Математическая модель поверхности, контролируемой экспериментальным лазерным кругломером

Автор: Заякин Олег Александрович
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Перспективные информационные технологии
Статья в выпуске: 2-5 т.17, 2015 года.
Бесплатный доступ
Приведена математическая модель поверхности, контролируемой экспериментальным лазерным кругломером. Прибор предназначен для контроля формы зеркально отражающей рабочей поверхности детали подшипника. Контроль проводится путем координатных измерений. Характерная особенность способа измерений - основа на обработке сигнала от зеркальной составляющей отраженного зондирующего лазерного пучка. Модель пригодна для оценки алгоритмической составляющей погрешности метода.
Триангуляция, измерения геометрических величин, математическая модель, поверхность, кругломер, зеркально отраженный свет, топограмма, статистические характеристики
Короткий адрес: https://sciup.org/148203732
IDR: 148203732 | УДК: 531.717.81:514.88:51-74
Mathematical model of surface monitoring by an experimental laser roundness meter
A mathematical model of surface monitoring by an experimental laser roundness measuring instrument is being discussed. The device is designed for quality conformance inspection of some mirror bearing surfaces. The procedure is conducted by means of a coordinate metrology technique based on signal processing of a mirrored probing laser beam. As a result, this model has been proved to be suitable for algoritmic component assessing of the method error.
Текст научной статьи Математическая модель поверхности, контролируемой экспериментальным лазерным кругломером
Рис. 1. Оптико-механическая схема координатных измерений:
1 – источник излучения; 2 – контролируемая поверхность;
3 – видеокамера; AB, С направления сканирования;
—— a , b – падающий и отраженный лучи света; ψ , ξ – координаты точки падения отраженного луча на фотоприемнике; d – смещение источника излучения; L – радиус поворота каретки с видеокамерой
Для получения расчетной функции преобразования модель поверхности должна отвечать требованиям геометрической оптики.
Модель поверхности представлена в данной работе как жесткий сплошной экран с коэффициентом отражения, равным единице. Для анализа функции преобразования требуется еще, чтобы поверхность в модели была гладкой. Это означает, что отражение от каждого ее точечного участка описывается так же, как и отражение луча от плоскости, ориентированной перпендикулярно локальной нормали к моделируемой поверхности в ее освещенной точке. Минимальные воспроизводимые в модели детали рельефа по- верхности ограничиваются размером светового пятна, которое перемещается по контролируемой поверхности при ее сканировании.
Уравнение восстановленной поверхности F ( Г ) = 0 (см. рис. 2):
——
F ( r ) = F o ( Г ) + F( A r ) , (1)
Г Г где r0 и r - радиус-векторы точки номинальной
— и восстановленной поверхностей; Ar = r - r0; Fo(r0) = 0 - уравнение номинальной поверхности.
—
Функция A r(r0) , которая выводится из F 1 ( A r ) = 0 , определяет отклонения формы реальной поверхности от номинальной формы.
Для анализа удобно представить 2-е слагаемое в (1) в виде явной скалярной функции h ( r0) . Эта функция ставит в соответствие каждой точке номинальной поверхности значение высоты отклонения формы, отсчитанной от этой точки.
—
Пусть A r ( r0) не перпендикулярен номи-нальной поверхности. Рассмотрим точки на поверхности, определяемые r0 и r 0 2 (см. рис. 1). Различие высот в этих двух точках не превосходит величины 0,05 рад . Тогда искомая функция
—
h ( Г> ) - ^Г^, (2)
s где s = Г (r0)=± grad F0 (имеется ввиду градиент в физических координатах). В системе цилиндрических координат { р, ф, z } :
grad F0 =
ff F 1 F v д р ’ р дф ф
д ,F ;
(V Z у
где р , ф , z - соответственно радиусная, азимутальная и осевая координаты. Функция Г ( Г 0) определяет перпендикуляр в каждой точке номинальной поверхности.
Функцию h ( r 0) назовем «функцией отклонения от номинальной формы». Отсчет h ведем в радиальном направлении.
