Математическая модель привода главного движения пилорамы

Автор: Козырев Дмитрий Олегович, Авакян Арине Арамаисовна
Журнал: Advanced Engineering Research (Rostov-on-Don) @vestnik-donstu
Рубрика: Технические науки
Статья в выпуске: 2-1 (63) т.12, 2012 года.
Бесплатный доступ
Проведен анализ динамических характеристик процесса механической обработки. Построена математическая модель привода главного движения пилорамы.
Математическая модель, привод, ременная передача, кривошипно-шатунный механизм
Короткий адрес: https://sciup.org/14249792
IDR: 14249792 | УДК: 62.932
Mathematical model of headrig principal movement drive
The dynamic characteristics of the mechanical operation are analyzed. The mathematical model of the drive of the power-saw bench principal movement is built.
Текст научной статьи Математическая модель привода главного движения пилорамы
Введение. Важнейшим звеном в лесопильном производстве являются лесопильные рамы. Их существенным недостатком являются неуравновешенные силы инерции подвижных масс кривошипно-шатунного механизма, вызывающие вибрацию. Для анализа явлений, происходящих в механизме пилорамы и оценке технологического процесса, представляется возможным использование теории регулярных колебательных систем [1], основываясь на теории цепочек, позволяющей аналитически исследовать динамические характеристики систем с большим числом степеней свободы, базируясь на анализе одного структурного элемента [2-6].
Исследование процесса силового взаимодействия при распилке лесоматериала на пилорамах неизбежно сводится к построению математической модели механизмов, формообразующее движение которых и приводит к его образованию. Одна из парциальных систем пилорамы совершает неравномерное программное движение, имеется в виду кривошипно-шатунный механизм привода рамы. Кроме того, на этот привод накладываются нежелательные колебания, вызванные кинематическим возбуждением. Согласно многочисленным работам по этой теме, особенно значительные динамические ошибки возникают из-за виброускорений [1, 6]. Одной из основных задач в снижении виброактивности, а соответственно и уровня акустической эмиссии исследуемого процесса, является обеспечение требуемого закона движения (гармонического) инструмента. Таким образом, особое значение представляет исследование формообразующих движений. При исследовании динамики упругих элементов машин и механизмов, как правило, предполагается, что влияние вынуждающих колебания устройств одностороннее, т.е. отсутствует обратное влияние упругой подсистемы на источник энергии.
Целью настоящей работы является создание математической модели привода главного движения пилорамы, которая и позволит решить все указанные выше задачи.
Построение математической модели привода главного движения пилорамы. Рассмотрим механизм привода пилорамы, представляющий собой последовательно соединённую ремённую передачу, и кривошипно-шатунный механизм, который реализует кинематическую функцию положения ведомого звена.
Рассматриваемый механизм относится к классу устройств, преобразующих вращательное движение приводного вала в неравномерное движение рабочего органа. В таком случае зависимость, связывающая положение ведомого звена с углом поворота приводного электродвигателя, является нелинейной. Анализ кинематической схемы исследуемого механизма позволяет сделать вывод, что динамическая модель пилорамы может быть классифицирована как неголономная система из-за наличия ремённой передачи. Однако при этом нужно учитывать возможность проявления параметрических резонансов, так как приведённый момент инерции механизма также является функцией φ .
В этом случае динамическая модель исследуемого объекта представлена в виде расчетной схемы (рис.1).
