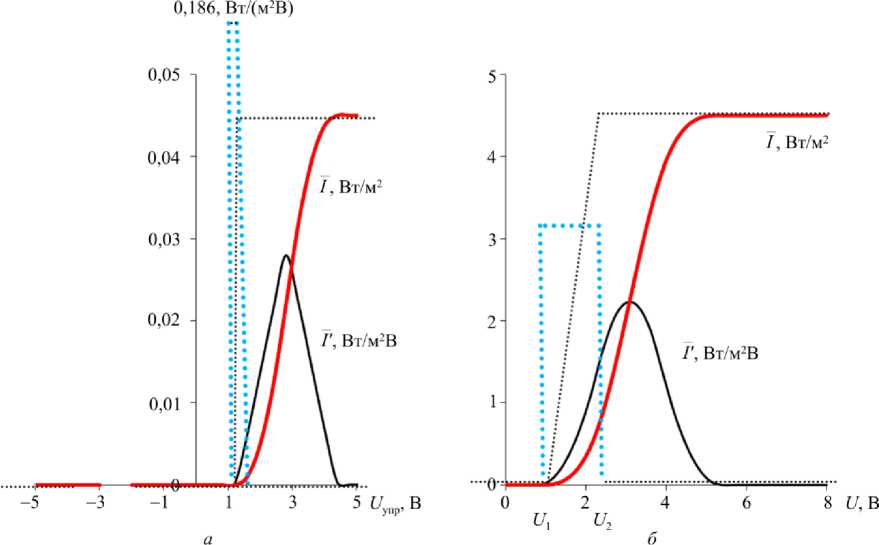
Рис. 4. Рассчитанная функция свечения I из оптоволокна и производная I' для диагностирования давления на локальном участке ( а ) и по всей длине ( б ) датчика
Fig. 4. The calculated function of luminescence I from optical fiber and derivative I' for diagnosing of pressure on the local segment ( а ) and along the whole length ( b ) of the sensor
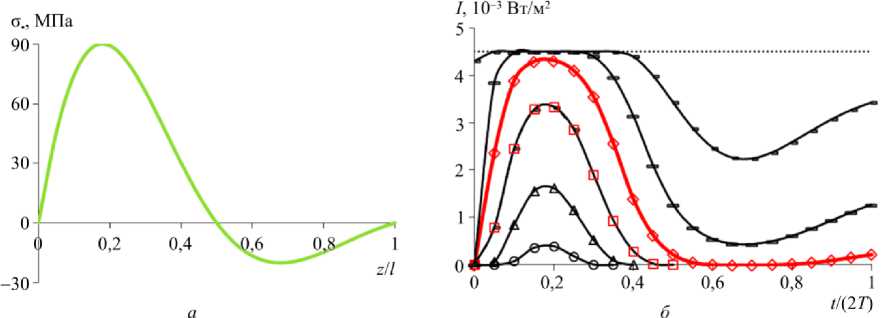
Рис. 5. Распределение давления а . ( z ) ( а ) и функция свечения I из оптоволокна для различных величин U упр1 электрического импульса сканирования ( б ) Fig. 5. Distribution of pressure а . ( z ) ( а ) and luminescence function I from
the optical fiber for various values U упр1 of an electric impulse of scanning ( b )
Для неоднородного распределения давления а . ( z ) (рис. 5, а ) были решены прямая (11) и обратная (12), (13) задачи для заданной на рис. 2 функции I ( U ) свечения, где время T = 1 / c прохождения импульсом всей длины 1 = 1м датчика со скоростью c = 3 - 10 8 м/с, ширина импульса 1 1 = 1 мм, начальный момент времени t = 0 соответствует моменту входа импульса в датчик, момент выхода t света из световода. В прямой задаче найдены (рис. 5, б ) функции свечения I ( t ) на выходе из оптоволокна для различных численных значений:
U упр1 = 1,576В (о), 2,241В (А), 2,907В (□), 3,572В (◊), 4,244 В ( □), 5,106 В (а) электрического импульса сканирования; предел насыщенного свечения наступает при значении U упр1 = 6,658 В (пунктирная линия). В обратной задаче найдено распределение давления а . ( z ) (см. рис. 5, а ) по значениям функции интенсивности свечения I ( t ), в частности для значения управляющего напряжения U упр1 = 3,572 В (◊), для которого отсутствуют «неинформативные зоны» из участков с «нулевыми» ( I = 0 ) и «насыщенными»
( I = c 1 I max) значениями интенсивности свечения I ( t ) (см. рис. 5, б ), где относительная ширина импульса c 1 = l 1/ l . Отметим, что если для некоторого значения U упр1 есть неинформативные зоны для функции интенсивности свечения I ( t ), то необходимо дополнительно провести измерения I ( t )для другого значения U упр1 уже с информативными участками в этих зонах, в частности взаимодополняющие графики (□), ( ) на рис. 5, б . Таким образом, сканирование неоднородного давления σ• ( z ) предельно узким видеоимпульсом позволяет получить аналитическое решение (12), что значительно упрощает известный алгоритм [29] обработки светового сигнала на выходе из оптоволокна.
