Математическая модель обоснования вариантов реконфигурации распределенной автоматизированной контрольно-измерительной системы

Автор: Новиков Александр Николаевич, Нечай Александр Анатольевич, Малахов Александр Владимирович
Рубрика: Математическое моделирование
Статья в выпуске: 1-2, 2016 года.
Бесплатный доступ
Представлены результаты исследований особенностей применения методов многокритериального выбора в нечёткой среде при обосновании вариантов реконфигурации распределенной автоматизированной контрольно-измерительной системы с использованием нечетких исходных данных о режимах и условиях проведения измерений (контроля). Разработанная математическая модель, в отличие от существующих, позволяет исключить ряд допущений и ограничений, характерных для случаев, когда динамические характеристики управляемого процесса и внешних воздействий на процесс известны, в лучшем случае, с точностью до параметров, которые могут непредсказуемо меняться в широких пределах и для их описания необходимо использовать векторные показатели с большим числом компонент. Показано, что применение аппарата теории нечетких множеств существенно дополняет методологию решения задач синтеза оптимальных и адаптивных систем. Модель в значительной степени универсальна для применения как в самоорганизующихся распределенных автоматизированных контрольно-измерительных системах - системах с автоматической реконфигурацией структуры, так и в самоалгоритмизирующихся - с автоматическим изменением алгоритма работы.
Многокритериальный выбор в нечёткой среде, автоматическая реконфигурация, показатели оценивания альтернатив, нечёткая мера, метод сравнения нечётких интервалов, нечёткий интеграл, контрольно-измерительные системы
Короткий адрес: https://sciup.org/148160251
IDR: 148160251 | УДК: 621.317
Mathematical model for justification of options reconfigurations of the distributed automated control and measuring system
In this article are presented the results of researches of features of application of methods of a multicriteria choice in the indistinct environment at justification of options of reconfiguration of the distributed system automated control and measuring with use of indistinct basic data about the modes and conditions of carrying out measurements (control). The developed mathematical model, unlike the existing allows to exclude a number of assumptions and restrictions, characteristic for cases when dynamic characteristics of the operated process and external impacts on process are known at best to within parameters which can is unpredictable to change in wide limits and for their description it is necessary to use vector indicators with a large number a component. It is shown that use the of device of theory of indistinct sets significantly supplements methodology of the solution of problems of synthesis of optimum and adaptive systems. The model is substantially universal for application as in the self-organizing distributed automated control and measuring systems - systems with automatic reconfiguration of structure, and in the systems which are independently changing the algorithm of functioning.
Текст научной статьи Математическая модель обоснования вариантов реконфигурации распределенной автоматизированной контрольно-измерительной системы
В настоящее время в промышленности и научных исследованиях наблюдается существенный рост требований к контрольноизмерительным системам с точки зрения их при-спосабливаемости для достижения оптимальной адаптации к конкретной измерительной задаче с целью обеспечения наилучших показателей быстродействия, точности и помехоустойчивости, пропускной способности и функциональ- ной избыточности. Потребность в контрольноизмерительных системах, обладающих такими свойствами, существует в различных сферах деятельности, в числе которых - компонентные тестирования и мониторинговые исследования быстропротекающих процессов при испытаниях ракетно-космической техники, а также динамический мониторинг конструктивной целостности в процессе ее эксплуатации. На сегодняшний день таким потенциалом обладают только автоматизированные контрольно-измерительные системы с пространственно распределенной модульной компоновкой (далее - РАКИС). Они позволяют использовать только то количество измерительных модулей, которое требуется для решения измерительных задач, что позволяет оптимизировать затраты, а распределенное решение обеспечивает оптимальное отношение результативности и ресурсоемкости, в особенности для крупногабаритных измерительных установок. Так, например, измерительные модули могут располагаться локально вблизи точек измерений и соединяться через последовательный интерфейс. За счет этого снижаются требования к проводке, достигается легкость в обслуживании и, что очень важно, короткие кабели датчиков делают результаты измерений менее чувствительными к помехам и, таким образом, более стабильными и точными.