Md
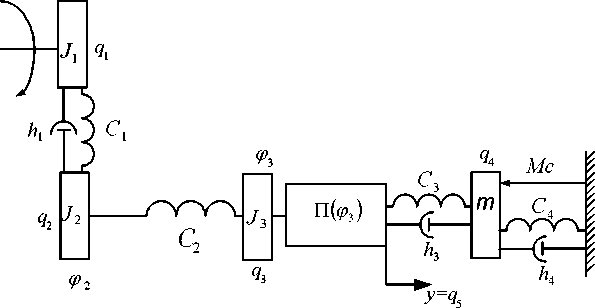
Рис.1. Расчётная схема привода пилорамы
Так как звенья этого механизма совершают сложное плоское движение в вертикальной плоскости, необходимо учитывать работу сил тяжести. Кроме того, в механизме имеется звено, совершающее плоскопараллельное движение. Для таких звеньев, согласно [4], инерционные характеристики могут быть приведены к звеньям, совершающим вращательное и поступательное движения, т.е. к кривошипу и раме. Используя метод замещения масс, получим:
L
Δ J 3 = mш ⋅ ⋅ R 2 ;
3 ш 2 3
L
Δ m = mш ⋅ 2
.
Электромеханическая система не может быть описана адекватной моделью без учёта инерционности процессов, протекающих в двигателе [3]. Уравнения, описывающие движения асинхронного электродвигателя, имеют вид:
dΨ1x dt dΨ1y dt dΨ2x
= U 1 x
-
r L' W r L W r1 ⋅ L2 ⋅ Ψ1x + r1 ⋅ L0 ⋅ Ψ
2 x
+ 0 Ψ 1 y ;
ΔΔ r ⋅ L ′ ⋅ Ψ r ⋅ L ⋅ Ψ
1 2 1 y + 1 0 2 y -Ω ⋅Ψ ;
Δ Δ 0 1x r2⋅L1⋅Ψ2x +r2⋅L0⋅Ψ1x +(Ω0 -Ω)⋅Ψ2y; t dΨ r′⋅L ⋅Ψ r′⋅L ⋅Ψ
2 y =- 2 1 2 y + 2 0 1 y - ( Ω -ω ) ⋅ψ ;
dt Δ Δ 0 2 x
= U 1 y
-
-
-
-
1 p ⋅ t ;
-
U 1 y = 2⋅ Um ⋅sinω p ⋅ t ;
dω= 3⋅Zp ⋅ L0 ⋅ Ψ ⋅i -Ψ ⋅i - 1 ⋅M , dt 2 J ⋅∆ ( 2x 1y 2y 1x) J C, где Z p – число пар полюсов электродвигателя; Ψ1x – проекция потокосцепления обмотки статора на ось x ; Ψ1y – проекция потокосцепления обмотки статора на ось y ; Ψ2x – проекция потокосцепления обмотки ротора на ось x ; Ψ2y – проекция потокосцепления обмотки ротора на ось y ; J – сумма момента инерции ротора электродвигателя и шкива; Ω0 – угловая частота вращения поля статора; Ω – угловая частота вращения ротора; ωp – угловая частота.
Таким образом, исследуемая электромеханическая система включает в себя электродвигатель, описываемый системой нелинейных дифференциальных уравнений первого порядка, а так- же системой уравнений, описывающих механическую часть привода. Для подобных задач обычно используют особую форму уравнений Лагранжа II рода с «лишними» координатами (их ещё на- зывают уравнениями Феррерса) [1, 2, 6]. Для рассматриваемого случая имеем:
d(dT A d T SP
n
= Qk ■ T ' a ■
= 1
( k = 1,..., s ) ;
I1
dt ( d qk ) d 4 k d 4 k
s
T a jk q k + a j = 0, ( j = V-, n ) .
k = 1
Обобщённые координаты выбираем, пользуясь рекомендациями, приведенными в работе [6]. Задаёмся абсолютной координатой, соответствующей перемещению в начале кинематической цепи ф1 = q1, и далее вводим координаты, двигаясь по кинематической цепи. Выпишем основные кинематические соотношения:
ф 1 = О. t = q i ;
ф 2 = ф 1 i 1 + q 2 = q i i 1 + q 2 ;
ф з = ф 1 • i 1 + q 2 + q з = q 1 i 1 + q 2 + q 3 ;
Y = п ( ф з ) = n( q 1 i + q 2 + q 3 ) ;
Z = Y + q 4; Z = q 5 + q 4, где О - угловая частота вращения приводного электродвигателя; ф1, ф2, ф3 - угловые координаты соответствующих сечений в абсолютном движении; Y — абсолютная координата массы m. Последнее замечание означает, что в качестве обобщённых координат, за исключением q1 , приняты относительные координаты, отвечающие за деформацию упругих элемен- тов.