Заключение
Разработаны алгоритм и математическая модель локации неоднородностей давления по длине l оптоволоконного пьезоэлектролюминесцентного датчика с использованием локационного сканирующего электрического видеоимпульса U 1 с пошаговым изменением величины импульса U 1 на каждом цикле прохождения исследуемого локального участка l 1 ⊂ l . Показано, что расчет функции плотности f 1 • ( ζ ) распределения давления σ 1 • на локальном участке внешней боковой цилиндрической поверхности оптоволоконного датчика по результатам замеряемой на торцевом сечении датчика интенсивности света из оптоволоконной фазы для случая нелинейной зависимости I = I ( U ) интенсивности света I от действующего на электролюминесцентный элемент напряжения U (см. рис. 2) сводится к решению интегрального уравнения Фредгольма 1-го рода (5) с разностным ядром K ( x - s ) (6), зависящим от передаточных коэффициентов a 1 , a 1 датчика, относительной длины l 1 / l исследуемого локального участка l 1 и производной I '( U ) (см. рис. 2) заданной функции свечения электролюминесцентного элемента.
Список литературы Математическая модель импульсного сканирования давления по длине пьезоэлектролюминесцентного оптоволоконного датчика
- Козлов В.Л. Оптоэлектронные датчики. -Минск: Изд-во Белорус. гос. ун-та, 2005. -116 с.
- Окоси Т. Волоконно-оптические датчики. -Л.: Энергоатомиздат, 1990. -256 с.
- Guemes A., Fernandez-Lopez A., Soller B. Optical fiber distributed sensing -physical principles and applications//Structural Health Monitoring. -2010. -Vol. 9. -No. 3. -P. 233-245.
- Suresh R., Tjin S.C., Hao J. Fiber Bragg Grating//Smart Materials in Structural Health Monitoring, Control and Biomechanics. -Berlin: Springer, Heidelberg, 2012. -P. 413-439.
- Prabhugoud M., Peters K. Efficient simulation of Bragg grating sensors for implementation to damage identification in composites//Smart Materials & Structures. -2003. -Vol. 12. -No. 6. -P. 914-924.
- Методы исследования свойств материалов при интенсивных динамических нагрузках/под общ. ред. д-ра физ.-мат. наук М.В. Жерноклетова; ФГУП РФЯЦ-ВНИИЭФ. -Саров, 2003. -403 с.
- Татмышевский К.В. Механолюминесцентный чувствительный элемент: математическая модель и динамические свойства//Приборы и системы. Управление, контроль, диагностика. -2005. -№ 4. -С. 35-39.
- Матвеенко В.П., Федорова В.А., Шардаков И.Н. Теоретическое обоснование возможности построения волоконно-оптической системы мониторинга деформаций земной поверхности//Изв. РАН. МТТ. -2013. -№ 5. -С. 46-52.
- Шардаков И.Н., Созонов Н.С., Цветков Р.В. Экспериментально-теоретические основы автоматизированных систем деформационного мониторинга с использованием волоконно-оптических элементов//Вестн. Перм. науч. центра. -2016. -Окт.-дек. -С. 91-95.
- К вопросу об интеграции оптоволокна в ПКМ и измерении деформации материала с помощью волоконных брэгговских решеток/М.А. Зуев, В.В. Махсидов, М.Ю. Федотов, А.М. Шиенок//Механика композиционных материалов и конструкций. -2014. -Т. 20, № 4. -С. 568-574.
- Применение оптического волокна в качестве датчиков деформации в полимерных композиционных материалах/Е.Н. Каблов, Д.В. Сиваков, И.Н. Гуляев, К.В. Сорокин, М.Ю. Федотов, Е.М. Дианов, С.А. Васильев, О.И. Медведков//Все материалы. Энцикл. справ. -2010. -№ 3. -С. 10-15.
- Наймушин И.Г., Труфанов Н.А., Шардаков И.Н. Численный анализ деформационных процессов в оптоволоконном датчике//Вестник Пермского национального исследовательского политехнического университета. Механика. -2012. -№ 1. -С. 104-116.
- Измерение неоднородных полей деформаций встроенными в полимерный композиционный материал волоконно-оптическими датчиками/А.Н. Аношкин, А.А. Воронков, Н.А. Кошелева, В.П. Матвеенко, Г.С. Сероваев, Е.М. Спаскова, И.Н. Шардаков, Г.С. Шипунов//Изв. РАН. МТТ. -2016. -№ 5. -С. 42-51.