Однако, как показал опыт применения такого рода РАКИС, зачастую имеющихся аппаратных возможностей с фиксированными алгоритмами измерительных циклов оказывается недостаточно для более эффективного решения возложенной на РАКИС контрольно-измерительной задачи. Выяснилось, что без обеспечения возможности динамического изменения режимов работы РАКИС (изменение последовательности измерений, настроек синхронизации, типа входа и вида измеряемой величины и т.д.), причем в автоматическом режиме, значимого повышения эффективности работы РАКИС не добиться. Соответственно возникла необходимость в разработке научно-методического обеспечения создания распределенных автоматизированных контрольно-измерительных систем с автоматической реконфигурацией. Следует отметить, что задачи максимально полного использования вычислительного ресурса и обеспечения эксплуатационной надежности (резервирования) такого рода оптимальных и адаптивных систем в большинстве своем решены в рамках теории автоматического управления (регулирования) [1-5]. Однако вопросы моделирования процедуры многокритериального выбора конфигурации
РАКИС посредством априорного сравнительного оценивания различных вариантов и сегодня остаются одной из центральных проблем повышения их эффективности. Существует ряд сложных моментов, затрудняющих решение этой проблемы. В частности, ряд переменных, отражающих влияние внешних факторов (условий) проведения измерений (электромагнитные помехи, вибрации, солнечная радиация, состав газов и параметры их динамических состояний и т.д.) при оценивании показателя результативности на этапе анализа вариантов формирования оптимальной конфигурации РАКИС, может быть оценён лишь приблизительно, с указанием примерного интервала возможных значений и ожидаемого распределения на этом интервале. Сам процесс обоснования решения на реконфигурацию осуществляется в условиях ограниченного объёма информации об ожидаемых характеристиках результата реконфигурации, а опыт лица, принимающего решение (специалиста в области технологии измерений и контроля), может выражаться в виде вербальных описаний. Кроме того, нужно учесть, что современные образцы РАКИС являются достаточно сложными и для их описания необходимо использовать векторные показатели с большим числом компонент.
Многомерность сравниваемых альтернатив и существенная степень неопределённости оценивания показателей приводят к необходимости отнесения задачи сравнения вариантов реконфигурации РАКИС к классу задач многокритериального выбора в нечёткой среде.
В указанных выше условиях актуальной научной задачей является разработка математической модели обоснования вариантов реконфигурации РАКИС с максимально возможным использованием ее аппаратного ресурса на основе нечётких моделей.
Постановка задачи исследования
Общая постановка задачи в этом случае выглядит нижеследующим образом.
Пусть:
Z = { zx }, ( 1 = 1, L ) - множество вариантов реконфигурации РАКИС;
X = { X} }, ( i = 1, n ) - множество частных показателей оценивания вариантов реконфигурации РАКИС;
A = {а ,} - множество значений частных ^~ ^~ li показателей Х;
G = { g i } - множество значений коэффициентов важности частных показателей Х ;
~ й = {( f l ( x ), H a l, [( f l ( X )]} - результат нечёткого оценивания , -го частного показателя 1 -го варианта;
ВЕСТНИК 2016
f l ( x ) = x i ^ [0,1];
Ца , [(f (Х)] - функция принадлежности ^~ l нечёткого множества ~ ц ;
gi = {(gi,E (gi)} — результат нечёткого оце-~х нивания коэффициента важности г-го частного показателя из множества Х;
E g, ( g i ) - функция принадлежности нечёткого мн о жества g i .
Решение ~
Решающее правило для выбора лучшего ва- рианта виде:
где E l
реконфигурации РАКИС выражается в z * = arg max El, le1, l ~
- значение обобщённого показателя для l-го варианта реконфигурации РАКИС, Et = est (A , G).
,~ ,■ •
ВЕСТНИК 2016
Вычисление обобщённого показателя E l , как следует из выражения (2), связано с проведением определённых преобразований над нечёткими векторами А ~ и G . Естественно, что и результат такого преобразования будет представлен в нечёткой форме. Предлагается для вычисления по формуле (2) применить нечёткий интеграл [6]. При этом
E i = est i ( A , G ) = maxmin{ a u, g x ( X a )} .
— a г. eA —
,— ,—
Здесь gx (Xa ) — нечёткое значение обобщённого коэ~ффициента важности показателей из множества Х, входящих в множество Ха, дл(Ха) = {(дл(Xa), Egx(дл(Ха))}, (4) ~ ~ где дX(Ха) - обобщённый коэффициент важности группы частных показателей, входящих в множество а-уровня, д^ (ха) = д^{x I fl(х) > а}. (5)
Вычисление по формуле (3) требует предварительного задания способа вычисления по формуле (5) и правил сравнения нечётких множеств.