Уравнение связи запишем исходя из условия, что Z является функцией положения [1, 6].
П ( q 1 i 1 + q 2 + q 3 ) — Z = П ( Ф 3 ) — Z = 0.
Продифференцируем это выражение по времени:
п' q1 i1 + П' q2 + П' q3 — Z = 0.
В качестве «лишней» координаты примем Y = q 5 . Число степеней свободы исследуемой системы H = 4 , число «лишних» координат n = 1 .

δ
R
Рис.2. Кривошипно-шатунный механизм пилорамы
В связи с тем, что рама с пилами движется в вертикальной плоскости (рис.2), её перемещение удобно представить в следующем виде: S max = L + R .
S = L • cos 8 — R • cos ф .
Общий катет прямоугольников ОАС и АВС определяет-(n A R ся равенством вида: sin8 = ^.sinI— — ф1, где ^ = — .
П ( ф ) = S = L • cos 8 + R • sin ф — V L — R ;
П ( ф ) = L • -^ 1 — ^ • cos ф + R • sin ф — V L — R .
После преобразования имеем:
dS d 8
= — L sin 8. + R cos ф;
d ф d ф d2 S d 25 Л d 5)
—2- = -L sin 5--2 - L cos 5 • I I - R sin d ф d ф к d ф J
—(sin 5) = — (ck sin ф) = -c• sin ф; d фV } d ф d 5 d 5 sin ф cos o = -C' sin ф или =-c • d ф d ф
‘ d 5
П ( ф ) = - L • sin 5 + R • cos ф = L •c---sin 5 + R • cos ф;
d ф d f d5 _)
• cos 5 = ( -C'sin ф ) ;
dф(dф J dф’ d 25 s f d 5)
—7 • cos 5- • sin 5 = -c• cos ф;
d ф2 к d ф J
(
d 25 d ф2
cos 5
c2' к
2 sin ф ) cos 5 J
)
-C'cosф ;
J
|
d 2 S . . „ d 25 T J d5 П ( ф ) = —7 = - L sin5-- 7- L cos5 — v ’ d ф 2 d ф 2 к d ф, f ;„a>2 ) ± \ т sin5 2 1 sinф ) I П (ф) = L • s• c •! s I c'cos ф L cos 5 •I cos 5 к к cos 5 J J |
J - R cos ф; " sin ф) 2 С _ I R • cos ф. 4 cos 5 J |
Проведём оценку спектра координаты Y с целью выявления частот возбуждения механизма механической частью привода. С этой целью проведем расчёт с использованием возможностей системы Mathcad (рис.3):
R := 0.3 - радиус кривошипа;
L := 2 - длина шатуна;
n := 325 ;
q ■= 2• n • — = 34 034 - угловая скорость кривошипа; 60.
Z ■= L = 0.15 - отношение длин кривошипа и шатуна;
k ■= 1.. 1000 ; t k ■= 0.0005^k ; ф k ■= q • t k ; 5^ ■= asin f z • sinfy - ф k )) ;
n k ■= L• U 1 - z • cos ( ф k ) + R• sin ( ф k ) ) - L ;
n 1 k ■= L• z ^
sin(ф k) cos(°k)
• sin ( s k ) + R• cos ( ф k ) ;
sin( s k ) n 2 k ■= L
cos(s k)
2 f Sin (Ф k )
Z к cosl5^)
J
- Z •cos ( ф k )
- L• cos ( s k ) •
f sin( ф k ) ) 2
VZ cos(5k)j
- R• cos ( ф k ) .
