Математическая модель кинематического расчета плоских рычажных механизмов

Автор: Васечкин М.А., Матвеева Е.В., Сидоренко А.С., Чертов Е.Д.
Журнал: Вестник Воронежского государственного университета инженерных технологий @vestnik-vsuet
Рубрика: Информационные технологии, моделирование и управление
Статья в выпуске: 2 (72), 2017 года.
Бесплатный доступ
На этапе проектирования плоских рычажных механизмов обязательно проводится кинематический расчет. Это операция очень трудоемка и содержит много вычислений. Поэтому является актуальным разработка математической модели в форме расчета кинематических характеристик любых плоских рычажных механизмов, имеющих в своем составе кроме начального звена хотя бы одну двухповодковую группу Ассура. В работе рассмотрены задачи построения математических процедур для групп Ассур пяти видов. В качестве исходных данных используются начальные координаты положения шарниров и кинематические характеристики ведущего звена. В ходе математического моделирования для исследуемой группы Ассура были записаны уравнения движения шарниров в проекциях на глобальные оси координат плоскости. Дважды продифференцировав уравнения движения были получены уравнения для определения скорости и ускорения шарниров в проекциях на глобальные оси координат. После ряда преобразований полученных уравнений в матричной форме записаны выражения для определения кинематических характеристик ведомых звеньев рассматриваемой группы Ассура. Получены математические процедуры для определения кинематических характеристик для каждой двухповодковой группы Ассура. При структурном анализе более сложного плоского механизма, состоящего из ведущего звена и нескольких двухповодковых групп Ассура, последовательно обращаясь к соответствующей процедуре можно определить кинематические характеристики всех звеньев исследуемого механизма. Для полученных математических процедур может быть легко разработано программное обеспечение в виде подключаемой библиотеки, что позволит ускорить выполнение расчетных работ при проектировании сложных плоских механизмов.
Математическая модель, кинематический расчет, группы ассура, аналог скорости, аналог ускорения
Короткий адрес: https://sciup.org/140229839
IDR: 140229839 | DOI: 10.20914/2310-1202-2017-2-73-79
Mathematical model of kinematic calculation of flat lever mechanisms
Kinematic calculation is a mandatory part of the design of the flat lever mechanisms. This operation is very time-consuming and always need many calculations. Therefore, it is important to develop mathematical models for calculating the kinematic characteristics of the flat lever mechanisms, containing at least one double-leash Assur group. The article is devoted to mathematical modeling of five types of the Assur groups. The initial pin joint position and the driving ring kinematic characteristics used as an input for the further calculations. For the selected Assur group created the equation of motion in plane coordinates axis for the pin joints. With double differentiating the equations of motion were derived equations for determining velocity and acceleration of the pin joints in the global axes projections. The result of several transformations in matrix forms is the equations for the kinematic characteristics of the slave units in the selected Assur group. Finally, mathematical procedures for the kinematic characteristics of each double-leash Assur group were calculated. In a structural analysis of the complex planar mechanisms with a leading link and several double-leash Assur groups it is possible to determine the kinematic characteristics of all parts by consistently addressing the appropriate procedure. All suggested algorithms implemented as a software library that will speed up the designing of the complex planar mechanisms.
Текст научной статьи Математическая модель кинематического расчета плоских рычажных механизмов
На этапе проектирования плоских рычажных механизмов обязательно проводится кинематический расчет. Это операция очень трудоемка и содержит много вычислений. Поэтому является актуальным разработка математической модели
в форме процедур расчета кинематических характеристик любых плоских рычажных механизмов, имеющих в своем составе кроме начального звена хотя бы одну двух поводковую группу Ассура [1–3].
Разработка математической модели
Рассмотрим группу Ассура первого вида.
Положения звеньев данной группы Ассура определим с помощью рисунка 1, в котором представлена схема группы в соответствующей системе координат; обозначения звеньев и кинематических пар [4, 5]. Назовем конфигурацию групп сборкой № 1 когда координата точки В в локальной системе координат х 1 о 1 у 1 B y 1 > 0, в противном случае мы имеем сборку № 2. Известны координаты точек А, С в абсолютной системе координат, длины звеньев l 2 и l 3 и необходимо определить абсолютные координаты точки В, углы ф 2 и ф 3 . Расстояние АС определим по теореме Пифагора
АС — ^( С х - А х ) + ( С у - А у ) .