Представим h ( r 0) в виде топограммы.
Для того чтобы моделировать типичную поверхность, нами использованы статистически усредненные спектральные зависимости, характеризующие амплитуды пространственных гармоник профилей этой поверхности. Эти зависимости получают, считая профили поверхности реализациями случайного процесса. Каждая из этих зависимостей относится к множеству однотипных профилей. Она представляет собой функцию спектральной плотности мощности указанного случайного процесса. Преимущества этого подхода в том, что, во-первых, таким путем нетрудно получить замкнутые профили, а во-вторых, из спектрального представления профилей поверхности нетрудно получить ее топограмму.
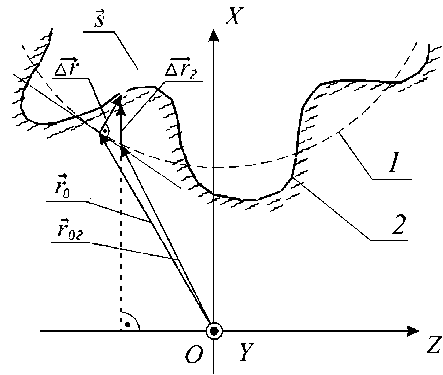
Рис. 2. Связь между разными представлениями рельефа поверхности:
1 – номинальная поверхность;
2 – модель реальной поверхности
Опишем, как может быть получен из указанной функции соответствующий ей модельный профиль поверхности. Основываясь на соотношениях между спектральными и статистическими характеристиками шероховатости поверхности, приведенными в [3], считаем, что для этого достаточно выполнить следующие два условия. Во-первых, отсчеты амплитуд гармоник профиля моделируемой поверхности следует расположить равномерно по оси абсцисс и совместить с графиком зависимости, представляющей собой квадратный корень из названной функции спектральной плотности мощности. График данной зависимости при этом служит огибающей дискретного спектра гармоник. И, во-вторых, начальные фазы гармоник не должны коррелировать между собой.
Мы моделируем бездефектную поверхность, то есть поверхность, удовлетворяющую требованиям к ее качеству формы. Числовые коэффициенты в формулах, описывающих такую бездефектную поверхность, получим из экспериментальных графиков.
Для моделирования трехмерной поверхности используем топограмму ее неровностей. По приведенным в научных публикациях [4] топограм-мам реальных рабочих поверхностей довольно сложно получить их математическое описание, так как информация приведена в графическом виде. Статистических зависимостей в аналитическом виде в рассмотренных публикациях не приводится. Для решения этой задачи в данной работе используем следующий подход.
Топограмма моделируемой поверхности должна учитывать статистические характеристики этой поверхности, описывающие ее профили в различных направлениях. Как правило, это два ортогональных направления в криволинейных координатах, определяемых номинальной поверхностью. Будем считать, что эти про- фили представляют собой реализации случайных процессов, не зависящих друг от друга в том, что касается их вероятностных характеристик. Далее, для моделирования нужной нам топограммы используем понятия «двумерной пространственной частоты», широко применяемое в физической оптике и основанной на нем характеристики -функции двумерной спектральной плотности мощности случайного процесса. Взаимная статистическая независимость двух одномерных случайных процессов позволяет нам представить эту функцию в виде произведения двух функций одномерной спектральной плотности:
f ( ^ 1 , ^ 2 ) = f 1 ( ^ 1 ) f , Ц ) , (4) где ( У 1 , to 2 , - пространственные частоты вдоль профилей, совпадающих с координатными линиями криволинейного базиса, соответственно, l = R ф и X (поперекноминальной поверхности – это осевое сечение).