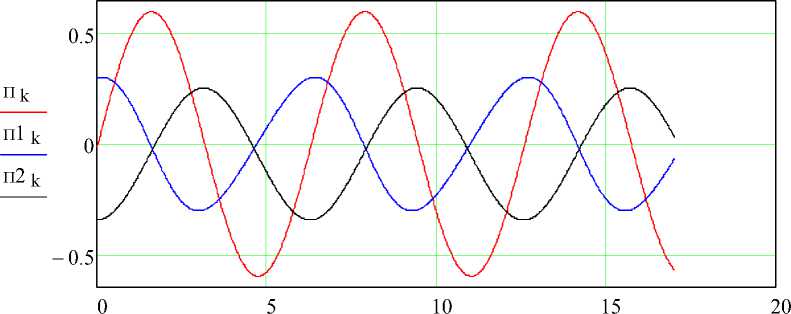
ф k
Рис.3. Соотношение выходного смещения нелинейного звена, его скорости и ускорения от угла поворота ведущего звена
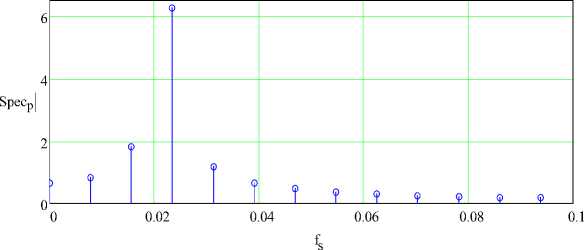
Проведём Фурье-анализ с использованием системы Mathcad (рис.4).
Как видно из анализа полученных графиков, наличие кратных гармоник просматривается, в наличии фазовые сдвиги, отличные от ^2 . Последнее означает, что можно ввести некоторые упрощения в систему уравнений динамики механизма.
p —
N0
Рис.4. Фурье-спектр выходной координаты нелинейного элемента
Для составления математической модели механической части привода пилорамы выражаем кинетическую и потенциальную энергию через принятые обобщённые координаты, включая и «лишние»:
2T = J 1 ф 2 + J 2ф 2 + J 3 ф 2 + m • Z 2;
2 P = C 1 ( Ф 2 -Ф 1 ) 2 + C 2 ( Ф з -ф2 ) 2 + C 3 • ( Z - Y ) 2.
Диссипативная функция системы (функция Релея):
2Ф = h 1 ( ф2 -ф 1 ) + h 2 ( ф3 -ф2 ) + h 4 Z: 2.
Выражение для виртуальной работы может быть записано в виде:
5 A = Md • 5 q, -F„7 •б Z -b • q 2 •б q2 - b.Z: •б Z ,
1 pez 2 2 2 4
где b 2 – приведённый коэффициент линейного демпфирования привода и ведомого звена, полученный путём эквивалентной линеаризации диссипативных сил [1, 4, 6]; b 4 – коэффициент вязкого трения при резании.
Запишем выражение кинетической энергии с учётом кинематических соотношений:
2T J 1 < д + J 2 ( < 1 i i + < 2 ) + J 3 ( < 1 i i + < 2 + < 3 ) + m * ( < 4 + < 5 ) ;
2
T
—
J
1
<7
i
+
J
2
(
<7
i
i
i
+ 2
i
i
q
i
<
2
+
<
2
)
+
J
3
(
<7
i
i
i
+ 2
i
i
q
i
* (
<
2
+
<
3
)
+
<
2
+
<
3
+
2
2
<
3
)
+
m
*
(
<
5
+ 2
<
4
<
5
+
<
4
)
;
2 T — <7 i ( J 1 + J 2 i i + J 3 i i ) + < 2 ( J 2 + J 3 ) + < 3 J 3 + 2 < i < 2 ( J 2 i i + J 3 i i ) + 2 < 2 < 3 J 3 +
+2 < i 3 ii J 3 + m< 52 + 2 т<4< 5 + m< 2 .
