Математическая модель машинно-тракторного агрегата на базе трактора с гидростатической трансмиссией

Автор: Кравченко Владимир Алексеевич, Стулинь Виталий Александрович
Журнал: Вестник аграрной науки Дона @don-agrarian-science
Рубрика: Технологии, средства механизации и энергетическое оборудование
Статья в выпуске: 4 (36), 2016 года.
Бесплатный доступ
Целью работы является создание математической модели машинно-тракторных агрегатов на базе энергетических средств с гидростатической трансмиссией. Скоростные энергетически насыщенные трактора сельскохозяйственного назначения при работе в реальных условиях эксплуатации имеют показатели намного ниже потенциальных, так как в связи с повышенным значением поступательных и инерционных масс машинно-тракторных сельскохозяйственных агрегатов снижаются эффективная мощность двигателя, тягово-сцепные свойства движителей, повышается расход горюче-смазочных материалов и т.д. Поэтому современные сельскохозяйственные агрегаты работают с меньшими, по сравнению с запланированными, производительностью и экономичностью. Для снижения негативного влияния неустановившихся режимов движения на выходные показатели сельскохозяйственных агрегатов необходимо разрабатывать технические средства, технологические и другие мероприятия. При определении показателей работы машинно-тракторных сельскохозяйственных агрегатов применяют в настоящее время данные типовых тяговых характеристик тракторов, полученные в результате их испытаний при постоянном тяговом сопротивлении. В действительности же машинно-тракторный агрегат подвергается внешним воздействиям, носящим динамический характер. Стохастический характер внешних воздействий существенно отражается на показателях работы агрегатов. Существуют различные способы уменьшения влияния колебаний тяговой нагрузки на выходные показатели машинно-тракторного агрегата. Одним из них является применение гидростатической передачи. Проверка эффективности работы машинно-тракторного агрегата с гидростатической трансмиссией энергетического средства экспериментальным путём сложна, дорогостояща и требует большого количества времени. Поэтому проводят виртуальные исследования с целью оценки влияния гидростатической трансмиссии на энергетические и другие показатели машинно-тракторных агрегатов при неустановившихся режимах нагрузки, которые характерны в реальных условиях эксплуатации. В работе предложена математическая модель МТА на базе мобильного энергетического средства с гидростатической трансмиссией, с помощью которой можно осуществить аналитический расчет основных показателей машинно-тракторного агрегата. Доказано, что внедрение математической модели упрощает и облегчает расчёты эксплуатационных показателей машинно-тракторных агрегатов.
Математическая модель, машинно-тракторный агрегат, мобильное энергетическое средство, двигатель, гидростатическая трансмиссия, гидравлический насос, гидравлический мотор, движитель, буксование, крюковая нагрузка
Короткий адрес: https://sciup.org/140204397
IDR: 140204397 | УДК: 631.372
Текст научной статьи Математическая модель машинно-тракторного агрегата на базе трактора с гидростатической трансмиссией
Введение и цель работы. При определении показателей работы машиннотракторных сельскохозяйственных агрегатов (МТА) в настоящее время применяют данные типовых тяговых характеристик тракторов, полученные в результате их испытаний при постоянном тяговом сопротивлении. В действительности же МТА подвергается внешним воздействиям, носящим динамический характер [1, 3, 5-9].
Стохастический характер внешних воздействий существенно отражается на показателях работы агрегатов [1, 5, 8, 9].
Возникающие при эксплуатации МТА случайные колебания тяговой нагрузки, амплитуда которых достигает 30-40% от её среднего значения, являются следствием воздействия на движители трактора неровностей поля, неравномерности взаимодействия рабочих органов сельскохозяйственных машин с почвой и т.д. Такой характер динамического воздействия вызывает изменение работы двигателя, колебания остова, повышенное буксование движителей, что приводит к снижению показателей работы МТА.
Существуют различные способы уменьшения влияния колебаний тяговой нагрузки на выходные показатели МТА [3, 4, 5, 7]. Одним из них является применение гидростатической передачи, основной недостаток которой специалисты видят в пониженном КПД её по сравнению с механической. Однако использование механического привода в реальных условиях эксплуатации не позволяет использовать максимально возможную энергию двигателя внутреннего сгорания (ДВС). Этот «генетически» присущий шестеренной передаче фактор (своего рода «шаг квантования») закрывает проблему КПД гидростатической передачи.