Отсюда, с помощью преобразования Фурье функции, являющейся квадратным корнем функции (4), получим отсчет высоты микрорельефа в любой нужной точке с координатами l и X. Замкнутость профилей вдоль направляющих линий номинальной поверхности ведет к дискретности спектра частот Ю 1 . Эти частоты должны удовлетворять условию ю 1 = N/R , где N – количество волн (отклонений от круглости), приходящееся на оборот поверхности. При этом функция двумерной спектральной плотности получается дискретной вдоль оси частот (У 1 и непрерывной вдоль оси частот <У 2 . На графике она представляет собой набор плоских фигур, параллельных друг другу и оси <у 2 , и перпендикулярных оси ( У 1 . Форма этих фигур такова, что функция f ( ^ 1 , < У 2 ) является для них огибающей.
Примем, что R не зависит от X , а R равно его среднему интегральному значению по X . Таким образом, формула для расчета топограммы моделируемой поверхности имеет вид:
+ю +^
h (Ф, X )=C E J g(N, ^2) f(N )• f2 (^2)х N=1 ®2 = ®2min х cos[Nф - п1 (N)+ ю2X — П2(^2)]d®2, (5) где п1 (N), П2 (®2) — функции, каждая из которых имеет значение случайной величины с равномерным законом распределения в интервале от 0 до 2п рад. Это значение фиксировано при заданном значении аргумента. При этом выполняется условие (например, для п1 (N)):
П 1 ( A ) = % ( B ) , если A = B ;
П 1 ( A ) * Ц 1 ( B ) , если A ^ B , (6) где A и B – отвлеченные числа. Фактически, (5) представляет собой дискретное преобразование Фурье. Пример использования этого преобразования приведен в (4).
Минимальная частота ^2min выбирается по возможности близкой к нулю, чтобы моделировать поверхность, не замкнутую в направлении X. Функция g(N, ю2) имеет следующие значения:
0 , если N = 0 и ^ 2 = 0 ;
1/2 , если N = 0 и ^ 2 ^ 0 , или N ^ 0 и ( У 2 = 0 ;
-
1 , если N ^ 0 и ^ 2 ^ 0 .
Нормирующий множитель C определим из уравнения:
2 h = C EJ f (N) f, (®2) d®2, (7) \ NeD®2eE где D – множество гармоник, соответствующее полосе пропускания частотного фильтра при снятии круглограммы; E - интервал, равный всему диапазону частот ^2 модельной поверхности.
Остановимся на особенностях алгоритма, связанных с дискретностью численных расчетов. Так как моделирование поверхности с использованием формулы (2.5) проводится численно, то гармоники ^2 также, как и (У1 образуют дискретный набор:
ю 2 =
п M
C iXa ,
где M = 1,2,3,... . Значение C 1 выбирается в пределах от четырех до пяти. При меньших значениях C 1 получается, что высоты микрорельефа в точках с координатами X =± X o при одинаковых Ф заметно коррелируют. Это допускать не следует, если надо более близко к реальности смоделировать незамкнутый профиль. С другой стороны, если C 1 будет больше этого значения, то тогда амплитуду низших гармоник уже нельзя будет считать единственным показателем их вклада в моделируемый микрорельеф. Имеются ввиду те гармоники, для которых четверть их периода больше, чем длина профиля по оси X в пределах от минус X 0 до X 0 . Тогда разность высот микрорельефа, в том случае, если он будет представлен только одной из этих гармоник, не достигнет значения амплитуды гармоники на всем протяжении профиля от минус X 0 до X 0 . И тогда вклад этих гармоник придется учитывать со своим весом, меньшим единицы, что несколько усложняет расчеты. Вместе с тем, при значениях множителя C 1 из указанного диапазона получится, что во многих случаях спектры частот Ю 1 и <У 2 будут отличаться по густоте заполнения гармониками. Это надо будет учесть при нормировании функций, описывающих огибающие спектра f ( ^ 1 ) и f2 ( го 2 ) . В данном примере для этого использована относительно несложная оценка, о которой будет сказано ниже. Итак, указанный диапазон значений C 1 можно считать оптимальным.