Исходя из матричного представления кинетической энергии системы 2 T — q T * M * q и того, что коэффициенты при обобщённых скоростях постоянны, инерционные коэффициенты приравниваем к соответствующим коэффициентам квадратичной формы, представляющей кинетическую энергию системы, получим матрицу инерционных коэффициентов в виде:
|
" J i + J 2 i i + J 3 i i |
J 2 ii + J 3 ii |
J 3 i 1 |
0 |
|
|
M — |
J 2 i i + J 3 i i |
J 2 + J 3 |
J 3 |
0 |
|
J 3 i 1 |
J 3 |
J 3 |
0 |
|
|
_ 0 |
0 |
0 |
m |
Согласно работам [1, 4] необходимо рассматривать отсчёт потенциальной энергии от положения устойчивого равновесия P ( 0,0,...,0 ) — P |0 — 0 . Кроме того, считаем, что все связи стационарны, процесс резания рассматривается не как составляющая механизма, а как внешнее воздействие. Если же принять, что передаточное отношение не зависит от скорости звеньев, матрица жёсткостей аппроксимирующей системы дифференциальных уравнений исследуемого объекта может быть принята постоянной [4].
2 P — C i ( ф2-ф 1 ) 2 + C 2 ( Ф 3 — ф2 ) 2 + C 3 ( Z — Y ) 2;
2 P — C 1 ( < 1 ( i i — 1) + < 2 ) + C 2 ( < 1 i i + < 2 + < 3 — < 1 i i < 2 ) + C 3 ( < 5 + < 4 — < 5 ) ’
2 P — < 2 * C 1 * ( i1 — 1 ) + <1 q 2 C 1 ( i1 — 1 ) + < 2 * C 1 + < 2 * C 2 + < 4 * C 3 .
Исходя из матричного представления потенциальной энергии системы 2 P — q T * C * q и того, что жёсткости связей постоянны, коэффициенты матрицы жёсткостей получим приравниванием соответствующих коэффициентов квадратичной формы, представляющей потенциальную энергию системы, в виде:
"C1*(ii —1)2 Ci .(/'1— 1) 0 0
C — C1*(ii—1) Ci 0 0
0 0 C2
_ 0 0 0 C3
В выражение потенциальной энергии вошла координата X , но хотя она посредством нелинейной функции П ( ф3 ) жёстко связанна с координатой < 3 , изменение потенциальной энергии исследуемой системы определяется перемещением инерционных масс в вертикальной плоскости [1, 4, 6].
Представим функцию демпфирования в матричном виде:
2Ф — h i ( ф 2 —ф 1 ) 2 + h 2 ( ф 3 —ф 2 ) 2 + h 3 ( Z 7 — Y 7 ) 2 ;
2 Ф — h i ( < ( i i — i ) + 2 ) 2 + h 2 ( i + 2 + 3 — < 1 i i <1 2 ) 2 + h 3 ( 5 + 4 — 5 ) 2 ;
2Ф = <7 2 • h • ( i1 -1 ) 2 + <7 2 • h + 2 • h 2 + h 3 • q 32 + 2 q 1 <7 2 • ^ ( i1 -1 ) .
Исходя из представления матрицы демпфирования в виде 2Ф = q T • H • q , получим матрицу H :
|
■ h l • ( i l - 1 ) 2 |
h l • ( i l - 1 ) |
0 |
0 |
|
|
H = |
h l • ( 4 - 1 ) |
h 1 |
0 |
0 |
|
0 |
0 |
h 2 |
0 |
|
|
_ 0 |
0 |
0 |
h 3 |
Обозначим диссипативные силы Rk , сохранив нумерацию, принятую для упругих элементов. В данном случае R 1 – момент диссипативных сил в ремённой передаче, R 2 и R 3 – момент диссипативных сил, связанных с внутренним трением в валах. Моментами сил трения в опорах пренебрегаем [1, 6]. Дальнейшие действия сводятся к записи системы дифференциальных уравнений движения и исключению множителей Лагранжа [1, 6]. Полное число уравнений равно H + n = 5 . В первой части, помимо обобщённых сил, стоит слагаемое Л a1 j , так как n = 1 . Запишем уравнения, устанавливающие связь «лишних» и независимых координат.