В Азово-Черноморском инженерном институте ФГБОУ ВО Донской ГАУ разработана схема гидростатической трансмиссии сельскохозяйственного мобильного энергетического средства (рисунок 1).
Проверка эффективности работы МТА на базе мобильного энергетического средства (МЭС) с гидростатической трансмиссией экспериментальным путём сложна, дорогостояща и требует большого количества времени. Поэтому целесообразно провести аналитические исследования с целью оценки влияния гидростатической трансмиссии на энергетические и другие показатели МТА при неустановившихся режимах нагрузки, которые характерны в реальных условиях эксплуатации [1,2, 10].
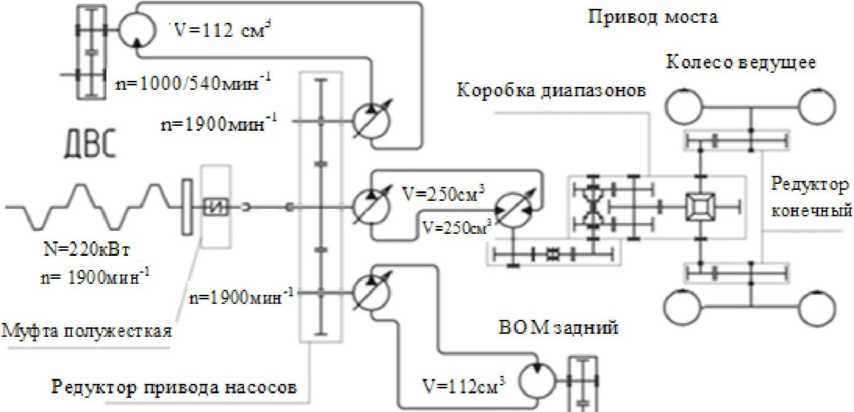
п= 1000/5 40mhhj
Рисунок 1 - Схема приводов силового вращательного движения мобильного энергетического средства
Поэтому целью работы является создание математической модели машиннотракторных агрегатов на базе энергетических средств с гидростатической трансмиссией.
Исходные данные для разработки модели. При математическом моделировании МТ А рассматривают как динамическую систему, состоящую из элементов и звеньев. Движение составляющих динамической системы происходит под действием различных возмущающих и управляющих факторов, которые могут быть описаны математическими функциями [1-5, 10].
Трансмиссия мобильного энергетического средства - динамическая система, состоящая из вращающихся масс с различными упругими и демпфирующими связями.
Для аналитических исследований движения МТА составляют динамическую модель, в которой поступательные и вра щающиеся массы агрегата заменяют маховиками, моменты инерции которых выбираются из условия равенства их кинетической энергии и заменяемых масс агрегата [1, 2, 3, 5, 6].
Сельскохозяйственный МТА на базе мобильного энергетического средства с гидростатической передачей в трансмиссии нами рассматривается как динамическая модель (рисунок 2), в которой массы с моментами инерции Ji заменяют движущиеся детали двигателя, JMC - вал муфты сцепления, J2 - детали привода насоса гидростатической передачи, J; и J4 - колёса МЭС и тс - поступательно движущиеся массы агрегата.
МТА представлен последовательно соединёнными звеньями: двигатель - силовая передача - ведущее колесо - нагрузка, с отображением упругих и демпфирующих связей между ними.
