Математическая модель процесса функционирования системы "оператор - тренажер"

Автор: Шевченко Игорь Юрьевич
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Информатика, вычислительная техника и управление
Статья в выпуске: 6-1 т.20, 2018 года.
Бесплатный доступ
Статья посвящена актуальному вопросу, связанному с оптимизацией системы управления учебно-тренировочных средств. Целью исследовательской работы является изучение поведения сложных объектов, таких как учебно-тренировочные средства и системы управления ими, для разработки математической модели процесса функционирования системы управления учебно-тренировочными средствами, ориентированными на использование в рамках имитационных моделей. Методы и материалы. Авторами разработана математическая модель, описывающая процесс выполнения операции обучаемым при функционировании учебно-тренировочного средства, применение которой позволит реализовать современные подходы при проектировании систем управления для данного типа тренажеров. По результатам выполненных исследований представлена система линейных уравнений с переменными коэффициентами, которая является основой для разработки имитационной модели программируемой в среде Matlab/Simulink, что позволит осуществить анализ поведения системы с учетом факторов, влияющих на имитируемую систему, с целью последующей оптимизации проектных решений. Установлено, что применение современных подходов, в частности оптимизации, к проектированию системы управления учебно-тренировочного средства позволяет улучшить показатели осваиваемости военной техники.
Учебно-тренировочное средство, моделирование, операция, алгоритм, функциональная схема, система управления, подсистема, оператор, тренировочный цикл
Короткий адрес: https://sciup.org/148314113
IDR: 148314113 | УДК: 355.54
Mathematical model functioning of the "operator - simulator" control system
The article is devoted to the management system optimization of the training facilities of workshops maintenance. The purpose of the research is to study the behavior of complex objects, such as training tools and their management systems, to develop the mathematical model of the management system of training tools, oriented to the framework of simulation models usage. The authors have developed the mathematical model describing the process of performing the operation by the trainee, with the functioning of the training tool of the maintenance workshop, the application of which would allow the implementation of modern approaches in the control systems for such type of simulators. The system of linear equations with variable coefficients is presented in the article, which is the basis for developing the simulation model that is programmable in the MATLAB / Simulink and which would allow analyzing the system conduction taking into account the factors influencing the simulated system and with the purpose of further optimizing the design solutions. As a result, the application of modern approaches, in particular optimization, to the design of the management system of the training and training facility of the maintenance workshop helps to improve the rates of mastering military equipment.
Текст научной статьи Математическая модель процесса функционирования системы "оператор - тренажер"
Моделирование – метод в научном исследовании, позволяющий изучить объект (оригинал) путем создания и исследования его копии (модели) не в натурных условиях, а на модели этого объекта [1, 2].
В нашем случае объектом исследования является процесс функционирования системы управления учебно-тренировочным средством (далее функционирование УТС).
Целью исследования является формальное описание операции в процессе функционирования учебно-тренировочного средства, которое является основой для разработки имитационной модели системы управления УТС [3, 4].
ПОСТАНОВКА ЗАДАЧИ
Управление есть процесс формирования рационального поведения системы при выполнении операции. Процесс подготовки и принятия решения оператором, а также организация их выполнения и контроль активных средств, входящих в периферийное окружение системы управления, составляет сущность описания операции [5, 6].
Анализ существующих средств моделирования и решаемых с его помощью задач показывает, что комплексное решение проблем построения системы управления учебно-тренировочным средством возможно лишь на основе единой формальной математической схемы [7, 8, 9, 10].
МЕТОДЫ И МАТЕРИАЛЫ
Под функционированием УТС следует понимать выполнение обучаемым операции путем воздействия на органы управления и отклика тренажерного средства в виде сигнала отображаемого на контрольно-измерительных приборах с учетом сбора, оценки и передачи информации. В свою очередь функционирование учебно-тренировочного средства является сложным комплексом взаимосвязанных подсистем и устройств, среди которых выделяется три основных подсистемы:
-
- C1 – подсистема сбора информации и формирования аналогово сигнала управления в результате работы органов управления и контрольно-измерительных приборов;
-
- C2 – подсистема, в которой учитываются действия обучаемого в модулях рабочего места оператора, условно ее можно назвать оператором, выполняющим тренировочный цикл на учебно-тренировочном средстве;
-
- C0 – подсистема обработки информации, контроля, оценки и формирование цифрового сигнала управления, за который отвечает модуль управления и контроля.