Вычисление по формуле (5) требует введения понятия нечёткой меры. Для данного случая наиболее удобной мерой является так называемая X-мера (мера Сугено) [7]. Для X-меры справедливо следующее выражение: ГК. Л 1 Г К дл I Ux | = у П(1 + Л?2(х))-1 v i=1 ) л l i=1
Иными словами, если известны коэффициенты важности отдельных показателей x,, i = 1, К, то важность группы показателей из К элементов может быть вычислена по формуле (6). Кроме того, для упрощения вычислений исходные нечёткие множества ~ li и д, представляются в трапецеидальной форме. П~ри этом любое такое нечёткое множество может быть описано кортежем из четырёх чисел. Например, нечёткое множество M записывается в виде M = (m, m, а, в), где [m, m] - ядро нечёткого интервала; [m-a, m+вА - носитель нечёткого интервала; т. - нижнее модальное значение; m- верхнее модальное значение; а - левый коэффициент нечёткости; в - правый коэффициент нечёткости. Тогда исходные данные для сравнения вариантов реконфигурации РАКИС можно записать в виде:
~ и = ( а ^, a ii , аи , Р), (7)
g i = (£, g„ a в ). (8)
При задании исходных данных в форме выражений (7) и (8) значение X -меры также будет нечётким:
~ = ( X , X, а„ в , ).
При этом, используя условие
2 л
K
П (1 + Л д х ( x )) - 1
i = 1
= 1,
можно производить вычисление X j (j' =
1,2,...,4)
по следующим д ^
g 1 = g, -a, ; g 2 = g i ; g з = g , ;
g 4 = gi + в , (рис. 1).
По результатам вычислений строится нечёткая X -мера (9) следующим образом:
Л = Л 3 ; Л = Л , ; ал = Л 3 - Л 4;
Р л = Л 1 - Л
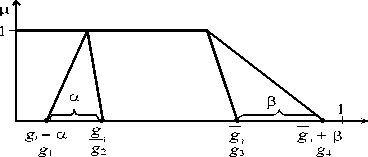
Рис. 1. Построение нечёткой X -меры
При условии задания X -меры в виде выражения (9) вычисление д x ( X a ) по формуле (4) не представляет труда. ~
Для сравнения нечётких чисел целесообразно использовать метод сравнения нечётких интервалов [6], который предполагает вычисление и последующее сравнение двух векторов A <4> и B < 4 > . В случае если A < 4 > > B < 4 > , делается вывод о том, что нечёткое множество A > B . Векторы формируются следующим образом:
A <4> = { a 1 , a 2 , a 3 , a 4 },
B<4> = {b 1, b2, b3, b4}, где a1 = POS(a > b) = max (0,min (1,1 + (a - b)/(pa + ab)));
Список литературы Математическая модель обоснования вариантов реконфигурации распределенной автоматизированной контрольно-измерительной системы
- Теория систем с переменной структурой/под ред. Емельянова C.B. -М.: Наука, 1970. -592 с.
- Бусленко В.Н. Автоматизация имитационного моделирования сложных систем. -М.: Наука, 1977. -240 с.
- Справочник по теории автоматического управления/под ред. А.А. Красовского. -М.: Наука. Гл. ред. физ.-мат. лит., 1987. -712 с.
- Филипс Ч., Харбор Р. Системы управления с обратной связью. -М.: Лаборатория базовых знаний, 2001. -601 с.
- Бесекерский В.А., Попов Е.П. Теория автоматического управления. -СПб.: Профессия, 2004. -752 с.
- Нечёткие множества в моделях управления и искусственного интеллекта/под ред. Д.А. Поспелова. -М.: Радио и связь, 1986.
- Дюбуа Д., Прад А. Теория возможностей. Приложение к представлению знаний в информатике. -М.: Радио и связь, 1990.
- Котиков П.Е., Нечай А.А. Решение проблемы управления параллельным выполнением транзакций в распределенных базах данных для устранения опасной противоречивости/П.Е. Котиков, А.А. Нечай//Вестник Российского нового университета. Серия «Сложные системы: модели, анализ и управление». -2015. -Выпуск 2. -С. 62-64.
- Котиков П.Е., Нечай А.А. Репликация данных между серверами баз данных в среде геоинформационных систем/П.Е. Котиков, А.А. Нечай//Вестник Российского нового университета. Серия «Сложные системы: модели, анализ и управление». -2015. -Выпуск 1. -С. 88-91.