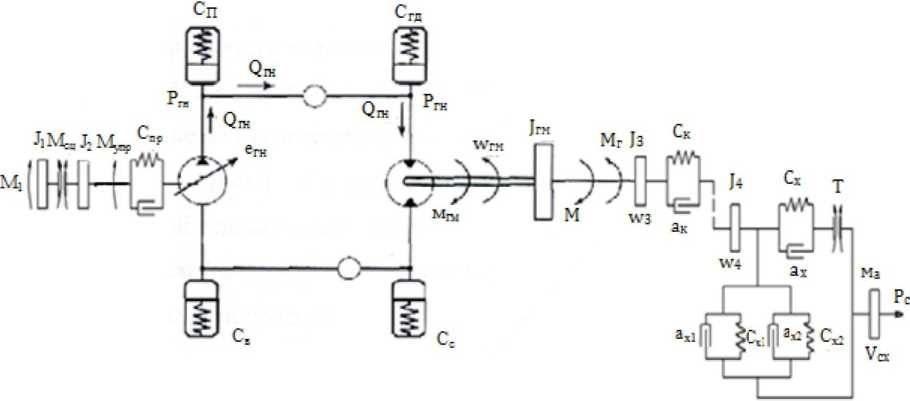
Рисунок 2 - Схема динамической модели МТА на базе трактора с гидростатической трансмиссией
При составлении модели были сделаны следующие основные допущения:
-
- рама МЭС с агрегатами, закреплёнными на ней, представлена как твердое тело;
-
- колебания звеньев системы определяются от начала координат в центре масс МЭС;
-
- МЭС сохраняет прямолинейное движение;
-
- упругие связи между звеньями представлены с линейной характеристикой;
-
- воздействия на правые и левые колеса приняты одинаковыми;
-
- силы вязкого трения в звеньях динамической системы приняты пропорциональными относительным скоростям, а силы неупругого сопротивления - усилиям.
Материалы и методы исследования. Поведение динамической модели МТА на базе мобильного энергетического средства с гидростатической трансмиссией определяется углами поворота элементов системы фі (фі - коленчатого вала двигателя, фмс - вала муфты сцепления, фз - вала привода насоса гидростатической передачи, фгм - вала гидромотора, фз - оси ведущего колеса, ф4 - беговой дорожки шины) и положением в агрегатах.
Так как силовые установки современных мобильных энергетических средств имеют всережимные регуляторы и турбонагнетатели, нами к вышеобозначенным параметрам динамической системы добавлены координаты положения рейки топливного насоса z и угла поворота ротора турбонагнетателя фн [2, 3].
Производные от обобщенных координат по времени представляют собой обобщенные скорости соответствующих элементов и звеньев динамической системы агрегата.
Движение МТА происходит под действием крутящего момента, развиваемого двигателем Mi, момента трения между ведущими и ведомыми дисками муфты сцепления Мсц, моментов упругих сил связи, возникающих в трансмиссии мобильного энергетического средства Мупр и Му, момента от окружной деформации шины Мшк, момента, обусловленного упругостью и демпфированием в шине Мш, усилием в контакте отпечатка шины с опорным основанием тфй,) и усилием сопротивления рабочих органов при работе машины рс [2, 3].
В представленной динамической модели учитывается сухое и вязкое трение в элементах системы, жесткости трансмиссии и шины, буксование движителей коэффициентами атр, ак, az, ах, стр, ск, cz, сх и б. Математическая модель двигателя нами представлена в следующем виде [2, 3, 5]:
J,-d>, = avcx^av(D^civz -Мт
Jh"®h =в1-Ю1 + в2-Юн+вэ- Z , т -z + ^-z + c1-z=c2-o1.
где со 1, со„ — угловые скорости соответственно коленчатого вала и ротора турбонагнетателя двигателя;
тр - масса всережимного регулятора двигателя;
J„ - момент инерции турбонагнетателя двигателя;
аі, аз, аз, ві, вз, вз - экспериментальные коэффициенты;
Р - коэффициент вязкого трения;
ci, сз - коэффициенты, определяемые экспериментально.
В начальный период разгона агрегата, когда имеется разность угловых скоростей ведущего coi и ведомого соз дисков, моментом сопротивления Мс движению МТА является момент трения муфты сцепления Мсц. Значение момента трения между дисками муфты сцепления с достаточной степенью точности описывается зависимостью [2, 3, 5]:
где п - количество пар поверхностей трения между дисками муфты сцепления;
Рпр - максимальное усилие, создаваемое пружинами муфты сцепления;
А? - средний радиус дисков муфты сцепления;
t - время включения муфты сцепления; ki, кз - показатели, полученные экспериментальным путем;
Лмах, ^И - максимальное значение и относительное изменение коэффициента трения между дисками сцепления.
Движение механической передачи привода гидравлического насоса мобильного энергетического средства с гидростатической трансмиссией определяется, в том числе, коэффициентами жесткости Стр и вязкого трения атр.