Соответствующая максимальной частоте
®1max величина Nmax = \K4], где К — КОЛИчество просканированных точек вдоль одного профиля радиального сечения, приходящееся на полный оборот вокруг поверхности. Операция \ ] означает выделение целой части числа. Такая величина Nmax выбирается потому, что при этом чувствительность высших гармоник ряда Фурье к погрешности величин в каждом из K отсчетов разлагаемого в этот ряд профиля находится в приемлемых пределах. В данном случае имеются ввиду такие пределы, при которых высшие гармоники ряда Фурье имеют физический смысл. Это ограничение на Nmax в несколько раз сокращает объем вычислений, необходимых для моделирования в данной задаче. Аналогично, используя (8), получаем
M
max
C 1 Х о
2 а х
где А х — шаг дискретизации профиля поверхности вдоль оси Х .
Значения К и А х выбираются в модели так, чтобы шаг дискретизации профилей вдоль обоих направлений ф и Х не был больше, чем пространственное разрешение «в плане» тех деталей микрорельефа контролируемой поверхности, которые должны восстанавливаться с помощью исследуемого способа. Поясним, что речь здесь идет о размерах микронеровностей в направлениях, параллельных касательной плоскости к номинальной поверхности на ее локальном участке.
Рассмотрим для примера дорожку качения шарикоподшипника типа 201. Получим математическую модель низкочастотных составляющих микрорельефа поверхности в виде топограммы. Пусть имеем К = 600 . Шаги дискретизации в направлениях ф и Х выберем так, чтобы на криволинейно поверхности они были по во зможности одинаковыми. Итак, пусть А х = А 1 ( х ) = 2 п • R ( x )/ К . Тогда, учитывая геометрические параметры номинальной поверхности: R ( х ) = 8,65 мм , Х о = 2,36 мм , имеем
N max = 150 , M max = 65 . Черта над символом означает интегральное усреднение. Координата, по которой проводится усреднение, записана в скобках.
Получим функцию двумерной спектральной плотности мощности, нужную для нахождения амплитуд пространственных гармоник. Для этого воспользуемся табл. 1. В ней приведены статистические характеристики различных случайных функций. В каждой отдельно взятой строке таблицы приведены данные, относящиеся к какой-либо одной из этих функций.
В табл. 1 приведены некоторые аналитические функции из тех, которые могут быть использованы для описания низкочастотных составляющих профилей микрорельефа рабочих поверхностей изделий машиностроения.
Сопоставим эти функции с экспериментальными спектральными зависимостями, приведенными в литературных источниках. Воспользуемся, например, графиком из [4], с. 216, где показано спектральное представление профиля шлифованной поверхности кольца подшипника качения. Из этих данных получаем следующие оценки для амплитуд Н (N) гармоник профиля модельной поверхности с числом волн N на оборот этой поверхности: Н (2)=1 мкм , Н (4)=0,35 мкм , Н (16)=0,15 мкм . Амплитуда гармоники отсчитывается от среднего интегрального значения радиального профиля.
Из этого сопоставления можно видеть, что ни одной из формул, приведенных в таб. 1, не удается с приемлемой точностью описать экспериментальный спектр во всем диапазоне его частот. Для повышения точности аппроксимации поступим следующим образом. Разделим весь диапазон частот этой спектральной зависимости на две части, в пределах каждой из них аппроксимируем ее отдельно, с учетом условия «сшивки» этих двух аппроксимирующих функций между собой на границе между двумя частями частотного диапазона. Границу раздела нетрудно определить по характерным различиям в поведении экспериментального графика на разных участках спек-
Таблица 1. Статистические характеристики различных случайных функций
|
Автоковариационная функция, аргумент т , т > 0 |
Функция спектральной плотности мощности, аргумент to , to > 0 |
|
exp ( - т/ a ) |
1 1 + а2 to2 |
|
exp ( - т 2 la 2 ) |
( to2 а 2) exP 4 1 V 4 ) |
|
1 - т/а , если т < a , 0 , если т > а |
• 2 ( 1 sin 1 — а to 1 V 2 ) to2 |
тра. Эта граница находится в пределах величин N от четырех до шести. Для упрощения расчетов примем, что это значение равно четырем, тогда оно будет согласовано с границей спектрального диапазона гранности.