Угол α определим по формуле t f СУ - Ау) а = arctan —--- , f B - А ) v Bx - Ах J f B - C Л
Затем определяем углы наклона звеньев 1 2 , 1 з - Ф 2 и Ф 3
m t f By - Ау )
Ф — arctan;
2 I Bx - Ах J f B - C )
Ф3 — arctan —---
Для определения аналогов скоростей воспользуемся методом замкнутых векторных контуров и напишем проекции векторного уравнения на координатные оси
Ax + 1 2 cos ф 2 = Cx + 1 3 cos ф 3 ;
A y + 1 2 sin ф 2 — Cy + 1 3 sin ф 3.
Продифференцируем полученные уравнения по обобщенной координате ф1. Учитывая, что нам известны значения аналогов скоростей точек А и С (Vax, Vay, Vcx, Vcy), а также значения углов φ2, φ3 получим линейную систему двух уравнений а для определения локальных координат Вх1 и Ву1, воспользуемся теоремой косинусов и теоремой Пифагора. Учитывая, что
B x i = 1 2 соs Z BAC, получаем
<у 2 1 2 sin to 2 - m 3 1 3 sin m 3 = Va x - Vc x ;
^Lcos^ - mkcosm = Vc^, - Va,,, yy
B x 1 =
1 22 + AC 2 - 1 32 _
2 AC ;
Здесь необходимо отметить, что если конфигурация группы Ассура соответствует сборке № 2, то B y 1 = – B y 1 . Теперь можно определить абсолютные координаты точки В, используя метод преобразования координат:
B x — A x + B x 1 cos a - B y 1 sin a ;
B y — A y + B x 1 sin a - B y 1 cos a .
где неизвестными являются аналоги скоростей m 2, (У3. Решение данной системы линейных уравнений проведем методом Крамера. В этом случае представляем уравнения в виде
а11 Ю 2 + а12 ® 3 b i.
;
a 2i ® 2 + a 22 ® 3 — b 2 ,
где коэффициентами a 11 , a 12 , a 21 , a 22 , b 1 , b 2 представлены следующие постоянные, известные нам по значениям, выражения:
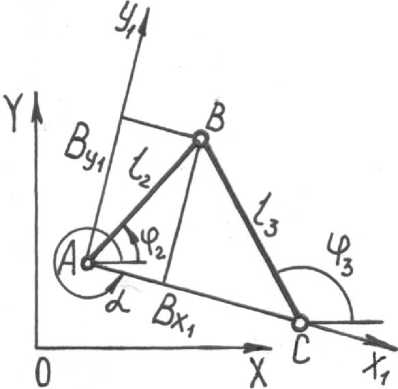
Рисунок 1. Расчетная схема группы Ассура первого вида
Figure 1. Settlement schemes of two flood groups of Assur first look
a n — - ^sin^. au — 13sin ф ; ;
b i — Vcx - Vax. a 21 — 1 2 cos Ф 2 ;
;
a 22 — - 1 3 cos ф 3 ; b 2 — Vc y - Va y .
Тогда
b 1 a 12
b 2 a 22
|
2 |
a 11 |
a 12 |
|
a 21 |
a 22 |
a 11 b 1
a 21 b 2
|
3 |
a 11 |
a 12 |
|
a 21 |
a 22 |
Для получения аналогов ускорений дважды продифференцируем уравнения (1) по φ 1 :
Aa x - о 22l2cosф2 - e 2 1 2sinф2 — Ac x
-
- ю 2 l3cosф3 - e3 1 3sinф3
;
Aa y - ® 2 1 2 sin ф 2 - 8 2 1 2 cos ф 2 — Ac y
-
-m 2 1 3 sin ф 3 - 8 3 1 3 cos ф 3
Преобразуем полученные выражения к виду (3)
^11^2 + ai2^3 = b; a21^2 + a2263 = b2, где коэффициенты a11, a12, a21, a22 сохраняют свои старые значения, а b1 и b2 определяются по следующим зависимостям:
b i = Ac x — Aa x + a 21 ^ 2 + a 22 ^ 3 ;
b 2 = Ac y — Aa y + a 11 ^ '2 + a 1. ^ 3 .