Подсистема C1 включает в свой состав набор датчиков, коммутатор, блок кодирования информации, обеспечивающих формирование вектора аналогово сигнала Y(t) направленного на управляемый объект. Подсистема C0 представляет собой вычислительный комплекс, состоящий из блока H1 и H2, при этом H1 управляет
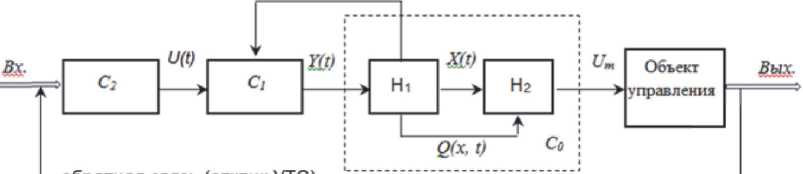
обратная связь (отклик УТС)
Рис. 1. Функциональная схема основных элементов системы управления
процессом опроса и приема информации о векторе Y(t), на его основе блок H2 оценивает вектор состояния управляемого объекта X(t) и область его допустимых значений Q(x,t). При значениях X(t), принадлежащих Q(x,t), никаких управляющих воздействий на объект не проводится. При неправильных действиях оператора, т.е. в случае когда X(t) не принадлежит Q(x,t), подсистема C0 формирует вектор управления Um, поступающий в виде сообщения об «ошибке». Подсистема C2 служит для формирования воздействия U(t) на объект управления через C1 и C0, в состав которой входят исполнительные механизмы объекта, воспроизводимого в учебно-тренировочном средстве. Обобщенная функциональная схема системы приведена на рисунке 1 [11, 12].
Особенностью рассматриваемого класса учебно-тренировочных средств является то, что тренировочный цикл представляет собой последовательность чередующихся между собой однотипных фаз длительностью (t+1 - t) (рисунок 2). На каждой из фаз можно выделить как минимум два этапа. На первом этапе определяется текущий вектор формирования задания Y(t). При этом в функционировании системы задействованы только две из трех подсистем, а именно С0, С1. На втором этапе подсистема С2 на основе вектора формирования задания Y(t), а в последующем и предыдущем шаге действий, оценивает состояние управляемого объекта X(t), а подсистема С0 находится в режиме готовности к началу функционирования сигнала Um (С0 находится в не-нагруженном состоянии), при достижении X(t) критических значений X кр с целью блокировки исполнительных органов для предотвращения аварийной ситуации и выдачи соответствующего сообщения об ошибке (С0 находится в нагруженном состоянии).
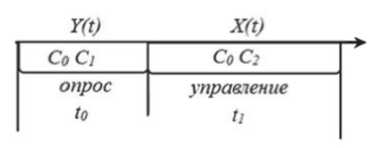
Рис. 2. Тренировочный цикл учебно-тренировочного средства
Отличительной чертой данной системы является то, что подсистема С0 функционирует постоянно, подсистема С1 периодически включается в работу при поступлении управляющих воздействий с подсистемы С2, которая находится в постоянной готовности вступить в работу после принятия соответствующего решения, что напрямую влияет на результат операции и накладывает на нее высокие требования с точки зрения надежности ее функционирования.
Предполагается, что каждая из подсистем удовлетворяет требуемым техническим показателям по надежности и т.п., но обладает собственными показателями точности, качеству, быстродействию на каждом из этапов. В этих условиях актуальной является разработка критерия оценки эффективности функционирования системы, учитывающего выполнение операции как последовательность чередующихся между собой фаз, что позволит проводить сравнительный анализ разных структур построения учебно-тренировочных средств данного класса [13, 14, 15, 16, 17].
В соответствии с произведенным описанием можно установить, что учебно-тренировочное средство, оператор и выполняемая операция представляют собой систему, которая в любой момент времени может находиться в одном из следующих шести различных возможных состояний S:
-
S0 – операция находится в исходном состоянии, поступило задание о виде выполняемой операции, подсистемы C1, C2 функционируют в штатном режиме, C0 находится в ненагружен-ном состоянии;
-
S1 – алгоритм операции выполнен правильно, сообщение об «ошибке» не поступало, подсистемы C1, C2 функционирует в штатном режиме, C0 находится в ненагруженном состоянии;
-
S2 – неправильно выполнен алгоритм, поступило сообщение об «ошибке», подсистемы C1 функционирует в штатном режиме, C2 функционирует неправильно, C0 находится в нагруженном состоянии;
-
S3 – выполнена команда оператором по устранению ошибки, подсистема C1 функционирует в штатном режиме, C2, C0 находится в нагруженном состоянии;
-
S4 – оператор не выполняет никаких действий согласно алгоритму, подсистемы C1, функционирует в штатном режиме, C2 не функционирует (сбой работы), C0 находится в не- нагруженном состоянии;
-
S5 – операция выполнена правильно.