Для описания спектра на участке верхних частот выберем функцию из 1-й строки таб. 1, так как из всех трех функций она наиболее близка к экспериментальному графику при N > 4 . Чтобы описать спектр на другом участке, в области нижних частот, используем функцию из 3-й строки табл. 1. В пределы этого участка попадает только несколько старших гармоник. Поэтому, учитывая также «статистический разброс» экспериментальных данных, допустимо выбрать любую функцию из таблицы. При выборе мы учитываем типичный вид автоковариационной функции для низкочастотных составляющих профилей микрорельефа рассматриваемых объектов.
Используя метод наименьших квадратов, получаем для функции f (N) следующее вы- ражение:
f (N )=C1 н f.( N )=C в
■ 2 I 1 N sin I — aAH =7=
12 1 Н Ka
[ 2 a 1 H RN )]
1 + a 1 В

, если N = 1,2,3 ,
,если N = 4,5,6, ...,150 , (11)
где C,, = 1,67740 - 10 6 мм 2 , 1 Н
C1В = 1,7408-10-7 мм2, a1 Н =10,496 мм , a1 В =1,403 мм
Функцию f2 ( M ) опишем таким же выражением, как и функцию f ( N ) :
I a™ M I sin 2 I —2 Н I
-
2 C / J
f 2 ( M ) = C 2 Н x , v .2 , если M = 1, (12)
I a 2 н M |
12 C0 X0 J f2 (M )=C2 Вx-------1-----■, если M=2,3,4,
, 2 I n M I
1 + a 2 в I I
I C 0 X J
... ,
65. (13)
В условиях недостатка опытных данных и отсутствия известных нам теоретических пред- посылок примем, что a2Н = a1 Н и a2В = a1 В .
В силу того что разность частот между соседними гармониками различается в направлениях осей Ф и X, будут отличаться и нормирующие множители C1Н и С2Н , а также C1В и C2В . Значения неизвестных коэффициентов С2Н и C2В найдем путем сопоставления выражений (10) - (13) друг с другом. При этом считаем, что статистическая оценка высот профилей поверхности в обоих рассматриваемых направлениях имеет одинаковые численные значения. В качестве такой статистической оценки используем квадратичную сумму амплитуд гармоник профиля поверхности. Суммирование производим по гармоникам, которые попадают в одинаковые частотные диапазоны, занимаемые профилями модельной поверхности в направлениях Ф и X. Подчеркнем, что речь в данном случае идет о модельных, а не полученных экспериментально профилях поверхности. Для повышения точности оценки неизвестных значений коэффициентов используем как можно более широкий спектральный диапазон модельных профилей. Получаем C2Н = 5,9492-10 '■ мм2, C2В = 3,9964-10"7 мм2.
Следующий шаг – получение выражения для огибающей функции двумерной спектральной плотности мощности случайного процесса, моделирующего топограмму интересующих нас микронеровностей. Это выражение имеет следующий вид, как следует из (4):
f ( N , M ) = Cg ( N , M ) f 1 ( N ) f 2 ( M ) , (14) где функция g ( N , M ) аналогична функции g ( N , to 2 ) в формуле (5).
Нормирующий множитель C , имеющий размерность [ мм -2 ], определим из уравнения (7). В левой части этого уравнения должно стоять известное значение (или оценка) амплитуды профиля реальной поверхности, с учетом ширины частотного диапазона модельной поверхности. Амплитуда профиля определяется как сумма отклонений в обе стороны от средней линии этого профиля.
Поскольку цель состоит в моделировании бездефектной поверхности, то график экспериментального профиля, уже использованный нами здесь, для этого не подходит, так как в [4], где он приведен, не содержится заключение о качестве поверхности, с которой был снят этот профиль. Вместо этого используем результаты координатных измерений колец шарикоподшипников с бездефектной поверхностью. Для подстановки числового значения h в (7) выберем высоту гран-ности, а не волнистости, так как использованный выше график спектра профиля поверхности из [4] полностью включает в себя диапазон частот дефектов этого вида, в то же время частотный диапазон волнистости представлен там лишь частично.