В этом случае, аналоги ускорений
S u и s 3 будут равны:
|
E 2 |
b 1 b 2 |
a 12 a 22 |
; ^3 |
a 11 a 21 |
b 1 b 2 |
. (5) |
|
a 11 |
a 12 |
a 11 |
a 12 |
|||
|
a 21 |
a 22 |
a 21 |
a 22 |
Рассмотрим группу Ассура второго вида.
Схема данной группы Ассура, координатная система и обозначения кинематических пар и звеньев представлены на рисунке 2 [5]. Вычислим координаты точки А в локальной системе координат Х 1 СY 1
C x + A x 1 co ^ — A y 1 si ^ = A x ;
Cy + A x 1 sin ^ — A y 1 cos ^ 3 = A y
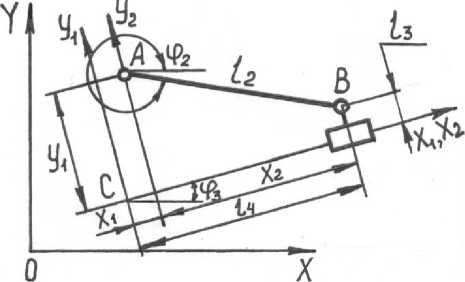
Рисунок 2. Расчетная схема группы Ассура второго вида
Figure 2. Settlement schemes of two flood groups of Assur second look
В выражении (6) нам известны абсолютные координаты точек А и С, а также угол наклона направляющей для поступательной пары группы - ф 3. К числу неизвестных, подлежащих определению, относятся координаты точки А в локальной системе координат Х 1 СY 1 . Перенеся С х , и С у в правую часть, получим линейную систему двух уравнений, решение которой представим в виде:
b 1 — sin ф 3
b2
cos ф 3 — sin ф 3
sinф3cos
A y 1 =
cos ф 3 b 1
sinф3b cosф3 — sinф3 sinф3 cosф3
Здесь b 1 = A x – С x и b 2 = A y – C y . Так как определители знаменателей в (7) равны 1, то значения неизвестных равны значениям определителей, расположенных в числителях
A x 1 = b 1 cos ф 3 — b 2 sin ф 3;
A y 1 = b 2 cos ф 3 — b 2 sin ф 3.
Далее определяем х 2 – проекцию звена 2
на направляющую x2
а затем и длину направляющей СВ l 4 = A x 1 + x 2 .
Абсолютные координаты точки В и угол наклона звена l2 определяем по следующим выражениям:
Bx = C x + 1 4 cos ф 3 — 1 3 sin ф 3;
B y = C y + 1 4 sin ф 3 — 1 3 cos ф 3 ;
m t f B y — A y 1 ^ = arctan —---- .
V B x A x 7
Для определения аналогов скоростей напишем проекции замкнутых векторных контуров на координатные оси X и Y
1 2 cos ф 2 -1 4 cos ф 2 = C x - Ax + 1 3 sin ф 3 ;
2242 xx 33 (9)
1 2 sin ф 3 -1 4 sin ф 3 = C y — A y + 1 3 cos ф 3 .
Произведя дифференцирование данной системы уравнений по φ 1 и простейшие преобразования, получим линейную систем уравнений, в которой неизвестными являются ω 1 и V 4
— ш 21 2 sin ф 2 - V4cos ф 3 = Vcx
— V — < » 3 ( l3cos ^ + 14sin ^ )
;
ro 21 2 cos ф 2 - V4sin ф 3 = Vcy
-Vay - to 3 ( 1 3 sin ф 3 + 1 4 cos ф 3 ) .
Решение данной системы уравнений получим в виде
|
0 2 |
b 1 b 2 |
a 12 |
; V 4 =- |
a 11 a 21 |
b 1 b 2 |
, (11) |
|
a 11 |
a 12 |
a 11 |
a 12 |
|||
|
a 21 |
a 22 |
a 21 |
a 22 |
где a11 = -12sinф2; a12 = 13sinф3;
b1 = Vc x - Va x + O 3 ( 1 4 a 22 + 1 3 a 12 ) ;
(12) a 21 = 1 2 cos ф 2 ; a 22 = - 1 3 cos ф 3 ;
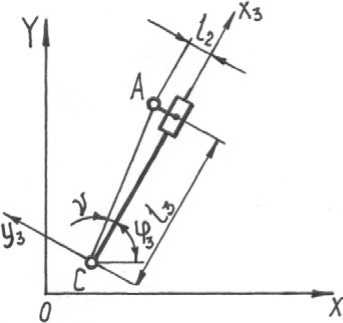
Рисунок 3. Расчетная схема группы Ассура третьего вида
Figure 3. Settlement schemes of two flood groups of Assur third look
b 2 = Vc y - Va y - O 3 ( 1 4 a 22 - 1 3 a 12 ) .