Определим коэффициенты уравнений дополнительных связей:
Y = q 5 = п( ф ) = п( q i i i + q 2 + q 3 ) ;
<7 5 = П ( ф3 ) • q 1 i1 + П ( ф3 ) • <7 2 + П ( ф3 ) • q 3 или П ( ф3 ) • q 1 i1 + П ( ф3 ) • q 2 + П ( ф3 ) • q3 - <7 5 = 0.
Общий вид уравнения связи:
H + n
^ a k a k + a l = 0 , k = 1
где H + n = 5 .
Сопоставим полученный результат с уравнением связи в общем виде [1,6]. Учитывая, что индекс коэффициента соответствует обобщённой скорости, запишем:
a1 q 1 + a 2 q 2 + a 3 q 3 + a 4 <7 4 + a 5 <7 5 + a l = 0 .
Из последнего равенства следует:
a 1 =П ( ф3 ) • i 1 ; a 2 =П ( ф3 ) ; a 3 =П ( ф3 ) ; a 4 = 0; a 5 =-1 .
Определение обобщённых сил проводим, составляя выражение суммы работ на виртуальных перемещениях:
5 A = Md • 5 q 1 - R 2 • 5 q 2 - R 3 • 5 q 3 - mg • 5 ( q 4 + q 5 ) - Frez • 5 ( q 4 + q 5 ) ;
Q i = Md ; Q 2 =- R 2 ; Q 3 =- R 3 ; Q 4 =- mg - Frez ; Q 5 =- mg - Frez .
Окончательно систему уравнений вынужденного движения механизма можно записать в матричном виде, выделив пятое уравнение, которое предназначено для определения множителя Лагранжа Л :
|
Md + Л a 1 |
■ Md + ЛП' i1 " |
||
|
Mq + Hq + Cq = |
- R 2 +Л a 2 - R 3 +Л a 3 |
— = |
|
|
_- mg - Frez + Л a 4 _ |
- mg - Frez |
mq 4 + mq 5 = - mg - Frez - Л.
Последнее уравнение приведённой системы используем для определения множителя Лагранжа:
Л = - mq 4 - mq 5 - mg - Frez .
Окончательно систему уравнений привода пилорамы получаем в виде матричного равенства:
( M ■ p 2 + H ■ p + C ) -q = F ( X, t ) ;
F (q, t ) =
Md + ЛП' i1 - R 2 + ЛП' - R 3 + ЛП' - mg - Frez
Md - П'i1 ■(mq4 + mq5 + mg + Frez) -R2 - П' ■ (mq4 + mq5 + mg + Frez) -R3 - П' ■ (mq4 + mq5 + mg + Frez) -mg - Frez где
m П''
i 1 ■ ( q 4 + q 5 )
•• •• q4 + q 5
•• •• q4 + q 5
= m П'" Iv ■ q 4 + m П'" Im ■ q + m П^П"
( Iv ■q ) 2
( Iv ■q ) 2
( Iv ■q ) 2
Iv =
f
;
Im =
10 J
f i i
i 1
i 1
1 10
1 10
1 10
0 00
|
Md - П' i1 ■ ( mg + Frez ) |
i 1 ■ ( q 4 + q 5 ) |
i 1 ■ ( q 4 + q5 ) |
|||
|
— |
- R 2 - П' ■ ( mg + Frez ) |
- m П'' |
• • • • q 4+ q 5 |
= F ( t ) - m П'. |
• • • • q 4+ q 5 |
|
- R 3 - П' ■ ( mg + Frez ) |
•• •• q 4+ q 5 |
0 |
• • • • q 4+ q 5 |
||
|
_ - mg - Frez _ |
. 0 . |
. 0 . |
Проведём преобразования вектора, определяемого «лишней» координатой: q 5 = П^ ( Iv ■ q ) 2 +П'. Im ■ q;
Матрица инерционных коэффициентов, очевидно, будет иметь вид:
M = M + Iv ■ m ■ П' + Im ■ m ■ П' ■ П'
Тогда система уравнений, описывающая механическую часть привода, может быть пред- ставлена матричным уравнением вида:
Me i + Hq + Cq = F ( t ) - m п'^п"
( Iv ■q ) 2
( Iv ■q ) 2
( Iv ■q ) 2
= Fsum.