Движение масс привода гидравлического насоса мобильного энергетического средства с гидростатической трансмиссией на основе разработанной динамической модели опишется уравнением:
J2-^=^4^ + <^2X
где dmp-a)2 - параметр, определяющий потери энергии на вязкое трение при равномерном вращении деталей привода гидромотора.
Значение момента Мупр зависит от угла закручивания вала привода гидромотора. Применительно к рассматриваемой динамической модели имеем:
М = С -ф + а • (ар — о ) упр тр ттр тр \ 2 гн; .
Уравнение (5) в окончательном варианте можно представить в следующем виде:
J2 • - (Стр • фтр + атр • (щ2 - щгн) + атр
Объемная гидростатическая передача с регулируемым гидравлическим насосом (0 < егн < 1) и нерегулируемым гидравличе ским мотором (егн = 1) с достаточной степенью точности описывается дифференциальными уравнениями (8-12):
(jp-J Ya> =ГС + tz -со ) + tzz -соЛ-е -V-----р \ 2 гм/ гн тр т тр тр \ 2 гн; тр 2-1 гн н<
Г)2 -О2
Р гн Р гм 'Рм’
Q = е -V -со •;
гн гн гн р„ = 4 + т;*—
О»)
ОО
где Ji - приведенный к валу насоса момент инерции подвижных частей гидронасоса;
Jzm - приведенный к валу гидравлического мотора момент инерции его подвижных частей;
Огм - угловая скорость вращения вала гидравлического мотора;
ргн - давление рабочей жидкости на выходе гидравлического насоса;
Ргм ~ давление рабочей жидкости на входе гидравлического мотора;
егн - параметр регулирования гидравлического насоса;
Угн - рабочий объем гидравлического насоса;
F„ - площадь поперечного сечения трубопровода;
Q2h, Qzm - расходы рабочей жидкости на выходе гидравлического
насоса и на входе в гидравлический мотор;
Пмгн, Пмгм ~ механические коэффициенты полезного действия гидравлического насоса и гидравлического мотора;
Логн, Логм - объемные коэффициенты полезного действия гидравлического насоса и гидравлического мотора, учитывающие внутренние утечки жидкости в гидравлических машинах;
кс - коэффициент, учитывающий потери на трение при турбулентном потоке;
рм - плотность рабочей жидкости гидростатической передачи.
При движении колесного движителя в ведущем режиме под действием веса мобильного энергетического средства, силы сопротивления перекатыванию и крутящего момента, прилагаемого к оси колеса, оболочка шины испытывает различные деформации. Шину можно представить двухмассовой динамической моделью, в которой маховик с моментом инерции J3 заменяет обод колеса и часть шины, а маховик с моментом инерции J4 - беговую дорожку шины.
Динамику ведущего колеса мобильного энергетического средства можно описать следующей системой дифференциальных уравнений [3, 4, 5]:
-i —М
3 3 упр тр шк
-tb^ =мшк -мш.
Момент упругой связи Му в механической передаче от вала гидравлического мотора к оси ведущего колеса может быть рассчитан по зависимости
Му = Стр • к<Ргм ~ imp • Фз )+ «тр ' few " ^р ' Фз УМ ' ^Э^гм " Ітр ' Фз )
где
ітр - передаточное число механической передачи силового потока от вала гидравлического мото
вала гидравлического мотора к оси ведущего колеса;
М - момент сухого трения в силовой
ра к оси ведущего колеса; передаче от вала гидравличе- стр - жесткость силовой передачи ва- ского мотора к оси ведущего ла от гидравлического мотора к колеса.
оси ведущего колеса; Момент сухого трения передачи фгм, фз - соответственно углы энергии от вала гидравлического мотора к поворота вала гидравлического оси ведущего колеса мобильного энергети-мотора и оси ведущего колеса; ческого средства определяется по формуле атр - коэффициент демпфирования передачи силового потока от
М = Стр • ^Ф™ "Ітр • Фз)' ^"ЛтрХ где
Лтр ~ КПД силовой передачи. шины, рассчитать можно по следующей
Момент, возникающий от закрутки зависимости [3, 4, 5]:
Мшк = Ск2 • {(Рз - ^4)+ «К2 • («3 - ^4) , где сК2, аК2 - коэффициенты, характеризующие жёсткость и демпфирование колеса в окружном направлении.