Дважды продифференцировав (9) и проведя небольшие преобразования, получим значения аналогов ускорений ε 2 и A 4
b1 = Ac x - Aa x - 0 3 ( 1 4cosф3 -l3sinф3 )
+0 2 1 2 cos ф 2 - 2V4o3 sin ф 3
Запишем проекции векторных уравнений замкнутых контуров на оси координат X, Y в следующем виде:
1 3 cos ф 3 - 1 2 sin ф 3 = A x - C x ;
1 3 sin ф 3 - 1 2 cos ф 3 = A y - C y .
Продифференцировав (17) по ф i, получим, после небольших преобразований, систему уравнений aiiV3 + ai2O3 = bi; a21V3 + a22O3 = b2, (18)
где a11 = cosф3; b1 = Vax - Vcx;
a 12 = - ( 1 3 sin ф 3 + 1 2 cos ф 3) ;
a 21 = sin ф 3 ; b 2 = Va y - Vc y ;
- ^ ( 14sin ^ + 13cos ^ )
;
b 2 = Ac y - Aa y - 0 2 ( 1 4 sin ф 3 - 1 3 cos ф 3 ) ( )
a 22 = 1 3 cos ф 3 - 1 2 sin ф 3 .
+0 2 1 2 sin ф 2 - 2V4 o 3 cos ф 3
-s 3 ( 1 4 cos ф 3 + 1 3 sin ф 3 )
Следовательно, можно легко получить значения аналогов скоростей V 3 и ω 3 . После проведенных промежуточных преобразований, приходим к следующим выражениям для нахождения аналогов скоростей V 3 и ω 3 .
Рассмотрим группу Ассура третьего вида.
Положения звеньев данной группы можно определить, воспользовавшись данными рисунка 3 [3, 5]. Длину активной части кулисы l 3 определим из выражения
1 3 =V ( A x - C x ) 2 + ( A y - C y ) 2 - 1 22 , (15)
|
b 1 |
a 12 |
a 11 |
b 1 |
|||
|
V —- |
b 2 |
a 22 |
a 21 |
b 2 |
||
|
V 3 |
a 11 |
a 12 |
; o 3 = |
a 11 |
a 12 |
. (20) |
|
a 21 |
a 22 |
a 21 |
a 22 |
Продифференцировав дважды (17) по φ 1 и решив полученную систему уравнений, имеем:
где координаты точек А и С и длина второго звена l 2 известны. Угол наклона кулисы φ з определим из выражения
ф 3 = arctan
( A y
-c 3
Cy
-
I Ax - C x
arctan
V 1 3 J
. (16)
b — Aa x — AC x + 2 V 3 ^ 3 a 21 + a 22 ^ 3 ;
2 (22)
b — Aa — Ac., + 2 Voxa + a.? ^ . yy
Продифференцировав систему уравнений (23) по φ 1 , получим после простых преобразований:
Группа Ассура четвертого вида
Положения звеньев данной группы Ассура определим по рисунку 4, на котором приведены обозначения звеньев и кинематических пар [3, 5]. Запишем систему уравнений замкнутого контура в проекциях на координатные оси X, Y
A x + 1 1 cos ф 2 — 1 2 sin ф 2 — C x + 1 4 cos ф 3
— 1 3 sin ф3,
; (23)
A y + 1 1 sin ф 2 + 1 2 cos ф 2 — C y + 1 4 sin ф 3
b — Vcx — Va x + ® 2 ( 1 1 a 21 + 1 2 $ h ) + +® з ( 1 4 a 22 + 1 3 a^ )
b 2 — Vc y — Va y + rn 2 ( 1 1 au + 1 2 a 21 ) +
+® з ( 1 4 a ^ + 1 3 a 22 )
— 1 3 cos ф 3 .