- Матвеенко В.П., Шардаков И.Н., Кошелева Н.А. Оценка технологических деформаций в полимерных композиционных образцах на основе использования внедренных волоконно-оптических датчиков деформаций//XХ Зимняя школа по механике сплошных сред: тез. докл./РИО УрО РАН. -Пермь, 13-16 февраля 2017 г. -Екатеринбург: 2017. -С. 219.
- Patent US 20060254366 A1. Sensor and sensor array for monitoring a structure/Caroline Williamson, Lisa Fixter (nee Humberstone), Andrew Clarke; published on November 16, 2006.
- Patent US 7458266 B2. Method and apparatus for detecting a load change upon a structure and analyzing characteristics of resulting damage/Shawn J. Beard, Xinlin Qing, Hian Leng Chan, Chang Zhang, Fuo-Kuo Chang; published on December 2, 2008.
- Patent US 6399939 B1. Sensor array system/Mannur J. Sundaresan, Anindya Ghoshal, Mark J. Schulz; published on June 4, 2002.
- Гринченко В.Т., Улитко А.Ф., Шульга Н.А. Электроупругость. -Киев: Наукова думка, 1989. -280 с.
- Партон В.З., Кудрявцев Б.А. Электромагнитоупругость пьезоэлектрических и электропроводных тел. -М.: Наука, 1988. -472 с.
- Дианов Д.Б., Кузьменко А.Г. Расчет цилиндрического пьезокерамического преобразователя, совершающего радиально-симметричные колебания//Акуст. журн. -1970. -Т. 16, № 1. -С. 42-48.
- Шляхин Д.А. Нестационарная осесимметричная задача электроупругости для анизотропного пьезокерамического радиально поляризованного цилиндра//Изв. РАН. МТТ. -2009. -№ 1. -С. 73-81.
- Finite Element Analysis of Functionally Graded Piezoelectric Spheres/A. Ghorbanpour Arani, R. Kolahchi, A.A. Mosalaei Barzoki, A. Loghman, F. Ebrahimi//Finite Element Analysis -Applications in Mechanical Engineering. Ed. Farzad Ebrahimi. -InTech, 2012. -380 p.
- Numerical determination of effective properties of voided piezoelectric materials using BNM/H. Wang, G. Tan, S. Cen, Z. Yao//Engineering Analysis with Boundary Elements. -2005. -Vol. 29. -P. 636-646.
- Li Z.H., Wang C., Chen C.Y. Effective electromechanical properties of transversely isotropic piezoelectric ceramics with microvoids//Comput. Mater. Sci. -2003. -Vol. 27. -No. 3. -P. 381-392.
- Bishay P.L., Dong L., Atluri S.N. Multi-physics computational grains (MPCGs) for direct numerical simulation (DNS) of piezoelectric composite/porous materials and structures//Computational Mechanics. -2014. -Vol. 54. -No. 5. -P. 1129-1139.
- Kondaiah P., Shankar K., Ganesan N. Pyroeffects on multiphase magneto-electro-elastic sensor patch bonded on mild steel plate//International Journal on Smart Sensing and Intelligent Systems. -2014 September. -Vol. 7. -No. 3. -P. 1134-1155.
- Пат. РФ № 2630537. Волоконно-оптический датчик давления/Паньков А.А., опубл. 11.09.2017 г.; заявка RU № 2016136058 от 06.09.2016 г.
- Паньков А.А. Математическое моделирование пьезоэлектролюминесцентного эффекта и диагностика распределения давления по длине оптоволоконного датчика//Вестник Пермского национального исследовательского политехнического университета. Механика. -2016. -№ 4. -С. 259-272.
- Pan’kov A.A. Piezoelectroluminescent optical fiber sensor for diagnostics of the stress state and defectoscopy of composites//Mechanics of Composite Materials. -2017. -Vol. 53. -No. 2. -P. 229-242.
- Пат. РФ № 2643692. Волоконно-оптический датчик объемного напряженного состояния/Паньков А.А., опубл. 05.02.2018 г.; заявка № 2017111405 от 04.04.2017 г.
- Михлин С.Г., Смолицкий X.Л. Приближенные методы решения дифференциальных и интегральных уравнений. -М.: Наука, 1965. -384 с.
- Верлань А.Ф. Сизиков В.С. Интегральные уравнения: методы, алгоритмы, программы. -Киев: Наук. думка, 1986. -543 с.
- Васильева А.Б., Тихонов А.Н. Интегральные уравнения. -М.: Физматлит, 2002. -360 с.
- Полянин А. Д., Манжиров А. В. Справочник по интегральным уравнениям. -М.: Физматлит, 2003. -608 с.
- Латыпов А.Ф. Численные методы решения линейных интегральных уравнений Фредгольма и Вольтерра 1-го рода//Обратные и некорректные задачи математической физики: материалы междунар. конф., посвященной 75-летию академика М.М.Лаврентьева, 20-25 августа 2007 г. -Новосибирск, 2007.