Переход из одного состояния в другое определяется следующими потоками событий и их интервалами:
-
в ( t) - неправильное выполнение команды, совершение повторной ошибки;
-
5 ( t) - выполнение команды по устранению ошибки;
-
a ( t) - нарушение порядка действий оператора при выполнении алгоритма операции;
-
Y ( t) - отсутствие действий оператора по выполнению алгоритма операции;
-
т ( t) - правильные действия оператора при выполнении алгоритма операции;
Un(t) Pn(t) – финал выполнения операции (включение оборудования).
Состояние S5 «финальное». Когда оно достигается, процесс выполнения операции прекращается. Предположим, что процесс выполнения операции произвольно выбранного времени t, такого, что 0 ≤ t ≤ T, параметры, определяющие эффективность выполнения операции и характеризующие нарушение действий оператора или прекращение его активности постоянны. Тогда возможные переходы системы из состояния в состояние в соответствующие им вероятности перехода за малый промежуток времени At могут быть описаны в таблице и блок-схемой состояний на рисунке 3.
Т – максимальное время, отводимое на выполнение операции (тренировки).
Если рассмотреть состояние S0, то можно отметить вероятность того, что операция будет выполнена, а возобновление активности оператора на каждом шаге тренировки не зависит от того, что было перед ним: S2, S3, S4, т.е. отсутствует накопление информации о предыдущем шаге алгоритма в рамках выполнения одной операции, в связи с разными типами выполняемых действий обучаемыми, при условии что оператор выполняет норматив впервые.
Значит, вероятность событий выполнения операции не зависит от того, в каком состоянии находилось учебно-тренировочное средство до начала (S2, S3, S4).
Таким образом, для каждого момента времени t0 вероятность любого состояния системы в будущем (при t > t0) можно считать зависит только от его состояния в настоящем (при t = t0) и не зависит от того, когда и каким образом система пришла в это состояние (т.е. как развивался процесс во времени). Значит, процесс выполнения операции в учебно-тренировочном средстве можно представить, как неоднородный Марковский случайный процесс.
Обозначим P^t) - вероятность того, что в момент времени t процесс выполнения операции будет находиться в состоянии S1, S2 … S5, несовместимы и образуют полную группу. Зная взаимосвязь состояний (таблица 1 и рисунок 3), можно описать систему уравнений Колмогорова [18, 19], описывающую по времени изменение вероятностей P i (t) :
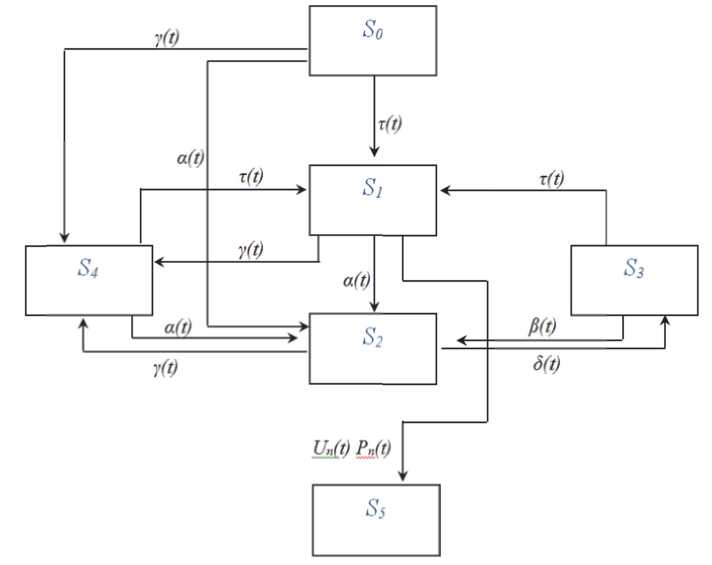
Рис. 3. Блок-схема состояний процесса выполнения операции
Таблица 1. Структура возможных переходов за время ∆ t и соответствующие значения вероятностей P i (t)
|
Состояние к моменту времени t |
Возможные переходы в другие состояния за время At |
|||
|
Обозна чение |
Характеристика состояний |
Обозна чение |
Характеристика происходящего события |
Вероятно сть перехода |
|
S 0 |
операция находится в исходном состоянии, поступило задание о виде выполняемой операции, подсистемы C i , C 2 функционируют в штатном режиме, C o находится в ненагруженном состоянии; |
S 1 |
оператор выполняет правильные действия |
1(0 |
|
S 2 |
оператор выполняет не правильные действия, совершена ошибка |
a (t) |
||
|