Для оценки гранности в рассматриваемой задаче мы использовали результаты измерений контактным кругломером Talyrond-50, полученные на Самарском подшипниковом заводе СПЗ-4. Измеренная высота гранности, по этим результатам, составила 0,13 мкм .
В соответствии с [5], а также исходя из представления одномерного профиля спектром двумерных частот, получаем из (7) следующее соотношение:
( V2 x 0,25 H гр )
= С Ё f 1 ( N ) Ё f 2 ( M ) g ( N , M ) , (15)
M = 0
где H гр = 0,13 мкм . Отсюда получаем C = 415,3 р 66 мм 2 при ранее найденных зна-чениях коэффициентов, входящих в функции f ( n ) и f ^ ( м ) .
С использованием полученных результатов была составлена компьютерная программа на MathCad 4.0. С ее помощью была получена модельная топограмма рассматриваемого объекта. Топограмма представлена в виде двумерного массива отсчетов высот микрорельефа поверхности. Массив имел размерность 600 отчетов, вдоль развертки кольца, на 40 отсчетов, в поперечном направлении.
Пример моделирования поверхности приведен на рис. 3 в). Для сравнения на рис. 3 а) и б) приведены микротопограммы реальных поверхностей, номинальная форма которых является плоской. Они были получены с помощью микроинтерферометра, согласно [4]. Сравнение их с результатами нашего моделирования показало, что модель достаточно верно представляет типичную обработанную металлическую поверхность детали машиностроения после ее финишной (чистовой) обработки – шлифования и полирования. Отметим, что на рис. 3 представлены бездефектные поверхности, то есть такие, которые удовлетворяют требованиям к допустимым отклонениям своей формы.
Вместе с тем видно, что для верного представления сильно направленных следов обработки, характерного, кстати, для рабочих поверхностей деталей подшипников, модель нужно дополнить масштабированием в одном из выделенных ортогональных направлений на топограмме.