Момент Мш, связанный с упругостью и демпфированием в шине, можно определить по зависимости [3, 4, 5]:
Мш = (cx-x + ax-x)-rd+R-a2, где сх ,ах - коэффициенты, характеризующие продольную жесткость и вязкое трение в шине;
а - смещение результирующей реакции R опорного основания относительно центра вращения колеса;
га - динамический радиус качения ведущего колеса.
Так как центр ведущего колеса при движении из-за продольной деформации шины смещается в противоположную движению сторону, нами тангенциальная жесткость пневматической шины, включаемой обычно при моделировании в жёсткость всей силовой передачи, заменена продольной жесткостью сх [3]. Смещение оси ведущего колеса тем больше, чем выше толкающая сила Т колеса, которую можно определить по зависимости [3, 4, 5]:
Т = Сх "х + ах " х.
При увеличении плеча вертикальная нагрузка на ведущее колесо и реакция опорного основания создают дополнительный момент сопротивления перекатыванию [3, 4].
аш = / • Гс +
Смещение оси ведущего колеса а^ в зависимости от деформации шины х можно с достаточно высокой степенью точности определить по формуле сх • х + ах • х
Cz (15)
где / - коэффициент сопротивления каче- Результирующую вертикальную ре нию движителя в свободном ре- акцию опорного основания на ведущие ко-жиме; леса можно определить по зависимости гс - радиус качения движителя в свободном режиме.
Rx=c-z+a-z+c-zr,
2 z ш z ш z О ( 10 )
где cz - радиальная жёсткость шин движителей мобильного энергетического средства;
az - коэффициент вязкого трения в радиальном направлении шин движителей мобильного энергетического средства;
гш - деформация шины движителя, обусловленная колебаниями остова мобильного энергетического средства;
zo - статическая деформация шины движителя.
Динамический радиус ведущего колеса определяется как расстояние от оси движителя до опорного основания:
В связи с имеющимися неровностями опорного основания и колебаниями тягового сопротивления при работе сельскохозяйственного агрегата возникают колебания мобильного энергетического средства как в продольной, так и в вертикальной плоскости. Тогда движение МТ А можно описать системой дифференциальных уравнений [3]:
тс1 zc = czi • k " 7i)+«zi • k "7і) + cz2 • k - 72) + «z21 k "72);
J=' Фе = ki' k " 7i) + «zi• k - 7JL «- k2 • k - 72)+«z2 • k - 72)Г b +
+k2 • -c + ^2 -^L k + һсУрс • h=;
mc'Vo;=Cx-X ^«xX -Pc~mc' S-ф^
где Jc - приведённый к центру масс момент инерции мобильного энергетического средства;
zc - вертикальное отклонение центра масс мобильного энергетического средства от равновесного состояния;
Ф= - продольный угол поворота остова относительно центра масс мобильного энергетического средства;
zi, Z2 - вертикальные отклонения от равновесного состояния центров масс ведущих мостов мобильного энергетического средства;
Чь 42 - координаты микронеровностей опорного основания под передними и задними колёсами мобильного энергетического средства;
а, b - координаты переднего и заднего мостов от положения центра масс мобильного энергетического средства;
hc - координата вектора силы тяги от положения центра масс мобильного энергетического средства;
czi, Cz2 - приведённые жёсткости упругих элементов передней и задней подвесок мобильного энергетического средства;
«zi, «z2 - коэффициенты демпфирования в передней и задней подвесках мобильного энергетического средства и шин движителей;
Vcx - скорость МТ А.
Скорость МТА определяем с использованием положений теории М.В. Келдыша:
Рех
®4 • г0 • 1 - 8Х • R2 - £,---signet^
^0

где Го - свободный радиус пневматического колеса;
£1, £2 - коэффициенты, учитывающие деформацию волокон шины от действия вертикальных и продольных сил;
д - коэффициент буксования движителя мобильного энергетического средства.
0, если Т < ф0К
Буксование движителей мобильного энергетического средства в зависимости от толкающей силы Т(Х), реализуемой в контакте ведущего колеса с опорным основанием, можно представить в виде системы дифференциальных уравнений:
ln[k-A-T)/k-^0)-A] К6
0,9, если Т > ф R
если ф0К АТ < фК
где фо, ф - коэффициенты, характеризующие взаимодействие движителей мобильного энергетиче ского средства с опорным основанием.