S 4 |
оператор не воздействует на объект в течение времени ( Т ожидания ) |
y(t) |
||
|
S 1 |
алгоритм операции выполнен правильно, сообщение об «ошибке» не поступало, подсистемы C i , C 2 функционирует в штатном режиме, C o находится в ненагруженном стоянии; |
S 5 |
Операция выполнена правильно (включение оборудования) |
V „ (t) P n (t) |
|
S 2 |
оператор выполняет не правильные действия, совершена ошибка |
a(t) |
||
|
S 4 |
оператор не воздействует на объект |
y(t) |
||
|
S 2 |
не правильно выполнен алгоритм, поступило сообщение об «ошибке», подсистемы C i функционирует в штатном режиме, C 2 функционирует неправильно, C o находится в нагруженном состоянии; |
S 3 |
выполнение команды по устранению ошибки |
5(t) |
|
S 4 |
оператор не воздействует на объект |
y(t) |
||
|
S 3 |
выполнена команда оператором по устранению ошибки, подсистема C i , функционирует в штатном режиме, C 2 , C o находится в нагруженном состоянии; |
S 1 |
оператор выполняет правильные действия |
T (t) |
|
S 2 |
оператор выполняет не правильные действия, совершена повторная ошибка |
P(t) |
||
|
S 4 |
оператор не выполняет ни каких действий согласно алгоритма, подсистемы C i , функционирует в штатном режиме, C 2 не функционирует (сбой работы), C o находится в не нагруженном состоянии. |
S 1 |
оператор выполняет правильные действия |
T(t) |
|
S 2 |
оператор выполняет не правильные действия, совершена ошибка |
a (t) |
||
В качестве математической модели объекта рассмотрим систему дифференциальных уравнений:
^52 = _[T(t)+a(t)+Y(t)]. p0(t). dt
^p 5 7t) = HaW + vCt) + « п (ЖГО] . P1(t) + т(У • [Р о (У + P3(t) + P4(t)];
= _[6(t) + Y(t)] • P2(t) + P(t) • P3(t) + a(t) • [P o (t) + P i (t) + P 4 (t)]; dt
5^ = _[P(t) + T(t)] • P3(t) + S(t) • P2(t).
dt dP.(t)
-dp = _[T(t) + a(t)J • R , (t) + Y(t) • [P o (t) + P i (t) + P 2 (t)];
dPd(t) = » n (t)P n (t) • P i (t).
Система представляет собой систему линейных уравнений с переменными коэффициентами. Вследствие значительного числа уравнений и сложной связи между ними решение этой системы в аналитическом виде является громоздким, поэтому такую систему необходимо решать численно. С использованием ЭВМ решение ее особых трудностей не представляет.
ЗАКЛЮЧЕНИЕ
Описанная математическая модель процесса функционирования системы «оператор – тренажер» легла в основу разработки имитационной модели, с целью последующей верификации разработанной модели системы управления с ее оригиналом, а также прогнозирования поведения системы путем снятия показателей ее характеристик при моделировании [20, 21, 22].
Список литературы Математическая модель процесса функционирования системы "оператор - тренажер"
- Френкель А.А. Математические методы анализа динамики и прогнозирования производительности труда. М.: Экономика, 1972. 328 с.
- Татанов И.В., Авраменко В.П. Моделирование организационно-технологических систем. Рязань: Рус. слово, 1996. 224с.
- MATLAB.Exponenta.MATLAB&Toolboxes//matlab.exponenta.ru:центркомпетенций. MathWorks.2001.URL: http://matlab.exponenta.ru (дата обращения 12.10.2018)
- Дьяконов В.П. MATLAB. Полный самоучитель. Москва: ДМК Пресс, 2012. 768 с.
- Уткина В.Ф., Крючкова Ю.В. Эффективность технических систем. Том 3. Москва: Машиностроение, 1988. 328 с.