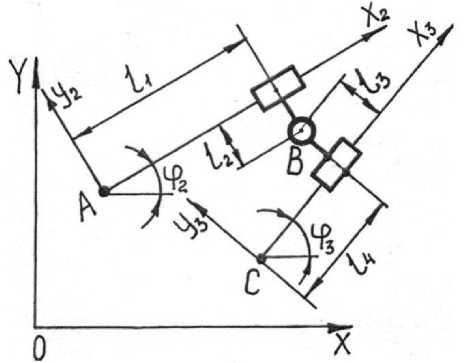
Рисунок 4. Расчетная схема группы Ассура четвертого вида
Дважды продифференцировав (23) по φ 1 , можно получить
A 1 —
b1
b2
a11
a21
; a 4 —
a11
a21
a11
a21
, (28)
где a 11 , a 12 , a 21 , a 22 определяются из (25), a b 1 и b 2 – по выражениям, которые после всех промежуточных преобразований имеют следующий вид:
Ь 1 — Ac x — Aax + 2 V 1 ^ 2 a 21 + + ^ 2 ( 1 1 $ц — 1 1 a 21 ) + 8 2 ( 1 1 a 21 + 1 2 $ц )
b 1 — b 1 + 2 V 4 ^ 3 a 22 +
Figure 4. Settlement schemes of two flood groups of Assur fourth look
Неизвестными в данных выражениях являются l 1 и l 4 , а остальные данные передаются в процедуру и являются известными. Полученная система уравнений является линейной относительно неизвестных. Запишем решение этой системы в виде:
+ ^ 3 ( 1 4 a 12 1 3 a 22 ) + 8 3 ( 1 4 a 22 + 1 3 a 12 )
b 2 — Ac y — Aa y + 2 V 1 ^ 2 a 11 +
+ ^ 2 ( 1 1 a 21 1 1 a n ) + 8 2 ( 1 1 a 11 + 1 2 a 21 )
b 2 — b 2 + 2V 4 ® 3 a 12 +
+ ^ 3 ( 1 4 a 22 — 1 3 a 12 ) + 8 3 ( 1 4 a 12 + 1 3 a 22 )
b 1
b 2
a 12
a 22
a 11 a 12
a 21 a 22
a 11 b 1
a 21 b 2
|
4 |
a 11 |
a 12 |
|
a 21 |
a 22 |
где коэффициенты a 11 , a 12 , a 21 , a 22 , b 1 , b 2 определяются по выражениям:
an — cos ф 2 ; a 12 — — cos ф 3 ;
b l — Cx — Ax + 1 2 a 21 + 1 3 a 22 ;
a 21 — sin ф 2 ; a 22 — — sin ф 3 ;
Ь 2 — C y — A y — 1 2 йц + 1 з $ 12 *
Группа Ассура пятого вида
Положения звеньев определим с помощью рисунка 5, где приведена схема группы, обозначения звеньев и кинематических пар и система координат [3–10]. Напишем проекции замкнутого векторного контура на координатные оси X, Y
A x — C x + Bx 3 cos ^ 3 + Ax 2 cos ( ^ 3 + а ) —
-
— 1 2 sin ( ф 3 + а )
; (30)
A y — C y + By 3 sin ф 3 + Ay 2 sin ( ф 3 + а ) —
-
— 1 2 cos ( ф 3 + а )
Выражения (30) легко приводятся к линейной системе двух уравнений, решение которых мы проведем по правилу Крамера
b 1 a 12
Bx 3 =
b2
a11
a21
;
|
a 11 |
b 1 |
||
|
Ax 2 =- |
a 21 |
b 2 |
, (31) |
|
a 11 |
a 12 |
||
|
a 21 |
a 22 |
b1 = Va x - Vc x
+№ 3 ( Bx 3 a 21 + A X 2 a 22 + 1 2 a 12 ) ;
b 2 = Va y - Vc y
+№ 3 ( B x з a n + A x 2 a ^ + l 2 a 22 ) .