Таким образом, нами получено матричное нелинейное дифференциальное уравнение второго порядка относительно выбранных обобщённых координат. Для дальнейшего исследования желательно иметь систему дифференциальных уравнений первого порядка. С этой целью проведём следующие преобразования: матрицы M, H, C рассматриваем как составляющие блочных матриц:
HM
M NulM
NulM
NulM Fsum
-M ; Q = NulV
Z
Z
где NulM - нулевая матрица 4 x 4; NulV - нулевой вектор 4 x 1 .
Система дифференциальных уравнений первого порядка может быть записана в виде:
R • X + K • X = E • Q, где E - единичная матрица 4 x 4 .
Проводим проверку сделанных преобразований:
NulMI Pq
- m ’ q
Fsum
NulV
H M . q + C M NuIm ] [q] [NulM
В результате получаем:
H • q + q • M + C • q = Fsum;
m • q - m • q = NulM.
Этот результат означает, что нами получена система уравнений, описывающая поведение станка в переменных состояния. Собственная матрица объекта получается в виде:
A = -R-1 • K, матрица управления в виде:
B = R-1 • E, где n'/n T d8 ■ „ . n T sinФ ■ T . n
П ( Ф ) = - L --sin 8 + R • cos ф = L • c---sin 8 + R • cos ф;
d ф cos 8
П" ( ф ) = L •
sin 8
cos 8
2 ( sin Ф ]
c 'Ixl
^ V cos 8)
^
-^' cos Ф
)
t x I sin Ф 1
- L cos 8 • I c--|
I cos 8 )
- R • cos Ф.
Заключение. Полученная система уравнений привода в дальнейшем может быть использована для анализа соотношения спектра колебаний, возбуждаемых приводом, как за счёт его динамических свойств, так и за счёт существенной нелинейности закона движения рабочего органа и собственных частот пилы. Кроме того, она может быть использована и при анализе вынужденных движений пилы. Таким образом, поставленная цель настоящей работы реализована, создана математическая модель привода главного движения пилорамы.
Список литературы Математическая модель привода главного движения пилорамы
- Вульфсон И.И. Колебания машин с механизмами циклового действия/И.И. Вульфсон. -Л.: Машиностроение, 1990.
- Вульфсон И.И. О колебаниях систем с параметрами, зависящими от времени/И.И. Вульфсон//Прикладная математика и механика. -1969. -Т.33, №2. -С.331-337.
- Вульфсон И.И. Кинематические задачи динамики машин/И.И. Вульфсон, М.З. Козловский. -Л.: Машиностроение, 1968. -С.281.
- Крейнин Г.В. Динамика машин и управление машинами: справ./Г.В. Крейнин. -М.: Машиностроение, 1988. -С.239.
- Вейц В.Л. Динамика машинных агрегатов/В.Л. Вейц. -Л.: Машиностроение, 1969.
- Вульфсон И.И. Динамический расчёт цикловых механизмов/И.И. Вульфсон. -Л.: Машиностроение, 1976. -С.327.