Силу тягового сопротивления МТА Рс можно представить в виде [2, 3]:
Л- = Го + Л/ЩҚ, -Го)]-(1 -/■'')+ Fit\ где Рсо - среднее значение тягового сопротивления при скорости движения МТ A Vo,
NPC - скорость изменения тягового сопротивления при увеличении скорости движения агрегата с Vo до Vcx;
F(t) - случайная функция, характеризующая изменение тягового сопротивления агрегата по времени;
кт - коэффициент, определяемый экспериментально.
При решении системы уравнений, описывающей движение МТА на базе мобильного энергетического средства с гидростатической трансмиссией, приведённой к каноническому виду, нами был принят метод Рунге-Кутта.
Результаты анализа экспериментальных и полученных при решении математической модели диаграмм разгона МТА показали, что относительная погрешность расчётов не превышает 6,5%, значения критериев Стьюдента и Фишера не превышают табличных значений, а коэффициент корреляции показывает тесную связь между сравниваемыми результатами.
Выводы. На основании вышеизложенного математическую модель МТА на базе мобильного энергетического средства с гидростатической трансмиссией можно считать вполне удовлетворительной. Следовательно, с помощью полученной математической модели можно провести теоретические исследования влияния неустано-вившегося характера тяговой нагрузки на выходные показатели работы МТА на базе мобильного энергетического средства с гидростатической трансмиссией.
Список литературы Математическая модель машинно-тракторного агрегата на базе трактора с гидростатической трансмиссией
- Иофинов, С.А. Определение эксплуатационных параметров и показателей работы агрегатов при вероятностном характере исследуемых величин/С.А. Иофинов, Б.К. Микуберг//Механизация и электрификация социалистического сельского хозяйства. -1971. -№ 12. -С. 42-46.
- Кравченко, В.А. Математическая модель машинно-тракторного агрегата с УДМ в трансмиссии трактора/В.А. Кравченко, Л.В. Кравченко, В.В. Серёгина//Политематический сетевой электронный научный журнал Кубанского государственного университета (Научный журнал КубГАУ) . -Краснодар: КубГАУ, 2014. -№ 103. -IDA: 1031409016. -Режим доступа: http://ej.kubagro.ru/2014/09/pdf/16.pdf. -С. 251-261.
- Кравченко, В.А. Повышение динамических и эксплуатационных показателей сельскохозяйственных машинно-тракторных агрегатов: монография/В.А. Кравченко. -Зерноград: ФГОУ ВПО АЧГАА, 2010. -224 с.
- Кравченко, В.А. Повышение эксплуатационных показателей движителей сельскохозяйственных колёсных тракторов: монография/В.А. Кравченко, В.А. Оберемок, В.Г. Яровой. -Зерноград: Азово-Черноморский инженерный институт ФГБОУ ВПО Донской ГАУ, 2015. -213 с.
- Кравченко, В.А. Повышение эффективности МТА на базе колёсных тракторов/В.А. Кравченко, В.А. Оберемок, Л.В. Кравченко//Технология колёсных и гусеничных машин. -2014. -№ 6 (16). -С. 45-50.
- Кутьков, Г.М. Теория трактора и автомобиля/Г.М. Кутьков. -Москва: Колос, 1996. -287 с.
- Упругодемпфирующий привод на колесных тракторах/О.И. Поливаев, Н.Е. Гусенко, А.С. Дурманов, Р.И. Фролов//Механизация и электрификация сельского хозяйства. -1990. -№ 3. -С. 11-12.
- Ma Z.D. and Perkins N.C.A. Track-wheel-terrain interaction model for dynamic simulation of tracked vehicles//Vehicle System Dynamics. -2002. -Vol. 37. -No. 6. -Р. 401-421.
- Slattengren, J. Utilization of ADAMS to predict tracked vehicle performance//Paper 2000-01-0303 presented at SAE 2000 World Congress, 6-9 March, Detroit, MI, USA.
- Wong J.Y. and Wei H. Evaluation of the effects of design features on tracked vehicle mobility using an advanced computer simulation model//International Journal of Heavy Vehicle Systems. -2005. -Vol. 12. -No. 4. -Р. 344-365.