где коэффициенты a 11 , a 12 , a 21 , a 22 , b 1 и b 2 определяются по следующим зависимостям:
Дважды продифференцировав выражения (30) по φ 1 получаем выражения для определения аналогов ускорений Ab x 3 и Aa x 2
a11 = cos ф 3 ; a 12 = cos( ^ 3 + a ) ;
a 21 = sin ф 3 ; a 22 = sin( ^ 3 + a ) ;
b1 = Ax - Cx + 1 2 a 22 ;
b 2 = A y - C y + l 2 a i2 .
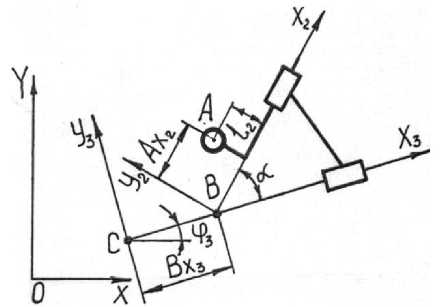
Рисунок 5. Расчетная схема группы Ассура пятого вида
Figure 5. Settlement schemes of two flood groups of Assur fifth look
b1 = Aa x - Acx
+ 2 № 3 ( Vb x 3 a 21 + Va x 2 a 22 )
+№ 3 ( B x 3 a n + A x 2 a i2 - l 2 a 22 )
£ 3 ( Bx 3 a 21 + A x 2 a 22 + 1 2 a 12 ) ; b 2 = Aa y - Ac y
- 2 № 3 ( Vbx 3 a ll + V a x 2 a 12 ) +№ 3 ( Bx 3 a 21 + A x 2 a 22 - 1 2 a i2 ) - ^ 3 ( Bx 3 a ll + A x 2 a 12 - 1 2 a 22 )
Продиффиринцировав выражения (30) по φ 1 , получим выражения для определения аналогов скоростей Vb x 3 и Va x 2
b 1 a 12
a 11 b 1
Vb
b 2 a 22
a 11 a 12
V a
a 21
a 11
b 2 a 12
, (33)
a 21
a 21
a 22
где a 11 , a 12 , a 21 , a 22 определяются из (30), a b 1 и b 2 – по выражениям:
Список литературы Математическая модель кинематического расчета плоских рычажных механизмов
- Ковалёв М.Д. О структурных группах Ассура//Теория механизмов и машин. 2006. Т. 4. № 1. С. 18-26.
- Александров В.В., Александрова О.В., Буднинский М.А., Сидоренко Г.Ю. Об экстремалях кинематического управления движением//Вестн. Моск. ун-та. Сер. 1. Математика. Механика. 2013. № 3. С. 38-46.
- Кирсанов М.Н. Уравнения кинематики плоского механизма в координатной форме//Теория механизмов и машин. 2011. Т. 9. № 2. С. 85-89.
- Верховод В.П. Изучение кинематической геометрии плоских механизмов в системе GeoGebra//Теория механизмов и машин. 2012. Т. 10. № 2. С. 54-65.
- Сидоренко А.С., Дубец С.В., Дубец А.В., памяти Ю.А. Компьютерное моделирование и анализ кинематики механизмов второго класса//Молодежные чтения памяти Ю.А. Гагарина: мат. Межвузовск. науч.-практ. конф.. 2014. С. 154-157.
- Li S., Dai J. S. Structure synthesis of single-driven metamorphic mechanisms based on the augmented assur groups//Journal of Mechanisms and Robotics. 2012. Т. 4. №. 3. С. 031004.
- Quintero H. и др. A novel graphical and analytical method for thekinematic analysis of fourth class Assur groups//Revista Facultad de Ingenier?a Universidad de Antioquia. 2011. №. 60. С. 81-91.
- Rojas N., Thomas F. Distance-based position analysis of the three seven-link Assur kinematic chains//Mechanism and Machine Theory. 2011. Т. 46. №. 2. С. 112-126.
- Sun Y. и др. Solving the Kinematics of the Planar Mechanism Using Data Structures of Assur Groups//Journal of Mechanisms and Robotics. 2016. Т. 8. №. 6. С. 061002.
- Rojas N., Thomas F. Formulating Assur kinematic chains as projective extensions of Baranov trusses//Mechanism and Machine Theory. 2012. Т. 56. С. 16-27.
- Пекарев В.И., Матвеев А.А. Математическая модель винтового маслозаполненного компрессора с впрыскиванием жидкого рабочего вещества//Вестник Международной академии холода. 2013. № 3. С. 11-13.