Также можно видеть на глаз некоторую «искуссвенность» модельного микрорельефа, которая заключается в ярко выраженном прямоугольном рисунке представленного фрагмента поверхности. Это можно объяснить тем, что при моделировании мы выбрали примерно одинаковый шаг дискретизации функции спектральной плотности мощности по обеим направлениям пространственных частот to 1 и ю 2 . Но если шаг для to 1 определялся условием замкнутости радиального профиля, то для ю 2 такого условия нет. Такой выбор экономит ресурсы компьютера (память и время работы программы). Но по оси ^ 2 отсчеты следует делать чаще, по крайней мере, на порядок.
Таким образом, описанная математическая модель можно признать пригодной для расчета характеристик алгоритмической составляющей погрешности метода для ее дальнейшего исполь-
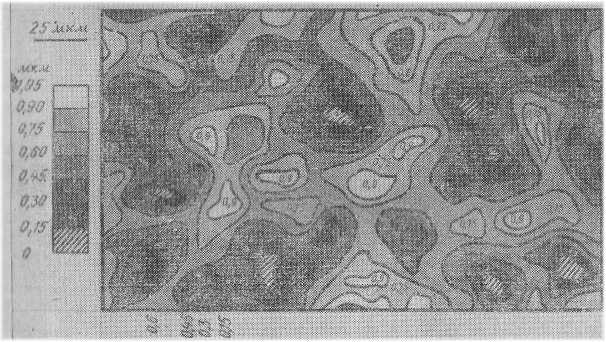
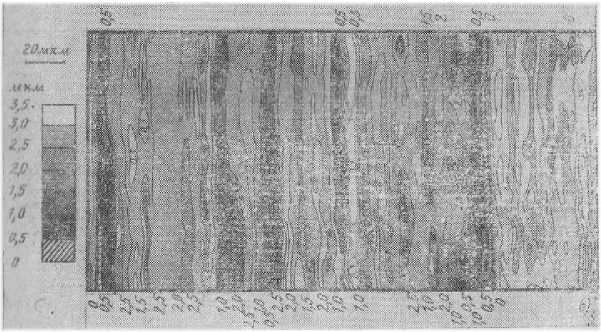
Рис. 3. Микротопографические карты поверхности:
а – деталь из титанового сплава после вибрационного галтования в стальных шариках; б – стальная деталь после плоского шлифования периферией круга; а) и б) – согласно [4];
в – результат моделирования
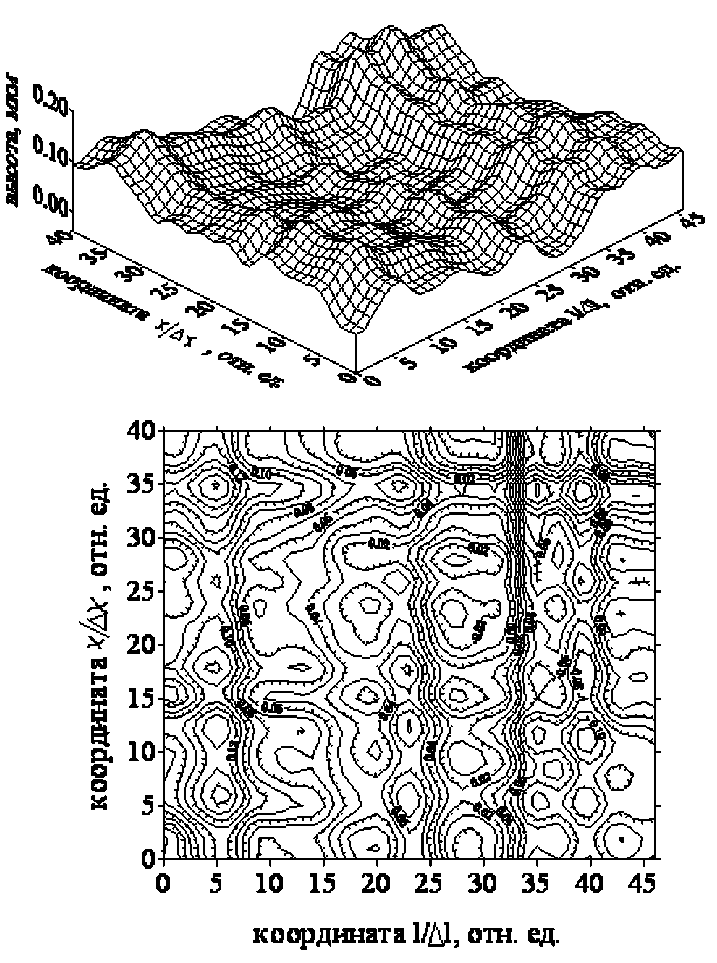
координата 1/Д1, отн. ед.
20 25 30 35 40 45
зования при проверке функции преобразования и оптимизации оптической схемы экспериментального лазерного кругломера.
Список литературы Математическая модель поверхности, контролируемой экспериментальным лазерным кругломером
- Лабораторный макет лазерного кругломера/В.Н. Белопухов, М.Ю. Грачев, М.В. Лесников, О.А. Заякин, Ю.О. Понявин//ПИТ-2012: сб. науч. тр. Самара: Изд. СНЦ РАН, 2012. С. 10-13.
- Топорец, А. С. Оптика шероховатой поверхности. Л.: Машиностроение. Ленингр. отделение, 1988. 191 с.
- Беннет, Дж. М., Маттсон М. Шероховатость поверхности и рассеяние. Вашингтон: Оптическое общество Америки, 1993. 119 с.
- Дунин-Барковский, И.В., Карташова А.Н. Измерения и анализ шероховатости, волнистости и некруглости поверхности. М.: Машиностроение, 1978. 232 с.
- Методика измерения отклонений от круглости и шероховатости поверхности деталей подшипников качения. Руководящий документ РД 37.006.106.90 Согласован. М.: НПО ВНИПП, 1990 -40 листов.
